基于粒子群算法的自動駕駛儀參數(shù)優(yōu)化
2021-08-04 08:54:08張?zhí)锾?/span>陳志華
兵器裝備工程學報 2021年7期
關鍵詞:優(yōu)化
張?zhí)锾铮?陳志華, 韓 磊, 賈 芳
(1.南京理工大學 瞬態(tài)物理國家重點實驗室, 南京 210094; 2.中國兵器工業(yè)導航與控制技術研究所,北京 100089; 3.中國兵器第三○四廠,山西 長治 046012)
1 引言
導彈的制導控制系統(tǒng)是實現(xiàn)導彈擊毀目標的關鍵[1]。自動駕駛儀是制導控制系統(tǒng)中至關重要環(huán)節(jié)[2],確保導彈精確、魯棒地跟蹤制導系統(tǒng)生成的控制指令是它的核心任務[3]。對于新一代近距空空格斗導彈,要求其具有很高的機動性[4-5],要求在保持穩(wěn)定性的同時快速響應加速度指令,提供大機動性[6-7]。加速度計與質(zhì)心距離參量c是設計自動駕駛儀需要考慮的重要因素。現(xiàn)有的研究中,對于參量c的處理主要有3種:一是直接忽略它的影響[8];二是對其合理利用[9];三是設計中引用濾波器消除參量c的影響[10]。參量c對于控制輸入舵偏、系統(tǒng)響應速度、系統(tǒng)的穩(wěn)定性都有重要影響,忽略c不僅會導致系統(tǒng)響應慢、穩(wěn)定裕度低,而且會導致對舵偏需求過高。系統(tǒng)需要的舵偏越大,對舵機的要求就越高,這將在一定程度上影響導彈的控制效果。目前對參量c的研究較少,且未能與粒子群尋優(yōu)算法設計緊密結(jié)合以實現(xiàn)系統(tǒng)整體控制性能最優(yōu)。
2 基于擴展LQR的自動駕駛儀設計
俯仰自動駕駛儀的設計將被設定為一個LQR最優(yōu)控制問題,需要對“標準”LQR問題進行擴展,包括目標中的前饋項、輸出反饋等。
對于采用軸對稱布局的導彈,俯仰和偏航運動方程相似,只有符號正負性不同,所以下面用俯仰通道為例進行研究,其控制方程組可表示為:
(1)

標準的LQR問題不考慮Du項,本文引入Du項設計自動駕駛儀;自動駕駛儀的設計屬于LQR跟蹤問題,,對于階躍指令,跟蹤問題可轉(zhuǎn)為定點調(diào)節(jié)問題[11]。
給出狀態(tài)空間
(2)
式中:ayc、ay分別表示過載指令和輸出過載;KDC閉環(huán)增益調(diào)節(jié)系數(shù);V為彈體速度。
H=[Vbδ-caδ-caω],L=[Vbδ-caδ]
以“消除過載誤差、減少舵偏輸入”為控制目標,建立LQR調(diào)節(jié)器問題的目標函數(shù)
(3)
基于式(3)構造Hamilton函數(shù),并做出以下假設:
假設1:u無約束;
假設2:最優(yōu)性能指標具有二次型的形式;
參照文獻[12]可以得到最優(yōu)輸出反饋控制率u*
u*=-(I+FoptD)-1Fopt(Cx-[KDC0]Tayc
(4)
式中:Fopt為輸出反饋矩陣。
為了使系統(tǒng)能夠精確跟蹤加速度指令,需確定調(diào)節(jié)系數(shù)KDC。
將式(4)代入狀態(tài)空間(2),根據(jù)終值定理
(5)
得到
(6)
式中:
其中“×”表示該矩陣與(I+FoptD)-1Fopt相乘,例L×表示L(I+FoptD)-1Fopt。
3 粒子群算法
3.1 優(yōu)化目標數(shù)學模型
為了提高彈體響應速度、減少舵偏輸入、改善阻尼,選用調(diào)節(jié)時間t、超調(diào)量γ、舵偏角δε構成目標函數(shù)。其中,調(diào)節(jié)時間表示系統(tǒng)的響應,超調(diào)量表示系統(tǒng)的阻尼[13]。為了保證姿態(tài)控制系統(tǒng)的穩(wěn)定性,一般情況,選取幅值裕度Gm>6 dB,相位裕度Pm>30 rad/s。同時為了簡化優(yōu)化過程,避免參量相互影響,引入權重系數(shù)a1、a2、a3將多目標優(yōu)化轉(zhuǎn)化為單目標優(yōu)化。圖1為優(yōu)化目標函數(shù)圖形,用顏色表示第四維函數(shù)值f。
圖1 優(yōu)化多目標模型函數(shù)圖形
(7)
式中:a1、a2、a3分別代表γ、t、δε的權重系數(shù)。
3.2 粒子群算法優(yōu)化流程
文獻[14]給出加速度計與質(zhì)心距離參量c的約束范圍,在試驗過程中發(fā)現(xiàn),參量c過大會導致實際穿越頻率與期望穿越頻率偏差過大,參量c偏小會導致系統(tǒng)穩(wěn)定裕度極低,進而影響系統(tǒng)的穩(wěn)定性。出于工程上實際應用的考慮,綜合彈體結(jié)構布局、彈性等多方面因素,本文選取c在[-1,1]的約束范圍。
步驟1:采用Matlab指令rands隨機生成初始化粒子和粒子速度,種群規(guī)模選擇50;
步驟2:采用式(7)計算每個粒子的適應度,選取個體的局部最優(yōu)位置向量Pgj種群的全局最優(yōu)位置向量Pzj;
步驟3:采用式(8)更新粒子位置和速度;
Vj=Vj+C1rand(Pgj-Xj)+C2rand(Pzj-Xj)
Xj=Xj+0.5Vj
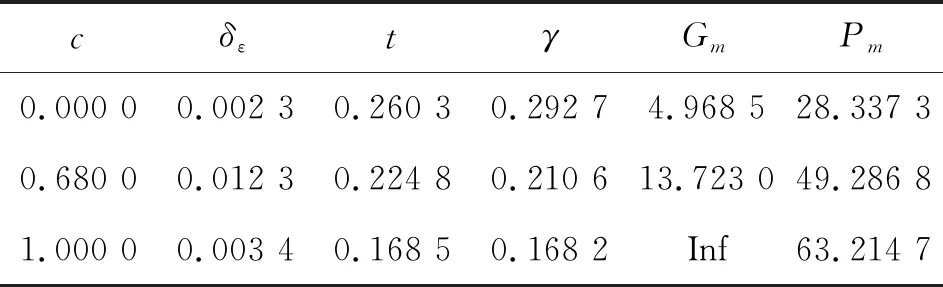
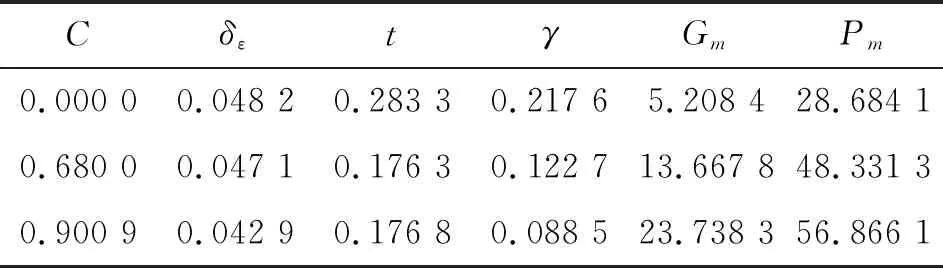
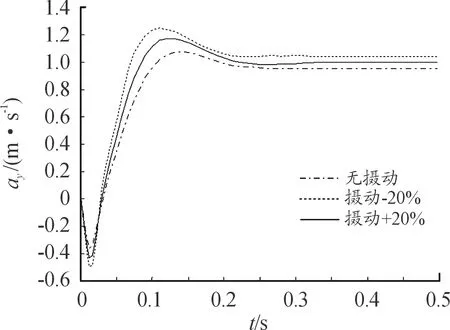
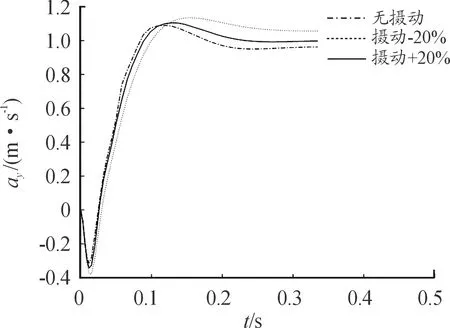
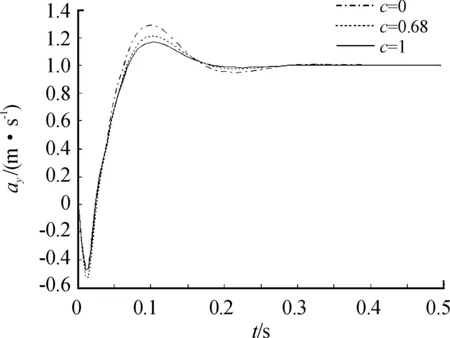
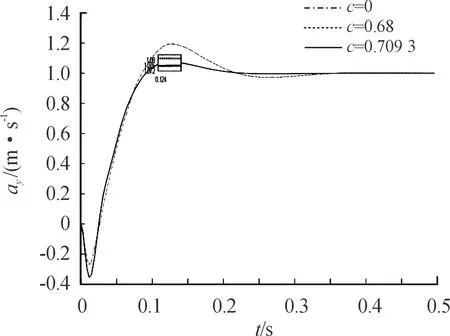
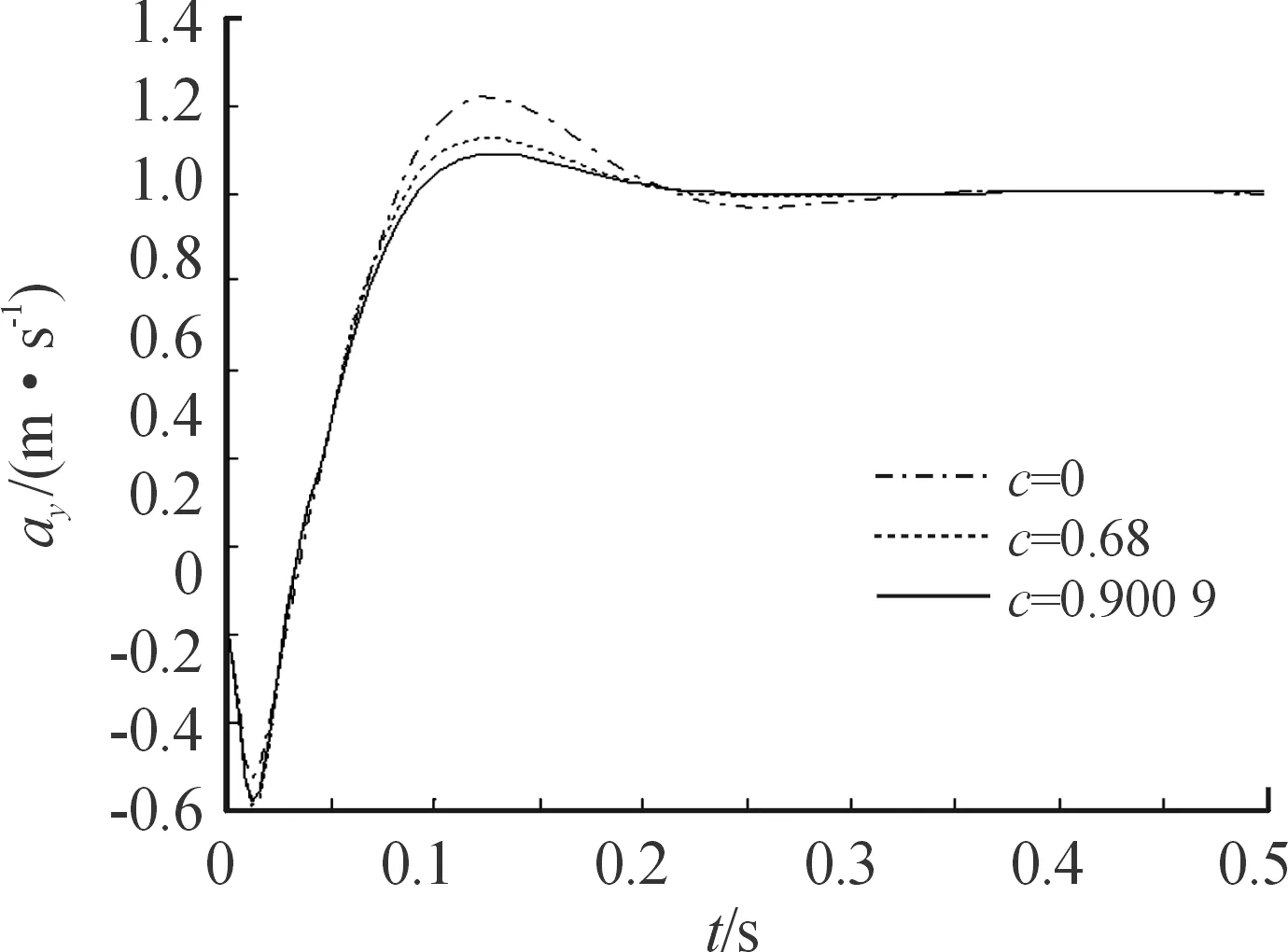
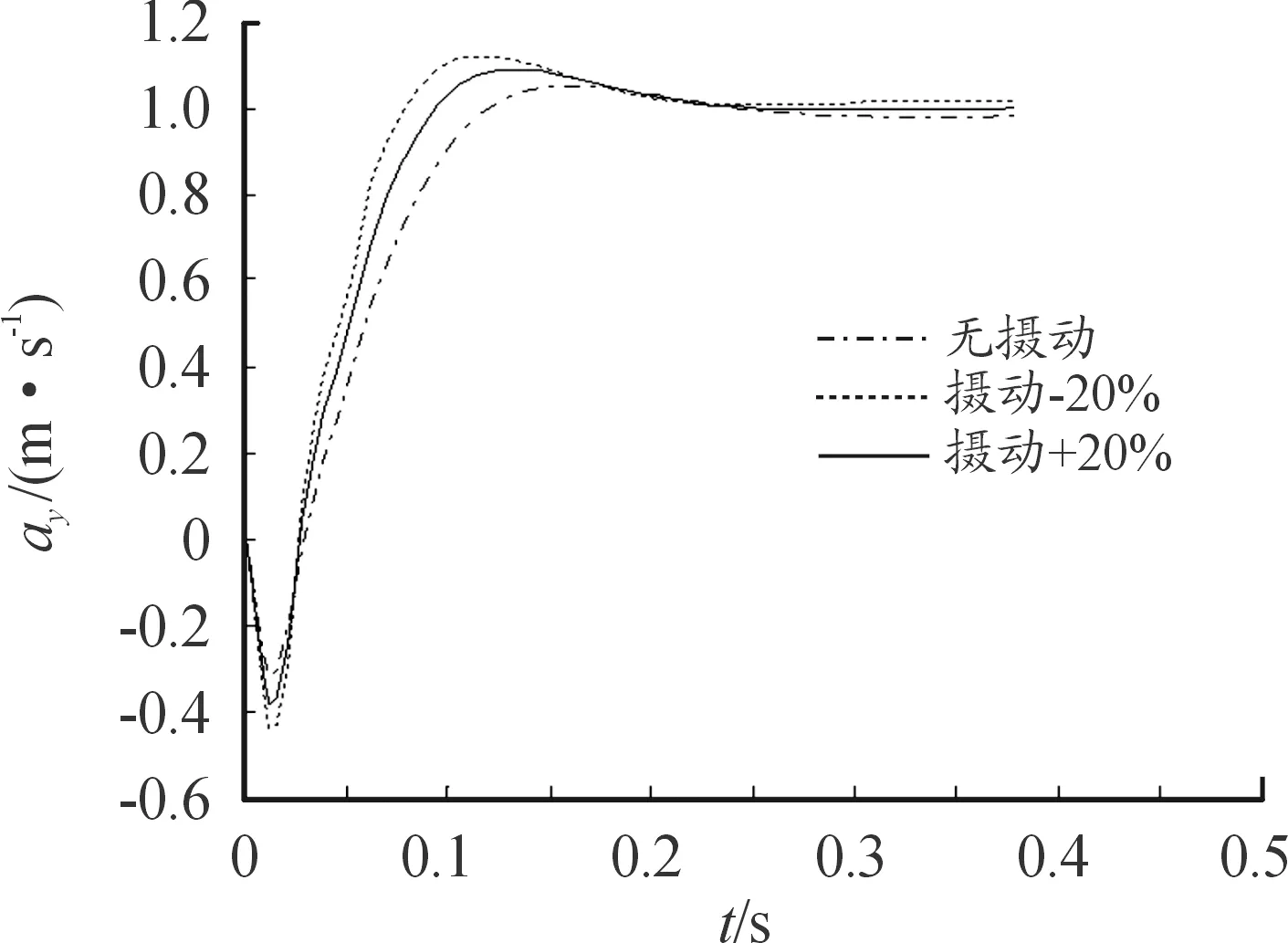
-1 -1 (8) 式中:C1=C2=1.494 45 步驟4:基于步驟3更新的種群,采用式(8)重新計算粒子適應度,判斷是否滿足終止條件,若不滿足,返回步驟2; 步驟5:選取迭代次數(shù)為50,當達到迭代次數(shù)終止迭代。 圖2 粒子群算法優(yōu)化流程框圖 本文以某空空導彈的某一特征點為例進行仿真分析,該特征點動力系數(shù)如表1所示。設開環(huán)穿越頻率為WCR=45 rad/s,舵機頻率ω=220 rad/s,阻尼ζ=0.65。靜穩(wěn)定彈體aα=250靜中立aα=0靜不穩(wěn)定彈體aα=-250。 表1 特征點動力系數(shù) 表2給出LQR加權陣選值,選取恰當?shù)募訖嚓嚳梢允瓜到y(tǒng)達到期望的WCR。 表2 LQR加權陣選值 補充說明: c=0:表示忽略距離參量; c=0.68:表示距離參量c的一般取值; 下面分別對靜穩(wěn)定彈體、靜中立穩(wěn)定彈體、靜不穩(wěn)定彈體優(yōu)化結(jié)果進行分析。 1) 表3為靜穩(wěn)定彈體的粒子群算法優(yōu)化結(jié)果。c=1,表示優(yōu)化后的距離參量c的取值。分析表3數(shù)據(jù)可知,優(yōu)化后減少72%舵偏角,超調(diào)量從21.1%優(yōu)化到16.8%,調(diào)節(jié)時間從0.23 s優(yōu)化到0.17 s。而且穩(wěn)定裕度也有大幅度的上升,幅值裕度從13.7 dB上升到Inf dB,相角裕度從49 rad/s上升到63 rad/s。 表3 靜穩(wěn)定粒子群優(yōu)化結(jié)果 2) 表4為靜不穩(wěn)定彈體的粒子群算法優(yōu)化結(jié)果。c=0.709 3,表示優(yōu)化后的距離參量c的取值。分析表4數(shù)據(jù)可知,優(yōu)化后減少約為1%舵偏角,超調(diào)量從8%下降到7%,調(diào)節(jié)時間幾乎不變。穩(wěn)定裕度也小福度上升,幅值裕度從12.3 dB上升到13.2 dB,相角裕度從44 rad/s上升到46 rad/s。 表4 靜不穩(wěn)定粒子群優(yōu)化結(jié)果 3) 表5為靜中立穩(wěn)定彈體的粒子群優(yōu)化結(jié)果。c=0.900 9,表示優(yōu)化后的距離參量c的取值。分析表5數(shù)據(jù)可知,雖然優(yōu)化后調(diào)節(jié)時間有小幅度的上升,從0.176 3 s上升到0.176 8 s,但在超調(diào)量,舵偏方面有明顯的優(yōu)化效果。 表5 靜中立穩(wěn)定粒子群優(yōu)化結(jié)果 優(yōu)化后,超調(diào)量從12%優(yōu)化到8%,舵偏減少8.9%。而且,穩(wěn)定裕度也有大幅度的上升,幅值裕度從13.6 dB上升到23.7 dB,相角裕度從48 rad/s上升到57 rad/s。 上述分析都是基于優(yōu)化后距離參量與一般情況c=0.68,可以直觀地看出,忽略距離參量c并不是一個很好的選擇。事實上,在自動駕駛儀設計中考慮c,即在加速度計測量信息中引入彈體姿態(tài)角加速度信息,相當于回路含有一個微分環(huán)節(jié),具有超前作用,通常稱為加速度計的“杠桿效應”[15]。距離參量c的取值越大,c回路超前作用越明顯,系統(tǒng)越穩(wěn)定,超調(diào)越小。 導彈氣動參數(shù)攝動會引起模型的變化[16],分析基于粒子群設計的自動駕駛儀在氣動參數(shù)偏差±20%輸出響應。 1) 靜穩(wěn)定彈體參數(shù)攝動輸出響應曲線如圖3所示。 圖3 靜穩(wěn)定參數(shù)攝動輸出響應曲線 氣動參數(shù)攝動+20%,穩(wěn)態(tài)輸出偏差4.9%。氣動參數(shù)攝動-20%,穩(wěn)態(tài)輸出偏差5.9%。 2) 靜不穩(wěn)定彈體參數(shù)攝動輸出響應曲線如圖4所示。氣動參數(shù)攝動+20%,穩(wěn)態(tài)輸出偏差3.6%。氣動參數(shù)攝動-20%,穩(wěn)態(tài)輸出偏差6%。 圖4 靜不穩(wěn)定參數(shù)攝動輸出響應曲線 3) 靜中立穩(wěn)定彈體參數(shù)攝動輸出響應曲線如圖8所示。氣動參數(shù)攝動+20%,穩(wěn)態(tài)輸出偏差1.2%。氣動參數(shù)攝動-20%,穩(wěn)態(tài)輸出偏差1.8%。 圖3~圖8可以看出,優(yōu)化結(jié)果可以快速響應加速度指令,并較好地抑制氣動參數(shù)變化。 圖5 靜穩(wěn)定優(yōu)化前后輸出響應曲線 圖6 靜不穩(wěn)定優(yōu)化前后輸出響應曲線 圖7 靜中立穩(wěn)定優(yōu)化前后輸出響應曲線 圖8 靜中立穩(wěn)定參數(shù)攝動輸出響應曲線 本文在綜合考慮舵偏、穩(wěn)定性、響應特性等方面的情況下,分析不同加速度計與質(zhì)心距離參量對駕駛儀性能的影響,并結(jié)合粒子群算法尋求到最優(yōu)距離參量。研究表明,基于粒子群優(yōu)化算法設計的自動駕駛儀需求更小的舵偏,降低對彈體結(jié)構的需求,并在穩(wěn)定性、響應特性方面也有大幅度提高,能夠較好地抑制氣動參數(shù)變化,在工程上也具有實用性。
4 仿真分析
4.1 特征點仿真分析


4.2 參數(shù)攝動分析
5 結(jié)論
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14能源工程(2022年1期)2022-03-29 01:06:28建材發(fā)展導向(2021年12期)2021-07-22 08:06:48建材發(fā)展導向(2021年7期)2021-07-16 07:07:52中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59消費導刊(2018年8期)2018-05-25 13:20:08家庭影院技術(2018年4期)2018-05-09 07:07:41電子制作(2017年20期)2017-04-26 06:57:45