通用航空集成航電系統(tǒng)GPS延遲時間的分析
2021-07-30 09:13:06叢超
測控技術(shù) 2021年7期
叢 超
(安徽華明航空電子系統(tǒng)有限公司,安徽 蕪湖 241000)
全球定位系統(tǒng)(GPS)信號在現(xiàn)代軍、民領(lǐng)域應(yīng)用廣泛,其在航空導(dǎo)航方面的使用尤為突出。GPS信號可以提供高精度的位置、速度和定時等導(dǎo)航信息,是飛行員或自動駕駛儀操控飛機的重要依據(jù)。
通用航空的集成航電系統(tǒng)多采用實時多分區(qū)的系統(tǒng)架構(gòu)[1-2],由于系統(tǒng)軟、硬件的固有缺陷和信號傳輸?shù)仍颍珿PS信號從接收到使用的過程中,必然存在一定的時間延遲。從目前各類通用飛機的典型航電系統(tǒng)架構(gòu)來看,例如美國Garmin公司的G1000航電系統(tǒng)、美國Avidyne公司的Entegra航電系統(tǒng)(這兩套系統(tǒng)在全球中低端通用飛機中的安裝比例占80%以上)。航電系統(tǒng)的發(fā)展向綜合化和模塊化趨勢進化,主要以綜合顯示器(Primary Flight Display,PFD和Multi-Function Display,MFD)為核心構(gòu)建整個系統(tǒng),系統(tǒng)綜合化程度非常高,綜合顯示器除了完成系統(tǒng)的集中顯示控制功能外,還作為機載計算機,通過應(yīng)用軟件實現(xiàn)飛行管理、狀態(tài)監(jiān)控、合成視景等系統(tǒng)核心處理功能,實現(xiàn)顯示控制與處理的綜合。因此軟件計算過程中的延遲因素成為GPS信號延遲時間中越來越不可忽視的一部分。時間延遲對飛行帶來潛在的危害,速度越快,潛在的危害就越大。因此,GPS信號和航電系統(tǒng)之間的實時數(shù)據(jù)同步問題必須解決,對時間延遲的準確測量是工程上的難點[3]。文獻[4]以速度和位置誤差為觀測量,采用卡爾曼濾波算法對系統(tǒng)進行信息融合;文獻[5]~文獻[9]對汽車的定位精度和GPS延遲時間進行研究,但不能滿足高速飛行精度要求;文獻[10]~文獻[14]沒有給出針對時間延遲的補償方法,或者給出的方法并不適用通用航空航電系統(tǒng)。
通用航空的機載集成航電系統(tǒng)功能越來越強大,但上述文獻中的現(xiàn)有研究均未對通用航空集成航電系統(tǒng)的GPS延遲時間進行論述,特別是沒有針對應(yīng)用軟件在航電系統(tǒng)中所占比例不斷增加的趨勢,深入分析軟件算法與GPS延遲因素之間的關(guān)系。結(jié)合通用航空集成航電系統(tǒng)GPS信號使用的原理,根據(jù)系統(tǒng)中應(yīng)用軟件相關(guān)算法的特性,將延遲時間分為可測量部分和未知部分兩份估算,計算最大可測量部分時間,用卡爾曼濾波法得出未知部分最優(yōu)估計值,從而得出相對準確的延遲時間的總估算值。
1 時間延遲的原因
通用航空集成航電系統(tǒng)在GPS信號使用方面,基本結(jié)構(gòu)框圖如圖1所示。

圖1 集成航電系統(tǒng)GPS信號使用框圖
數(shù)據(jù)處理一般流程為:GPS信號接收機接收和解析信號,通過總線傳遞數(shù)據(jù)至計算服務(wù)分區(qū)(ACR)。ACR中GPSserver服務(wù)格式化數(shù)據(jù)并發(fā)布,導(dǎo)航子系統(tǒng)讀取數(shù)據(jù)、解析出位置和狀態(tài)信息。
產(chǎn)生時間延遲的因素主要有4方面:① GPS信號接收機數(shù)據(jù)接收和解算延遲;② 接收機傳輸?shù)紸CR的傳輸時間;③ GPSserver處理數(shù)據(jù)時間;④ 導(dǎo)航子系統(tǒng)處理數(shù)據(jù)時間。
2 延遲時間估算
延遲時間估算原理圖如圖2所示,可分為4步:① 粗略估計總延遲時間;② 獲得延遲時間中的可測量部分;③ 獲得未知部分的最優(yōu)估計值;④ 得到總延遲時間。
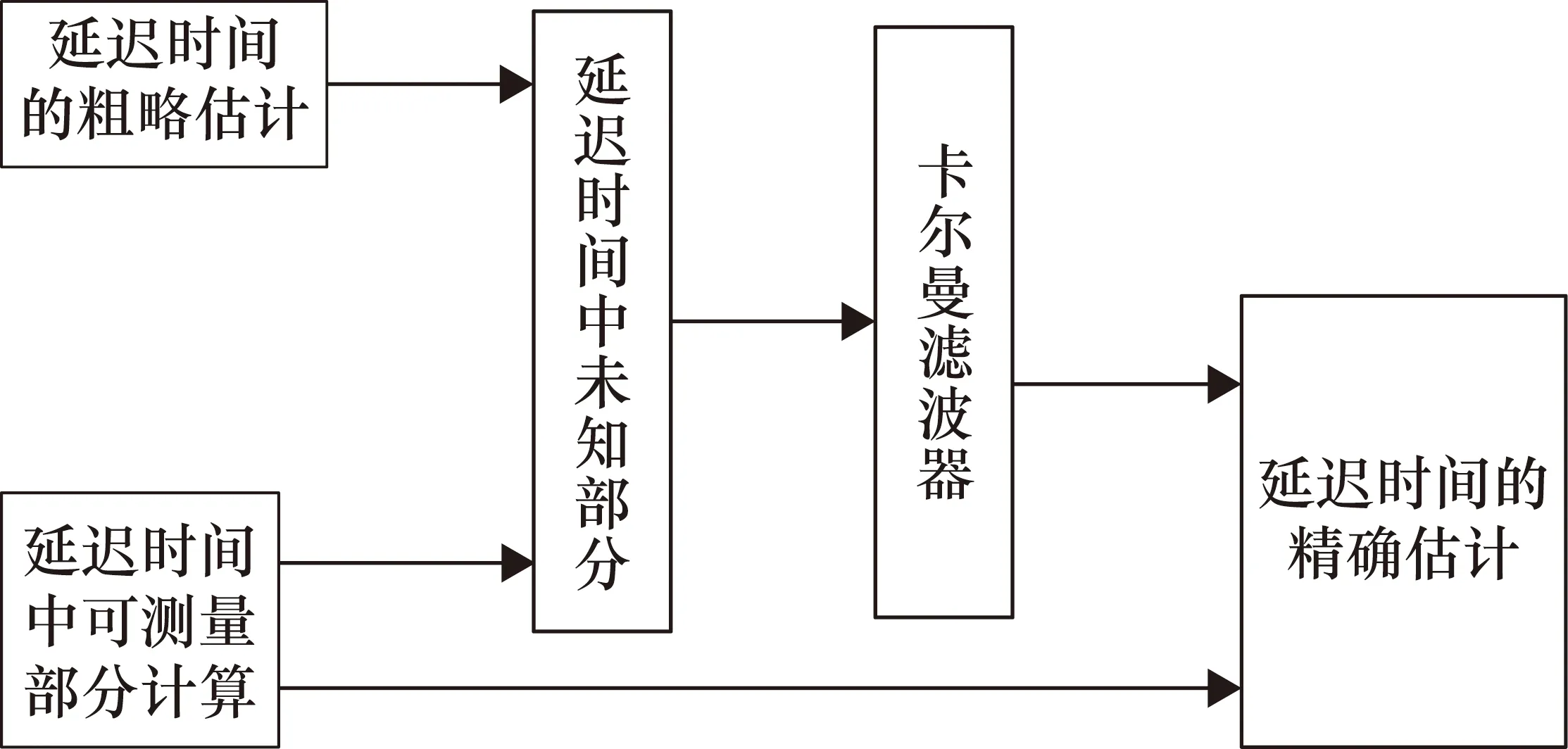
圖2 延遲時間估算的原理圖
2.1 粗略的時間延遲估計方法
粗略的時間延遲估計有兩種方法:飛行數(shù)據(jù)比較法和航向差或速度差檢測法。
2.1.1 飛行數(shù)據(jù)比較法
參考文獻[7]中的分析方法,利用飛行數(shù)據(jù)記錄中的GPS數(shù)據(jù)和航姿參考系統(tǒng)(AHRS)數(shù)據(jù),在同一坐標系內(nèi)繪制轉(zhuǎn)彎-時間曲線,得出GPS信號中的轉(zhuǎn)彎遲滯于AHRS系統(tǒng)轉(zhuǎn)彎的數(shù)據(jù)。計算其在不同延遲校正下的差值平方和,進行最小二乘法濾波處理,計算極值對應(yīng)的時間延遲。
2.1.2 航向差或速度差檢測法
飛行時實時解算GPS和AHRS數(shù)據(jù),參考文獻[8]中的航向差檢測算法和速度檢測算法,分別計算時間延遲,取最佳值。兩種方法具體如下所述。
(1) 航向差檢測算法。
分別提取一段時間內(nèi)AHRS的航向角速度積分的角度(注意是磁航向角而不是陀螺儀計算的飛機旋轉(zhuǎn)角)和根據(jù)GPS信號計算的角度,形成兩列航向差測量序列,使兩個序列差值的歐幾里得范數(shù)最小,檢測準則為

(2) 速度檢測算法。
分別提取一段時間內(nèi)AHRS加速度積分的速度(注意不是大氣數(shù)據(jù)計算機計算的空速)和根據(jù)GPS信號計算的速度,形成兩列航向差測量序列,使兩個序列差值的歐幾里得范數(shù)最小,檢測準則為

這兩種算法各有優(yōu)劣,對于汽車等低速運動物體可以滿足使用,但對于高速移動的物體,如飛行器等,顯然其精度無法滿足要求,需要在粗略估計的基礎(chǔ)上進一步分析,估算更精確的延遲時間。
2.2 可測量部分的確定
圖3為定性的分析GPS信號數(shù)據(jù)流。圖3中的時間標準有兩套,一套是GPS時間(即UTC國際協(xié)調(diào)時),一套是ACR時間(即計算機系統(tǒng)時間)。
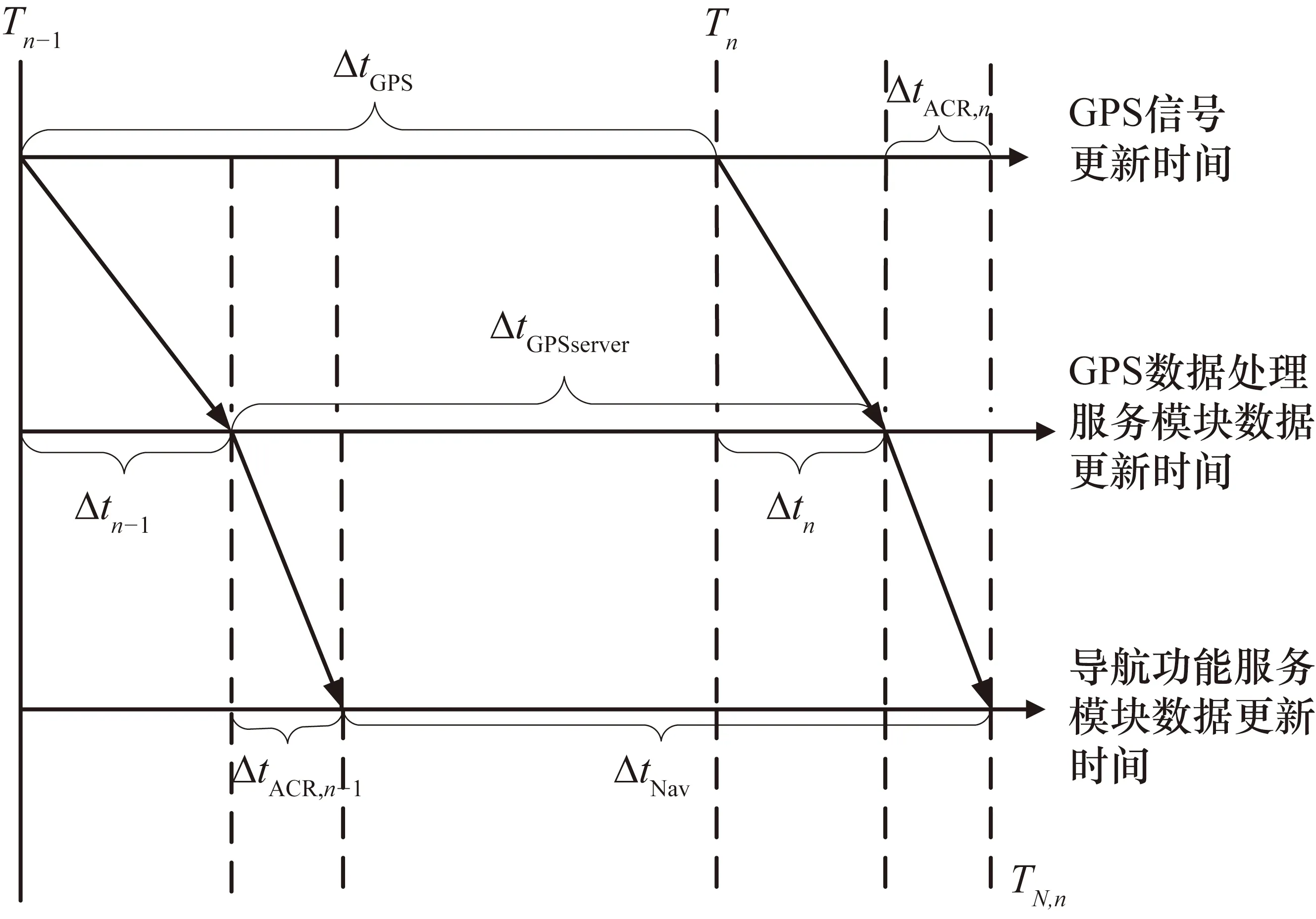
圖3 GPS信號數(shù)據(jù)流
圖3中,Tn-1為第n-1次GPS定位的時間;Tn為第n次GPS定位的時間;TN,n為第n次導(dǎo)航子系統(tǒng)數(shù)據(jù)發(fā)布時間;ΔtGPS為GPS信號發(fā)布周期;ΔtGPSserver為GPSserver數(shù)據(jù)發(fā)布周期;ΔtNav為導(dǎo)航子系統(tǒng)數(shù)據(jù)發(fā)布周期;ΔtACR,n-1為GPSserver和導(dǎo)航子系統(tǒng)第n-1次數(shù)據(jù)更新時的延遲時間;ΔtACR,n為GPSserver和導(dǎo)航子系統(tǒng)第n次數(shù)據(jù)更新時的延遲時間;Δtn-1為第n-1次GPS信號傳輸至GPSserver的延遲時間;Δtn為第n次GPS信號傳輸至GPSserver的延遲時間。
2.2.1 確定延遲時間計算公式
由圖3可知:
Tm=Tn-1+ΔtGPS+ΔtACR,n+Δtn
(1)
Tm=Tn-1+ΔtNav+ΔtACR,n-1+Δtn-1
(2)
式中,Tm為TN,n對應(yīng)的GPS時間標準的時間。
因為Tn-1是GPS信號時間戳?xí)r間,ΔtGPS可通過測量GPS信號間隔獲得,ΔtACR,n,ΔtNav,ΔtACR,n-1可通過測量ACR時間間隔獲得,它們都屬于可測量時間,所以式(1)、式(2)可簡化為
Tm=TGPSmeasure+Δtn
(3)
Tm=TNavmeasure+Δtn-1
(4)
式中,TGPSmeasure=Tn-1+ΔtGPS+ΔtACR,n;TNavmeasure=Tn-1+ΔtNav+ΔtACR,n-1。
Δtn-1,Δtn為來源于GPS信號和GPSserver之間的傳輸延遲,因為兩個時間標準不同,所以無法測量,但它們與GPS信號更新周期和GPSserver數(shù)據(jù)更新周期有關(guān)系。
① 如果ΔtGPSserver=ΔtGPS,則ΔtP=ΔtGPSserver-ΔtGPS=0,即Δtn=Δtn-1。
② 如果ΔtGPSserver>ΔtGPS,則ΔtP=ΔtGPSserver-ΔtGPS=Δtn-Δtn-1>0,即Δtn=ΔtP+Δtunknow。
則式(1)可變化為
Tm=TGPSmeasure+ΔtP+Δtunknow
(5)
③ 如果ΔtGPSserver<ΔtGPS,則ΔtP=ΔtGPS-ΔtGPSserver=Δtn-1-Δtn>0即Δtn-1=ΔtP+Δtunknow。
則式(2)可變化為
Tm=TNavmeasure+ΔtP+Δtunknow
(6)
式中,ΔtP為GPSserver和GPS數(shù)據(jù)更新的周期差;Δtunknow為Δtn-1或Δtn,均為未知時間。
計算時間延遲的目的是為了同步GPS標準時間和ACR系統(tǒng)時間,即得到Tm的準確時間。由上述分析可知,不論用哪個公式計算,Tm總是由可測量時間和未知時間兩部分組成。從估計的角度來說,未知量越小,已知量越大,Tm的估計結(jié)果相對就越準確。所以
① 當ΔtGPSserver=ΔtGPS時,如果TGPSmeasure>TNavmeasure,則用式(3)計算Tm相對準確,則時間延遲為
Δtdelay=ΔtACR,n+Δtunknow
(7)
否則,用式(4)計算Tm相對準確,則時間延遲為
Δtdelay=ΔtACR,n-1+Δtunknow
(8)
② 當ΔtGPSserver>ΔtGPS時,如果TGPSmeasure+ΔtP>TNavmeasure,則用式(5)計算Tm相對準確,則時間延遲為
Δtdelay=ΔtACR,n+ΔtP+Δtunknow
(9)
否則,用式(4)計算,時間延遲公式見式(8)。
③ 當ΔtGPSserver<ΔtGPS時,如果TGPSmeasure>TNavmeasure+ΔtP,則用式(3)計算Tm相對準確,時間延遲公式為式(7)。否則,用式(6)計算,則時間延遲為
Δtdelay=ΔtACR,n-1+ΔtP+Δtunknow
(10)
式中,Δtdelay為GPS信號更新至Nav更新數(shù)據(jù)之間的時間延遲。
由于ΔtACR,n-1,ΔtP,ΔtACR,n都是可測量的時間,所以式(7)~式(10)可簡化歸納為
Δtdelay=Δtmearsure+Δtunknow
(11)
式中,Δtmearsure為可以測量的時間延遲;Δtunknow為不可測量的時間延遲。
2.2.2 卡爾曼濾波估算未知延遲時間
由2.1節(jié)中的方法,可以得到時間延遲的粗略估計,再結(jié)合式(11),可得
Δtunknow=ΔtdelayProbale-Δtmearsure
式中,ΔtdelayProbale為利用2.1節(jié)中的方法得到的時間延遲的粗略估計。
這樣未知時間Δtunknow就有一個粗略的估計值,對其進行卡爾曼濾波解算。
系統(tǒng)狀態(tài)方程為
X(k+1)=X(k)+w(k)
系統(tǒng)觀測方程為
Z(k)= ΔtdelayProbale-Δtmearsure(k) +v(k)
式中,w(k)為系統(tǒng)噪聲;v(k)為觀測噪聲,均假定為零均值高斯白噪聲。
假定未知延遲的第n-1次最優(yōu)估計值和第n次的預(yù)測值相等,粗略估計的總延遲和可測量時間的差值作為當前的觀測值。得到第n次延遲中未知延遲的最優(yōu)化估計。利用式(11),將濾波后的未知延遲時間的最優(yōu)估計值和可測量值相加,得到最終的時間延遲。
3 實驗驗證
為檢驗算法有效性設(shè)計模擬仿真實驗,分別計算未進行延遲補償、固定延遲時間、用本算法給定最優(yōu)延遲補償3種狀態(tài)的誤差,對本算法有效性進行驗證。
3.1 實驗條件
利用航電系統(tǒng)模擬軟件Avisim,飛行速度在110~170 kn(1 kn=0.514 m/s)之間變換,時間在550 s以內(nèi),固定延遲時間擬定300 ms,計算發(fā)布速度、AHRS的速度,利用最小二乘法對其誤差平方和濾波處理,計算極值對應(yīng)的時間延遲,分析比較3種延遲的結(jié)果。
3.2 試驗結(jié)果分析
圖4~圖9分別為未進行延遲補償、給定固定延遲時間、用本算法給定最優(yōu)延遲時間3種情況的發(fā)布速度、AHRS速度曲線圖和最小二乘法濾波的曲線圖。
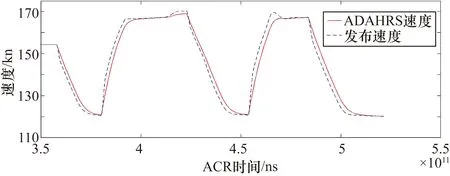
圖4 未進行延遲補償?shù)陌l(fā)布速度和AHRS速度曲線
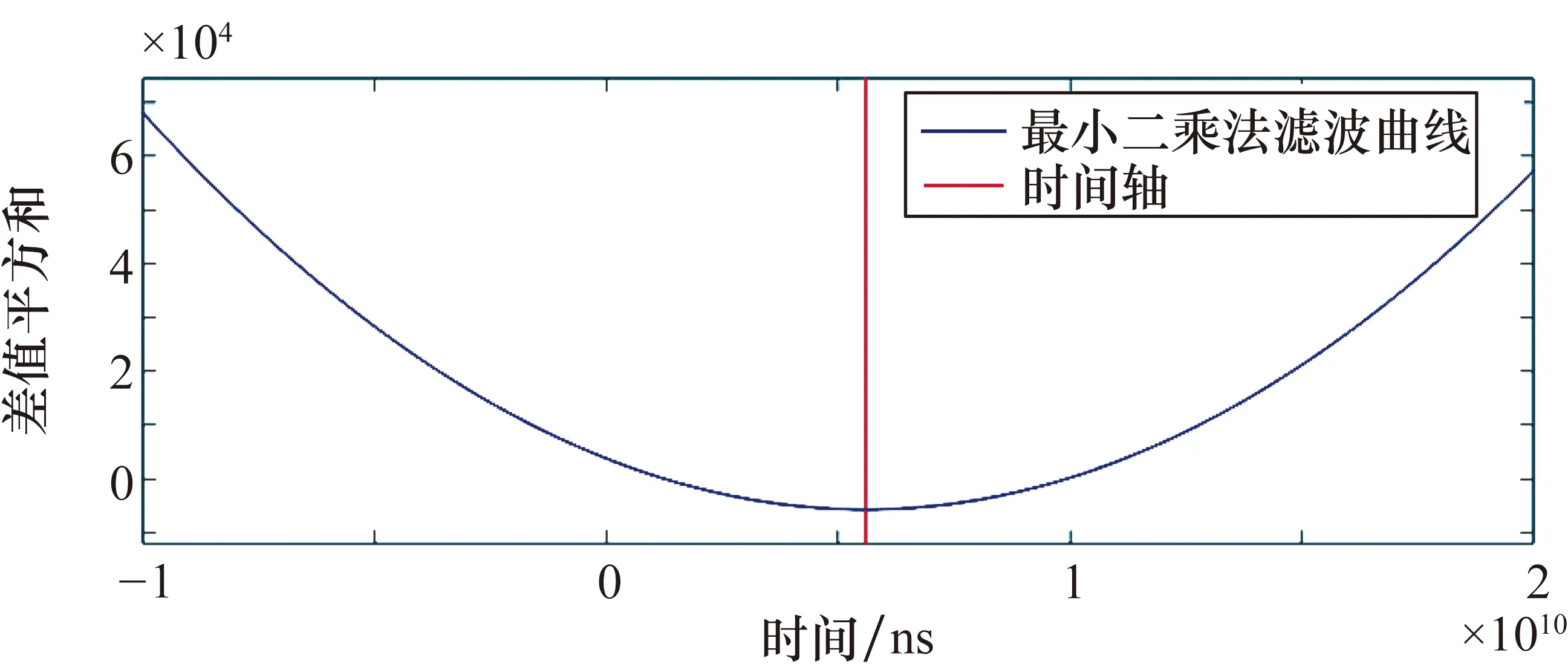
圖5 未進行延遲補償?shù)淖钚《朔V波曲線
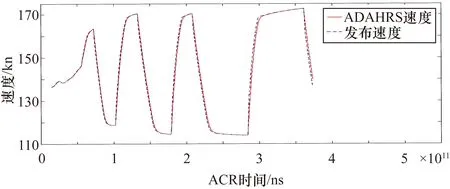
圖6 固定延遲時間的發(fā)布速度和AHRS速度曲線
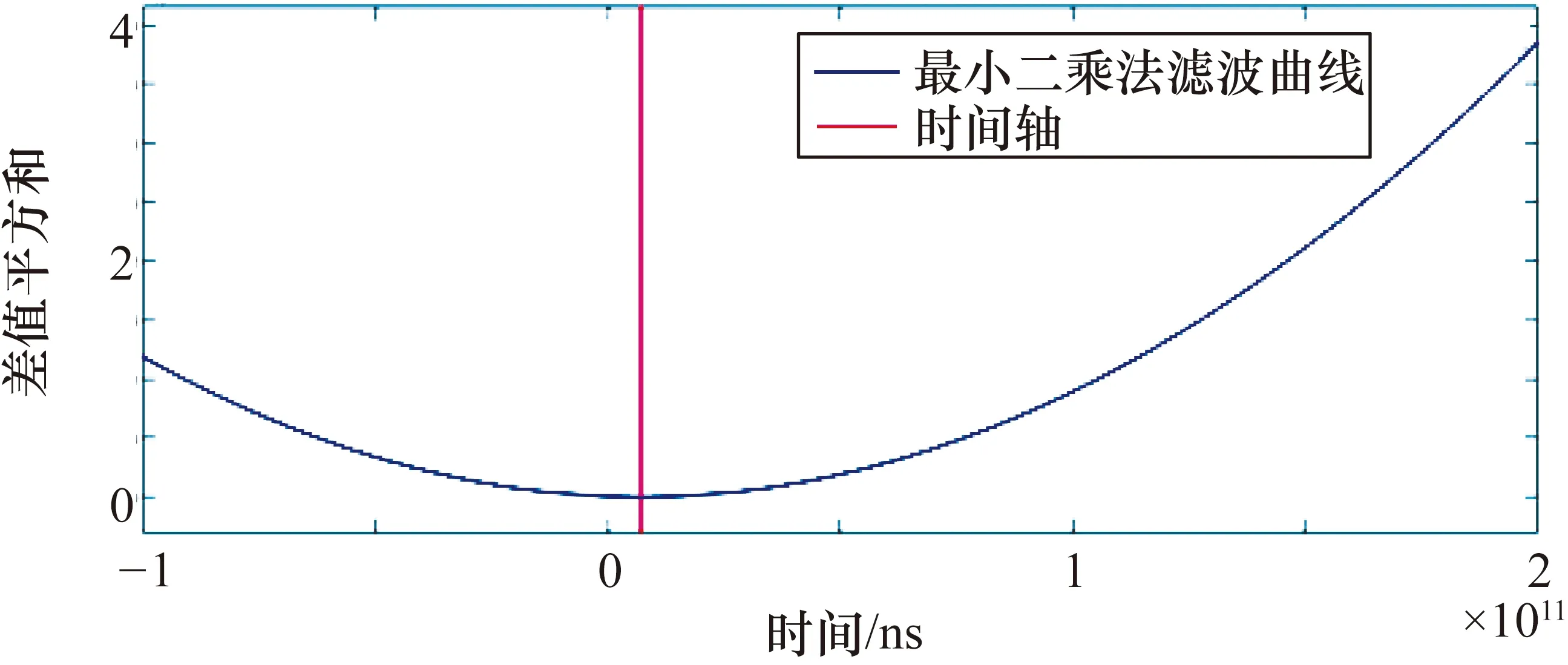
圖7 固定延遲時間的最小二乘法濾波曲線
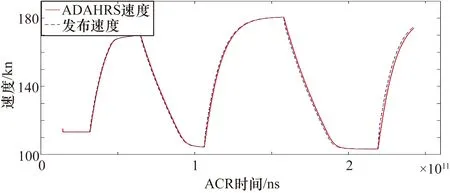
圖8 最優(yōu)時間延遲的發(fā)布速度和AHRS速度曲線
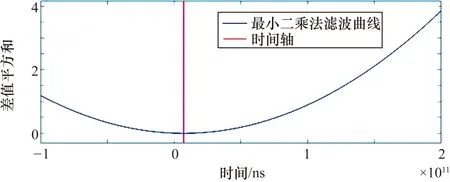
圖9 最優(yōu)時間延遲的最小二乘法濾波曲線
由圖4、圖6和圖8可以看出,發(fā)布速度(藍線表示)是系統(tǒng)給出的計算后的速度,在未進行時間延遲補償、固定時間延遲補償和最優(yōu)延遲時間補償3種方式測試中,其曲線始終滯后AHRS的速度曲線(紅線表示)。AHRS速度的獲取來自慣導(dǎo),近似為飛機實時速度,說明GPS延遲時間是客觀存在的。由圖5、圖7和圖9求出未進行時間延遲補償、固定時間延遲補償和最優(yōu)延遲時間補償3種方式測試中的延遲時間估算值(紅色中軸線)分別為5.590×109ns、1.695×109ns和1.115×109ns。由此可見不進行延遲時間補償和進行延遲時間補償?shù)男Ч苊黠@,延遲時間縮小了69.67%,而進行最優(yōu)時間延遲補償后,延遲時間在固定延遲時間補償?shù)幕A(chǔ)上又縮小了34.22%。說明給出的計算方法對通用航空集成航電系統(tǒng)的GPS延遲時間估算有效。
4 結(jié)束語
針對通用航空集成航電系統(tǒng)GPS延遲時間特點,研究了精確測量GPS信號延遲的方法,為通用航空集成航電系統(tǒng)ACR時間和GPS時間同步提供更多理論支撐和技術(shù)手段。提出延遲時間的幾種計算公式,根據(jù)可測量時間的不同,給出相應(yīng)計算公式的有效使用時機;對不可測量的部分,利用卡爾曼濾波進行最優(yōu)化估算處理;最終將可測量時間和最優(yōu)化處理后的未知時間相加,得出相對精確值;通過模擬仿真試驗證實了該方法的有效性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45