航空發動機整機振動故障智能診斷技術研究
2021-07-30 09:52:44鞏小強劉尚輝
測控技術 2021年7期
鞏小強, 劉尚輝, 李 沖
(西安飛機工業(集團)有限責任公司,陜西 西安 710089)
隨著科學技術的快速發展,航空發動機的推力、轉速、動強度等顯著提高,導致發動機零部件的振動載荷不斷增加,振動引起的故障顯著增多;此外,發動機結構日趨復雜且質量不斷減輕,其對安全性和可靠性的要求亦隨之增高[1]。因此,發動機振動狀態及振動特征的精準識別是判斷發動機有無故障的主要手段,且發動機安全性、有效性及使用壽命可獲得有效提高;同時,對于飛機適航性的增強、維修費的減少以及飛行事故的降低具有重要的工程意義。
近年來,大量研究者使用了BP神經網絡和支持向量機對航空發動機進行故障診斷,并達到了較好的診斷效果,但專注于整機振動故障診斷的相關研究極少。費成巍等[1]應用支持向量機進行整機振動故障診斷,實驗效果良好,診斷準確率較高;王志等[2]應用BP神經網絡構建了整機振動故障診斷模型,結果發現,該方法診斷較精準,且有效減少了虛警率。然而,由于BP神經網絡和支持向量機在局部極值、泛化能力、訓練樣本等方面存在著難以解決的問題[3],如BP神經網絡的訓練需要大量的樣本,且容易出現過學習和低泛化能力的現象,支持向量機雖是針對小樣本統計估計和預測的學習,但其僅能獲得局部最優解,導致其可擴展性較低且穩定性較差,故它們的使用范圍均存在一定的局限性[4]。因此,迫切需要引入一種當前機器學習領域的新方法。協同訓練算法的應用極具前景,它有效地解決了上述問題,同時使用該算法學習獲得的故障診斷模型具有強泛化能力,且對非線性數據的數學建模高效準確,因此在各個領域中得到了廣泛應用。
實際應用中,數據是由多種屬性特征所描述,并將其稱之為多視圖數據,故如何充分利用多視圖數據的信息進行有效學習是機器學習領域的研究熱點[5-7]。多視圖學習充分利用數據的多屬性特征,互傳信息,補充完善,更全面地反映目標數據的潛在特性,以獲得更好的分類性能,解決了單視圖學習精度低的問題。本文所使用的協同訓練算法是最為經典的一種多視圖學習算法。該算法可綜合利用目標數據的多視圖信息,在2個視圖上學習獲得2個不同的分類器,互換信息重新學習分類器,分類性能得到了顯著提高;其中,多視圖信息是指目標數據所具有的不同屬性,例如,在網頁分類問題中,網頁可由當前的網頁信息表示,亦可由指向網頁的超鏈接信息表示,從而形成了2種不同的視圖信息[5]。
Blum和Mitchell于1998年提出了協同訓練算法[8]。該算法的基本原理為:假設數據集χ包含2個不同視圖χ=χ1×χ2,且其相應的屬性劃分結果分別為子集X1、X2;其中,視圖χ1、χ2必須滿足2個條件:① 每個屬性子集都足夠訓練一個高性能分類器;② 在給定類標簽的情況下,屬性子集之間相互獨立分布,即:給定樣本x=(x1,x2)∈χ1×χ2,其標簽y∈Y,Y為標簽集,則存在:p(x1|y)p(x2||y)=p(x1,x2|y)。
每個屬性子集構成一個“視圖”,滿足以上條件的視圖稱之為“充分冗余視圖”[9]。該算法首先基于2個視圖上的標記數據集學習獲得2個初始分類器,然后,分類器對無標記樣本進行標簽預測,選擇出置信度較高的樣本及其預測標簽,并將其添加到另一個分類器對應的標記數據集中,形成其新的標記數據集,進而基于此更新2個分類器,重復執行以上過程,直至算法達到收斂效果[10];其中,置信度是指正確標記樣本數據的可靠性。具體算法流程如下。

輸出:分類器h=(h1,h2)。
具體步驟:
① 利用L中的標記樣本訓練分類器h1,h2;
② 分類器h1,h2分別對無標記數據U進行預測標記;
③ 選擇置信度較高的預測樣本,并添加到另一個分類器對應的標記數據集;
④ 利用更新的訓練樣本集X=L′∪U′,重新訓練分類器;
⑤ 重復上述過程,直至收斂。

本文提出了一種基于多類協同訓練的整機振動故障診斷方法,實現了對發動機故障的精準診斷,降低了因故障而造成的各種損失,如飛行事故的降低、飛機維修費的減少等,故其在航空飛行試驗中具有重要的工程意義。
1 整機振動故障診斷模型
BP神經網絡和支持向量機僅適用于二分類問題,而航空發動機整機振動故障診斷研究屬于多分類問題,同時針對某型發動機,振動故障數據有限,故利用協同訓練算法可對少量數據進行有效建模的特點,構建發動機整機振動故障診斷模型。
1.1 整機振動故障診斷模型學習
本文將整機振動故障類別表示為標記空間y={0,1,2,3},其中,“0”表示“無故障”,“1”表示“轉子不對中”,“2”表示“動不平衡”,“3”表示“支承剛度過大”。整機振動故障分類器使用矩陣形式表示,即:ε=[ε0,ε1,ε2,ε3],θ=[θ0,θ1,θ2,θ3],且ε,θ∈Rd×4,其中,ε,θ表示2種不同性質的分類器,d為不同的“振動速度”數,即在不同位置不同方向上的振動速度。
1.1.1 損失函數構造
使用邏輯回歸算法構造2個分類器的損失函數,如式(1)、式(2)所示。
(1)
(2)
式中,(x,y)表示故障數據x對應故障類別y;L表示帶標記的整機振動故障數據集。
最小化2個分類器上的損失函數,如式(3)所示。

(3)
由于式(3)不可微,故使用歸一化操作將其最大項消除,如式(4)所示。
(4)
1.1.2 屬性劃分
為了提高2個分類器之間的差異性,保證該算法的高分類性能,對帶標記的整機振動故障數據集L所包含的“振動速度”屬性進行劃分,具體如式(5)所示。
(5)
式中,εi,θi分別表示2個分類器在屬性i上的取值,即:“1”或“0”,“1”表示分類器包含該屬性,“0”則相反。
1.1.3 最優化問題轉化
為了學習2個具有較低損失值的故障分類器,結合式(4)、式(5),將其轉化為帶約束的最優化問題,具體如式(6)、式(7)所示。
目標函數:
(6)
約束條件:
(7)
本文應用增廣拉格朗日方法[10]進行該最優化問題的求解。
1.2 整機振動故障數據的類別預測
使用已生成的2個故障分類器ε、θ分別預測整機振動故障數據x′∈U的故障模式,其中,U表示未帶標記的整機振動故障數據集,具體如式(8)、式(9)所示。
(8)
(9)
式中,k=0,1,2,3分別代表4種故障模式,即:“無故障”、“轉子不對中”、“動不平衡”和“支承剛度過大”;yε(x′),yθ(x′)分別為x′在分類器ε,θ上的類別預測結果;x′Tεk表示x′在分類器ε上的故障類別為“k”的概率;x′Tθk表示x′在分類器θ上的故障類別為“k”的概率。
1.3 整機振動故障分類器優化
為了提高分類器的診斷準確率,迭代優化已生成的2個故障分類器ε,θ。本文對整機振動故障數據x′的診斷可靠性進行量化評估,如式(10)、式(11)所示。
(10)
(11)

(12)

(13)

診斷可靠性評估完成之后,在2個分類器之間互傳帶標記的整機振動故障數據,即:基于預測可靠性大小降序排列未帶標記的整機振動故障數據,選取每個分類器預測獲得的前5組整機振動故障數據添加至另一個分類器對應的標記數據集,以此更新帶標記的整機振動故障數據集,并基于更新后的標記數據重新訓練故障分類器ε、θ,重復上述過程,直至未帶標記的整機振動故障數據集為空或無可靠數據選擇,以此迭代優化分類器。
1.4 仿真識別
本文基于多數投票機制識別其故障診斷結果,其計算如式(14)所示。
y(x′)=argmax{yε(x′),yθ(x′)}
(14)
2 實驗
2.1 參數設置
本文選取某型航空發動機5種常見截面的水平與垂直方向作為試驗測點,即為故障診斷模型學習所需的分類屬性,以及4種常見的發動機故障模式(無故障、轉子不對中、動不平衡、支承剛度過大)作為分類標簽。在每種故障模式中選取5個特征向量,總計20個特征向量。本文隨機選取每種模式中的2個特征向量作為訓練數據,用于構建多類協同訓練故障診斷模型,如表1所示(注:此數據均來源于沈陽航空工業學院遼寧省數字化工藝仿真與試驗技術重點實驗室);同時選取每種模式中剩余的3個特征向量作為測試數據,以此驗證診斷模型的分類性能。
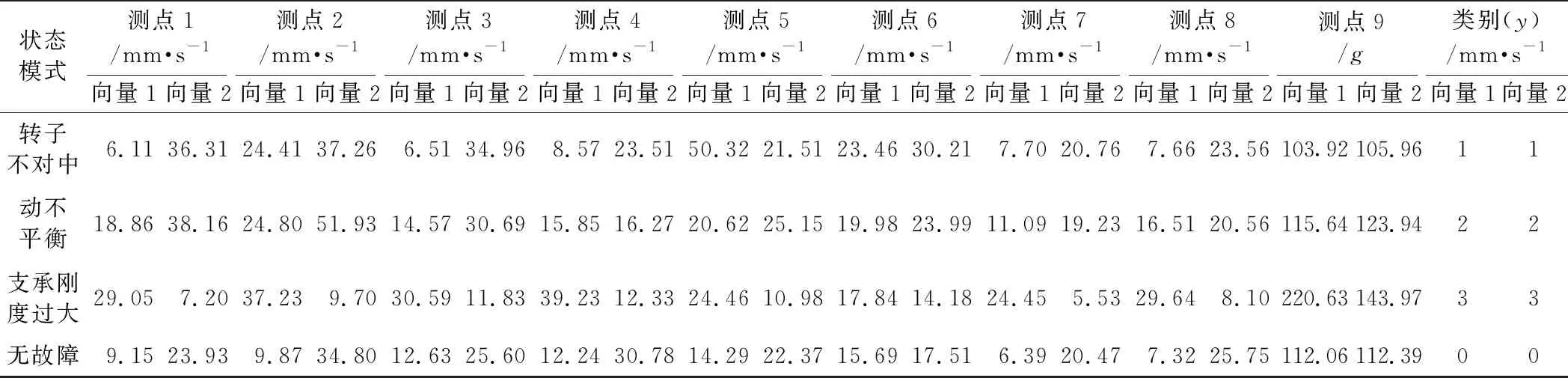
表1 某型航空發動機整機振動故障診斷訓練數據[1]
2.2 模型訓練和測試
基于表1所包含的8個特征向量進行故障診斷模型的訓練,同時利用該數據對該模型進行仿真測試,分類準確率達到100%,實現了故障數據的精準分類。
此外,為了驗證該模型在噪聲條件下的模式識別能力,在輸入數據上疊加一定的噪聲信號,該模型診斷結果如表2所示,診斷準確率達100%。由此表明,存在噪聲信號的干擾下,該模型仍具有高分類性能。
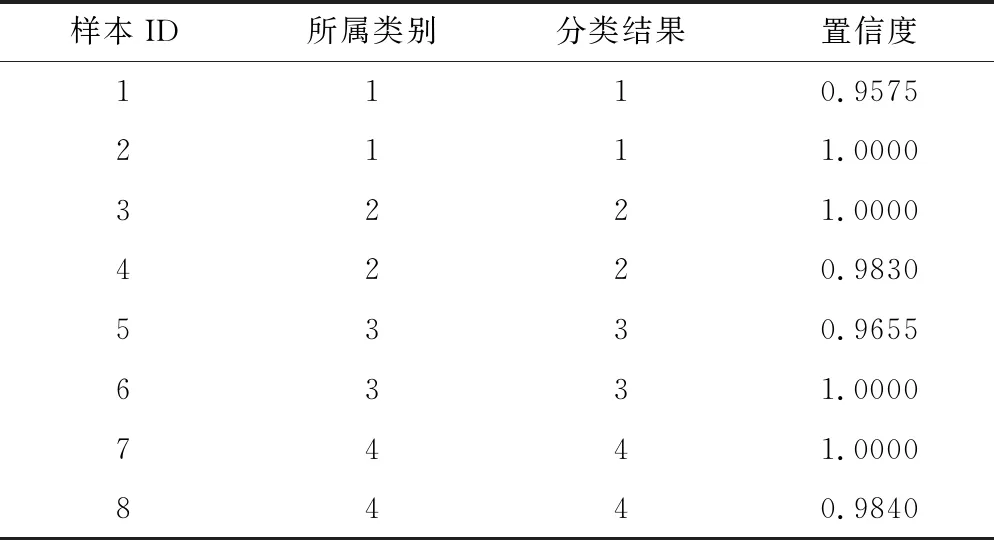
表2 噪聲干擾下的診斷結果
2.3 對比算法
為了評估多類協同訓練算法在不同發動機故障類型上的泛化能力,本文選取分類準確率(Accuracy)作為其評估指標,并采用BP神經網絡、支持向量機(Support Vector Machine, SVM)與該算法診斷結果進行對比;其中,分類準確率越高,算法的泛化能力則越強。本文使用表1所包含的8組訓練數據進行整機振動故障診斷,實驗結果如表3所示。結果發現,多類協同訓練算法在4種故障類型上的分類準確率均為100%,均高于BP神經網絡和SVM,且BP神經網絡的分類準確率達到最低(82%)。由此可得,多類協同訓練算法在整機振動故障診斷上具有最強泛化能力。在表3中,多類協同訓練算法用MCT表示。

表3 多類協同訓練算法、SVM、BP在不同故障類型上的分類準確率
2.4 仿真識別
為了進一步驗證多類協同訓練算法的有效性,本文將其余12組測試數據輸入至整機振動故障診斷模型,“轉子不對中”、“動不平衡”、“支承剛度過大”及“無故障”等4類數據的診斷結果如表4所示。結果發現,4種故障類型的模型預測結果均與實際結果一致,這表明該模型的學習能力和泛化能力均為良好。

表4 4類數據的故障診斷結果
3 結論
相比于BP神經網絡、支持向量機,協同訓練算法的最大優點為它能在少量帶標記數據的條件下,實現對未標記數據或實例數據的精準分類。本文對于航空發動機整機振動故障的仿真識別,利用少量的4組訓練數據實現了4種故障模式的精準識別,且故障診斷模型具有較強的泛化能力以及噪聲條件下的容錯能力。由此證明,針對某型號飛機,因其發動機很少發生重大故障,故難以獲得大量的訓練數據,同時在真實場景下的整機振動數據中均存在相應強度的噪聲干擾,使用多類協同訓練算法對整機振動故障進行模式識別,具有非常重要的工程實用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
數學物理學報(2017年6期)2018-01-22 02:26:40
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
計算物理(2014年2期)2014-03-11 17:01:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21