一種基于神經網絡的空空導彈傳感器在線故障診斷技術研究
2021-07-30 02:56:48花文華張金鵬
彈箭與制導學報 2021年3期
李 偉,花文華,張金鵬,2
(1 中國空空導彈研究院,河南洛陽 471009;2 航空制導武器航空科技重點實驗室,河南洛陽 471009)
0 引言
導彈的飛行控制系統主要用以完成制導導引、穩定控制等功能,需要由慣性傳感器敏感當前導彈的飛行狀態參數。但是慣性傳感器在導彈貯存期間,隨著時間推移會發生參數漂移,在飛行過程中也可能發生性能故障或異常。這些故障或異常將導致慣性傳感器敏感到的導彈飛行參數與實際存在較大偏差,飛行控制系統由此產生的執行器控制量也會偏離真實情況,導致任務失敗。因此慣性傳感器能否將當前導彈飛行狀態準確傳遞給飛行控制系統將對導彈可靠性產生重大影響。
為提高導彈的可靠性,有必要設計一種故障診斷器對慣性傳感器進行在線故障診斷,并對故障信號進行重構。目前,故障診斷方法主要有基于解析模型的方法、基于信號處理的方法和基于知識的方法,具體到傳感器故障診斷器及狀態觀測器的建立方法主要有濾波器[1]、小波分析[2]、專家系統[3]、滑模控制[4]等。文中提出了一種基于神經網絡[5]的在線系統狀態觀測器,能夠準確高效的對導彈慣性傳感器敏感信號進行跟蹤、診斷并實現信號準確估計。
1 故障診斷器設計
文中搭建的故障診斷器結構示意圖如圖1所示。
圖1 故障診斷器結構示意圖
首先基于導彈氣動模型建立導彈狀態觀測器,在線估計導彈的飛行狀態參數。其次搭建BP神經網絡,通過學習訓練導彈的實際飛行數據建立輸入輸出映射,通過該映射可在線估計導彈傳感器的預期輸出,將該預期估計值與傳感器的實際輸出值進行比較,并進行相應的邏輯判斷,即可得到導彈傳感器的故障診斷結果。若判斷傳感器故障,則可將BP神經網絡輸出的預期估計值代替傳感器實際輸出,傳遞至導彈的飛控系統中,用于執行制導、穩定等功能。
導彈飛行速度表示為:
(1)
式中:m為導彈質量;P為發送機推力;X為氣動阻力;G為重力。
在BP神經網絡故障診斷器設計中,考慮到導彈氣動特性,加速度傳感器的輸出值與導彈姿態、飛行速度、發動機推力與導彈所處海拔高度有關,因此設置9個BP神經網絡輸入層節點,分別為導彈姿態(四元數R0,R1,R2,R3)、導彈飛行速度(VX,VY,VZ)、發動機推力(P)與導彈海拔高度(H)。BP神經網絡隱含層設置為1層,隱含層節點數依照Kolmogorov經驗公式設置為17個。輸出層節點數設置為3個,分別為X,Y,Z三通道加速度傳感器輸出值。
在BP神經網絡故障診斷器設計完成后,利用實際的彈道數據對故障診斷器進行訓練。采用典型彈道數據進行訓練,網絡的初始權值取[-1,1]之間的隨機值,網絡學習速率設置為0.9,訓練誤差設置為0.001,訓練次數為100次。在訓練過程中節點權值經過大量訓練而逐漸穩定,訓練的迭代次數也不斷減少,直至訓練成功。在神經網絡訓練成功后,保存已訓練好的網絡各節點權值,故障診斷器即搭建成功,可進入后續工作階段。
2 仿真試驗
在故障診斷器搭建后,將設計好的故障診斷器嵌入導彈飛行控制軟件中,通過模擬慣性傳感器故障的數字仿真試驗來驗證其有效性。慣性傳感器故障一般有恒輸出、恒偏差和恒增益等故障模式,其數學描述為:
1)恒輸出:
yo=C
(2)
2)恒偏差:
yo=yi+C
(3)
3)恒增益:
yo=k·yi
(4)
式中:C為常數;yi為原始輸入;k為增益系數。采用Matlab搭建數字仿真平臺,利用蒙特卡洛統計試驗法進行仿真試驗。仿真試驗的彈道設計條件為:導航坐標系采用慣性系,導彈發射時海拔高度為3 km,初速為X向和Y向0 m/s,Z向260 m/s,目標海拔高度為4 km,速度為X向Y向0 m/s,Z向100 m/s,彈目相對距離X向為6 km,Y向為1 km,Z向為44 km。在數字仿真環境中模擬慣性傳感器故障,在給定的彈道曲線下,仿真計算導彈姿態、速度、位置,仿真結果如圖2所示。
圖2 Z向加速度計故障輸出
如圖2所示,均在Z向加速度計進行故障注入,時間均在發射后20~30 s,具體的注入形式及仿真結果如表1所示。
表1 故障形式及仿真結果
注入故障后的X,Y,Z方向的彈目相對距離如圖3所示。
圖3 故障注入后仿真結果
試驗結果顯示導彈脫靶量過大,未能命中目標,Z向加速度計的這幾種故障模式對空空導彈造成的結果是不可逆的,僅憑原來的制導回路無法克服,會導致導彈任務不能完成。將文中設計的故障診斷器接入導彈制導回路中,重新按照故障條件進行仿真試驗,結果如圖4、圖5所示。

圖4 Z向加速度計故障數據和估計數據
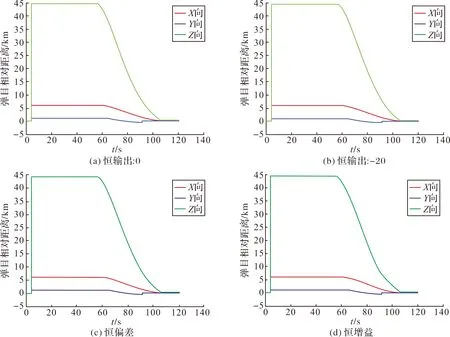
圖5 接入故障診斷器后仿真結果
如圖5所示,所設計的故障診斷器準確判斷出Z向加速度計故障發生,并對Z向加速度計的輸出進行了準確的估計,用于導彈的導航制導。導彈在使用故障診斷器估計的Z向加速度計輸出后,仍能命中目標,完成飛行任務。
3 結論及展望
提出的基于神經網絡的導彈傳感器在線故障診斷技術方案有效。為了探索故障診斷技術,設計的故障診斷器目前僅針對加速度傳感器通道,下一步將進一步對角速度傳感器通道等進行故障診斷設計。并且,目前故障診斷器訓練數據僅為空空導彈的一般彈道,后續工作將考慮針對一些極限工作條件設計單獨的故障診斷分支以滿足空空導彈的全工況適應性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
