直升機載空地導彈俯仰姿態方案通用設計方法
2021-07-30 03:27:10王妮芝
彈箭與制導學報 2021年3期
關鍵詞:設計
馬 菲,楊 凱,許 琛,何 軼,王妮芝
(西安現代控制技術研究所,西安 710065)
0 引言
直升機載空地導彈是從直升機上發射的攻擊地面目標的導彈,是武裝直升機的主要進攻武器,可執行近距離空中支援、戰場空中遮斷、壓制防空作戰、攻擊敵方縱深地域有價值目標等作戰任務[1]。
直升機載空地導彈發射離軌至命中目標,彈道可以分為初始段、中制導段與末制導段。其中初始段主要作用是穩定導彈彈體姿態;中制導段的主要作用是控制導彈彈體位置和姿態,控制導彈沿彈目瞄準線定高飛行,確保導引頭捕獲目標;末制導段的主要作用是控制導彈按設計的比例導引律飛行,實現對目標的精確打擊[2]。
彈道初始段俯仰通道一般采用姿態控制,其主要作用是穩定彈體姿態,抑制系統擾動,控制導彈按期望的姿態方案飛行,并在初制導段與中制導段交接過程中滿足彈體姿態和導彈位置的平穩過渡[3]。
文中提出了一種適應直升機載平臺大發射高度范圍的空地導彈俯仰姿態方案通用設計方法,可以簡化初制導段方案爬升控制數表設計的復雜程度,解決傳統俯仰姿態多數表設計方案不能很好適應直升機載平臺下發射包絡的技術難題。
1 傳統俯仰姿態方案設計方法
傳統的直升機載空地導彈俯仰姿態方案一般根據不同發射高度及中制導啟控方案分段設計,形成多組控制數表,并根據不同的發射高度在多組數表的不同分段區間內進行插值及參數補償[4]。由于導彈的發射高度在一定區間變化,如果控制數表數量過少,導致在不同發射高度下初制導方案爬升段彈道一致性較差,甚至出現彈道不滿足總體設計要求和作戰使用要求的現象,而增加控制數表數量會增大俯仰姿態方案設計的復雜程度。因此傳統的直升機載空地導彈俯仰姿態方案設計一般最少存在5組以上的控制數表,對彈載計算機的存儲容量及讀取數表速度有一定的要求,不利于工程實現,同時對直升機載平臺的發射包絡有一定的限制,不利于作戰使用[5]。
2 新型俯仰姿態方案通用設計方法
直升機載空地導彈俯仰姿態方案的設計主要考慮導彈發射高度包絡、初始彈目相對關系、中制導彈道規律啟控點要求,同時考慮導彈的飛行姿態、攻角的穩定性以及初制導段與中制導段導彈姿態、彈道的平穩銜接,并結合地形、發動機點火時間等作戰因素[6]。
針對導彈發射高度包絡及中制導彈道規律啟控點需求,俯仰姿態方案通用設計方法,根據導彈發射高度、初始彈目相對關系、導彈初始俯仰角及中制導彈道規律啟控點需求等,通過設計一組控制數表和插值方案即可適應不同發射高度的導彈俯仰姿態爬升,實現姿態角從射角到中制導段平飛角度的平穩過渡,實現導彈初始段方案爬升和中制導段彈道高度的平穩銜接[7]。
2.1 中制導彈道規律啟控點預設高度設計
中制導段彈道方案一般根據導彈中制導段高度控制啟控時刻導彈高度和中末交接段導彈高度約束條件規劃某種彈道方案,導彈按照此預設的彈道規律飛行。中制導彈道規律啟控點預設高度設計需要考慮中制導彈道規律及中制導啟控點處導彈姿態角和彈道的銜接等問題[8]。
根據中末交接段導彈預設高度H0與載機發射高度yzj的關系,設計中制導彈道規律啟控點預設高度H1。當發射高度小于中末交接段導彈預設高度H0時,將中制導彈道規律啟控點預設高度H1設定為H0;當發射高度大于等于中末交接段導彈預設高度H0時,將中制導彈道規律啟控點預設高度H1設定為載機發射高度yzj,即:
(1)
2.2 俯仰姿態方案基準控制數表和修正控制數表設計
俯仰姿態方案通用設計方法的一項重要內容就是設計一組控制數表,包括基準控制數表和修正控制數表。其中基準控制數表保證導彈爬升到基準高度,修正控制數表是在基準控制數表上的一個相對修正值,讓導彈在基準高度上再爬升一個相對高度。
2.2.1 基準控制數表的設計方案
首先,根據導彈瞬時受力平衡和力矩平衡原理,設計平衡重力的方案爬升段姿態控制信號?g,計算公式為:

(2)

其次,根據需要的基準爬升方案設計彈道傾角規律,作為方案爬升段姿態控制信號θ*,θ*為時間的分段線性函數。


(3)
2.2.2 修正控制數表的設計方案

2.3 任意海拔高度下的控制數表組
利用上述方法分別設計0 m海拔高度下的控制數表組f1(x)和6 000 m海拔高度下的控制數表組f2(x)。任意海拔高度下的控制數表組可根據實際作戰海拔高度在兩組控制數表組之間插值得到:
(4)
其中yhb為本機海拔高度。
2.4 任意海拔高度下不同彈道模式的俯仰姿態方案信號
利用已設計得到任意海拔高度下的基準控制數表和修正控制數表,根據不同的發射高度在修正控制數表上進行插值修正,疊加到基準控制數表上,形成俯仰姿態方案信號,即可適應不同發射高度的彈道方案需求,保證導彈進入中制導時,導彈縱向位置在設定的中制導彈道規律啟控點預設高度H1附近。
根據導彈發射高度yzj、中制導彈道規律啟控點預設高度H1與基準控制數表使導彈爬升的高度的偏差,設計修正控制數表的比例系數Ky,工程應用中一般設計Ky是yzj的分段線性函數。
(5)
(6)

3 俯仰姿態方案通用設計方法數學仿真
3.1 設計算法舉例
以某型直升機載空地導彈為例,驗證俯仰姿態方案通用設計方法。
3.1.1 基準控制數表設計
首先,按照式(2)設計平衡重力的方案爬升段姿態控制信號?g;其次,根據需要的爬升方案設計彈道傾角規律,作為方案爬升段姿態控制信號θ*。爬升方案設計彈道傾角規律θ*為時間的分段線性函數,特征點值為:


3.1.2 修正控制數表設計

3.1.3 發射高度修正系數設計
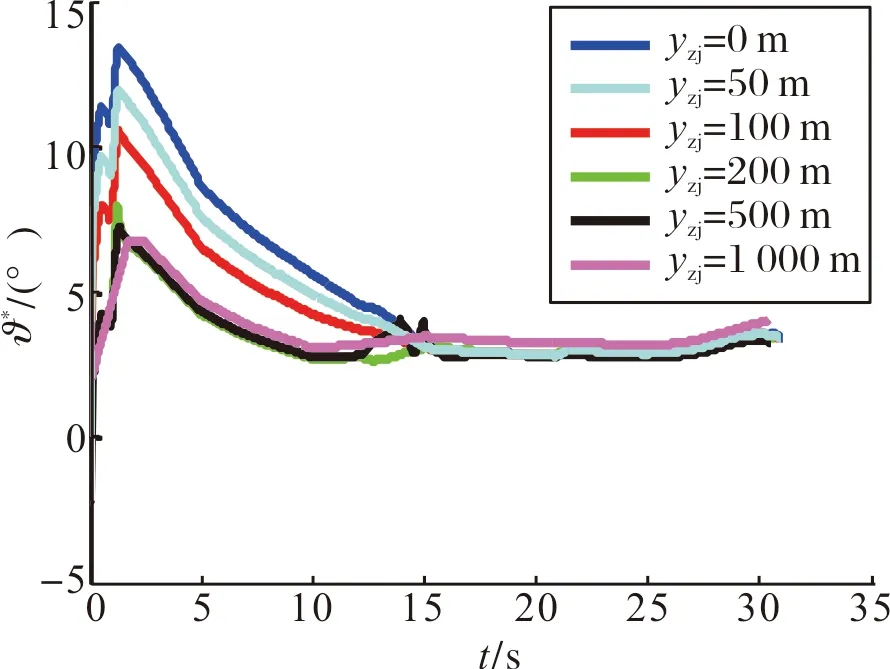
根據不同發射高度yzj和中末交接段導彈預設高度H0,確定中制導彈道規律啟控點預設高度H1,進而確定發射高度修正系數Ky。當yzj 以中末交接段導彈預設高度H0=200 m為例,設計發射高度yzj在0 m,100 m,200 m,300 m,500 m,1 000 m處的發射高度修正系數Ky,其他發射高度下的修正系數可通過特征點插值得到。 Ky是yzj的分段線性函數,特征點值為: yzj0=[0,100,200,300,500,1000]; Ky0=[2.4,1.6,0.8,-1.0,-1.0,-1.0]。 以某型直升機載空地導彈為例,通過數學仿真驗證俯仰姿態方案通用設計方法的有效性。圖1為不同發射高度下導彈俯仰姿態方案信號,圖2為在此俯仰姿態方案信號下的導彈縱向彈道。可見,在直升機載空地導彈不同發射高度下,此俯仰姿態方案通用設計方法可以使得導彈在中制導開啟時刻到達中制導彈道規律啟控點預設高度附近。 圖1 不同發射高度導彈俯仰姿態方案信號 圖2 不同發射高度導彈縱向彈道 在常規空地導彈俯仰姿態方案設計思路和方法的基礎上,提出了一種俯仰姿態方案通用設計方法,可滿足不同發射高度、不同中制導段啟控點彈道高度的要求,其突出優點是根據初始發射條件,完成姿態方案信號的智能規劃設計,既有利于初始段的姿態穩定,又能實現姿態控制與高度控制平穩過渡。此方法簡化初制導段方案爬升控制數表設計的復雜程度,解決了傳統俯仰姿態多數表設計方案不能很好適應直升機載平臺下發射包絡的技術難題,可應用于不同發射高度的直升機載空地導彈的俯仰姿態方案領域,具有較大的推廣應用空間。3.2 數學仿真

4 結論
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
