基于內腔光阱的光力加速度測量方法
2021-07-29 05:18:22劉子捷鄺騰芳馮海寧肖光宗
導航定位與授時 2021年4期
關鍵詞:測量
劉子捷,熊 威,鄺騰芳,馮海寧,肖光宗,羅 暉
(國防科學技術大學前沿交叉學科學院,長沙 410072)
0 引言
自誕生以來,基于光阱懸浮微粒的精密測量技術已在生物學和納米科學等領域廣泛應用[1-2]。與傳統的精密測量方法相比,利用光阱進行測量的主要優勢在于被捕獲微粒不與外界接觸,在較高真空度的情況下,可以消除一般力學傳感器中的熱噪聲[3]。得益于這一特點,懸浮光力學成為過去10年間的熱門研究方向,對懸浮微粒的力測量精度有望接近量子極限[4]。
2008年,美國麻省理工學院的D. L. Butts等首次提出了利用光阱技術進行加速度傳感,通過在真空中捕獲微粒,結合反饋冷卻增大微粒在真空中的穩定性等手段,實現對沿光束軸向1g重力的測量,初步實驗達到了119μg/Hz1/2的加速度測量精度[5]。2010年,該小組利用雙光束光阱捕獲微粒,提出了一種對微粒形狀不敏感的探測方法,簡化了實驗系統的機械結構,降低了系統噪聲,在一定程度上提升了光力加速度計的分辨率和零偏穩定性[6]。2018年,耶魯大學的Monteiro等設計了一種基于單光束光鑷的加速度測量裝置。以質量為0.1~30ng的SiO2微粒作為探針進行加速度傳感,發現適當增加微粒大小能夠提高加速度傳感的靈敏度。對質量為12ng的SiO2微粒進行測量,對信號長時間平均后加速度測量精度可以達到nano-g量級[7]。
在國內,浙江大學基于光纖光阱設計了多種結構的光力加速度計[8-9],并對提高加速度計測量靈敏度的方法進行了理論分析和實驗研究[10]。北京航空航天大學利用射線模型分析了光力加速度計的理論精度[11]。
微粒的精密位置探測是這些加速度測量方案中的核心技術[12]。傳統的光鑷系統中大多使用視頻追蹤和后焦面干涉測量等方法來測量微球位移[13-14]。在這些方法中,基于圖像或微粒散射的位置測量模塊往往需要較復雜的光路結構。
2019年,土耳其畢爾肯大學的G.Volpe首次提出在激光諧振腔內捕獲微粒的光阱結構,稱之為內腔光阱[15]。在內腔光阱中,通過微粒的位置調節腔內功率,為微粒的穩定提供自反饋[16]。在加速度測量時,內腔光阱的自反饋特性可以通過單個光電探測器獲得微粒的位置信息,一方面簡化了位置測量結構;另一方面大幅提升了加速度測量的響應速度。
本文的主要內容是利用內腔光阱的自反饋現象進行加速度測量。通過理論分析,確立了光功率與微粒加速度的關系曲線,并討論了其非線性效應。通過外加激光的方式,討論了工作點選取對加速度測量靈敏度的影響,并選出了合適的工作點。
1 實驗系統
使用內腔光阱測量加速度的原理圖如圖1所示。這是一個內含光阱的環形激光器,以980nm激光(Thorlabs, CLD1015)為泵浦源,摻雜光纖為增益介質產生1030nm的激光,光纖中的激光通過準直器后變為光斑直徑為3.5mm的空間光,射入2個數值孔徑(Numerical Aperture,NA)為0.25的聚焦物鏡Ob1和Ob2(Thorlabs, LMH-10X-1064)后產生光腰大小為6μm的聚焦光,聚焦光在空氣環境中對半徑為5μm的聚苯乙烯微粒產生光力作用,光力與重力共同作用捕獲微粒[15]。通過隔離器使得光阱中只存在豎直向上方向的激光,讓光力和重力共同作用維持微粒的穩定。光電探測器(Thorlabs, RXM10AF)探測99∶1耦合器輸出的1%腔內光強,獲得腔內的功率變化,進而求出系統的加速度。探測器輸出的電信號可以通過功率計進行標定,從而直接輸出激光功率,其最大測量帶寬可以達到10GHz。在x軸方向加入了671nm的激光(長春新產業,MRL-FN-671nm),可以令微粒的平衡位置沿x軸平移,以選擇合適的工作位置。
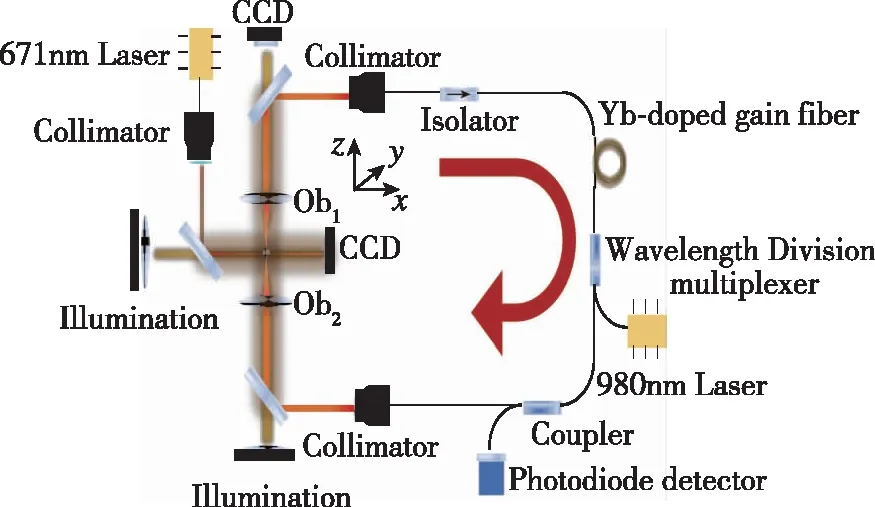
圖1 內腔光阱測加速度原理圖(紅色箭頭代表內腔光阱中激光傳輸方向)Fig.1 Schematic diagram of the acceleration measurement in intracavity optical trap (the red arrow represents the laser propagation direction in the intracavity optical trap)
在內腔光阱中,微粒在不同位置對激光的散射不同,散射的光越多,諧振腔的損耗越大,因此微粒位置的改變會調節諧振腔的損耗,從而影響腔內功率的大小。當腔內未捕獲微粒時,腔內損耗低,激發效率高,腔內功率大;當捕獲微粒時,腔內損耗大幅上升,激發效率低,腔內功率下降。同理,微粒的位置也會調節損耗,所以腔內功率可以反映微粒的位置變化信息。由于以上原因,內腔光阱中微粒的位置與腔內功率的耦合關系非常適用于高精度位置探測,這就是利用內腔光阱進行加速度測量的主要機理。
2 基本原理
2.1 數學推導
微粒在腔內所受光力與微粒到平衡位置的距離和腔內功率有關,其公式近似于彈簧振子的受力公式
F=k(r)r
(1)
其中,k(r)=κpP,κp是由實驗環境和微粒的光學參數決定的常數。在一般的光阱中,腔內功率P是一個常數,但是在內腔光阱中,微粒的位置會對腔內功率進行調節。G.Volpe給出了一個非線性反饋的公式如下[11]
(2)
其中,r是微粒的徑向位移;rL是內腔光阱高散射區域邊界。當微粒位于該區域內時,如圖2(c)所示,微粒將所有激光散射,此時腔內功率為0,圖2(a)中功率為0的區域即為高散射區域,其長度為2rL。當外界存在加速度時,微粒會偏離平衡位置,與光力達到新的平衡。根據牛頓第二定律F=ma,結合式(1)和式(2)可得
ma=κpP(r)r
(3)
由式(3)進行數學推導,可以得到外界加速度a與腔內功率的關系式
(4)
其中,m是微粒的質量。當腔內功率非常微弱,P(r)比P0小1個數量級時,加速度與腔內功率成正比,此時
(5)
由式(4)和式(5)可知,腔內功率對于外界加速度的變化敏感,特別是當外界加速度微弱時,兩者之間的非線性效應減弱,可近似視為成正比。為了便于分析,本文僅討論沿x方向的加速度。
2.2 光力計算
微粒的光力分布可以反映加速度測量曲線,根據實驗經驗選取參數,以rL=0.5μm,P0=3.4mW,κp=4.5×10-4(N·m)/W對微粒在沿x軸方向的光力分布進行仿真,如圖2所示。

(a)腔內功率的徑向分布
圖2(a)和圖2(b)所示分別為環形腔出射光功率以及微粒受到的光力與微粒沿x方向的位置關系。當x=0時,微粒質心位于光軸上。光阱中心附近存在一段較小的高散射區域,該區域內微粒幾乎將所有光線全部遮擋,激光器輸出功率為0,微粒受到沿x方向的光力為0,如圖2(c)所示。當微粒遠離高散射區域達到圖2(d)所示狀態時,隨著微粒位移的增大,腔內損耗逐漸降低,光功率逐漸增大,而光力出現先增大后減小的現象。當微粒完全脫離高斯光束照射范圍時,腔內損耗達到最小值,激光功率最大,同時微粒已經脫離光阱區域,受到的光阱力為0,如圖2(e)所示。
3 結果與討論
3.1 加速度測量曲線
在本實驗中,主要思路是利用微粒位置與腔內功率的對應耦合關系測量加速度。結合式(5)與圖2仿真了腔內功率和加速度的關系曲線,如圖3所示。

圖3 加速度與光功率的關系曲線(小圖是平衡位置附近的關系曲線)Fig.3 Relation curve between acceleration and optical power(the small graph is the relation curve near the equilibrium position)
分析圖3,若工作點選在高散射區內(腔內功率為0),系統受到沿x軸的加速度時,不管沿正向還是反向都會使腔內功率變大,無法分辨加速度的方向。因此,用波長為671nm的激光將微粒推離高散射區域(見圖1)。通過控制671nm激光束使加速度測量的工作點平移到圖3中平衡位置,當加速度沿x軸正向時,功率上升,反之則功率下降,即可以判斷加速度的方向。
3.2 靈敏度
如圖3所示,在不同初始工作功率下的加速度斜率K(P)=da/dP,代表每1mW功率變化反映的加速度變化量。其倒數是系統的靈敏度,即單位加速度變化引起的系統功率變化,S=1/K(P),單位為mW/g。根據本文給出的實驗參數,仿真分析了靈敏度S與不同初始功率的關系,如圖4所示。

圖4 不同微粒半徑下,微粒初始功率與對應位置的靈敏度關系曲線Fig.4 Sensitivity curve between the initial power and the corresponding position with different particle radius
觀察圖4中微粒半徑為5μm的曲線,當內腔光阱中的初始功率為0時,加速度計的測量靈敏度最高可以達到50.2mW/g。隨著功率逐漸增大,靈敏度急劇減小。當初始功率增大到20mW以上時,靈敏度仍隨功率減小,但曲線的斜率逐漸趨于平緩。這說明當內腔光阱的初始功率大于20mW時,加速度測量的線性范圍較大。綜合考慮系統的靈敏度和線性范圍后,可通過控制671nm激光器令系統初始功率保持在58.7mW附近(見圖3),此時加速度測量靈敏度為8mW/g,加速度測量范圍最大可達到±5g。
同時,圖4還對不同半徑下靈敏度與初始功率的關系進行了分析。由圖可得,在不同半徑情況下,加速度測量靈敏度均隨著初始功率的增大而降低,各組曲線的變化趨勢基本相同。而隨著半徑的增大,靈敏度隨之大幅提升,其主要原因是微粒質量與其半徑的三次方成正比。因此,適當增大微粒尺寸可提升加速度測量靈敏度。
4 結論
內腔光阱是一種具有自反饋特性的新型光鑷,可將微粒的位移轉化為激光功率輸出。通過該特性建立了一套加速度測量系統,用激光功率與加速度的對應關系進行加速度傳感,可使用高頻光電探測器作為信號輸出源,實現GHz量級的信號采集。
1)本文分析了內腔光阱加速度測量曲線,提出了通過671nm激光改變加速度測量的工作點,以解決加速度測量無法分辨加速度方向的問題。
2)分析了加速度測量系統的靈敏度與工作點選取的關系。對于把半徑為5μm的微粒作為檢測質量的加速度測量系統,其最高靈敏度可達50.2mW/g。當工作點設置為初始功率58.7mW時,加速度測量靈敏度為8mW/g,加速度最大測量范圍可達±5g。
3)通過增大光阱中微粒的尺寸,可以提高加速度測量系統的靈敏度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00