基于滑模PI控制的卡爾曼濾波在空間轉臺的應用
2021-07-28 01:40:44方智毅
航天控制 2021年6期
葉 青 李 雪 馮 宇 李 宇 方智毅
上海宇航系統工程研究所,上海 201109
0 引言
永磁同步電機(permanent magnetic synchronous motor, 簡稱PMSM)因其功率密度高、體積小、功率因數高和優越的動態響應速度[1-2],近年來被越來越廣泛地應用于空間二維轉臺負載的驅動控制。由PMSM驅動的空間二維轉臺的超低速控制是一個新的研究領域。目前,空間二維轉臺負載對PMSM驅動系統最低轉速要求可能達到0.05(°)/s左右,對控制精度的要求也相應地越來越高。超低速PMSM系統是強耦合、非線性的,如果將傳統的PI控制+T法測速方法直接用于二維轉臺的超低速控制,則可能出現如下3個問題:1) T法測速的估計誤差較大導致速度跟蹤誤差較大,達不到要求的精度;2) 超低速工況下的摩擦力矩呈非線性,電纜力矩與角度成正比,傳統的PI控制難以消除這兩個干擾力矩的影響;3) 負載和電機的物理系數(主要是力矩系數和轉動慣量)的時變性導致:根據某一組系數確定的比例、積分系數不適用于所有的工況,傳統的PI控制缺乏自適應性。
國內外學者在解決PMSM低速高精度控制問題上做了很多研究[3-5],在觀測器設計和滑模控制算法的應用方面有以下研究成果。文獻[6]采用插值的方法增加觀測器采樣周期之間的采樣點,提高了觀測精度。文獻[7]采用了卡爾曼濾波的方法獲取更優的低速工況的轉速。文獻[8]采用了高頻注入法,在低速控制時代替機械式位置傳感器來獲取速度角度信息。文獻[9]設計模糊PI 滑模觀測器提高系統的快速性和穩定性。文獻[10]通過擴展卡爾曼濾波(簡稱EKF)實現磁鏈、轉子位置和速度的精確估計,提高了直接轉矩控制的性能。文獻[11]設計的EKF觀測器,把光電碼盤信號的量化誤差考慮為測量噪聲,提升了轉子位置、速度的觀測精度。文獻[12]利用EKF對電機的電阻、電感參數進行識別,有效地改善了PMSM控制性能。文獻[13]設計分數階滑模變結構控制器,來提升系統的動態、穩態性能和魯棒性。文獻[14]采用模糊PID技術與滑模觀測器的新型混合估計策略,進一步提高了系統轉子位置和電機轉速的觀測精度。文獻[15]在直接轉矩控制中運用變指數趨近律滑模變結構控制策略,有效地抑制了滑模變結構的抖振,并且改善了轉矩和磁鏈的脈動過大的問題。文獻[16]設計了一種積分型滑模變結構控制器,通過觀測負載轉矩并反饋到滑模控制器中,使系統具有響應快速、無超調等優點,且對負載的力矩擾動具有較強的魯棒性。文獻[17]提出了一種上下界滑模變結構速度控制器,將速度誤差與系統狀態量的變化相關聯,通過預設負載轉矩的上下界值,實時改進滑模控制律,有效地提高系統的靜態、動態特性與魯棒性。
由于卡爾曼濾波算法和滑模控制算法在工程上都有較強的實用性,因此可以考慮將二者結合起來,應用于空間二維轉臺的超低速控制。本文主要針對空間二維轉臺PMSM的速度環設計展開研究。針對二維轉臺超低速控制的應用場景,提出了一種基于滑模PI控制的卡爾曼濾波算法來改進傳統的PI控制+T法測速方法。這一算法的優勢體現在如下3個方面:1) 卡爾曼濾波算法將滑模PI控制的抖振看作是白噪聲,再根據測量噪聲的隨機分布特性,提取出更準確的轉速信息,提高控制精度;2) 將摩擦力矩和電纜力矩看作是低頻干擾,消耗一定的控制力矩來消除低頻干擾對轉速控制性能的影響;3) 考慮了實際應用中力矩系數和轉動慣量的時變性,用Lyapunov方法確定滑模PI控制律中的控制參數,使得閉環系統必然穩定。為驗證基于滑模PI控制的卡爾曼濾波算法的可行性,本文設計了仿真試驗,將該算法與傳統的PI控制+T法測速方法進行了對比。
1 滑模PI控制算法理論分析
本節假定系統狀態可以準確測量,只討論滑模PI控制律的設計方法,狀態估計方法的討論在下一節中展開。本文中,電流環采用SVPWM算法[18]。在本節假定q軸電流[18]實際值與指令值總是相等的。
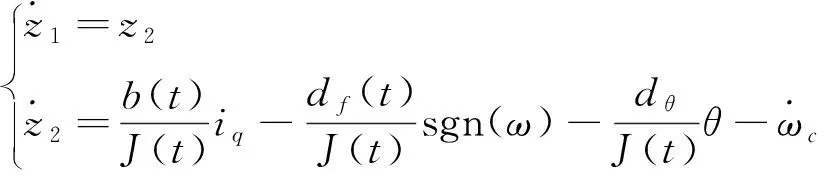
考慮某型二維空間轉臺PMSM速度環的被控系統模型
(1)
其中,t表示時間,J表示轉動慣量,ω表示機械角速度,b表示力矩系數,iq表示q軸電流,df表示摩擦力矩的大小,dθ>0表示電纜力矩系數,θ表示機械角。假設時變參數滿足:Jmin≤J(t)≤Jmax,bmin≤b(t)≤bmax,0≤df(t)≤dfmax。Jmax,bmin,dfmax,dθ>0已知,Jmin,bmax>0未知,這種參數給定在型號研制中常見。


根據式(1),關于z1,z2的系統模型方程可寫成
(2)
設控制律
iq=u0+v
其中PI控制律u0為
u0=-Kiz1-Kpz2
其中,Ki>0為積分系數,Kp>0為比例系數,現需要確定滑模控制律v。
設

(3)
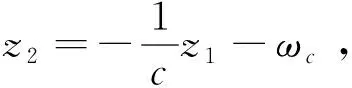
其中滑模變量
s:=z1+cz2+cωc,c=Kp/Ki
開關變量
σ1=1,當sω<0時,σ1=0,其他
σ2=1,當sθ<0時,σ2=0,其他
常增益ks>0為任意小的正常數。下面給出定理1。
證明:設第一個Lyapunov函數為
則對V1求導,再代入控制律(3),得到
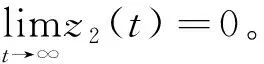
所以當s≠0時,s在有限時間內收斂為0。當s=0時,再設第2個Lyapunov函數
所以如果在時刻t0時s(t0)=0,則在任意時刻t>t0,當t→∞時,
s(t)≡0?V2(t)→0?z1(t)→-cωc?z2(t)→0
所以閉環系統漸近穩定,證畢。
從式(3)中可見,滑模PI控制律需要已知的變量包括:θ,ω,Jmax,bmin,dfmax,dθ,dmax。其中:θ,ω需要用卡爾曼濾波算法進行估計;Jmax,bmin,dfmax,dθ是負載的固有物理量,可以經過事先實驗測得;dmax取決于位置環的控制律,是已知的。
可以看出滑模PI算法有以下3個優點:1) 需要在線估計的物理量較少,有可操作性;2) 只需已知轉動慣量上界和力矩系數下界,所以這一算法是通過施加強控制力來使系統穩定:只要增加控制力,就能提高魯棒性;3) 傳統PI控制律需要同時控制2個變量:跟蹤誤差和其積分,而滑模PI控制律只需控制一個變量s,這對于超低速工況是實用的。
2 卡爾曼濾波算法
本文提出的卡爾曼濾波算法參考了文獻[19]的設計,但是在處理干擾力矩方面有所不同。
伺服系統的勻速運動離散化方程為
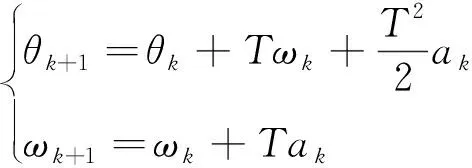
(4)
式中,下標k表示該變量為第k個采樣周期的變量。基于(4)的卡爾曼濾波的過程及測量方程如下:
其中,X=[θ,ω]T為狀態變量,a表示角加速度,z為角度測量值,w,v分別為過程噪聲和測量噪聲,A,B,C定義為:
卡爾曼濾波算法如下:
(5)

在算法(5)的實施中需要已知角加速度ak,電機勻速轉動時ak約等于0,但是在仿真試驗中可以發現如果令ak恒等于0,則濾波性能較差。根據式(1)可知,ak的準確值應為
其中,iqk為第k個周期的q軸電流值,可以在線測量,但是在實際工程中b(t),J(t),df(t)未必已知,且θk和ωk尚需要進行估計。因此本文中提出ak的估計方法為
這一估計方法與文獻[19]不同,優點是:避免了控制與狀態觀測的耦合,信號的因果關系明確,易于工程實現。
3 基于滑模PI控制的卡爾曼濾波算法在空間轉臺超低速控制中的應用
在空間軌道運行的某型號高精度轉臺上的負載由PMSM拖動。PMSM的控制通常由外到內分為三環:位置環、速度環和電流環。一個典型的三環控制框圖如圖1所示。
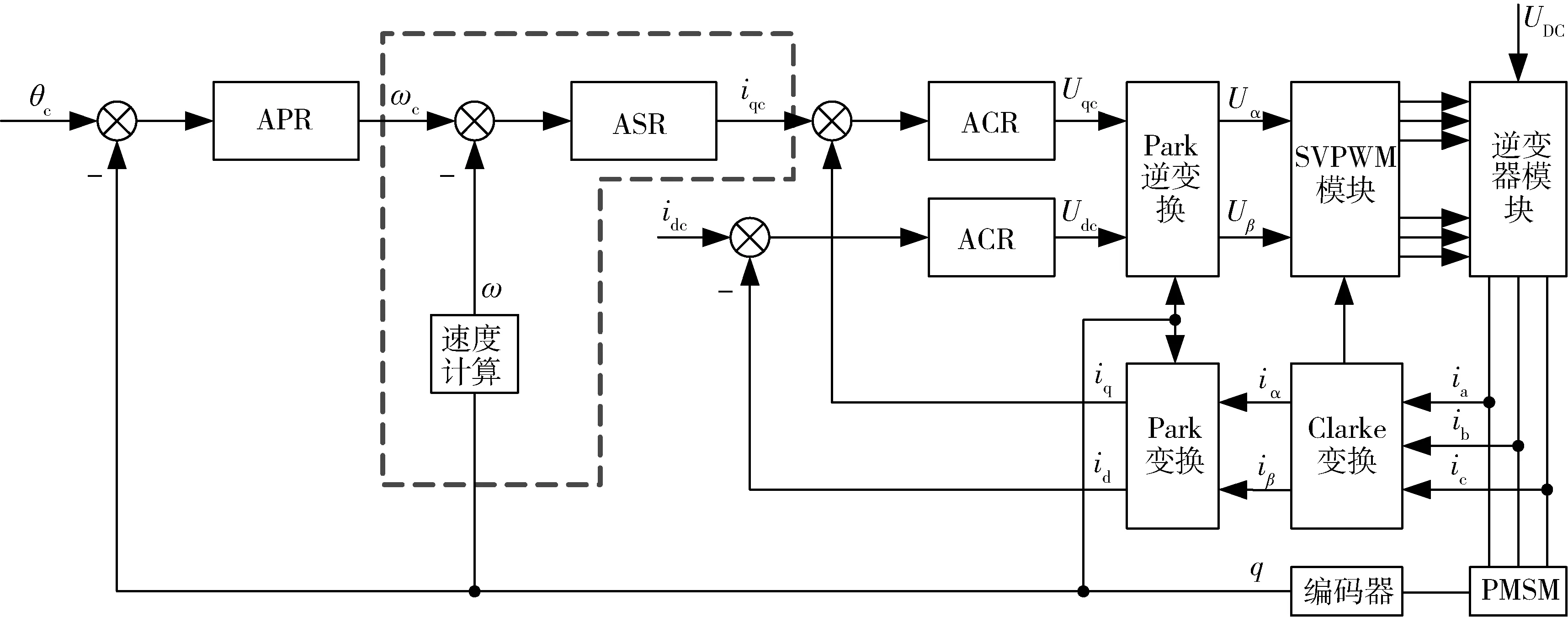
圖1 PMSM的三環控制結構
圖1中APR,ASR和ACR分別表示位置環、速度環和電流環控制律,本文提出的算法可以被用來改進綠色虛線框中的環節。在空間高精度二維轉臺的一些應用場景中,要求負載繞方位軸和俯仰軸緩慢地勻速轉動,對一定范圍的空間區域進行掃描。這一具體要求體現在PMSM系統中,可以抽象為:位置環輸出恒定非零的速度環指令,要求PMSM轉速以足夠高的精度穩態精度可能要求達到0.01(°)/s跟蹤恒定的速度環指令。當速度環指令很小(可能達到0.05(°)/s)時,會帶來難以解決的控制問題,主要體現在如下3個方面:
1)電機轉速過低時,無法用傳感器直接測量速度,需要從角度信息中提取出速度信息;
2)摩擦力矩和電纜力矩在系統模型中呈現非線性,低速運行時,靜摩擦力的影響不可忽視;
3)由于二維轉臺兩軸間的耦合性,繞方位軸的轉動慣量會有很大幅度的變化,可能影響控制性能。
本文提出了基于滑模PI控制的卡爾曼濾波算法來解決這3個問題。綜合考慮第1節和第2節的算法,進行控制和狀態估計一體化設計:在每時每刻利用前一采樣時刻的估計值,用第2節的卡爾曼濾波算法求出當前時刻的估計值,然后將這一估計值代入到第1節的滑模PI控制律中求解電流環指令。這樣得到的基于滑模PI控制的卡爾曼濾波算法如下:
2)根據算法(5)計算出Xk,Pk,令θk=Xk(1),ωk=Xk(2);
3)計算z2:=ωk-ωc,z1:=z1+Tz2;
4)計算PI控制輸入和滑模控制輸入:
u0k=-Kiz1-Kpz2
(6)
其中
σ1k=1,當sωk<0時,σ1k=0,其他
σ2k=1,當sθk<0時,σ2k=0,其他
5)輸出電流環指令iqck=u0k+vk。
由于這一算法常用于轉臺的恒定轉速控制,因此可以取定dmax=0。
基于滑模PI控制的卡爾曼濾波算法的控制框圖如圖2所示。
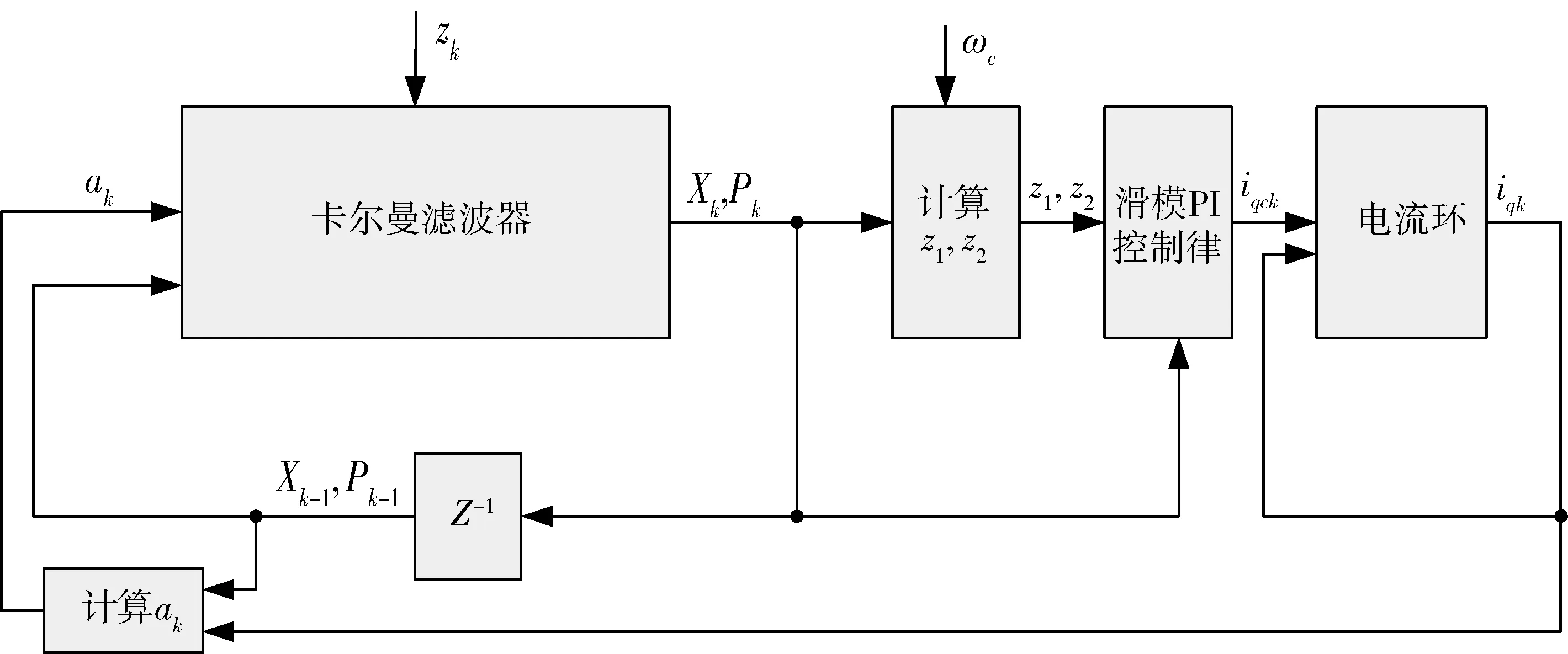
圖2 控制框圖
針對二維轉臺超低速控制面臨的3個控制問題,基于滑模PI控制的卡爾曼濾波算法在以下3個方面予以解決:
1)卡爾曼濾波器的設計考慮了滑模控制固有的抖振現象,可以根據電流環輸出和位置環輸出估計出較為準確的角速度,根據文獻[20]的定理2.10可知,卡爾曼濾波器能夠實現無偏估計。
2)由定理1的證明可知,滑模控制算法以盡可能大的控制力使滑模變量收斂為0,使得摩擦力矩和電纜力矩對滑模變量的收斂速度沒有影響,進而對速度跟蹤誤差的收斂性沒有影響。
3)由式(3)可見,滑模PI控制律不需要已知當前的轉動慣量大小,只需已知轉動慣量的最大值,再由定理1的證明可知轉動慣量的變化對系統穩定性沒有影響,對滑模變量的收斂速度也沒有影響。
4 仿真校驗
根據某型二維轉臺負載和電機型號確定模型參數,其中J≤12kg·m2,b≥7N·m/A,轉動慣量時變,按照圖1搭建Simulink仿真模型,用基于滑模PI控制的卡爾曼濾波算法改進速度環。現給定角度測量干擾的標準差為0.001°,要求速度跟蹤的穩態跟蹤誤差在0.01(°)/s以下。
首先給出超低速工況(速度跟蹤指令為0.05(°)/s)下的仿真結果,與傳統的PI控制+T法測速方法進行了對比,如圖3所示。
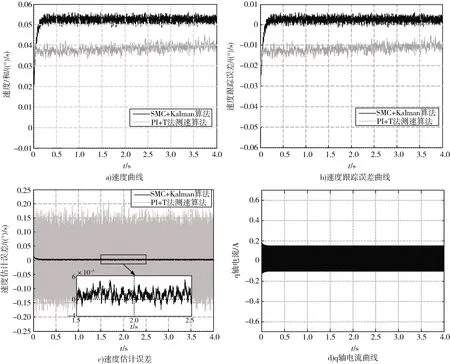
圖3 超低速工況下的仿真曲線
由圖3可見,卡爾曼濾波算法保證在超低速工況下速度估計誤差始終在0.006(°)/s以下,如圖3(c)所示。同時從圖3(c)中可見T法測速的估計誤差遠遠大于卡爾曼濾波的估計誤差,這會引起控制性能的下降。滑模PI控制算法保證了速度跟蹤性能良好,如圖3(a)所示。由圖3(d)可見q軸電流始終在0.2A內變化。由圖3(b)可見,基于滑模PI控制的卡爾曼濾波算法保證速度跟蹤的穩態誤差在0.005(°)/s以下,滿足控制精度要求,而傳統方法不能滿足設計要求。
由圖3(b)可見本文提出的算法并不能保證跟蹤誤差在0(°)/s左右變動,這是因為卡爾曼濾波器對速度估計始終有一個正的偏差,如圖3(c)所示。這可能是卡爾曼濾波算法中對干擾的估計不精確引起的。更多的仿真試驗結果表明,隨著速度指令的提高,速度估計的偏差逐漸減小,直到不明顯。而速度跟蹤精度與速度指令基本無關,始終能夠保持跟蹤精度小于0.01(°)/s。在不同速度指令下,本文提出的算法與PI控制+T法測速方法的控制精度對比如圖4所示。
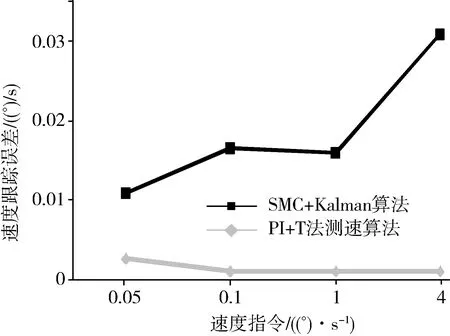
圖4 不同速度指令下跟蹤精度對比
從圖4可見,本文提出的算法在速度指令提高時精度更高,而傳統方法正好相反。這是因為T法測速在速度指令提高時,差分運算時會引入更大的噪聲。
下面給出速度指令階躍變化工況下的速度響應,速度指令為0.05(°)/s→0.25(°)/s→0.15(°)/s。仿真結果如圖5所示。
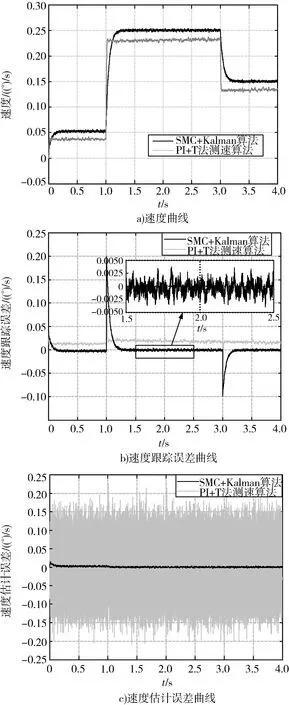
圖5 階梯速度指令下的仿真曲線
仿真結果表明卡爾曼濾波的速度估計誤差始終在0.004(°)/s以下,如圖5(c)所示。同時滑模控制算法保證了速度跟蹤性能良好,速度動態接近一階慣性環節,如圖5(a)所示。由圖5(b)可見,速度跟蹤的穩態誤差在0.004(°)/s以下,滿足控制精度要求。
5 結論
提出了一種基于滑模PI控制的卡爾曼濾波算法,用于空間高精度二維轉臺上PMSM的低速控制。這種算法改進了傳統的PI控制+T法測速方法,有以下3個優點:1)卡爾曼濾波算法能夠更準確地估計較低的轉速,提高控制精度;2) 能夠克服非線性干擾力矩引起的低頻干擾;3) 對模型不確定性具有足夠強的魯棒性。仿真試驗結果表明,當PMSM運行于低速區域時,本文提出的算法對環境噪聲有足夠強的魯棒性,能夠保證閉環系統的速度跟蹤性能良好;在超低速工況下,本文算法保證速度跟蹤精度較PI控制+T法測速更優,且速度估計誤差遠低于PI控制+T法測速。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
測控技術(2018年12期)2018-11-25 09:37:34
電子測試(2018年18期)2018-11-14 02:30:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電信科學(2016年10期)2016-11-23 05:11:56
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電子設計工程(2015年13期)2015-02-27 12:06:43
