關于DSJ80型煤礦帶式輸送機變頻驅動系統的研究
2021-07-28 05:45:02馬成成
機械管理開發 2021年6期
馬成成
(山西蘭花集團莒山煤礦有限公司,山西 澤州 048002)
引言
由于帶式輸送機具有結構簡單、工作效率高、易于使用與維護等特點,且能適應比較惡劣的工作環境,所以在煤炭開采行業中被廣泛地應用,逐漸發展成為運輸行業中不可或缺的重要裝備。為了提高帶式輸送機的運輸效率,常采用提高皮帶輸送速率的方法,但是目前國內由于技術發展相對落后,帶式輸送機的工作運行速度一般在5~7 m/s左右,皮帶的速率成為制約輸送機效率的一個重要因素。
為了提高帶式輸送機的生產效率,嘗試提高皮帶的運行速率,如果驅動系統能夠很好地控制將有效提高皮帶運行速率。變頻驅動技術的發展,使得帶式輸送機的速度精準控制成為可能,變頻技術可有效提高帶式輸送機運行的平穩性。變頻驅動技術是通過改變驅動電機的電源頻率實現對電機輸出轉速的調整,能夠在滿足一定轉矩的要求前提下,實現帶式輸送機的速度調控[1]。
1 輸送機變頻技術應用現狀
變頻技術的基本原理是利用改變電流各電極之間的切換頻率,實現對電機速率的控制,由電機驅動其他設備的運行。隨著電子、電力技術的不斷發展,以及PLC控制程序的發展,催生了較多實用且先進的帶式輸送機變頻驅動控制系統。目前主流的帶式輸送機驅動裝置一般可分為減速箱直接驅動類、液力耦合器變速箱驅動的兩類。
液力耦合器也分調速型和一般直驅型液力耦合器,直驅型液力耦合器一般僅適用于小型帶式輸送機,因其在運行過程中沖擊比較大,很難使得帶式輸送機做到運量更大、運輸距離更長等領域。但調速型液力耦合器,可實現軟啟動與軟停車,對設備起到了較好的保護作用,該及時一般被應用于大型帶式輸送機結構中[2]。
2 驅動系統需求分析
驅動系統是帶式輸送機動力來源,其核心部件,帶式輸送機的性能包括運量、運輸能力、平穩性等于驅動系統直接相關。帶式輸送機驅動系統平穩性不光影響設備的運量、平衡功率等,甚至可能導致輸送機故障頻發,容易產生皮帶打滑、斷帶等故障。為了研究得到一種比較適用于帶式輸送機的變頻驅動系統,國內外許多研究人員對其進行了大量的研究工作,研究并形成形式多樣的帶式輸送機變頻驅動系統。
性能優越、理想的驅動裝置應具有如下特點:啟動時間在一定范圍內可調,也可在滿載工況下的啟動;可對皮帶加速度進行控制,盡量平緩、沖擊力小;啟動時對外界用電設備的電能沖擊要小,避免對外部電源設備造成損害;可平穩運行且具有抗過載能力,具有過載保護;配置先進的變頻控制器,變頻控制器具有較好的穩定性與兼容能力[3]。
3 驅動系統總體設計
DSJ80型帶式輸送機帶寬1600mm,帶長2400m,皮帶最大運行速率。本套系統采用的是調速型液力偶合器變速驅動方式,調速系統主要結構部件包括泵輪、渦輪以及渦輪軸、泵輪軸、電機軟啟動控制系統、設備冷卻系統等。
驅動系統的工作原理是在電機輸入端轉速不變的情況下,通過調節其工作腔內液體體積,達到改變設備輸出功率,控制精度較高,適用環境較廣,同時磨損和發熱量都較小,具有較長的使用壽命。
近年來,隨著電控技術的不斷發展,變頻控制系統在電能節約、環保、提高效益方面做出了突出貢獻。本套驅動系統中采用PLC與液力偶合器聯合控制驅動電機的輸出功率,驅動系統的總體設計方案如下頁圖1所示,有PLC實現對變頻器的邏輯控制,使該控制系統性能更優。

圖1 變頻驅動系統總體結構
4 變頻驅動系統設計
4.1 變頻器結構原理
變頻器一般可分為交流變頻與直流變頻兩類,目前市場上應用最廣泛的還是直流變頻器,特別是一些高壓用電設備。直流變頻器工作范圍更廣,其基本工作原理是利用整理設備將公頻交流電整流為直流電,然后再利用電流逆變器將直流電轉換為可調控的等效交流電。直流變頻可直接通過改變電源的頻率實現對電機輸出功率的調節,可實現無級變速,如圖2所示為直流等效交流器結構示意圖[4]。
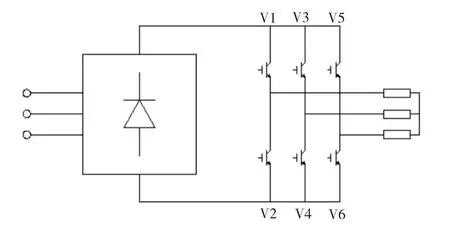
圖2 直流變頻器結構原理圖
4.2 變頻驅動單元
帶式輸送機常帶載啟動,尤其是在啟動或停車過程中對變頻控制器要求較高,根據項目實際需求選擇了德國西門子的矢量變頻控制器XINMT BJ型變頻器,該變頻器驅動系統結構如圖3所示,該變頻器驅動單元主要由10 kV電網、斷路器、變壓器、變頻器等結構組成。該型變頻器驅動系統采用了三電平、智能控制、矢量控制等技術,與之匹配的三向異步電機額定功率為5.2 MVA,設備的額定電壓是3.6 kV。該變頻驅動控制器具有啟動電流小、啟動時間可設定等特點,對于保護設備,減小機械結構之間的沖擊具有重要作用[5]。

圖3 驅動單元結構示意圖
4.3 驅動單元主要設備
對驅動單元結構中硬件設備選型做簡要介紹,首先是三相異步電動機,在4.2小節中介紹了該異步電機的選型;變頻器型號9CSE80AA1,其電源額定電壓為2×3-ph 1.2 kV AC,額定工作頻率為50/60 Hz,最大輸出頻率為100 Hz,電網功率因數cosφ>0.96。
整流器:變頻器型號為SIMOV-ST,其結構框圖如4所示,將兩個不可控橋式二極管分別連接到三相繞組的低壓電網上,從而形成一個穩定可靠的12脈沖低壓電源。逆變器:由HS-IMJS二極管、續流二級管和中點二級管構成,利用二極管單相流動的特性,保障二極管上的電壓均勻分配[6]。
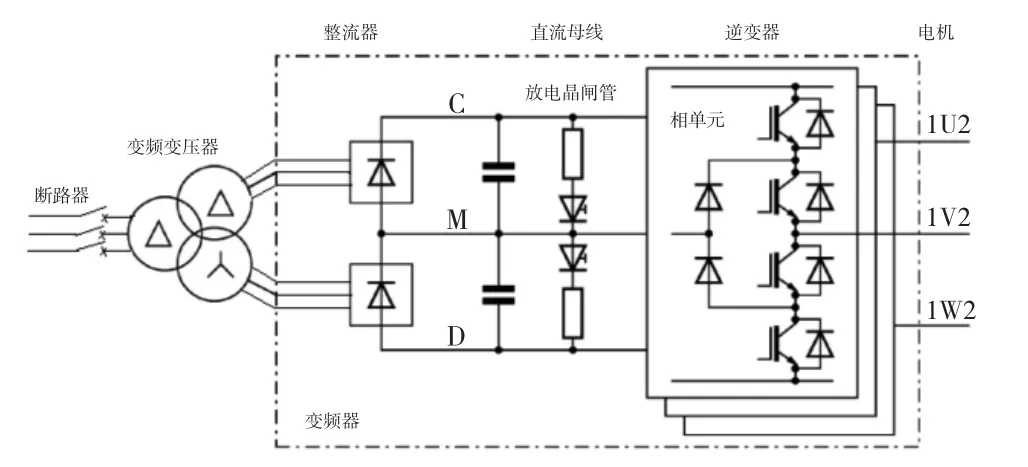
圖4 SIMOV-ST變頻器方框圖
5 變頻驅動控制系統的設計
為了將帶式輸送機的驅動控制系統與各硬件設備整合起來,需設計一套變頻控制系統,在此選擇了HE3-08型主控制器,SIMOV-ST變頻器中BM2模塊可通過總線控制方式將主控制器與變頻器相連接在一起,在總線設計中接入工業互聯網,實現與控制計算機的連接,從而實現遠程實時監控且可操作的變頻驅動技術。
要實現對帶式輸送機變頻驅動控制,需要的輔助系統包括高壓柜控制系統、變頻控制系統、保護控制等,下面對變頻驅動控制系統主要輔助控制系統做簡要介紹。
1)高壓柜控制。為了確保變頻驅動系統安全,將高壓柜控制由變頻器完成,變頻器實現對高壓柜的控制;同時為了保證高壓柜的穩定性與可靠性,在變頻器內的斷路器增加失壓保護機構,可有效防止高壓柜中的電源與備用電源同時斷電對設備造成嚴重危害的情況。
2)變頻器控制。PLC可通過網絡總線與各變頻器取得通信,形成變頻驅動控制系統的通信網絡,其連接框圖如下頁圖5所示。自動化控制主站通過互聯網掃描各變頻器上適配器,各設備通信接口與工業互聯網總線相連,并將連接器終端電阻調到NO位置,構建起對變頻器的控制系統。
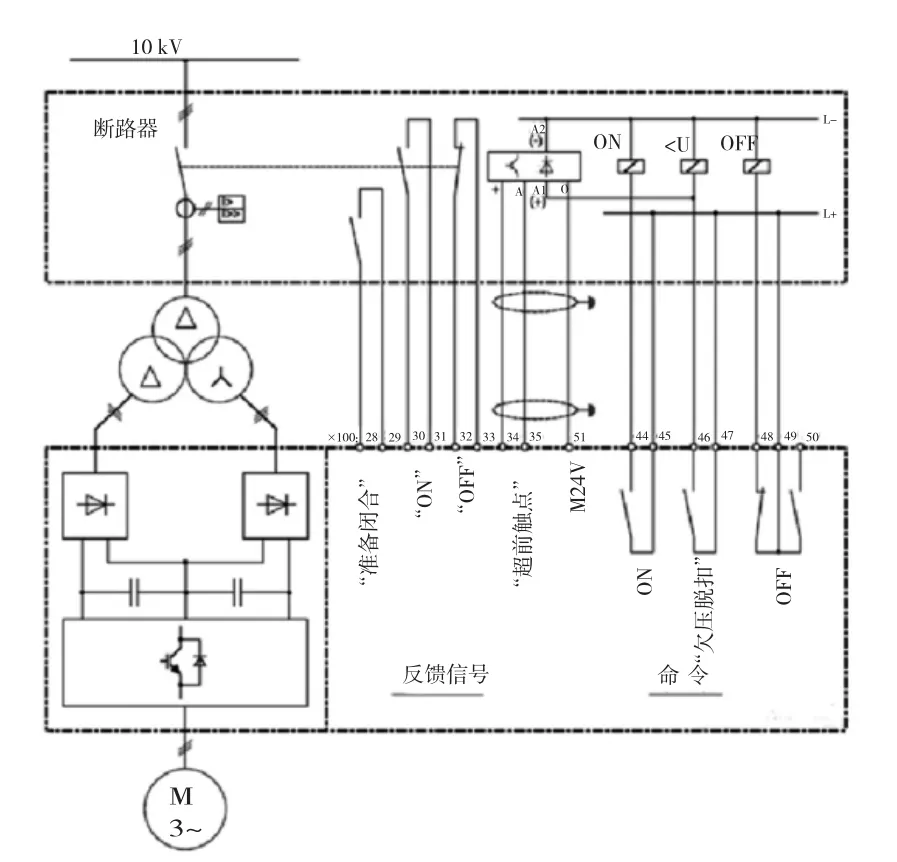
圖5 變頻器控制框圖
3)保護控制。根據帶式輸送機的控制需求,在該驅動控制系統中加入對輸送機的保護控制功能,保護控制可借助設備上布置的傳感器,接入驅動控制器從而實現對帶式輸送機的監測。一般保護控制具備皮帶跑偏、打滑、斷裂、溫度異常、皮帶撕裂等故障保護功能。
6 結語
相較于傳統的直驅控制器,變頻驅動控制器對設備保護更好,具有節能、控制精度高等優點,可實現對輸送機的驅動控制,該控制系統的成功設計為帶式輸送機驅動控制系統設計提供有力參考。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
工業設計(2016年12期)2016-04-16 02:52:00
