刮板輸送機(jī)驅(qū)動鏈輪與鏈條接觸動力學(xué)研究
2021-07-28 05:44:36盧燕
機(jī)械管理開發(fā) 2021年6期
關(guān)鍵詞:模型
盧 燕
(西山煤電(集團(tuán))有限責(zé)任公司機(jī)電廠,山西 太原 030053)
引言
我國煤炭開采量不斷加大,促進(jìn)了刮板輸送機(jī)的快速發(fā)展[1]。到目前為止,已有很多學(xué)者對刮板輸送機(jī)的技術(shù)發(fā)展進(jìn)行了大量研究。孟國營、羅慶吉、姜翎燕等針對刮板輸送機(jī)的發(fā)展趨勢,詳細(xì)闡述了我國刮板輸送機(jī)的發(fā)展歷史和現(xiàn)狀,介紹了刮板輸送機(jī)的主要分類,重點(diǎn)指出了未來刮板輸送機(jī)技術(shù)研究的四個關(guān)鍵點(diǎn),即加強(qiáng)基礎(chǔ)理論研究、使用和研制新型材料、改進(jìn)關(guān)鍵部件的加工工藝、設(shè)計研發(fā)綜采面刮板輸送機(jī)狀態(tài)監(jiān)測及故障診斷系統(tǒng),并指出了未來刮板輸送機(jī)發(fā)展的趨勢[1-3]。對于我國的刮板輸送機(jī)技術(shù),在長距離運(yùn)輸?shù)臓顩r下存在功率不足等問題,對于鏈輪傳動裝置的研究,郭忠進(jìn)行了大量的數(shù)值模擬計算[4],為本文研究提供了參考。本文在已有研究的基礎(chǔ)上,通過對刮板輸送機(jī)鏈輪傳動系統(tǒng)建模以及數(shù)值模擬計算,得到中間鏈環(huán)受力最大、位移變形量大的結(jié)論,為改善鏈輪傳動提供依據(jù)。
1 礦用刮板輸送機(jī)鏈輪傳動系統(tǒng)的建模
刮板輸送機(jī)由機(jī)頭部、機(jī)尾部、溜槽、刮板鏈、鏈輪以及傳動裝置等構(gòu)成。其中,刮板鏈主要負(fù)責(zé)牽引刮板輸送機(jī)使其行走,上溜槽負(fù)責(zé)貨物的裝卸載,中部溜槽則可以調(diào)節(jié)刮板輸送機(jī)的長度。刮板鏈?zhǔn)枪伟遢斔蜋C(jī)的主要工作部件,與運(yùn)輸貨物直接接觸,在摩擦力的作用下實(shí)現(xiàn)貨物的運(yùn)輸,因此要求刮板鏈具有一定的強(qiáng)度,以保證其有一定的韌性和強(qiáng)度實(shí)現(xiàn)貨物的運(yùn)輸。
采用CATIA數(shù)值模擬軟件對鏈輪傳動系統(tǒng)模型進(jìn)行建模以及有限元分析計算。CATIA數(shù)值模擬軟件是法國達(dá)索公司設(shè)計開發(fā)的軟件,該軟件支持項目前期設(shè)計、后期模擬以及計算分析,在進(jìn)行曲面建模方面,該軟件有絕對的優(yōu)勢,因為鏈輪和鏈環(huán)結(jié)構(gòu)復(fù)雜,完整模擬鏈輪與鏈環(huán)結(jié)構(gòu)用CATIA軟件是最好的選擇。
在建模之前需分別了解鏈環(huán)和鏈輪的結(jié)構(gòu)。圓環(huán)鏈?zhǔn)怯扇舾蓚€鏈環(huán)相互串聯(lián)連接而成,且每個鏈環(huán)之間的夾角都是固定值,都為90°。本文模擬中選用的鏈條規(guī)格為14 mm×50 mm,采用邊雙鏈形式,運(yùn)輸長度最大50 m,運(yùn)輸量為80 t/h。鏈輪齒輪數(shù)為7,鏈輪外直徑為253 mm,節(jié)圓直徑為225 mm,立環(huán)立槽直徑為164 mm,立環(huán)立槽寬度為20 mm,齒形圓弧半徑為29 mm、長度為7 mm、厚度為25 mm,鏈窩中心距為68 mm。
在上述參數(shù)基礎(chǔ)上,對鏈輪鏈環(huán)進(jìn)行建模。因為鏈環(huán)的數(shù)量較多,逐個導(dǎo)入工作繁瑣且效率低,因此,把整個部分分為鏈輪鏈環(huán)接觸部分和不接觸部分。對于不接觸部分,以直線型排序,形成直線對稱的鏈條分裝圖,然后將其導(dǎo)入總圖,在進(jìn)行裝配工作后,進(jìn)行檢查和報錯工作,以確保模擬的準(zhǔn)確性。此方法大大提高了模擬的效率且模擬結(jié)果更準(zhǔn)確,因此得到如下頁圖1所示的鏈輪鏈環(huán)三維裝配模型圖。

圖1 鏈輪鏈環(huán)三維裝配模型圖
2 鏈輪傳動過程數(shù)值模擬及接觸分析
在刮板輸送機(jī)運(yùn)行過程中,依靠齒輪傳動必然涉及到齒輪的磨損和壓潰以及鏈條和鏈環(huán)之間的接觸受力,因此對其進(jìn)行動態(tài)數(shù)值模擬研究其力學(xué)特性就顯得尤為重要。數(shù)值模擬計算過程一般有三步,即數(shù)值模型的預(yù)處理、模型的計算以及后處理三步。選用ABAQUS軟件對傳動過程進(jìn)行接觸動力學(xué)分析。
ABAQUS軟件在計算非線性運(yùn)動的過程中有明顯的優(yōu)勢,因此被大量應(yīng)用于工程的仿真與模擬計算中。在刮板輸送機(jī)運(yùn)動過程中,因為設(shè)備為非線性動態(tài)運(yùn)行,當(dāng)慣性力隨時間變化很快時就需要做動力學(xué)分析計算,而ABAQUS軟件根據(jù)實(shí)際工程應(yīng)用而生,在處理非線性動態(tài)問題方面優(yōu)勢明顯,因此采用ABAQUS軟件。
在使用ABAQUS軟件進(jìn)行計算的過程中,借用上文建立的三維模型,對模型進(jìn)行網(wǎng)格劃分,盡量避免因為鏈輪鏈環(huán)復(fù)雜結(jié)構(gòu)的不規(guī)律性導(dǎo)致的網(wǎng)格難劃分問題。該模型比較復(fù)雜,在進(jìn)行網(wǎng)格劃分時計算量大,因此在有限元模型處于理想狀態(tài)下進(jìn)行劃分能減少計算機(jī)的運(yùn)算時間,網(wǎng)格劃分結(jié)果如圖2所示。

圖2 圓環(huán)鏈與驅(qū)動鏈輪網(wǎng)格劃分結(jié)果圖
由于對模型施加載荷只能施加在節(jié)點(diǎn)和單元組件上,需要提前建立相關(guān)信息。針對已經(jīng)建立的模型,選擇1個鏈輪和10個鏈環(huán)作為分析對象。將鏈輪與平環(huán)之間的接觸體設(shè)為彈性體,但卻不存在干涉現(xiàn)象;模型中靜摩擦系數(shù)為0.4,動摩擦系數(shù)為0.3,設(shè)初始鏈條拉力為7.5 kN,速度為0.75 m/s;對鏈條的嚙合處施加載荷,假定鏈輪逆時針旋轉(zhuǎn),旋轉(zhuǎn)初速度為63.5 r/min,仿真時間為0.1 s,分析步數(shù)為250步。在上述邊界條件的基礎(chǔ)上進(jìn)行計算求解。
通過數(shù)值模擬計算,分別得到如圖3所示的圓環(huán)鏈嚙合力最大處應(yīng)力云圖和如圖4所示的鏈環(huán)在不同時刻的位移云圖。
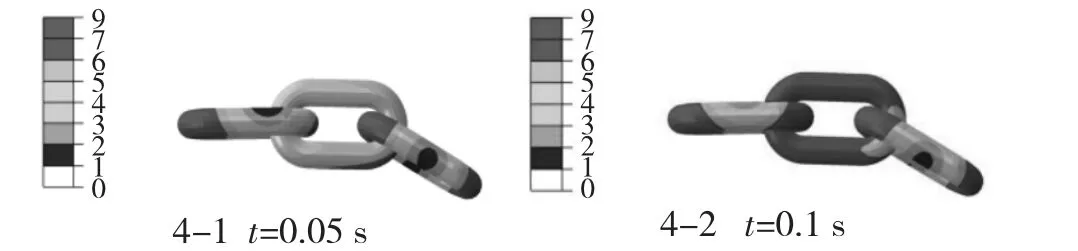
圖4 鏈環(huán)在不同時刻的位移(mm)云圖
從圖3可以看出,靠左的平環(huán)受力較為集中,當(dāng)鏈環(huán)運(yùn)行時,受到x方向的拉應(yīng)力,在鏈環(huán)彎臂處產(chǎn)生較大的應(yīng)力,在相互接觸面上最大應(yīng)力值達(dá)到782 MPa。從這個模擬結(jié)果可以看出,主動作用的鏈環(huán)在瞬間應(yīng)力集中的情況下拉動與之接觸的鏈環(huán),巨大的振動作用使得鏈環(huán)受力變大,長期作用下,容易造成鏈環(huán)變形斷裂等現(xiàn)象。

圖3 圓環(huán)鏈嚙合力最大處應(yīng)力(MPa)云圖
從圖4可以看出,在整個鏈環(huán)位移過程中,隨著時間的增加,位于中間的立環(huán)位移量最大,最大位移達(dá)到0.009 m,因為左平環(huán)為主動平環(huán),帶動中間平環(huán)和右邊平環(huán)移動,因此左平環(huán)位移相較右平環(huán)位移大。究其原因是,在力的作用下,左平環(huán)對后邊平環(huán)產(chǎn)生拉力,造成右邊平環(huán)變形。由此可知,立環(huán)和平環(huán)接觸的部位受力集中,容易受損。
3 結(jié)論
通過對礦用刮板輸送機(jī)鏈輪傳動系統(tǒng)建模以及鏈輪傳動過程數(shù)值模擬及接觸分析得到,在鏈環(huán)受力運(yùn)行的過程中,中間鏈環(huán)因為應(yīng)力集中受力最大,因此位移變化也最大,在長期運(yùn)行中容易被磨損破壞,影響刮板輸送機(jī)的運(yùn)輸效率,因此礦井應(yīng)該選擇合適型號的刮板輸送機(jī)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
