基于T-S模糊建模的廣義預測控制系統在熱工過程中的應用
2021-07-23 03:05:30何同祥
儀器儀表用戶 2021年7期
孫 濤,何同祥
(華北電力大學 控制與計算機工程學院,河北 保定 071003)
0 引言
鍋爐過熱蒸汽溫度是發電廠機組安全與經濟運行的重要參數之一[1]。過熱汽溫過高或者過低都會影響過熱汽溫控制系統的熱循環效率,甚至會造成生產事故[2]。
廣義預測控制(GPC)是預測控制中最常用的控制算法,此算法有三大特點:第一,模型參數少,優化相對簡單;第二,具有自適應控制的優點并且比自適應控制的魯棒性更強;第三,分為多步預測、滾動優化、反饋校正3個部分。
模糊建模[3]就是根據已知的輸入輸出,建立一系列的模糊規則,辨識出被控對象的結構和參數,從而得到特定的模糊模型。此類辨識方法適用于航空航天、軍工、火電廠等非線性系統的被控對象建模中。
本文先將模糊建模和預測控制相結合得到模糊預測控制算法,并通過在MATLAB軟件上搭建simulink模型仿真,驗證了該控制方法具有良好的動態響應特性。
1 基于T-S模糊建模的廣義預測控制算法的設計
1.1 模糊辨識建模
模糊建模[4]目的是使模型的輸出y(t)與系統的實際輸出y(t)相同或者相近。
可將模糊辨識建模的過程分為如下步驟:第一,劃分模糊集合;第二,建立模糊規則;第三,篩選模糊規則;第四,構造模糊規則域。
1.2 模糊算法的研究
1.2.1 T-S模糊辨識算法
T-S模糊模型[5]的實質是把整個非線性系統近似看成是多個線性子系統組合的模糊逼近。
設整個非線性系統表示為:

由于式(1)是一個非線性系統,因而可以利用模糊建模的方法。T-S模糊辨識的原理是由一系列的“if-then”語句來描述整個非線性系統,每一個線性子系統都可以用一個“if-then”語句來表示,這樣把一系列的線性子系統組合就可以得到一個非線性系統,T-S模糊模型的形式為Ri:

其中,fi(·)取為輸入變量的函數,并且由于非線性系統可以由子系統線性組合表示,即Ri可以表示為:

定義如下:
μi是第i條語句輸入向量的隸屬度,即:

式(4)中,∏是模糊算子,通常采用取小預算或者是乘積運算。

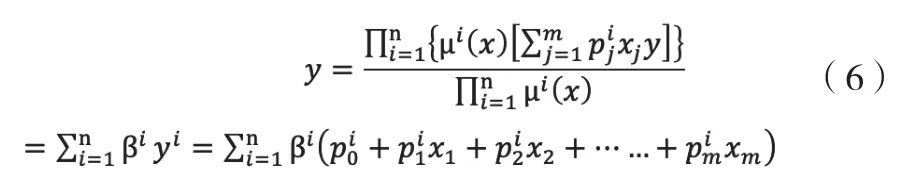
那么,常規T-S系統的輸出為:
1.2.2 改進的模糊聚類算法的T-S模糊辨識方法
傳統T-S模糊模型辨識是對前件和結論部分的參數進行聯合辨識,會在一定程度上限制輸入輸出數據的誤差,而在實際的熱工過程中收集的數據誤差較大。因此,本文提出了一種改進的遞推模糊聚類在線辨識算法,提高了模糊建模方法對現場采集數據的容錯能力以及模型辨識的精確度。
這種算法是在原有算法的基礎上,每一次辨識都會對當前訓練樣本進行一次中心向量的修正,從而提高辨識精度[6]。其具體步驟如下:
1)給定輸入輸出數據x,y。
2)確定輸入樣本點的隸屬度μi:

3)計算距離di:

4)計算聚類半徑ri:

5)修正中心向量zi:

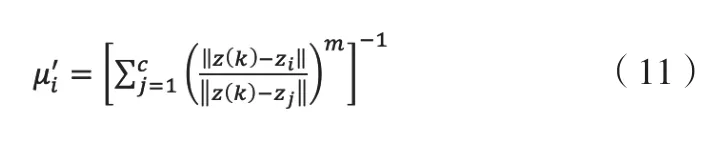
6)修正隸屬度μi:
因此,改進后算法辨識步驟如下:
①參數初始化:確定λ和c,在線辨識得到zi。
②計算μi、di和ri。
③進行如下判斷:
若di<ri,轉至式(7);
若di≥ri,轉至式(4)。
④ 在線修正中心向量zi和隸屬度μi。
⑤ 若k=N,轉至式(6),否則轉至式(4)。
⑥ 若J滿足辨識精度,辨識結束;否則增加c,轉至式(3),重新辨識,直到J滿足辨識精度,辨識結束。
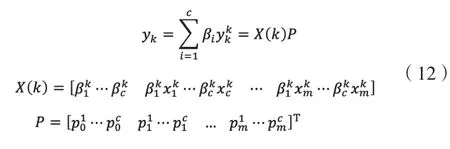
通過改進的模糊聚類辨識,T-S模糊模型的輸出可以表示為:
采用改進模糊聚類算法的T-S模糊辨識方法辨識過熱汽溫系統輸出參數,如圖1所示。
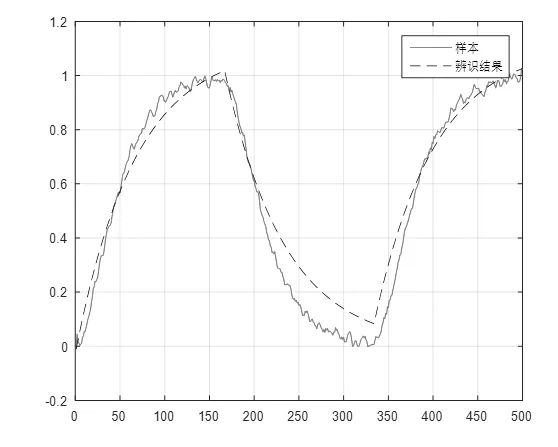
圖1 辨識過熱汽溫系統輸出參數Fig.1 Identification of output parameters of superheated steam temperature system
1.3 廣義預測控制算法
1.3.1 預測模型
假設被控對象CARIMA模型為:
其中,y(k),u(k),ζ(k)分別是系統的輸出、輸入和干擾信號,Δ為差分算子。
1.3.2 滾動優化
1)目標函數

為使y(k)盡可能平穩地到達設定值w,選用如下參考:
2)輸出預測
為了預測j步以后的輸出,引入Dioaphantine方程:


由式(13)、式(17)和式(18)可得:

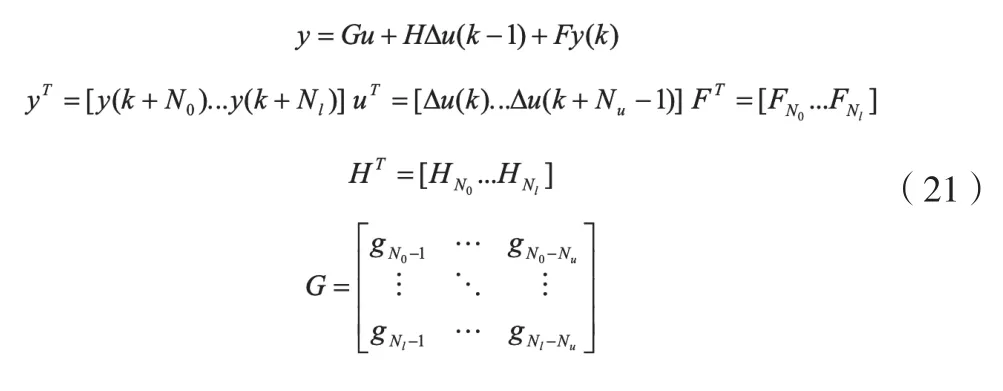
由于ω(k+j)都是k時刻以后的白噪聲,則k+j時刻的最優預測是:

寫成向量形式即為:
3)最優控制律
把式(20)代人式(21),并令?J/?u=0,得到:

取向量u的第一個分量即為Δu(k),則控制器的輸出為:

廣義預測控制律表示為式(22)和式(23)。
1.3.3 反饋校正
廣義預測控制的反饋矯正體現在:在滾動優化的過程中,實時地把系統實際輸出與預測值相比較,依據兩者的差值來在線修正模型參數,從而實現反饋校正。
2 系統建模及應用
先利用本文第1章第2小節中所提的改進模糊聚類辨識算法對過熱汽溫系統的被控對象進行T-S模糊建模,再對辨識出的模糊模型線性化處理,處理之后的線性化模型成為適合于GPC的CARIMA模型,再將u加到過熱汽溫系統上[6],然后將系統的輸出在線反饋給廣義預測控制器,由此進行下一步的辨識和控制。建模完成之后給特定的階躍擾動,觀察系統輸出。
過熱汽溫控制系統結構圖如圖2所示。
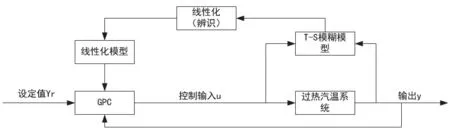
圖2 過熱汽溫控制系統結構圖Fig.2 Structure of superheated steam temperature control system
為了驗證本文所提出的算法具有可行性,對其進行MATLAB仿真。以某電廠的過熱汽溫模型G(s)=1.24/(1+178s)e-100s作為被控對象進行仿真研究,并與常規PID(Kp=1.25,Ki=0.5)串級控制對比來評估本文所用方法的性能,得到的仿真圖如圖3所示。
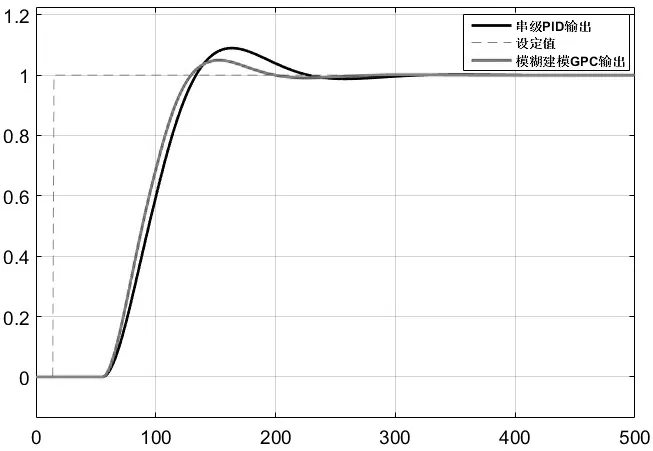
圖3 對比兩種控制方法示意圖Fig.3 Comparison of two control methods
由圖3可知,過熱汽溫控制系統采用基于T-S模糊建模的廣義預測控制算法,比常規PID串級控制具有更小的超調量和更快的調節速度,具有良好的動態特性。因此,本文所提出的方法具有一定的可行性,可以應用于工程實踐中。
3 結束語
本文首先對模糊建模和GPC算法進行了研究;其次,將聚類模糊T-S模型算法進行了簡化處理,每一次在線辨識都及時修正聚類半徑和隸屬度,這樣大大加快了模型的辨識速度也提高了模型的辨識精度;然后,將模糊建模與廣義預測控制相結合,應用于火電廠過熱汽溫控制系統中;最后,在MATLAB中仿真驗證算法的可行性,仿真結果表明在火電機組過熱汽溫控制系統應用中,基于T-S模糊建模的廣義預測控制比常見的PID串級控制有更好的控制性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19