三電平Boost電路動態前饋穩壓控制策略研究
2021-07-21 06:09:50楊培盛張潤澤郝帥曹虎何俊鵬
電氣傳動 2021年14期
關鍵詞:控制策略
楊培盛,張潤澤,郝帥,曹虎,何俊鵬
(1.濟南軌道交通集團有限公司,山東 濟南 250000;2.中車青島四方車輛研究所有限公司技術中心,山東 青島 266000)
近年來,Boost電路由于結構簡單、易于控制等優勢,廣泛應用于儲能系統、電動汽車、光伏系統、軌道交通等領域[1]。相較于兩電平Boost電路,三電平Boost可以采用載波移相調制策略,提高系統的等效開關頻率,起到減小濾波電感與濾波電容的作用。因此三電平Boost電路也逐漸在大功率場合應用開來。三電平Boost電路需要在全工況范圍內維持輸出電壓穩定,且保證輸出支撐電容中點電位平衡[2-4]。
對Boost電路而言,影響其輸出電壓穩定性主要有兩種因素:1)輸入電壓大范圍快速變化;2)電路負載突增突減。
為使Boost電路獲得優異的動態性能,已有大量學者進行了研究。文獻[5]針對雙向Buck-Boost電路,建立電路對輸入電壓的小信號傳遞函數,將輸入電壓引入到控制之中,并通過樣機驗證了該方法在電感電流連續模式的有效性。文獻[6]針對Boost電路在負載大范圍內變化時的電感電流斷續連續切換問題,建立了大信號模型并提出了改進型控制策略,通過實驗驗證了算法有效性。文獻[7]針對三電平Boost電路進行了小信號建模,指出了Boost電路為非最小相位系統,通過在傳遞函數中增加補償環節,增強了系統的穩定性,但該文章未針對具體的動態工況進行有效分析。文獻[8-9]針對現有三電平Boost電路進行控制優化,但都未針對實際工況中的輸入電壓變化進行討論。
本文將從Boost電路原理角度,說明Boost電路在輸入電壓大范圍快速變化時,輸出電壓無法快速響應的原因。基于此,提出一種基于電壓前饋的動態前饋控制策略,加快輸出電壓的動態響應,為防止動態控制過程導致的電路沖擊,本文進一步引入狀態機滯環判斷策略,令動態切換過程更加平滑。
本文第一部分將介紹三電平Boost電路的工作原理,分析在特定工況下,其輸出電壓動態響應較慢的原因。第二部分將介紹三電平Boost電路基于電壓外環與中點電位均壓環的基本控制方法,進而將動態前饋穩壓控制方法應用到上述雙環控制策略中,構成適用于負載與輸入電壓大范圍波動工況下的三電平Boost電路控制策略,該方法可以在保證輸出電壓動態性能的同時,令中點電位保持平衡。第三部分將通過不同工況下的仿真驗證上述控制策略的有效性。最后對全文做出總結。
1 三電平Boost電路工作原理
圖1為三電平Boost電路圖,其中Uin為輸入電壓;L為升壓電抗器;C1,C2為輸出電容;R為負載;Q1,Q2為開關管;D1,D2為二極管;U1,U2為電容C1,C2上的電壓;Uo為輸出電壓;Iin為電抗器電流。
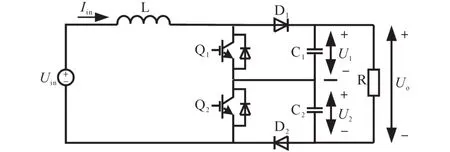
圖1 三電平Boost變換器拓撲圖Fig.1 Topology of three-level Boost converter
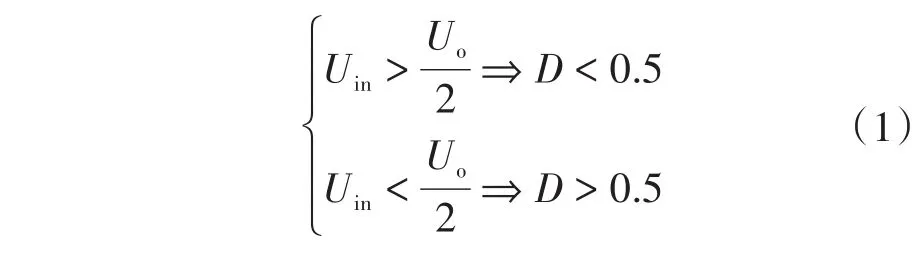
假設輸出電容電壓U1=U2=Uo/2,則根據輸入電壓Uin與輸出電壓Uo的關系,其開關管占空比D存在如下兩種情況:
當占空比D<0.5時,在一個開關周期內存在的工作模態如圖2所示。
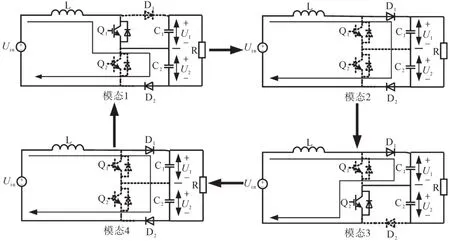
圖2 三電平Boost四個工作模態Fig.2 Four working modes of three-level Boost
1)模態 1:Q1導通,Q2關斷。此時電容 C1放電,C2充電。升壓電感上的電壓為Uin-U2,電感電流Iin呈線性上升;
2)模態2:Q1關斷,Q2關斷。此時電源對輸出電容和負載同時放電。升壓電感上的電壓為Uin-Uo,電感電流Iin呈線性下降;
3)模態 3:Q1關斷,Q2導通。此時電容 C2放電,C1充電。升壓電感上的電壓為Uin-U1,電感電流Iin呈線性上升;
4)模態4:Q1關斷,Q2關斷。此時工況與模態2完全相同。
當占空比D>0.5時,一個開關周期內工作模態和圖2相比,Q1,Q2同時關斷的工況不會出現,但會增加Q1,Q2同時導通的工況,此情況下電路的對外特性不發生變化,在此不做展開分析。
若占空比D<0.5,根據圖2所示工作模態,可以得到模態1情況下,電感電流增量:

式中:Ts為開關管工作周期。
在模態2情況下,電感電流下降量為

在連續模式下,電感電流動態值相等,即

將式(2)、式(3)代入到式(4)整理可得:

式(5)是在D<0.5條件下推導得出,在占空比D>0.5工況下,其輸入輸出電壓關系式不變。
由式(5)可以看出,為保證輸出電壓一定,當輸入電壓大范圍變化時,要求占空比保持快速跟隨變化。因此,當輸入電壓產生突變、控制環節無法快速跟隨占空比D的變化需求時,則會導致輸出電壓跟隨輸入電壓變化趨勢產生震蕩。而在輸入輸出電壓一定、負載變化時,理論上不會影響開關管占空比的變化,但實際上,負載變化的動態過程,需要電感電流上的瞬時平均值發生變化,因此依然需要開關管占空比的配合,而此動態過程不需要占空比D的大范圍變化,所以常規控制方式即可滿足要求[2,10-11]。
綜上所述,本文重點針對輸入電壓的快速變化來討論控制策略的優化。
2 三電平Boost電路動態前饋穩壓控制策略
本節第一部分將首先介紹三電平Boost電路現有控制方法,第二部分將在此基礎上,針對系統動態響應提出優化控制策略。
2.1 電壓外環與均壓環雙環控制策略
由圖2所示的三電平Boost電路工作模態可知,在理想電路基礎上,當Q1,Q2占空比完全相同時,兩個輸出電容電壓值也會完全相同,當開關管占空比存在一定偏差時,輸出電容電壓也會產生相應偏差,即開關管Q1動作會影響電容C2上的電壓,開關管Q2的動作會影響C1上的電壓。根據上述原理,可以在兩個開關管占空比之和不變的情況下,通過采集輸出電容上的電壓差值來調整兩個占空比,實現中點電位平衡。基于電壓外環與電容均壓環的雙環控制策略如圖3所示。
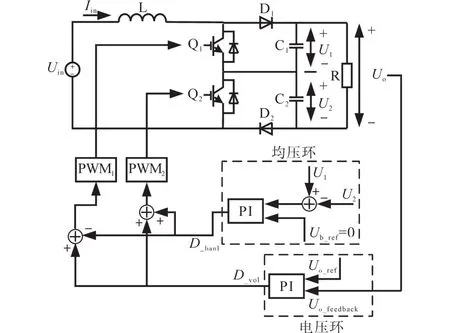
圖3 三電平Boost控制框圖Fig.3 The control block diagram of three level Boost
圖3中首先利用輸出電壓Uo_ref與電壓目標值Uo_feedback比較形成電壓外環,其輸出D_vol作為開關管占空比給定的基值,其次通過對兩個輸出電容C1,C2電壓U1,U2采樣,其差值與基值Ub_ref進行比較后,通過PI控制器形成均壓環,輸出為開關管占空比調整值D_banl。將D_vol-D_banl送入比較器PWM1,生成驅動信號控制開關管Q1,將D_vol+D_banl送入比較器PWM2,生成驅動信號控制開關管Q2[4,12]。
2.2 動態前饋穩壓控制策略
2.1節所示控制策略,在Boost電路進入電感電流連續模式下,且輸入電壓波動較小時,可以有效應對負載變化引起的輸出電壓波動。但當電路輸入電壓大范圍波動時,則無法保證輸出電壓的穩定。
結合第1節中的輸入、輸出電壓關系可知,在電路從一個穩態由動態過渡到另一個穩態的過程,實質上是調節開關管占空比從一個穩態值到另一個穩態值的過程。當中間動態過程持續時間過長,控制環節調節速度過慢時,則會出現輸出電壓無法快速跟隨指令值的情況。由于當輸入電壓進入穩態、并且輸出電壓目標值已知時,可以依據式(5)事先預知穩態下開關管的占空比,因此在圖3所示控制框架中,可以依據電路狀態,將輸入電壓引入控制策略中,對電路的動態過程進行獨立控制,將穩態占空比提前輸入到電路的控制環節中,以此來加快電路的動態響應。
為實現動態過程的平滑切換,本文在動態前饋過程中,引入狀態機對動態前饋控制與閉環控制的切換進行狀態判斷,防止動態控制時,占空比的階躍變化引起電路震蕩。將動態前饋穩壓策略引入到現有控制策略中,得到新的控制框架如圖4所示。
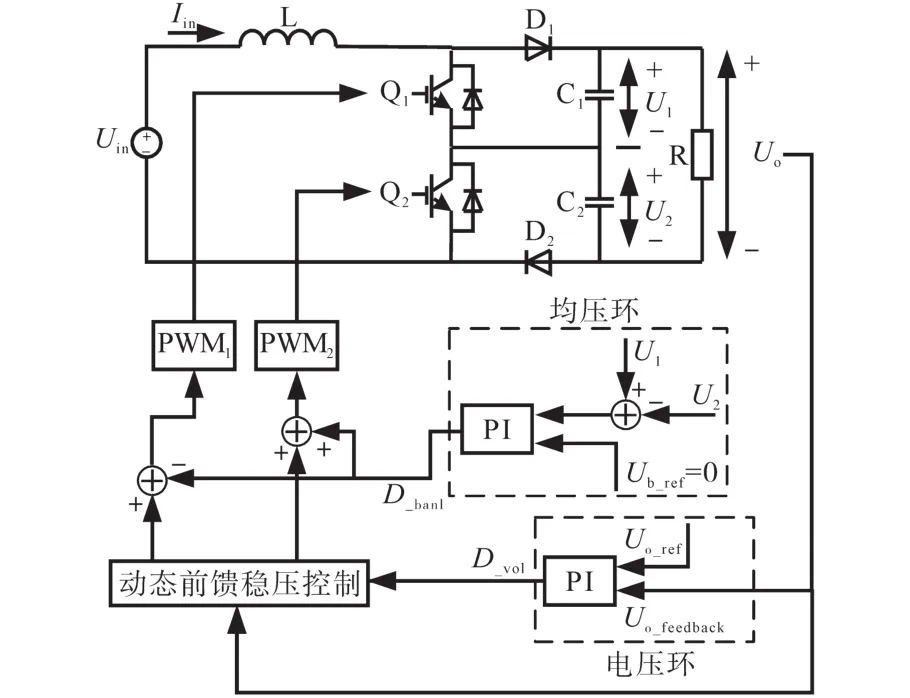
圖4 帶動態前饋穩壓策略的控制框圖Fig.4 Control block diagram with dynamic feedforward voltage-stabilized control strategy
圖4中動態前饋部分以檢測輸出電壓變化情況作為判斷啟動基準,只有當輸出電壓變化超過給定變化范圍時,才介入控制,加快動態響應。動態前饋穩壓策略如圖5所示。
圖5分兩種工況展示了動態前饋控制策略的工作方式,第一部分為輸入電壓突降工況,第二部分為輸入電壓突升工況。本小節只對第一部分進行展開討論,第二種工況與第一部分相似。
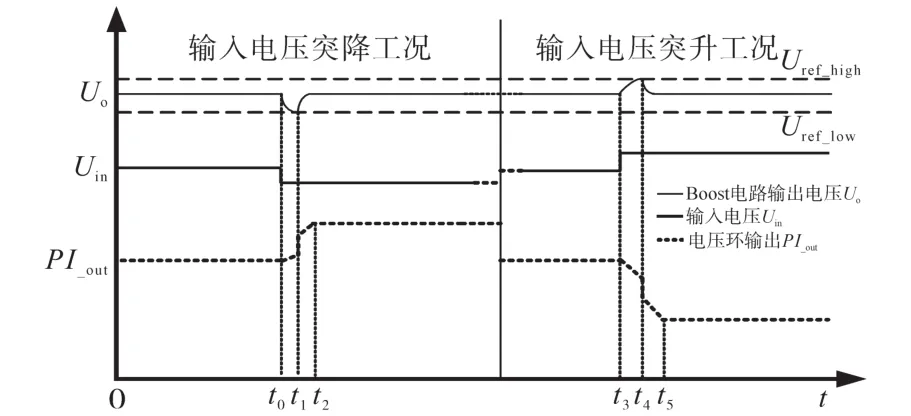
圖5 動態前饋穩壓策略Fig.5 Dynamic feedforward voltage-stabilized control strategy
1)0~t0時刻,輸入電壓為Uin,此時電路工作在穩態工況;
2)t0~t1時刻,輸入電壓突降,由于系統PI控制環節無法快速增大開關管占空比,導致輸出電壓下跌;
3)t1~t2時刻,當輸出電壓在t1時刻跌落至Uref_low時,動態前饋控制介入控制環節,根據式(5)計算出占空比D_cal替換電壓環節的PI輸出參與控制,為防止由于開關管占空比大范圍變化對系統造成沖擊,在初次給定時,將電壓環PI輸出給定為mD_cal,其中m為動態前饋給定系數且有m<1,后續電壓環PI給定由mD_cal逐步步進到D_cal;
4)t2時刻以后,輸出電壓恢復到穩態值,動態前饋穩壓控制退出,切換回閉環控制策略。
在整個閉環—動態前饋—閉環的動態控制過程中,由狀態機實現不同控制方法間的切換,其切換策略如圖6所示。
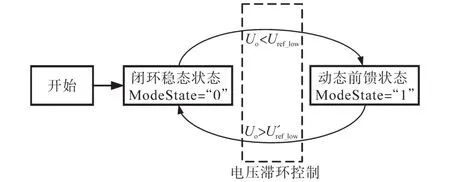
圖6 狀態機切換策略Fig.6 Mode sate switch strategy
在進入穩態控制后,需要由狀態機實時判斷輸出電壓條件,當電壓低于給定值Uref_low時,狀態機通過置位將算法切換為動態前饋狀態,當輸出電壓逐漸提升,大于給定值時U'ref_low,狀態機恢復,切換回閉環控制狀態。各給定值有如下關系:

綜上所述,通過狀態機切換以及算法間的配合,實現動態過程的快速響應。
當輸入電壓的突升引起輸出電壓變化時,仍然通過上述策略進行電壓校正,只是狀態機判斷條件及動態前饋控制給定值需要進行相應的調整,在此不再展開討論。
3 仿真與實驗驗證
3.1 仿真驗證
為驗證上述控制策略可行性,本文在Matlab仿真環境下,搭建了三電平Boost電路進行輸入電壓波動測試,其中輸入電壓穩態值1 500 V,輸出電壓穩態值2 000 V,額定功率120 kW,開關頻率3 kHz,并采用三電平Boost載波移相調制方法來降低輸出電容紋波。
當輸入電壓在1 200 V—1 500 V—1 800 V波動,在未采用動態電壓前饋穩壓策略時,輸出電壓及輸入電感電流如圖7所示。
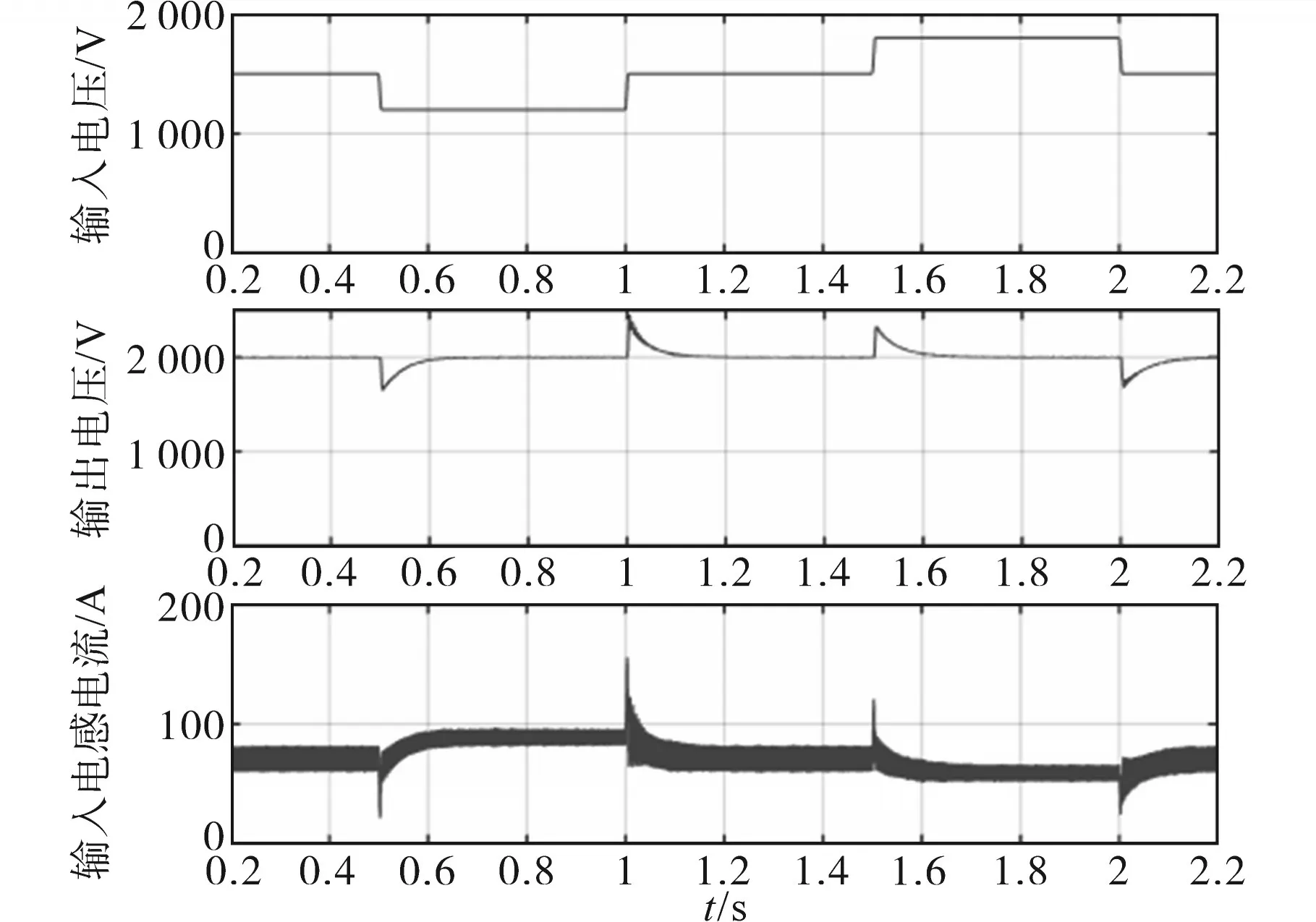
圖7 輸入波動工況下仿真結果Fig.7 Simulation results under input voltage fluctuation
圖7中,從上至下分別為Boost電路輸入電壓波形、Boost電路輸出電壓波形及輸入電感電流波形。
由圖7可以看出,輸出電壓跟隨輸入電壓變化產生了大范圍波動情況,變化范圍為(2 000±300)V,且電感電流在輸入電壓突變時,產生了震蕩,無法平滑過渡。
在采用動態前饋穩壓策略時,輸出電壓及輸入電感電流如圖8所示。圖8中三個波形仿真結果與圖7一致。由圖7、圖8仿真結果可知,采用新型控制方法后,輸出電壓動態震蕩明顯減小,變化范圍為(2 000±50)V,且輸入電流在動態期間更加平滑,證明了本文提出的控制方案的有效性。
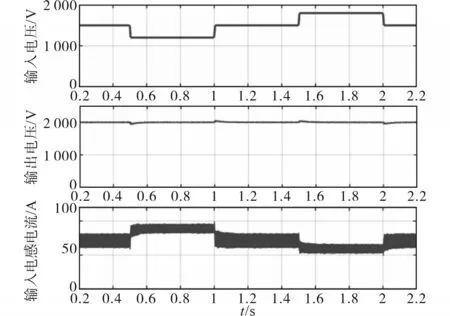
圖8 動態前饋穩壓控制時輸入電壓波動工況下仿真結果Fig.8 Simulation results under input voltage fluctuation with dynamic feedforward voltage-stabilized control strategy
3.2 實驗驗證
搭建了額定輸入1 500 V,輸出2 000 V的Boost穩壓電路,采用24脈波二極管整流機組供電,直流母線上可帶多路變流器進行試驗,且與實驗室牽引電機逆變器共用直流電源。實驗室電源使用示意圖如圖9所示。
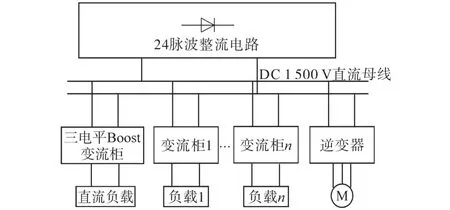
圖9 實驗室供電環境示意圖Fig.9 Schematic diagram of laboratory power supply environment
當牽引電機進行制動實驗時,會將直流電源電壓抬升至1 800 V,借此來考察Boost電路穩壓特性。在采用動態電壓前饋穩壓策略時,實驗波形如圖10~圖12所示,上側波形為Boost輸出電壓波形,下側波形為Boost電路輸入電壓波形。
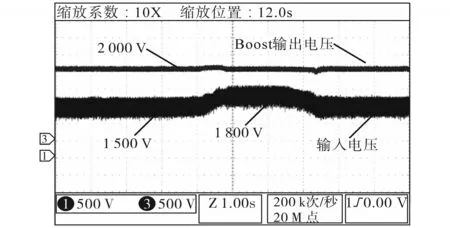
圖10 輸入電壓波動工況下實驗結果Fig.10 Experiment results under input voltage fluctuation
隨著實驗室中牽引電機的制動,輸入電壓從1 500 V被抬升到1 800 V,當制動結束時,輸入電壓逐漸回落到1 500 V,整個實驗過程如圖10所示。
從圖11可以看出,在輸入電壓被抬升時,Boost輸出電壓隨之上升,該過程是由于Boost開關管占空比無法快速響應所導致,當Boost輸出電壓上升到大于圖5所示的Uref_high時,動態前饋穩壓控制介入,將輸出電壓迅速穩定在輸出電壓目標值2 000 V附近。相似的,如圖12所示,當輸入電壓從1 800 V開始回落,輸出電壓下降至圖5所示的Uref_low時,動態前饋穩壓策略介入,迅速將輸出電壓抬升至目標值附近。
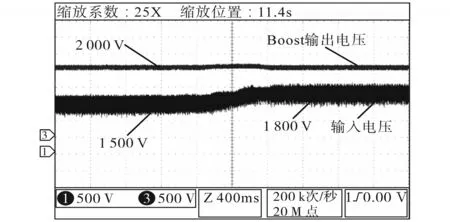
圖11 輸入電壓升壓工況下實驗結果Fig.11 Experimental results under input voltage rise

圖12 輸入電壓下降工況下降實驗結果Fig.12 Experimental results under input voltage drop
由圖10~圖12試驗結果可以看出,在輸入電壓大范圍變化時,輸出電壓可以有效地穩定在(2 000±50)V范圍內,與仿真結果一致,證明了動態電壓前饋穩壓控制策略的有效性。
4 結論
本文通過理論分析指出三電平Boost電路輸出電壓在特定工況下響應速度較慢,主要是由于開關管占空比無法快速響應導致,進而根據三電平Boost電路輸入輸出電壓與占空比的關系,在現有電壓外環與電容均壓控制環雙環控制策略基礎上,提出一種在動態過程適用的動態電壓前饋穩壓控制策略,并在動態前饋與閉環算法切換過程中引入狀態機判斷條件,使算法間的切換更為平滑。最后,通過仿真與實驗證明了針對寬電壓輸入的動態前饋穩壓策略的有效性。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
