基于MHMM的導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障智能診斷
2021-07-20 04:02:38羅進(jìn)海馬輝輝蔣會明
制導(dǎo)與引信 2021年1期
羅進(jìn)海, 張 樂, 馬輝輝, 朱 駿, 蔣會明
(1.上海理工大學(xué),上海200093;2.上海無線電設(shè)備研究所,上海201109)
0 引言
隨著現(xiàn)代科技的迅速發(fā)展,機(jī)械設(shè)備逐漸朝著復(fù)雜化、精密化和高度自動化方向發(fā)展,其運(yùn)行可靠性與安全性問題得到了研究學(xué)者越來越多的關(guān)注。導(dǎo)引頭伺服機(jī)構(gòu)是導(dǎo)彈實(shí)現(xiàn)目標(biāo)跟蹤和視線軸穩(wěn)定功能的重要執(zhí)行機(jī)構(gòu),對于實(shí)現(xiàn)和保障導(dǎo)彈既定性能起重要作用[1]。導(dǎo)引頭伺服機(jī)構(gòu)結(jié)構(gòu)精細(xì)、復(fù)雜、易損,服役環(huán)境惡劣,機(jī)械結(jié)構(gòu)的任何微小故障都有可能降低導(dǎo)彈性能,引發(fā)難以估計的后果。因此,導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障診斷具有迫切的工程需求與重要的實(shí)際意義。
導(dǎo)引頭伺服機(jī)構(gòu)運(yùn)行工況復(fù)雜,伺服機(jī)構(gòu)的監(jiān)測信號具有強(qiáng)非線性、非平穩(wěn)與強(qiáng)噪聲干擾的特點(diǎn)。基于傳統(tǒng)的時頻域分析的故障診斷方法遭遇重重阻礙,基于機(jī)器學(xué)習(xí)的方法成為解決該問題的主要途徑。隱馬爾可夫模型(hidden Markov model,HMM)作為一種時序統(tǒng)計概率模型,具有隱狀態(tài)鏈與觀測序列鏈雙重隨機(jī)屬性,在設(shè)備狀態(tài)監(jiān)測和早期微弱故障診斷領(lǐng)域應(yīng)用廣泛。“機(jī)械故障發(fā)于內(nèi),而形于外”,機(jī)械設(shè)備的微小故障狀態(tài)雖然難以直接從其外在表現(xiàn),如振動、聲音和溫度等變化來判斷,但卻是其外在表現(xiàn)發(fā)生微不可見的變化的根本原因。這與隱馬爾可夫模型具有的觀測序列鏈與隱狀態(tài)鏈的雙鏈屬性在本質(zhì)上是相通的。因此,HMM非常適合用于導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障的智能診斷。
OCAK等[2]提取軸承運(yùn)行狀態(tài)振動信號特征值矩陣,構(gòu)建 HMM 實(shí)現(xiàn)故障診斷。PURUSHOTHAM等[3]將離散小波變換和HMM相結(jié)合,成功實(shí)現(xiàn)軸承的多故障分類。DONG等[4]將隱半馬爾可夫模型用于泵的故障診斷和壽命預(yù)測研究。劉韜等[5]提出基于核主成分分析和耦合隱馬爾可夫模型的軸承多通道融合故障診斷方法。袁洪芳等[6]則將HMM與改進(jìn)距離測度法相結(jié)合,有效識別齒輪箱軸不對中、斷齒、磨損等多種故障模式。
本文針對導(dǎo)引頭伺服機(jī)構(gòu)多通道監(jiān)測數(shù)據(jù)特點(diǎn),引入多鏈隱馬爾可夫模型(multi-chain hidden Markov model,MHMM)。基于 MHMM 的多觀測序列鏈、單隱狀態(tài)鏈的動態(tài)網(wǎng)絡(luò)結(jié)構(gòu),同步智能提取多通道數(shù)據(jù)所蘊(yùn)含的多維統(tǒng)計特征規(guī)律,實(shí)現(xiàn)對機(jī)械設(shè)備故障狀態(tài)的精確表征,并基于伺服機(jī)構(gòu)機(jī)械故障試驗(yàn)數(shù)據(jù)驗(yàn)證所提方法的有效性。
1 基本原理
特征提取方法和機(jī)器學(xué)習(xí)方法涉及機(jī)械故障智能診斷的關(guān)鍵步驟與核心理論。針對導(dǎo)引頭伺服機(jī)構(gòu)監(jiān)測信號的特點(diǎn),結(jié)合多測點(diǎn)多通道采樣的工程實(shí)際,引入基于時域統(tǒng)計特征的特征提取方法和多鏈隱馬爾可夫模型這一統(tǒng)計概率模型。
1.1 時域統(tǒng)計特征提取
時頻域信號處理與特征提取技術(shù)的發(fā)展為監(jiān)測信號特征提取提供了豐富的途徑。然而,導(dǎo)引頭伺服機(jī)構(gòu)監(jiān)測信號強(qiáng)非線性、非平穩(wěn)和強(qiáng)噪聲干擾的特點(diǎn),導(dǎo)致時頻域特征的提取受到噪聲、工況等非線性因素與多參數(shù)優(yōu)化方法的制約。因此,計算簡單的時域統(tǒng)計特征提取方法在工程實(shí)際中常被作為表征設(shè)備運(yùn)行狀態(tài)的監(jiān)測指標(biāo)。
工程中常用的時域統(tǒng)計特征分為兩類:有量綱參數(shù)指標(biāo)和無量綱參數(shù)指標(biāo)。其中,典型的有量綱參數(shù)指標(biāo)(如均值、標(biāo)準(zhǔn)差、方根幅值、均方根值、峰值)對數(shù)據(jù)變化極其敏感,但會受到設(shè)備運(yùn)行工況的干擾;而無量綱參數(shù)指標(biāo)(如峭度指標(biāo)、波形指標(biāo)、峰值指標(biāo)、脈沖指標(biāo)、裕度指標(biāo))具有對信號幅值及頻率變化不敏感的特點(diǎn)[7]。在10個常用的時域統(tǒng)計特征中,峰值、峭度指標(biāo)、波形指標(biāo)、峰值指標(biāo)、脈沖指標(biāo)等對機(jī)械設(shè)備的早期沖擊故障比較敏感,而均方根值和波形指標(biāo)等則可以實(shí)現(xiàn)對機(jī)械設(shè)備退化過程的穩(wěn)定表征。本文在導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障智能診斷中,將有量綱及無量綱參數(shù)指標(biāo)共同作為故障特征進(jìn)行提取,各特征參數(shù)計算公式如表1所示。
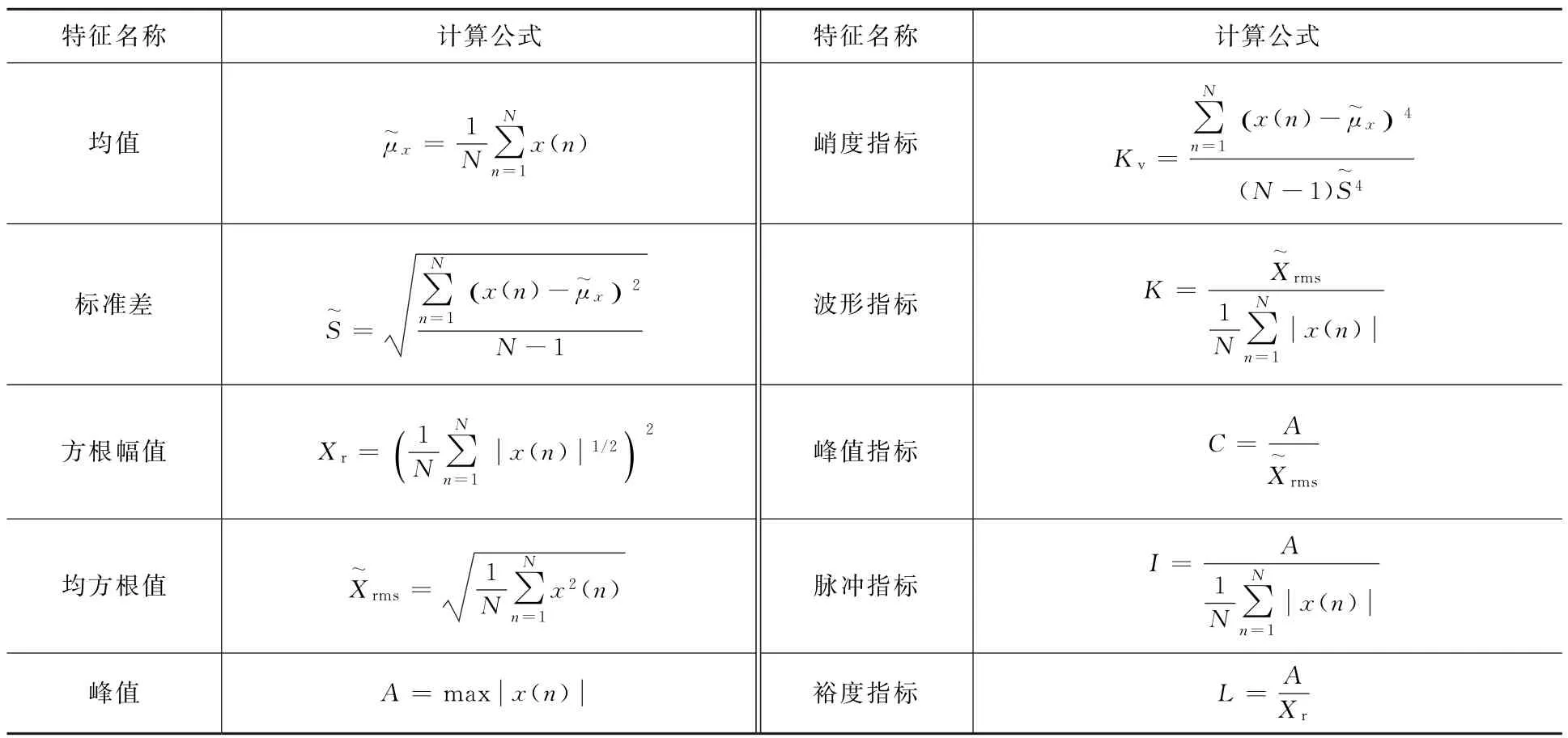
表1 時域統(tǒng)計特征計算公式
1.2 MHMM基本原理
導(dǎo)引頭伺服機(jī)構(gòu)運(yùn)行工況復(fù)雜,測試干擾因素眾多,即使是同一種故障狀態(tài)也常常表現(xiàn)出不同的外在征兆。因此,僅依靠單一通道監(jiān)測數(shù)據(jù)難以得到準(zhǔn)確的診斷結(jié)果。為此,本文基于多鏈馬爾可夫模型來智能融合多通道數(shù)據(jù),獲得監(jiān)測數(shù)據(jù)所表征的底層特征規(guī)律,為導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障診斷提供可靠依據(jù)。
HMM是一個典型的統(tǒng)計概率模型,具有符合Markov性質(zhì)的隱狀態(tài)鏈和隨機(jī)分布的觀測值序列鏈的雙隨機(jī)鏈結(jié)構(gòu)。通常,典型的HMM可以表示為

式中:N為模型的隱狀態(tài)數(shù)目,記模型的N個隱狀態(tài)為S1,S2,…,S N,q t∈{S1,S2,…,S N}為t時刻模型所處的狀態(tài);M為每個隱狀態(tài)可能的觀測值數(shù)目,記M個觀測值為v1,v2,…,v M,t時刻的觀測值為o t,則有o t∈{v1,v2,…,v M};π={πi,1≤i≤N}為初始狀態(tài)概率向量,其中πi=P(q t=S i),P(·)表示概率分布函數(shù);A=[a i,j]為狀態(tài)轉(zhuǎn)移概率矩陣,其中a i,j=P(q t+1=S j|q t=S i),1≤i,j≤N;B=[b j,k(o t)]為觀測值概率矩陣,其中b j,k(o t)=P(o t=v k|q t=S i),1≤j≤N,1≤k≤M。
由于工程中實(shí)際采集到的多為連續(xù)信號的離散值,因此常采用混合高斯分布(Gaussian mixed model,GMM)來擬合不同狀態(tài)下的觀測值概率。另外,導(dǎo)引頭伺服機(jī)構(gòu)采樣數(shù)據(jù)涉及多通道采樣,需采用多觀測值序列的MHMM來擬合觀測數(shù)據(jù)的分布規(guī)律。MHMM的貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,其中,C為觀測序列的鏈條數(shù),T為最大時刻。
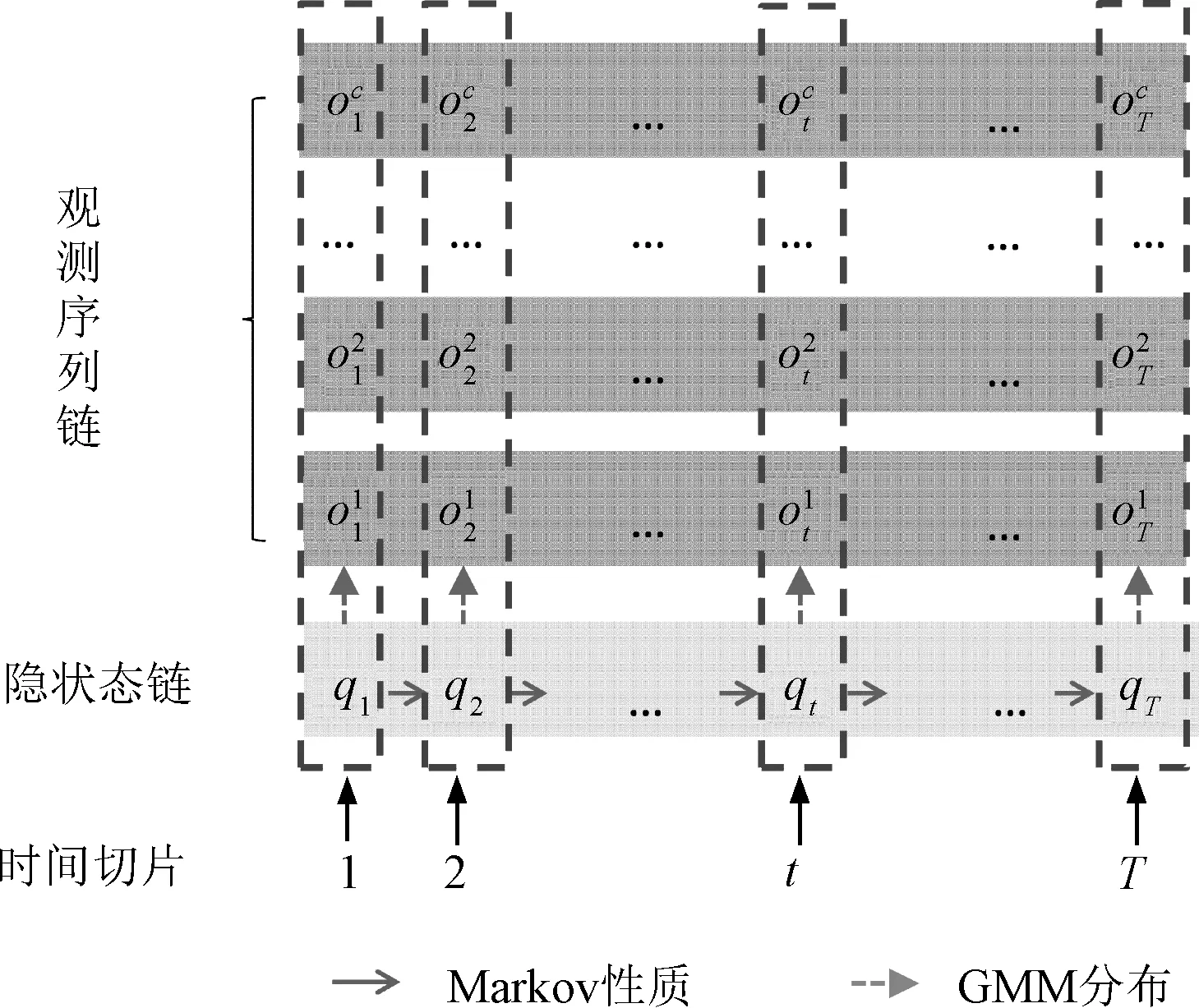
圖1 MHMM的貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)圖
圖1中,MHMM包含觀測序列鏈與隱狀態(tài)鏈兩部分,其中觀測序列鏈由多條組成。每個隱狀態(tài)下的多元觀測序列服從GMM分布,隱狀態(tài)鏈具有Markov性質(zhì),每一個時間切片內(nèi)的多通道數(shù)據(jù)依賴于同一個隱狀態(tài)參數(shù)。這與設(shè)備的故障機(jī)理是相通的,雖然不同通道對設(shè)備狀態(tài)的表征不同,但是他們都是設(shè)備同一個故障狀態(tài)的表征。因此,MHMM具有多通道信息融合的能力,非常適合用于導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障的多通道融合診斷。另外,MHMM應(yīng)用中所涉及的3種經(jīng)典算法在文獻(xiàn)[8]中已有詳細(xì)說明,此處不再贅述。
2 基于MHMM的多通道融合智能故障診斷
故障診斷是一個模式識別的過程,它將采集的數(shù)據(jù)或提取的特征映射為設(shè)備的故障類型。基于MHMM的多通道融合故障診斷分為離線訓(xùn)練和在線測試兩大部分,具體包含數(shù)據(jù)采集、特征提取、MHMM訓(xùn)練以及故障診斷等4個基本步驟,對應(yīng)故障診斷流程如圖2所示。其中,λi(i=1,2,…,I)為訓(xùn)練得到的 MHMM,I為模型數(shù)量;為待測設(shè)備在模型λi中的輸出似然概率。
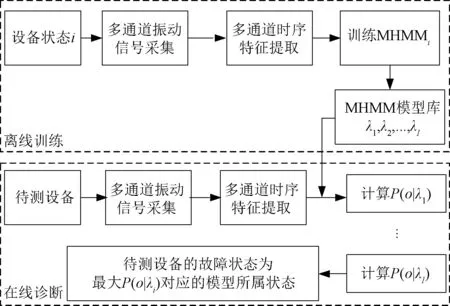
圖2 基于MHMM的多通道融合智能故障診斷流程
在離線訓(xùn)練時,針對每一種設(shè)備狀態(tài)(正常與各種故障狀態(tài))分別訓(xùn)練一個MHMM模型,具體步驟為:
a)數(shù)據(jù)采集,分別通過多個傳感器采集每種故障狀態(tài)下的多通道振動信號;
b)特征提取,將信號劃分為多個時窗信號,針對每個時窗信號分別提取時域統(tǒng)計特征向量,構(gòu)建多通道振動信號特征向量序列,得到MHMM訓(xùn)練所需的多通道觀測序列集;
c)HMM訓(xùn)練,基于Baum-Welch算法將提取的多通道特征向量序列輸入到MHMM中進(jìn)行參數(shù)估計,將得到的每種故障狀態(tài)的MHMM參數(shù)存入模型庫中。
在在線故障診斷環(huán)節(jié),首先對待測設(shè)備進(jìn)行數(shù)據(jù)采集和特征提取,得到多通道時序特征向量序列,將其輸入到模型庫中的各個MHMM中,計算各模型的輸出似然概率,其中輸出最大似然概率的模型對應(yīng)的故障狀態(tài)即為待測設(shè)備故障狀態(tài)。
3 工程案例分析
由于導(dǎo)引頭伺服機(jī)構(gòu)的精密緊湊性,包含多級齒輪傳動的內(nèi)置平臺相對齒弧回轉(zhuǎn)的俯仰通道易形成損傷。基于正常機(jī)構(gòu)(指結(jié)構(gòu)完好的機(jī)構(gòu))和局部損傷機(jī)構(gòu)的采樣數(shù)據(jù),驗(yàn)證基于隱馬爾可夫模型的導(dǎo)引頭伺服機(jī)構(gòu)機(jī)械故障智能診斷方法的有效性。
3.1 試驗(yàn)介紹
分別對兩套相同型號的導(dǎo)引頭伺服機(jī)構(gòu)進(jìn)行隨機(jī)振動試驗(yàn),其中一套為正常機(jī)構(gòu),一套為局部損傷機(jī)構(gòu)。導(dǎo)引頭伺服機(jī)構(gòu)簡化模型如圖3(a)所示。試驗(yàn)時,方位通道鎖死,在預(yù)定回路狀態(tài)下對伺服控制系統(tǒng)輸入三角波信號,分別驅(qū)動伺服機(jī)構(gòu)內(nèi)置俯仰框和齒弧,使俯仰通道以繞水平面±40°的三角波形式運(yùn)動。試驗(yàn)中的三角波信號主頻率分別設(shè)為0.2,0.3,0.4,0.5,0.6,1.0 Hz,6種伺服控制信號頻率對應(yīng)6種工況,采樣頻率設(shè)為1 024 Hz。在俯仰框傳動鏈末級,采用Co-Co-80振動數(shù)據(jù)采集器采集振動信號,測點(diǎn)位置如圖3(b)所示。共布置6個測點(diǎn)同步采樣,其中測點(diǎn)1、4和5向下,測點(diǎn)2和3向左,測點(diǎn)6位于軸向。正常機(jī)構(gòu)俯仰通道轉(zhuǎn)至下極限位置時有異響,可能在末級扇齒處有焊線時掉落的焊錫,方位通道齒弧處發(fā)現(xiàn)焊錫。
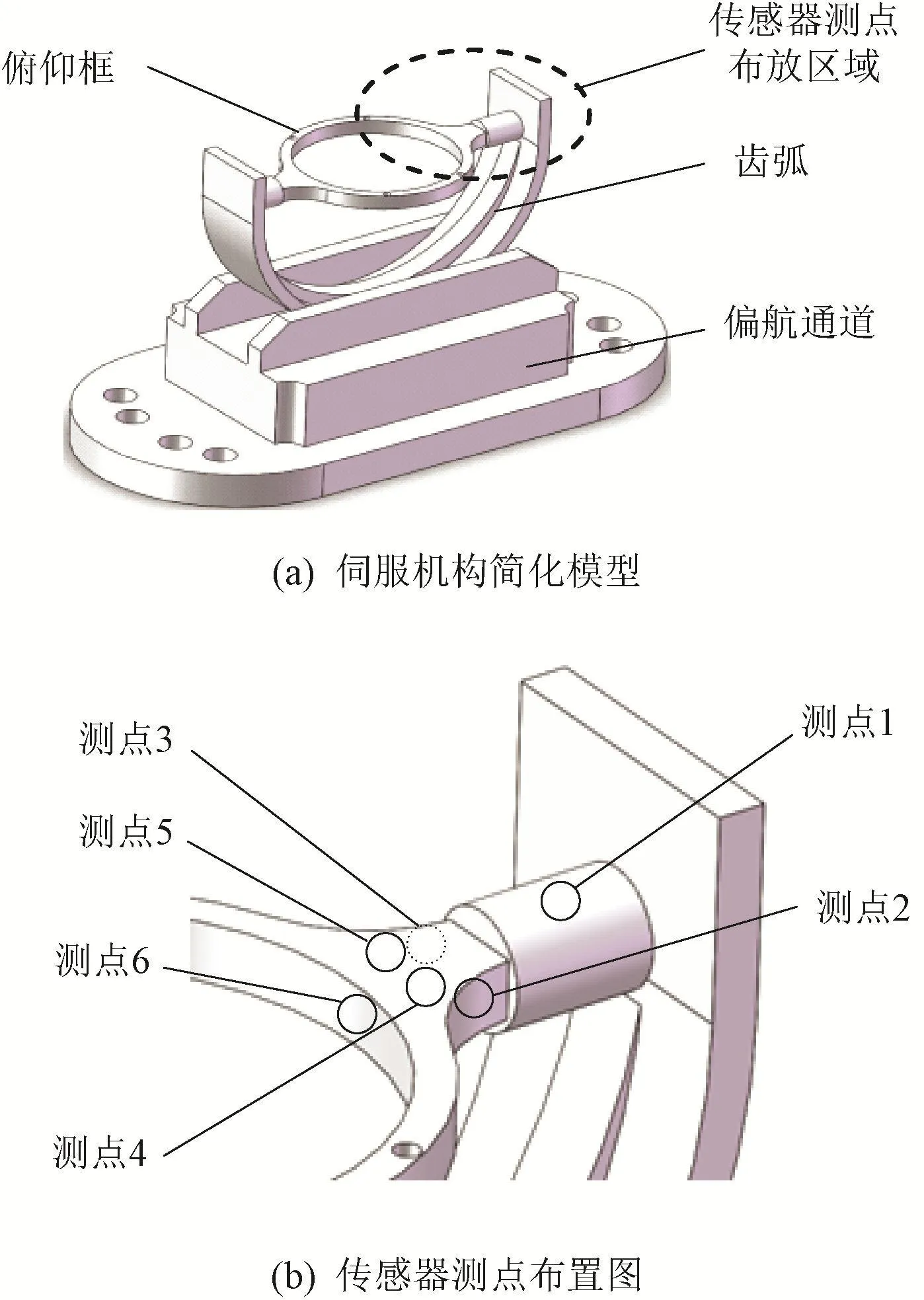
圖3 伺服機(jī)構(gòu)簡化模型及傳感器測點(diǎn)布放區(qū)域
3.2 數(shù)據(jù)分析
圖4為正常機(jī)構(gòu)0.2 Hz工況下測點(diǎn)1振動數(shù)據(jù)的時頻域圖。正常機(jī)構(gòu)的主特征頻率是轉(zhuǎn)頻及其二倍頻,其中二倍頻處的較大振幅對應(yīng)正常機(jī)構(gòu)俯仰通道轉(zhuǎn)至下極限位置處的異響情況。
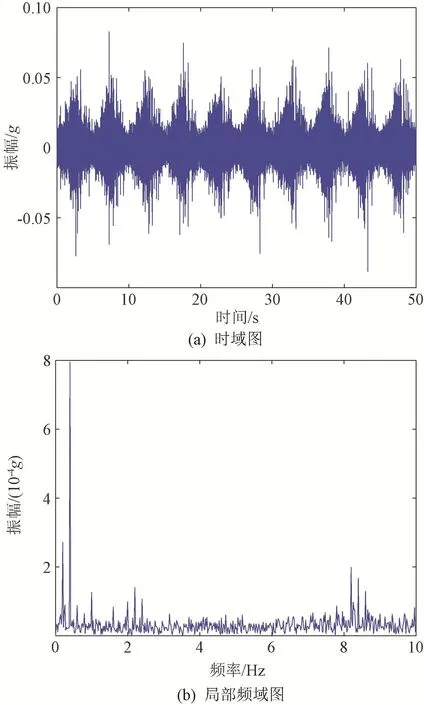
圖4 正常機(jī)構(gòu)0.2 Hz工況測點(diǎn)1振動時頻域圖
圖5為局部損傷機(jī)構(gòu)0.2 Hz工況下測點(diǎn)1振動數(shù)據(jù)的時頻域圖。局部損傷機(jī)構(gòu)的振動頻譜呈現(xiàn)為轉(zhuǎn)頻及其多階倍頻,難以從頻譜圖中找到對應(yīng)的故障頻率成分。經(jīng)典的時頻分析方法,如經(jīng)驗(yàn)?zāi)B(tài)分解[9]或變分模態(tài)分解[10]等,亦難以有效地提取出所需固有模態(tài)。因此,直接基于信號分析的故障診斷方法難以實(shí)現(xiàn)對導(dǎo)引頭伺服機(jī)構(gòu)故障的有效診斷。
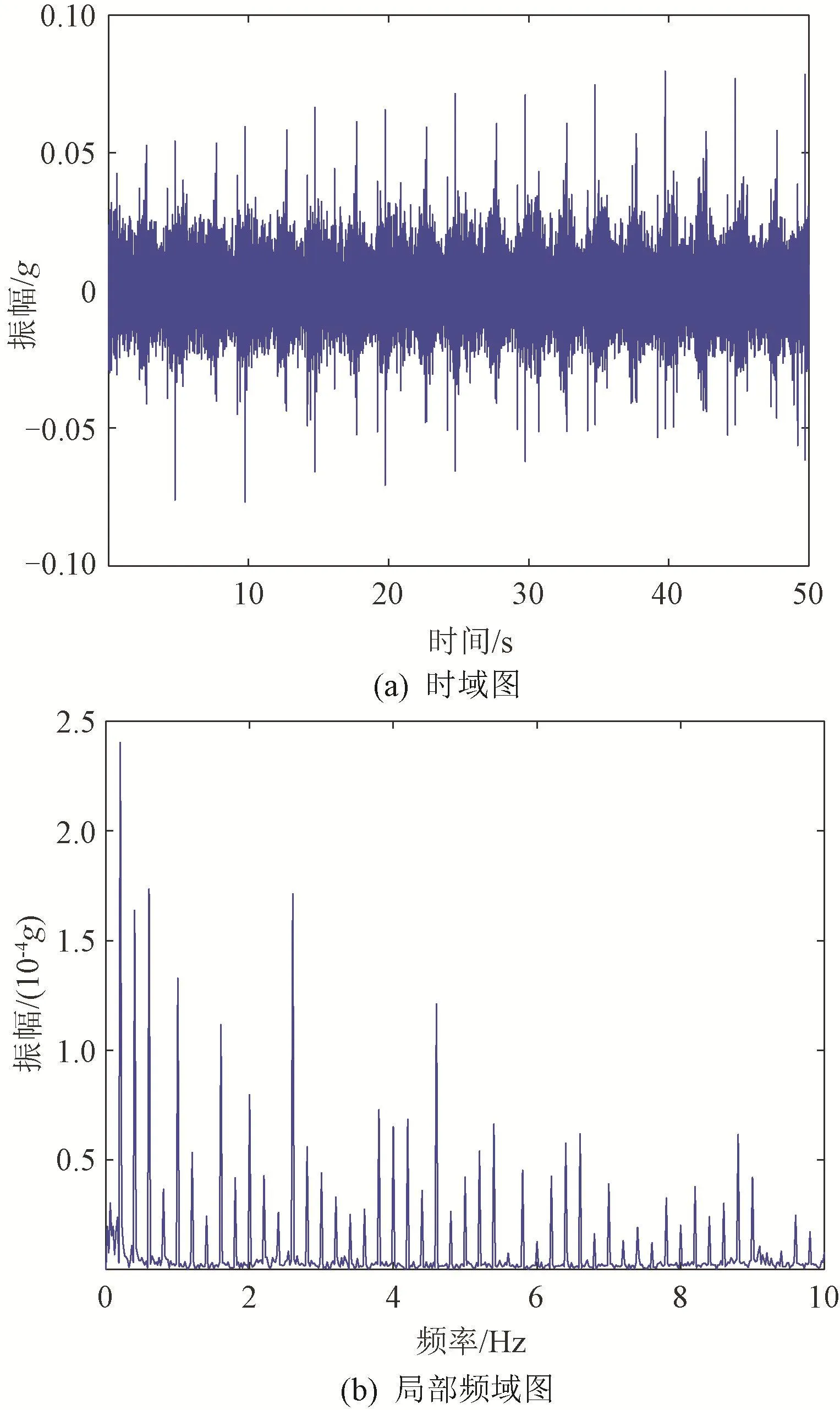
圖5 局部損傷機(jī)構(gòu)0.2 Hz工況下測點(diǎn)1振動時頻域圖
3.3 智能診斷結(jié)果分析
在多通道信號特征提取環(huán)節(jié),首先,將正常機(jī)構(gòu)和局部損傷機(jī)構(gòu)的多通道振動信號分別進(jìn)行分段處理,每個采樣通道的每次采樣分為10個時窗;然后,針對每個時窗分別提取10個常見時域統(tǒng)計特征;最終形成6個通道10個連續(xù)時窗的10維時域統(tǒng)計特征向量庫。試驗(yàn)中針對正常機(jī)構(gòu)和局部損傷機(jī)構(gòu)分別提取了100個樣本,各隨機(jī)選取50個樣本作為訓(xùn)練數(shù)據(jù)集,剩余50個作為測試數(shù)據(jù)集。基于離線訓(xùn)練流程,采用訓(xùn)練數(shù)據(jù)集為每種工況下的正常狀態(tài)和局部損傷狀態(tài)分別構(gòu)建模型,建立導(dǎo)彈伺服機(jī)構(gòu)故障狀態(tài)模型庫。
將6種工況下的測試數(shù)據(jù)集分別輸入故障狀態(tài)模型庫,將其中輸出似然概率最大的模型所對應(yīng)的故障狀態(tài)作為被測機(jī)構(gòu)所處的故障狀態(tài)。6種工況下局部損傷機(jī)構(gòu)采樣數(shù)據(jù)在故障狀態(tài)模型庫中的測試結(jié)果如圖6所示。在所有工況下,測試數(shù)據(jù)在兩種不同故障狀態(tài)模型下的輸出似然概率差異十分明顯,診斷結(jié)果與真實(shí)情況相符。將正常機(jī)構(gòu)測試數(shù)據(jù)輸入到模型庫中進(jìn)行測試,同樣得到正確分類。結(jié)果表明,在不同工況下,正常機(jī)構(gòu)數(shù)據(jù)及局部損傷機(jī)構(gòu)數(shù)據(jù)的診斷準(zhǔn)確率都可以達(dá)到100%,本文所提方法可以有效實(shí)現(xiàn)不同工況下正常機(jī)構(gòu)與局部損傷機(jī)構(gòu)的智能診斷。
為進(jìn)一步驗(yàn)證基于MHMM的多通道融合故障診斷方法的有效性,基于6個測試通道數(shù)據(jù)分別做故障診斷。同樣50%數(shù)據(jù)用于模型訓(xùn)練,50%數(shù)據(jù)用于模型測試。不同工況下基于單通道采樣數(shù)據(jù)的平均診斷準(zhǔn)確率如表2所示。
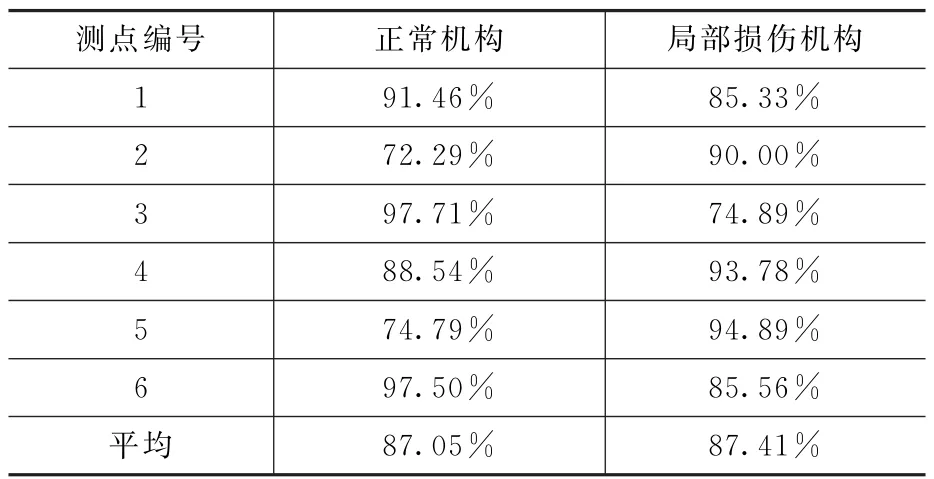
表2 單通道采樣數(shù)據(jù)平均診斷準(zhǔn)確率
由表2可知,利用不同測點(diǎn)的傳感器數(shù)據(jù)單獨(dú)進(jìn)行測試時,故障診斷的準(zhǔn)確率波動較大。且由于正常機(jī)構(gòu)俯仰框轉(zhuǎn)至下極限位置會有異響,在使用單傳感器測試時結(jié)果易受到干擾,導(dǎo)致診斷準(zhǔn)確率偏低。而MHMM的多鏈動態(tài)網(wǎng)絡(luò)結(jié)構(gòu)使其可以同步智能提取多通道觀測數(shù)據(jù)鏈背后所隱藏的統(tǒng)計規(guī)律,實(shí)現(xiàn)多通道信號的智能融合,有效降低單個通道中的干擾因素,提高智能診斷的正確率。
4 結(jié)論
針對導(dǎo)引頭伺服機(jī)構(gòu)結(jié)構(gòu)局部損傷難以基于傳統(tǒng)時頻域信號分析方法進(jìn)行有效診斷的問題,提出一種基于多鏈隱馬爾可夫模型的多通道特征融合機(jī)械故障智能診斷方法。MHMM具有多觀測序列鏈、單隱狀態(tài)鏈的動態(tài)網(wǎng)絡(luò)結(jié)構(gòu),能夠同步智能提取多通道數(shù)據(jù)所蘊(yùn)含的多維統(tǒng)計特征規(guī)律,實(shí)現(xiàn)對機(jī)械設(shè)備故障狀態(tài)的精確表征。基于MHMM的伺服機(jī)構(gòu)機(jī)械故障智能診斷方法實(shí)現(xiàn)了對導(dǎo)引頭伺服機(jī)構(gòu)正常與局部損傷狀態(tài)的有效診斷。同時,通過多通道信號融合前后對比試驗(yàn),驗(yàn)證了所提方法的優(yōu)越性,為導(dǎo)引頭伺服機(jī)構(gòu)健康狀態(tài)監(jiān)測與智能診斷應(yīng)用提供了有效途徑。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21