基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)
2021-07-19 02:36:30李約翰
集裝箱化 2021年4期
關(guān)鍵詞:檢測(cè)
李約翰


隨著港口向智慧化、智能化發(fā)展,龍門(mén)吊自動(dòng)化控制作為智慧港口的重要組成部分越來(lái)越受到港口企業(yè)的重視。寧波梅東集裝箱碼頭有限公司(以下簡(jiǎn)稱“梅東公司”)在龍門(mén)吊自動(dòng)化控制及安全生產(chǎn)方面研發(fā)多項(xiàng)新技術(shù),其中,基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)利用龍門(mén)吊遠(yuǎn)程控制系統(tǒng)的高清攝像機(jī)和視頻分析技術(shù),實(shí)現(xiàn)在大車前進(jìn)、后退及吊具下放過(guò)程中對(duì)人員和車輛的識(shí)別,聯(lián)動(dòng)龍門(mén)吊可編程邏輯控制器(programmable logic controller,PLC)控制龍門(mén)吊減速或停機(jī),聯(lián)動(dòng)大車監(jiān)控臺(tái)實(shí)現(xiàn)安全隱患提示功能,從而保障龍門(mén)吊作業(yè)安全。
1 基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)關(guān)鍵技術(shù)
基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)的核心技術(shù)是視頻識(shí)別技術(shù),其中包括深度學(xué)習(xí)和特征識(shí)別技術(shù):深度學(xué)習(xí)技術(shù)對(duì)識(shí)別目標(biāo)進(jìn)行樣本收集、分析和算法生成,主要功能是正向識(shí)別人員和車輛目標(biāo);特征識(shí)別技術(shù)主要對(duì)深度學(xué)習(xí)算法導(dǎo)致的誤報(bào)進(jìn)行反向識(shí)別,將人員和車輛以外的目標(biāo)以及與人員、車輛相似度較高的目標(biāo)排除在外。
1.1 深度學(xué)習(xí)技術(shù)
深度學(xué)習(xí)技術(shù)起源于人工神經(jīng)網(wǎng)絡(luò)研究,通過(guò)組合低層特征形成更加抽象的高層特征或類別,從而從大量的輸入數(shù)據(jù)中學(xué)習(xí)有效特征表示,并把這些特征用于分類、回歸和信息檢索。深度學(xué)習(xí)實(shí)際上是一種模仿人腦的學(xué)習(xí),含多隱層的多層感知器就是一種深度學(xué)習(xí)結(jié)構(gòu),通過(guò)組合低層特征形成更加抽象的高層類別或特征,以發(fā)現(xiàn)數(shù)據(jù)的分布式特征表示。
基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)應(yīng)用YOLO和RCNN深度學(xué)習(xí)技術(shù)。首先,采用選擇性搜索方法在視頻畫(huà)面中選取上千個(gè)可能出現(xiàn)物體的位置;然后,將分割出來(lái)的圖像修正為大小統(tǒng)一的區(qū)塊,放入卷積神經(jīng)網(wǎng)絡(luò)中提取特征,并將提取出來(lái)的特征放入支持向量機(jī)中分類;最后,對(duì)區(qū)塊的邊框做回歸分析,找到合適的位置。YOLO技術(shù)區(qū)別于RCNN技術(shù)的最主要特征是:前者同時(shí)訓(xùn)練并同時(shí)輸出位置和類別信息,其將圖片分為S譙個(gè)格子,每個(gè)格子檢測(cè)其內(nèi)物體,而當(dāng)物體中心在某個(gè)格子內(nèi)時(shí),這個(gè)格子就負(fù)責(zé)檢測(cè)這個(gè)物體。YOLO與RCNN深度學(xué)習(xí)算法的結(jié)合應(yīng)用可有效提高人員和車輛的識(shí)別率。
1.2 特征識(shí)別技術(shù)
特征識(shí)別技術(shù)采用提升的密集軌跡算法,根據(jù)目標(biāo)的形狀、紋理、亮度等特征,反向識(shí)別深度學(xué)習(xí)算法中出現(xiàn)的非人員和非車輛目標(biāo):當(dāng)深度學(xué)習(xí)算法認(rèn)為目標(biāo)為人員或車輛,而密集軌跡算法識(shí)別出目標(biāo)具有非人員和非車輛特征時(shí),目標(biāo)不觸發(fā)報(bào)警,從而有效降低目標(biāo)誤報(bào)率。
2 基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)結(jié)構(gòu)及工作流程
為了配合碼頭自動(dòng)化作業(yè),梅東公司部署龍門(mén)吊遠(yuǎn)程控制系統(tǒng),使龍門(mén)吊司機(jī)能夠在中控室通過(guò)觀察龍門(mén)吊上攝像機(jī)拍攝的視頻畫(huà)面遠(yuǎn)程操控設(shè)備作業(yè)。梅東公司原龍門(mén)吊遠(yuǎn)程控制系統(tǒng)使用毫米波雷達(dá)系統(tǒng)作為防撞預(yù)警檢測(cè)技術(shù)手段,存在一定檢測(cè)盲區(qū),并且人體檢測(cè)效果不佳。為此,增加基于視頻分析技術(shù)的人員和車輛檢測(cè)功能:當(dāng)檢測(cè)到人員或車輛時(shí),系統(tǒng)發(fā)出警報(bào)信號(hào),聯(lián)動(dòng)龍門(mén)吊PLC執(zhí)行大車急停、減速動(dòng)作或吊具停止動(dòng)作,大車安全監(jiān)護(hù)臺(tái)顯示警示視頻畫(huà)面并發(fā)出警報(bào),由安全監(jiān)控人員確認(rèn)是否存在安全隱患并處理警情,從而提高龍門(mén)吊運(yùn)行安全性。
2.1 系統(tǒng)結(jié)構(gòu)
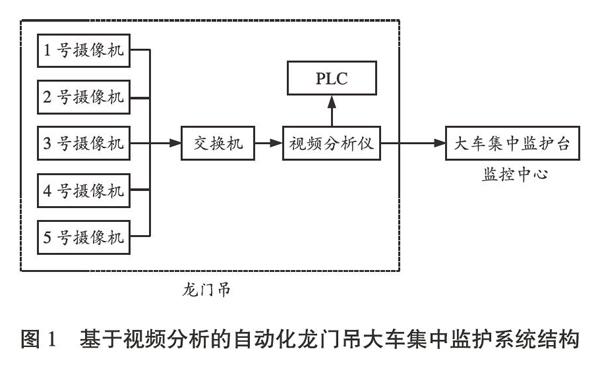
基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)由龍門(mén)吊遠(yuǎn)程控制系統(tǒng)攝像機(jī)、視頻分析儀、大車集中監(jiān)護(hù)臺(tái)等組成(見(jiàn)圖1)。龍門(mén)吊遠(yuǎn)程控制系統(tǒng)應(yīng)用高清網(wǎng)絡(luò)攝像機(jī),其中:門(mén)腿攝像機(jī)有4個(gè),小車架吊具云臺(tái)攝像機(jī)有1個(gè)。視頻分析儀由工控機(jī)、人員和車輛視頻識(shí)別系統(tǒng)組成,其中:工控機(jī)采用Linux系統(tǒng),配置視頻分析顯卡;人員和車輛視頻識(shí)別系統(tǒng)專門(mén)針對(duì)龍門(mén)吊運(yùn)行環(huán)境進(jìn)行優(yōu)化,適應(yīng)龍門(mén)吊遠(yuǎn)程控制系統(tǒng)攝像機(jī)的畫(huà)面視角,對(duì)碼頭區(qū)域內(nèi)人員和車輛具有較高的識(shí)別率及較低的誤報(bào)率。大車集中監(jiān)護(hù)臺(tái)可集中監(jiān)控龍門(mén)吊大車門(mén)腿攝像機(jī)和小車架攝像機(jī),配有專門(mén)的安全監(jiān)護(hù)人員,當(dāng)監(jiān)測(cè)到危險(xiǎn)警情時(shí),可控制單臺(tái)或全部龍門(mén)吊急停,從而有效降低安全事故發(fā)生率。
2.2 系統(tǒng)工作流程
基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)工作流程如圖2所示:PLC發(fā)送當(dāng)前龍門(mén)吊運(yùn)行狀態(tài)(包括大車向左、向右運(yùn)動(dòng)和吊具下放等)信息至PVAC防撞分析儀;PVAC防撞分析儀接收PLC發(fā)送的龍門(mén)吊運(yùn)行狀態(tài)信息,采集并分析對(duì)應(yīng)的攝像機(jī)(包括大車向右運(yùn)動(dòng)2個(gè)門(mén)腿攝像機(jī)、大車向左運(yùn)動(dòng)2個(gè)門(mén)腿攝像機(jī)和1個(gè)小車架攝像機(jī))視頻(見(jiàn)圖3)。
PVAC防撞分析儀采用人工智能視頻識(shí)別分析算法對(duì)視頻流進(jìn)行分析,并將警報(bào)信息分別發(fā)送給PLC和大車監(jiān)控臺(tái)視頻軟件,其中:減速警報(bào)發(fā)送至PLC和大車監(jiān)控臺(tái),緊停警報(bào)發(fā)送至PRCS大車監(jiān)控臺(tái)。若門(mén)腿攝像機(jī)在10~20 m區(qū)域內(nèi)識(shí)別到人員或車輛,向PLC發(fā)送大車減速警報(bào)信息;若門(mén)腿攝像機(jī)在0~10 m區(qū)域內(nèi)識(shí)別到人員或車輛,向PLC發(fā)送緊停警報(bào)信息;若小車架攝像機(jī)在吊具下方檢測(cè)區(qū)域內(nèi)檢測(cè)到人員,向PLC發(fā)送吊具停止下放的緊停警報(bào)信息(見(jiàn)圖4)。
PLC收到減速警報(bào)信息后,發(fā)送減速指令至龍門(mén)吊,降低大車運(yùn)行速度。大車集中監(jiān)護(hù)系統(tǒng)的大車監(jiān)控視頻軟件收到龍門(mén)吊減速警報(bào)信息后,警報(bào)視頻畫(huà)面顯示黃色邊框,并觸發(fā)音響警報(bào)(提示“前方有人”“前方有車”等)。大車監(jiān)控人員觀察報(bào)警攝像機(jī)視頻畫(huà)面:若確有警情,處理警情后按消警按鈕;若大車監(jiān)控人員確認(rèn)為誤報(bào)警,按誤報(bào)警按鈕(見(jiàn)圖5)。大車集中監(jiān)護(hù)系統(tǒng)的大車監(jiān)控視頻軟件收到龍門(mén)吊緊停警報(bào)信息后,對(duì)應(yīng)的警報(bào)視頻畫(huà)面顯示紅色邊框,同時(shí)驅(qū)動(dòng)網(wǎng)絡(luò)音響發(fā)出緊停警報(bào)提示音(提示“前方有人”“前方有車”“ 下方有人”等)。大車監(jiān)控人員觀察緊停報(bào)警攝像機(jī)視頻畫(huà)面:若確有警情,按緊停按鈕,使大車停止運(yùn)行或吊具停止下放,處理緊停警情后,按視頻軟件上的消警按鈕;若大車監(jiān)控人員確認(rèn)為誤報(bào)警,按誤報(bào)警按鈕(見(jiàn)圖6)。
PVAC防撞分析儀收到消警信息后,消除發(fā)送的警報(bào),繼續(xù)檢測(cè)攝像機(jī)拍攝的視頻畫(huà)面;PVAC防撞分析儀收到誤報(bào)警信息后,對(duì)當(dāng)前視頻畫(huà)面內(nèi)誤報(bào)警目標(biāo)不再重復(fù)報(bào)警。PVAC防撞分析儀向PLC發(fā)送心跳檢測(cè)信息,PLC將心跳檢測(cè)信息發(fā)送至數(shù)據(jù)視圖,由數(shù)據(jù)視圖顯示防撞系統(tǒng)工作狀態(tài)(見(jiàn)圖7)。PVAC防撞系統(tǒng)全程監(jiān)控并記錄每次報(bào)警事件及處理情況,記錄人員和車輛報(bào)警事件的時(shí)間、龍門(mén)吊編號(hào)、視頻截圖等,并保存報(bào)警錄像供追溯查詢。
3 基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)功能實(shí)現(xiàn)
自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)視頻分析儀的主要功能是采集并分析實(shí)時(shí)視頻畫(huà)面,檢測(cè)龍門(mén)吊運(yùn)行方向的門(mén)腿攝像機(jī)前方20 m區(qū)域內(nèi)是否有人員或車輛,以及小車架下方區(qū)域內(nèi)是否有人員,具體功能實(shí)現(xiàn)過(guò)程如下:(1)當(dāng)檢測(cè)到龍門(mén)吊運(yùn)行方向的門(mén)腿攝像機(jī)前方0~10 m區(qū)域內(nèi)有人員或車輛時(shí),向龍門(mén)吊PLC和大車集中監(jiān)護(hù)臺(tái)發(fā)送急停指令,使龍門(mén)吊停止運(yùn)行,同時(shí)大車集中監(jiān)護(hù)臺(tái)相關(guān)視頻畫(huà)面顯示急停警報(bào)信息,提示安全監(jiān)控人員有警情發(fā)生;(2)當(dāng)檢測(cè)到龍門(mén)吊運(yùn)行方向的門(mén)腿攝像機(jī)前方10~20 m區(qū)域內(nèi)有人員或車輛時(shí),向龍門(mén)吊PLC和大車集中監(jiān)護(hù)臺(tái)發(fā)送減速指令,使龍門(mén)吊降低運(yùn)行速度,同時(shí)大車集中監(jiān)護(hù)臺(tái)相關(guān)視頻畫(huà)面顯示減速警報(bào)信息,提示安全監(jiān)控人員有警情發(fā)生;(3)當(dāng)龍門(mén)吊吊具下放時(shí),檢測(cè)小車架攝像機(jī)視頻畫(huà)面的安全區(qū)域內(nèi)是否有人員,若檢測(cè)到人員,吊具停止下放。自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)中大車監(jiān)護(hù)臺(tái)的功能是對(duì)運(yùn)行中的龍門(mén)吊實(shí)施監(jiān)護(hù),當(dāng)檢測(cè)到不安全因素時(shí),安全監(jiān)控人員可按急停按鈕,使龍門(mén)吊停止運(yùn)行。
4 結(jié)束語(yǔ)
基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)利用多種視頻分析算法,大大提高算法識(shí)別率,滿足碼頭生產(chǎn)應(yīng)用要求。梅東公司在應(yīng)用基于視頻分析的自動(dòng)化龍門(mén)吊大車集中監(jiān)護(hù)系統(tǒng)的基礎(chǔ)上,結(jié)合毫米波檢測(cè)技術(shù)以及大車集中監(jiān)護(hù)臺(tái)安全監(jiān)控人員的實(shí)時(shí)監(jiān)護(hù),為龍門(mén)吊安全、高效作業(yè)提供有力保障。
(編輯:曹莉瓊 收稿日期:2021-04-09)
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
