基于線性霍爾誤差補(bǔ)償?shù)母咚儆来磐诫姍C(jī)轉(zhuǎn)子位置檢測(cè)技術(shù)
2021-07-14 02:04:40王曉琳劉思豪顧聰
電機(jī)與控制學(xué)報(bào) 2021年7期
關(guān)鍵詞:信號(hào)
王曉琳, 劉思豪, 顧聰
(南京航空航天大學(xué) 自動(dòng)化學(xué)院,南京 211106)
0 引 言
高速永磁同步電機(jī)(high-speed permanent magnet synchronous motor,HSPMSM)具有體積小、功率密度高、調(diào)速范圍廣、動(dòng)態(tài)性能好等優(yōu)點(diǎn),在工業(yè)和生活領(lǐng)域得到了廣泛應(yīng)用[1-4]。高速電機(jī)的性能依賴(lài)于精確的轉(zhuǎn)子位置[5]。傳統(tǒng)的轉(zhuǎn)子位置獲取方法包括光電編碼器、旋轉(zhuǎn)變壓器以及霍爾元件等機(jī)械式的位置傳感器。光電編碼器和旋轉(zhuǎn)變壓器需要與轉(zhuǎn)子同軸連接,高速運(yùn)行時(shí)影響轉(zhuǎn)子的結(jié)構(gòu)強(qiáng)度和動(dòng)平衡。無(wú)位置傳感器算法避免了安裝位置傳感器所帶來(lái)的一系列問(wèn)題,在過(guò)去數(shù)十年間得到了廣泛探究[6-10],常用的無(wú)位置傳感器算法包括:直接計(jì)算法[6]、滑模觀測(cè)器[7]、高頻信號(hào)注入法[8]、模型參考自適應(yīng)法[9]。無(wú)位置傳感器算法復(fù)雜,導(dǎo)致系統(tǒng)的實(shí)時(shí)性不夠,且難以實(shí)現(xiàn)電機(jī)的全速域運(yùn)行。線性霍爾成本低,體積小,位置獲取簡(jiǎn)單,無(wú)需和轉(zhuǎn)子同軸安裝,高速下能夠兼顧成本和性能。
采用線性霍爾檢測(cè)轉(zhuǎn)子位置,容易受到諸多非理想因素的影響。文獻(xiàn)[11-16]為濾除線性霍爾信號(hào)中的諧波分量,設(shè)計(jì)了各種濾波器,包括低通濾波器(LPF)、自適應(yīng)陷波器(ANF)、擴(kuò)展卡爾曼濾波器(EKF)。但是濾波器的加入會(huì)導(dǎo)致位置信號(hào)的相移,造成一定的位置誤差,且隨著轉(zhuǎn)速的改變而改變,難以補(bǔ)償。文獻(xiàn)[17-18]為濾除線性霍爾信號(hào)中的直流分量,利用4個(gè)線性霍爾位置傳感器對(duì)稱(chēng)安裝,構(gòu)成兩對(duì)差分信號(hào),該方法對(duì)線性霍爾元件的安裝位置和靈敏度的一致性要求較高。文獻(xiàn)[19]采用有限元的方法對(duì)電機(jī)的氣隙磁場(chǎng)進(jìn)行了仿真分析,并通過(guò)實(shí)驗(yàn)驗(yàn)證了霍爾元件選擇合適的安裝位置可以提高其檢測(cè)精度。
本文首先分析采用線性霍爾檢測(cè)轉(zhuǎn)子位置時(shí),不同類(lèi)型的非理想因素的影響,包括兩路霍爾信號(hào)相位非正交、幅值不相等以及其中一個(gè)霍爾元件安裝位置與A相繞組軸線非重合,并將上述非理想因素所造成的位置誤差分為交流誤差和直流誤差兩種形式。在此基礎(chǔ)上,對(duì)于交流誤差,本文提出一種基于坐標(biāo)變換的位置誤差補(bǔ)償方法,通過(guò)坐標(biāo)變換提取出信號(hào)中正序分量,實(shí)現(xiàn)對(duì)交流誤差的補(bǔ)償;對(duì)于直流誤差,本文提出一種基于電流環(huán)特征量的位置誤差自適應(yīng)補(bǔ)償方法,根據(jù)電流環(huán)誤差特征量與轉(zhuǎn)子位置誤差之間的關(guān)系,自適應(yīng)調(diào)整位置補(bǔ)償角,實(shí)現(xiàn)對(duì)直流誤差的補(bǔ)償。最后,基于一臺(tái)隱極式高速永磁同步電機(jī)進(jìn)行仿真和試驗(yàn),驗(yàn)證所提出方法的有效性。
1 線性霍爾位置檢測(cè)誤差分析
線性霍爾通過(guò)檢測(cè)轉(zhuǎn)子磁場(chǎng)的磁感應(yīng)強(qiáng)度,輸出隨轉(zhuǎn)子位置變化的正弦電壓信號(hào)。如圖1(a)所示,在電機(jī)上相差90°電角度安裝兩個(gè)線性霍爾。永磁同步電機(jī)通常采用磁場(chǎng)定向控制(FOC),以A相繞組軸線作為轉(zhuǎn)子的起始位置,因此其中一個(gè)霍爾元件(霍爾α)安裝位置需要與A相軸線重合,輸出的兩路正交信號(hào)uα、uβ即為轉(zhuǎn)子位置的正弦和余弦函數(shù)值。通過(guò)反正切運(yùn)算可得到轉(zhuǎn)子的位置為

圖1 霍爾元件安裝位置和輸出信號(hào)Fig.1 Hall installing position and output signal
(1)
由上述分析可知,當(dāng)兩路霍爾信號(hào)uα和uβ幅值不相等、相位非正交以及霍爾元件α與電機(jī)A相繞組非重合時(shí),均會(huì)導(dǎo)致解算出的轉(zhuǎn)子位置存在一定的誤差,影響電機(jī)的運(yùn)行性能。
為提高位置估算精度,在仿真與實(shí)驗(yàn)中通常選用鎖相環(huán)代替反正切運(yùn)算獲取轉(zhuǎn)子位置,原理結(jié)構(gòu)如圖2所示,其位置解算原理可表示為

圖2 鎖相環(huán)原理框圖Fig.2 Principle block diagram of phase-locked loop
(2)

1.1 兩路霍爾信號(hào)幅值不相等
當(dāng)2個(gè)霍爾元件的靈敏度存在差異時(shí),同樣的磁感應(yīng)強(qiáng)度下輸出的電壓大小不相同,導(dǎo)致兩路霍爾信號(hào)幅值不相等。除此之外,由于安裝導(dǎo)致的2個(gè)霍爾元件與轉(zhuǎn)子的距離不相等,以及霍爾信號(hào)調(diào)理電路參數(shù)不同也會(huì)導(dǎo)致霍爾信號(hào)幅值不相等。此時(shí)兩路霍爾信號(hào)可表示為
(3)
其中λ為兩路霍爾信號(hào)幅值之差。將兩路霍爾輸入鎖相環(huán),可以得到
(4)

(5)
由上式可知,幅值不相等導(dǎo)致解算的位置信號(hào)中存在二倍基頻的誤差,具體波形如圖3所示。

圖3 兩路霍爾信號(hào)幅值不相等造成的位置誤差Fig.3 Position error caused by different amplitude of two hall signals
1.2 兩路霍爾信號(hào)相位非正交
由于安裝難以確保2個(gè)霍爾元件相差90°電角度,導(dǎo)致兩路霍爾信號(hào)相位非正交,同理可以推導(dǎo)出此時(shí)解算的轉(zhuǎn)子位置及其誤差,如式(6)所示,其中β為兩路信號(hào)的相位誤差。從圖4中可以看出,幅值不相等導(dǎo)致解算的位置信號(hào)存在一個(gè)直流和一個(gè)二倍基頻的誤差,即

圖4 兩路霍爾信號(hào)相位非正交造成的位置誤差Fig.4 Position error caused by the nonorthogonal phase of two hall signals
(6)
1.3 霍爾元件α與A相繞組軸線非重合
理想情況下,霍爾元件α與A相繞組重合,但是由于安裝的誤差,霍爾元件α與A相繞組存在一定的角度偏差,如圖5所示。假設(shè)霍爾元件α超前于A相繞組Δθr,F(xiàn)OC以A相繞組軸線作為實(shí)際轉(zhuǎn)子位置的初始位置,造成實(shí)際轉(zhuǎn)子位置滯后于解算出的轉(zhuǎn)子位置一個(gè)固定角度Δθr。

圖5 霍爾元件與A相繞組軸線非重合Fig.5 Hall installation error
1.4 低通濾波器的影響
為抑制諧波以及干擾信號(hào)的影響,霍爾信號(hào)采樣電路中加入低通濾波器(low-pass filter,LPF),造成的位置誤差為
(7)
其中:ωL為截止頻率;ωe為電角速度。LPF造成的位置誤差為直流形式,且隨著轉(zhuǎn)速的升高而增大。
2 位置檢測(cè)誤差補(bǔ)償
由前述分析可知,兩路霍爾信號(hào)幅值不相等以及相位非正交所造成的誤差為交流形式,誤差隨轉(zhuǎn)子的位置改變而改變。霍爾元件與A相繞組軸線非重合以及LPF造成的誤差為直流形式,誤差不隨轉(zhuǎn)子位置改變而改變。針對(duì)這兩種不同類(lèi)型的位置誤差,本文分別提出相應(yīng)的補(bǔ)償方法,下面對(duì)這兩種方法進(jìn)行分析。
2.1 交流誤差補(bǔ)償
兩路霍爾信號(hào)幅值不相等且相位非正交可表示為
(8)
us的軌跡為一個(gè)橢圓,將其分解成正、負(fù)序分量為
(9)

(10)
將us進(jìn)行反向Park變換可以得到
(11)
其中φ、φ可表示為:
(12)

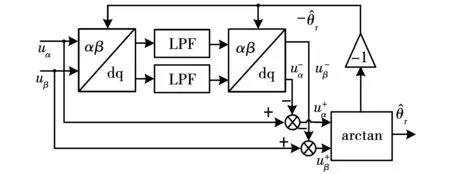
圖7 基于坐標(biāo)變換的誤差補(bǔ)償原理框圖Fig.7 Principle diagram of error compensation based on coordinate transformation
(13)
由上式可知,該方法雖然消除了轉(zhuǎn)子位置信號(hào)中的二倍頻誤差,但是會(huì)造成解算的轉(zhuǎn)子位置超前于實(shí)際轉(zhuǎn)子位置相位φ。
2.2 直流誤差補(bǔ)償
由前述分析可知,根據(jù)霍爾信號(hào)中的正序分量解算轉(zhuǎn)子位置、低通濾波器以及當(dāng)霍爾元件α位置與電機(jī)A相繞組軸線非重合,均會(huì)導(dǎo)致存解算出的轉(zhuǎn)子位置與實(shí)際的轉(zhuǎn)子位置存在一定誤差,且為直流形式,不隨轉(zhuǎn)子位置的改變而改變。針對(duì)于直流誤差,本文提出一種基于電流環(huán)特征量的位置誤差自適應(yīng)補(bǔ)償方法。

圖6 霍爾信號(hào)軌跡圖Fig.6 Trajectory chart of hall singal

圖8 考慮轉(zhuǎn)子位置誤差的矢量圖Fig.8 Vector diagram with the rotor position error
(14)
其中:rs為定子電阻;Ls為定子電感;E為反電勢(shì),可表示為
E=ωeψf。
(15)

(16)
由上式可知,在轉(zhuǎn)速一定的情況下,當(dāng)不存在轉(zhuǎn)子位置誤差時(shí),Δθr=0,特征量δ為最大值。因此,當(dāng)追蹤到最大的誤差特征分量時(shí),即實(shí)現(xiàn)了位置誤差的補(bǔ)償。
基于電流環(huán)誤差特征量的補(bǔ)償角自適應(yīng)調(diào)整流程圖如圖9所示,其中:dθc為算法的調(diào)節(jié)步長(zhǎng);Δθc為補(bǔ)償角;k為算法的執(zhí)行周期。首先施加一個(gè)任意極性的步長(zhǎng)dθc,比較前后周期δ的變化,若δ減小,說(shuō)明施加步長(zhǎng)的極性錯(cuò)誤,導(dǎo)致位置誤差增大,則下一周期改變步長(zhǎng)的極性;若δ增大,說(shuō)明施加步長(zhǎng)的極性正確,下一周期的步長(zhǎng)極性保持不變。如此根據(jù)前后周期δ的變化來(lái)調(diào)整下一周期調(diào)節(jié)步長(zhǎng)的極性,從而動(dòng)態(tài)調(diào)整補(bǔ)償角度,直至δ收斂至最大值,即實(shí)現(xiàn)了轉(zhuǎn)子位置誤差的補(bǔ)償,輸出補(bǔ)償角度可表示為

圖9 誤差補(bǔ)償角自適應(yīng)調(diào)整Fig.9 Error compensation angle adaptive adjustment
(17)
由上式可知,位置誤差補(bǔ)償?shù)乃俣热Q于該算法的執(zhí)行頻率fa和調(diào)節(jié)步長(zhǎng)dθc。
基于電流環(huán)誤差特征量的位置誤差補(bǔ)償示意圖如圖10所示,假設(shè)位置誤差Δθr為0.5 rad。從兩幅圖的對(duì)比中可以看出,dθc越大,Δθc接近最優(yōu)補(bǔ)償角Δθr越快,即補(bǔ)償速度越快。由算法的原理可知,當(dāng)Δθc在Δθr附近時(shí),Δθc將在Δθr上下抖動(dòng),dθc越大,抖振越大,dθc的越小,抖振越小,但是補(bǔ)償速度較慢。fad越大,Δθc接近Δθr越快,即補(bǔ)償速度越快,但是可能會(huì)造成算法執(zhí)行周期短于電流環(huán)響應(yīng)時(shí)間,則前后周期采樣的特征量不能夠反映dθc所造成電流的變化,會(huì)導(dǎo)致步長(zhǎng)極性的錯(cuò)誤判斷;fad過(guò)低,則會(huì)降低補(bǔ)償速度。fad和dθc具體數(shù)值通常可通過(guò)仿真和實(shí)驗(yàn)測(cè)試得到,本文通過(guò)仿真和實(shí)驗(yàn)測(cè)試,將fad設(shè)置為50 Hz,dθc設(shè)置為0.03。

圖10 位置誤差補(bǔ)償示意圖Fig.10 Position error compensation diagram
由上述分析可知,所提出的基于電流環(huán)特征量的位置誤差自適應(yīng)補(bǔ)償方法不僅適用于線性霍爾,當(dāng)采用其他種類(lèi)的位置傳感器或者無(wú)位置傳感器算法檢測(cè)轉(zhuǎn)子位置時(shí),存在直流形式的位置誤差,該方法依然適用。
3 仿真與實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證上述兩種轉(zhuǎn)子位置誤差補(bǔ)償方法的有效性,基于一臺(tái)高速隱極式永磁同步電機(jī)進(jìn)行仿真和實(shí)驗(yàn)驗(yàn)證,其樣機(jī)主要參數(shù)如表1所示。

表1 仿真模型的參數(shù)
3.1 仿真驗(yàn)證
在仿真模型中主動(dòng)設(shè)置兩路霍爾信號(hào)為
(18)


圖11 交流位置誤差補(bǔ)償仿真結(jié)果Fig.11 Simulated results of AC position error compensation
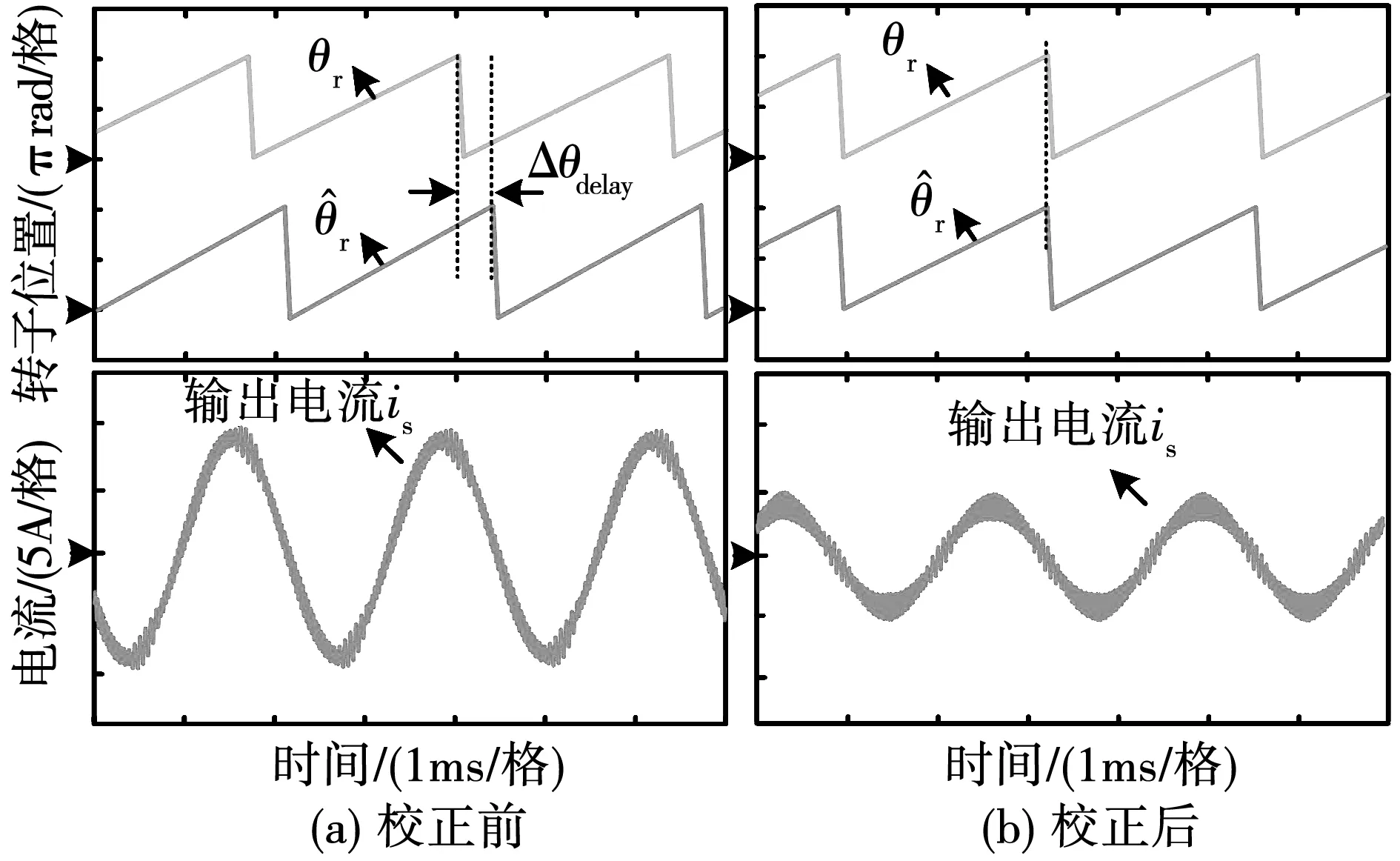
圖12 直流誤差補(bǔ)償仿真結(jié)果Fig.12 Simulated results of DC position error compensation

圖13 直流位置誤差補(bǔ)償方法的動(dòng)態(tài)響應(yīng)性能Fig.13 Dynamic response performance of DC position error compensation method

圖14 轉(zhuǎn)速突變時(shí)直流誤差補(bǔ)償仿真結(jié)果Fig.14 Simulation results of DC error compensation under speed variation

圖15 負(fù)載突變時(shí)直流誤差補(bǔ)償仿真結(jié)果Fig.15 Simulation results of DC error compensation under load variation
3.2 實(shí)驗(yàn)驗(yàn)證
本文搭建了基于TMS320F28377D和GaN FET功率器件的高速驅(qū)動(dòng)平臺(tái)進(jìn)行實(shí)驗(yàn),相應(yīng)電機(jī)與驅(qū)動(dòng)平臺(tái)如圖16所示,電機(jī)帶葉輪負(fù)載。

圖16 高速永磁同步電機(jī)與驅(qū)動(dòng)器平臺(tái)Fig.16 HSPMSM and high-speed drive platform

圖17 交流位置誤差補(bǔ)償實(shí)驗(yàn)結(jié)果Fig.17 Experimental results of AC position error compensation

圖18 直流誤差補(bǔ)償實(shí)驗(yàn)結(jié)果Fig.18 Experimental results of DC position error compensation
圖19為算法切入瞬間的動(dòng)態(tài)響應(yīng)實(shí)驗(yàn)結(jié)果,可以看出,在0.6 s時(shí)間內(nèi),隨著補(bǔ)償角度Δθc的增大,輸出電流逐漸減小,當(dāng)補(bǔ)償角度達(dá)到1.1 rad時(shí),會(huì)在1.1 rad上下抖動(dòng),由于調(diào)節(jié)步長(zhǎng)較小,抖動(dòng)較小,對(duì)系統(tǒng)的穩(wěn)定性的影響也較小。

圖19 直流位置誤差補(bǔ)償方法的動(dòng)態(tài)響應(yīng)性能Fig.19 Dynamic response performance of DC position error compensation method

圖20 變轉(zhuǎn)速時(shí)直流誤差補(bǔ)償實(shí)驗(yàn)結(jié)果Fig.20 Experimental results of DC error compensation under speed variation

圖21 變轉(zhuǎn)速時(shí)位置補(bǔ)償角的變化Fig.21 Variation of position compensation angle under speed variation
綜上所述,本文通過(guò)較為全面的仿真和實(shí)驗(yàn)結(jié)果對(duì)比分析,驗(yàn)證了所提出的轉(zhuǎn)子位置誤差補(bǔ)償方法的有效性。
4 結(jié) 論
本文分析了兩路霍爾信號(hào)幅值不相等、相位非正交、低通濾波器以及安裝位置偏差對(duì)轉(zhuǎn)子位置檢測(cè)的影響,將上述非理想因素造成的位置誤差分為交流誤差和直流誤差。針對(duì)于交流誤差,提出了一種基于坐標(biāo)變換的位置誤差補(bǔ)償方法;針對(duì)于直流誤差,提出了一種基于電流環(huán)特征量的位置誤差自適應(yīng)補(bǔ)償方法。方法的優(yōu)勢(shì)在于:1)兩種補(bǔ)償方法無(wú)需對(duì)轉(zhuǎn)子位置誤差準(zhǔn)確定量,即可實(shí)現(xiàn)誤差的補(bǔ)償;2)兩種方法實(shí)現(xiàn)簡(jiǎn)單,占用的控制芯片資源較少;3)基于電流環(huán)特征量的位置誤差自適應(yīng)補(bǔ)償方法對(duì)其他的位置傳感器或者無(wú)位置傳感器算法具有一定的適用性。本文未考慮霍爾信號(hào)中存在直流分量對(duì)轉(zhuǎn)子位置檢測(cè)的影響,需要進(jìn)一步探究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
