利用增廣雅克比矩陣的冗余機械臂逆運動學(xué)求解算法
2021-07-12 03:15:36張承瑞陳齊志薛祥儒
科學(xué)技術(shù)與工程 2021年16期
王 騰, 張承瑞*, 陳齊志, 薛祥儒
(1.山東大學(xué)機械工程學(xué)院, 濟南 250061; 2.山東大學(xué), 高效潔凈機械制造教育部重點實驗室, 濟南 250061)
當(dāng)機械臂自身所具有的自由度多于執(zhí)行給定任務(wù)所需的自由度時,機械臂存在運動學(xué)冗余。相比于非冗余機械臂,運動學(xué)冗余使得機械臂具備了更高的靈活性。
一般來說,運動學(xué)逆解分為封閉解[1-2]和數(shù)值解兩種形式。封閉解具有很高的計算效率,這使其在實時控制中受到青睞。文獻[3]在獲得的與臂型角相關(guān)的解析表達式的基礎(chǔ)上,通過優(yōu)化最小勢能指標(biāo)確定臂型角的大小,然后對各關(guān)節(jié)位置進行了求解。文獻[4]通過限制臂型角的范圍,使得逆解結(jié)果不會導(dǎo)致機械臂發(fā)生自身碰撞。文獻[5]對機械臂的構(gòu)型進行了分析,并根據(jù)幾何特性獲得了多關(guān)節(jié)偏置機械臂的封閉解。然而封閉形式的運動學(xué)逆解只適用于特定結(jié)構(gòu)的機械臂,通用性較差。數(shù)值計算方法不尋求一種解析關(guān)系[6-7],因此適用于大多數(shù)的機械臂。為了滿足實時控制需求,在實際應(yīng)用中需要考慮數(shù)值逆解算法的求解效率。
梯度投影法(gradient projection method,GPM)[8]利用機械臂在雅可比矩陣零空間的“自運動”解決冗余問題。文獻[9]在此基礎(chǔ)上選用阻尼最小二乘形式的偽逆,使機械臂具備了避開奇異位姿的能力。文獻[10]將阻尼最小二乘偽逆求解方法與牛頓-拉夫遜迭代方法相結(jié)合,提高了軌跡跟蹤精度。文獻[11]利用由碰撞檢測反饋的避障向量構(gòu)造目標(biāo)函數(shù),實現(xiàn)了機械臂在復(fù)雜場景下的避障。然而,工作空間中的封閉路徑通過偽逆方法映射到關(guān)節(jié)空間后卻不是封閉的,即執(zhí)行循環(huán)任務(wù)時,機械臂并不能回到初始位姿,這使得機械臂的運動不可預(yù)測[12]。運動的不可重復(fù)性限制了冗余機械臂的應(yīng)用范圍。文獻[13]將機械臂的子任務(wù)選擇為優(yōu)化保證可重復(fù)運動的目標(biāo)函數(shù),使機械臂的運動具備可重復(fù)性。但是將運動學(xué)冗余用于獲得非冗余機械臂的基本特性,并沒有發(fā)揮出冗余機械臂應(yīng)有的優(yōu)勢。雖然通過加權(quán)可以使目標(biāo)函數(shù)結(jié)合多種優(yōu)化準(zhǔn)則,但由于優(yōu)化能力有限,任務(wù)的執(zhí)行效果會受到影響。
增廣雅克比矩陣方法通過添加作為額外約束的優(yōu)化任務(wù),對原始任務(wù)進行增廣以解決冗余[14]。該方法能夠保證機械臂運動的可重復(fù)性,但隨著機械臂關(guān)節(jié)數(shù)目的增多,約束條件的計算難度增大。為解決增廣雅可比矩陣方法中約束計算復(fù)雜的問題,提出了一種冗余機械臂逆運動學(xué)求解算法。該算法采用分解求解策略,實現(xiàn)對復(fù)雜的約束條件的計算,求解效率高,可實際應(yīng)用于七自由度冗余機械臂的實時控制。現(xiàn)以避關(guān)節(jié)極限準(zhǔn)則作為約束條件增廣雅可比矩陣,采用提出的分解計算策略對約束條件進行分解,計算獲得增廣部分的數(shù)值結(jié)果,在笛卡爾空間進行軌跡規(guī)劃后,利用增廣雅可比矩陣計算出關(guān)節(jié)速度,對關(guān)節(jié)速度積分得到關(guān)節(jié)位置,完成逆運動學(xué)的求解。
1 運動學(xué)冗余求解方法
對于具有n個關(guān)節(jié)的機械臂,定義qi(i=1,2,…,n)表示第i個關(guān)節(jié)的位置,則機械臂的位姿可由向量q=[q1,q2,…,qn]T唯一確定。維度為m的向量x表示機械臂末端相對于基坐標(biāo)的位置與姿態(tài)。當(dāng)n>m時,對于給定的任務(wù)來說,機械臂是運動學(xué)冗余的,冗余自由度r=n-m。關(guān)節(jié)空間與笛卡爾空間之間的關(guān)系由正運動學(xué)公式表示為
x=f(q)
(1)
式(1)中:f為與關(guān)節(jié)位置和機械臂連桿參數(shù)有關(guān)的非線性向量函數(shù),f:Rn→Rm。
對時間求導(dǎo),得到速度層面的運動學(xué)關(guān)系為

(2)
1.1 梯度投影法
微分運動學(xué)的最小范數(shù)解為

(3)
式(3)中:J?=JT(JJT)-1為雅克比矩陣J的Moore-Penrose偽逆。在式(3)的基礎(chǔ)上增加一個齊次項,則微分運動學(xué)的通解可以表示為

(4)
式(4)中:In為n×n的單位陣;z為n維的任意向量;In-J?J為J的零空間的投影算子。式(4)使得冗余機械臂具備在跟蹤目標(biāo)軌跡的過程中,利用“自運動”執(zhí)行與優(yōu)化準(zhǔn)則相關(guān)的子任務(wù)的能力。
令H(q)為選定的目標(biāo)函數(shù),要最小化H(q),那么z可以表示為
(5)
式(5)中:α為標(biāo)量正實數(shù),其數(shù)值的大小影響優(yōu)化的收斂速率。
1.2 增廣雅可比矩陣方法
引入跟蹤軌跡之外的任務(wù)擴展任務(wù)空間,則機械臂在運動過程中會受到額外任務(wù)的約束。將機械臂的額外任務(wù)選擇為在運動中滿足給定的準(zhǔn)則,那么機械臂的運動也可以看作是在運動學(xué)公式的約束下優(yōu)化相關(guān)的目標(biāo)函數(shù)H(q)。優(yōu)化問題可以表示為
(6)
式(6)中:F(q)=f(q)-x由運動學(xué)公式獲得,表示運動學(xué)約束函數(shù)。
當(dāng)目標(biāo)函數(shù)H(q)取極值時,H(q)的梯度在雅克比矩陣零空間上的投影為零[14]。假定q0為使目標(biāo)函數(shù)局部最優(yōu)的非奇異位姿,那么存在的關(guān)系為
(7)
(8)
式(8)中:Nr為由In-J?J中線性獨立的行所組成的r×n的矩陣。
將式(8)作為運動學(xué)公式的額外約束,那么機械臂運動過程中所要遵循的條件可表示為
(9)
對式(9)兩側(cè)求導(dǎo),能夠獲得增廣后的微分運動學(xué)公式為
(10)
(11)
對于工作空間中任意給定的點,求解式(11)能獲得唯一相對應(yīng)的位姿,這是機械臂運動具備可重復(fù)性的表現(xiàn)。
2 冗余機械臂逆運動學(xué)求解算法
利用增廣雅可比矩陣方法求解逆運動學(xué)問題,關(guān)鍵是雅可比矩陣增廣部分的計算。本文算法從增廣部分的形式和計算方法兩方面入手,解決機械臂關(guān)節(jié)數(shù)目較多時,增廣部分計算復(fù)雜的問題。
2.1 增廣部分推導(dǎo)
式(6)所表示的優(yōu)化問題可使用拉格朗日乘子法求解[15]。通過構(gòu)建拉格朗日函數(shù),可以將帶約束的優(yōu)化問題轉(zhuǎn)換為無約束的形式。定義拉格朗日函數(shù)為
L(q,λ)=H(q)+λTF(q)
(12)
式(12)中:λ為m維的拉格朗日乘子向量。
拉格朗日函數(shù)取極值時滿足:

(13)

(14)
根據(jù)式(14),文獻[15]推導(dǎo)出額外約束公式,可表示為
(15)
定義Ji(i=1,2,…,n)為J的第i列。式(15)中,投影算子Z為(n-m)×n的矩陣,它由J的零空間的n-m個線性獨立的行向量組成,其表達式為

(16)
式(15)形式下的額外約束的導(dǎo)數(shù)矩陣Ca為
(17)
對比式(15)與式(16)中投影算子的形式可以看出,由于涉及雅可比矩陣的偽逆J?,使得Nr計算復(fù)雜。由式(16)可以看出,Z的計算主要與雅可比矩陣的列有關(guān),利用矢量積方法[16]得出雅可比矩陣后,很容易便能確定所需的列向量。更重要的是,矩陣的逆運算僅涉及形式簡單的單個矩陣,與J?相比,計算量大幅減小。為構(gòu)造增廣雅可比矩陣,需要將額外約束相對于關(guān)節(jié)位置向量的偏導(dǎo)數(shù)作為矩陣的增廣部分。然而,對于實際使用的七自由度冗余機械臂來說,計算Z已經(jīng)足夠復(fù)雜,對矩陣的增廣部分的計算就變得更加困難。
2.2 增廣部分分解計算
為計算Ca的數(shù)值結(jié)果,對式(17)做進一步分解。當(dāng)n-m=1時,Ca可以表示為

(18)
為了進一步減少計算量,應(yīng)盡可能地避免對目標(biāo)函數(shù)進行兩次求導(dǎo)運算。實際上,一個簡單且有效的目標(biāo)函數(shù)能夠提供顯式的導(dǎo)數(shù)表達式,這樣二階導(dǎo)數(shù)值可以僅通過對顯式的導(dǎo)數(shù)表達式進行一次求導(dǎo)而獲得。避關(guān)節(jié)極限準(zhǔn)則[17]可以選作目標(biāo)函數(shù),其定義為

(19)
式(19)中:qi,min和qi,max分別為第i個關(guān)節(jié)的位置qi的上限和下限。
2.3 算法流程
求解冗余逆運動學(xué)問題的算法流程如下。
Step 1利用矢量積方法計算雅可比矩陣J。

Step 4利用Ca對J增廣,構(gòu)造增廣雅可比矩陣Je。
Step 5計算Je的逆矩陣。



3 仿真及實驗驗證
為驗證本文方法的有效性,首先通過仿真與梯度投影法進行對比,然后將其應(yīng)用于如圖1所示的7自由度(degree of freedom, DOF)冗余機械臂的實時控制。機械臂的MDH(modified Denavit-Hartenberg)參數(shù)如表1所示。選用式(19)作為兩種方法中被優(yōu)化的目標(biāo)函數(shù),以避免運動過程中機械臂關(guān)節(jié)位置超出限位。機械臂各關(guān)節(jié)的運動范圍如表2所示。
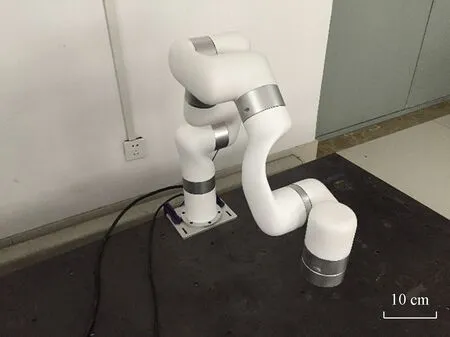
圖1 7自由度冗余機械臂Fig.1 7-DOF redundant manipulator
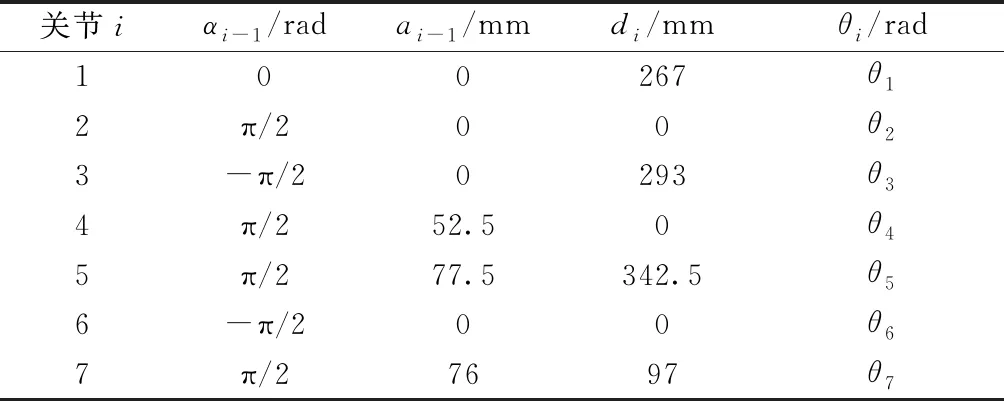
表1 機械臂MDH參數(shù)

表2 機械臂關(guān)節(jié)運動范圍
3.1 仿真對比
為評估本文算法的性能表現(xiàn),使機械臂末端姿態(tài)保持不變,從A點開始,按逆時針方向,沿如圖2所示的空間四邊形封閉路徑運動。機械臂的初始位姿q=[-10°,-20°,0°,65°,10°,-50°,35°]T。四邊形路徑的頂點分別為A(507.02,-84.91,234.01)、B(507.02,75.09,234.01)、C(487.02,75.09,394.01)、D(487.02,-84.91,394.01)。該路徑分為AB、BC、CD、DA四段,每段分別使用S曲線[18]進行加減速規(guī)劃,規(guī)劃后機械臂末端的位置、速度變化曲線分別如圖3、圖4所示。
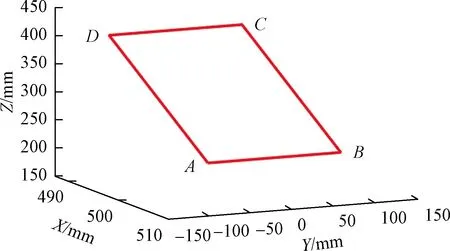
圖2 笛卡爾空間封閉路徑Fig.2 Closed path in Cartesian space
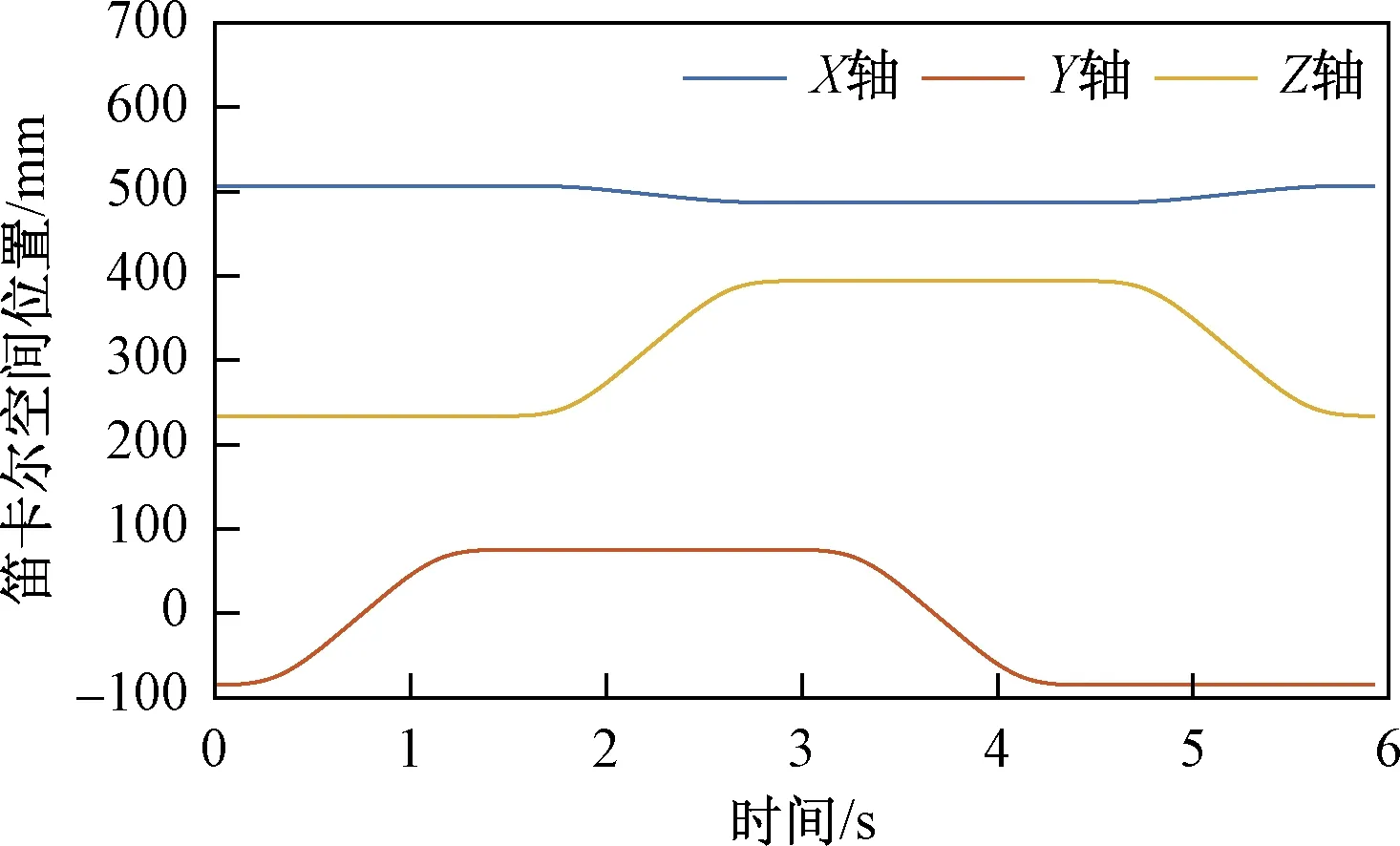
圖3 機械臂末端規(guī)劃位置Fig.3 Planned position of the end-effector of the manipulator
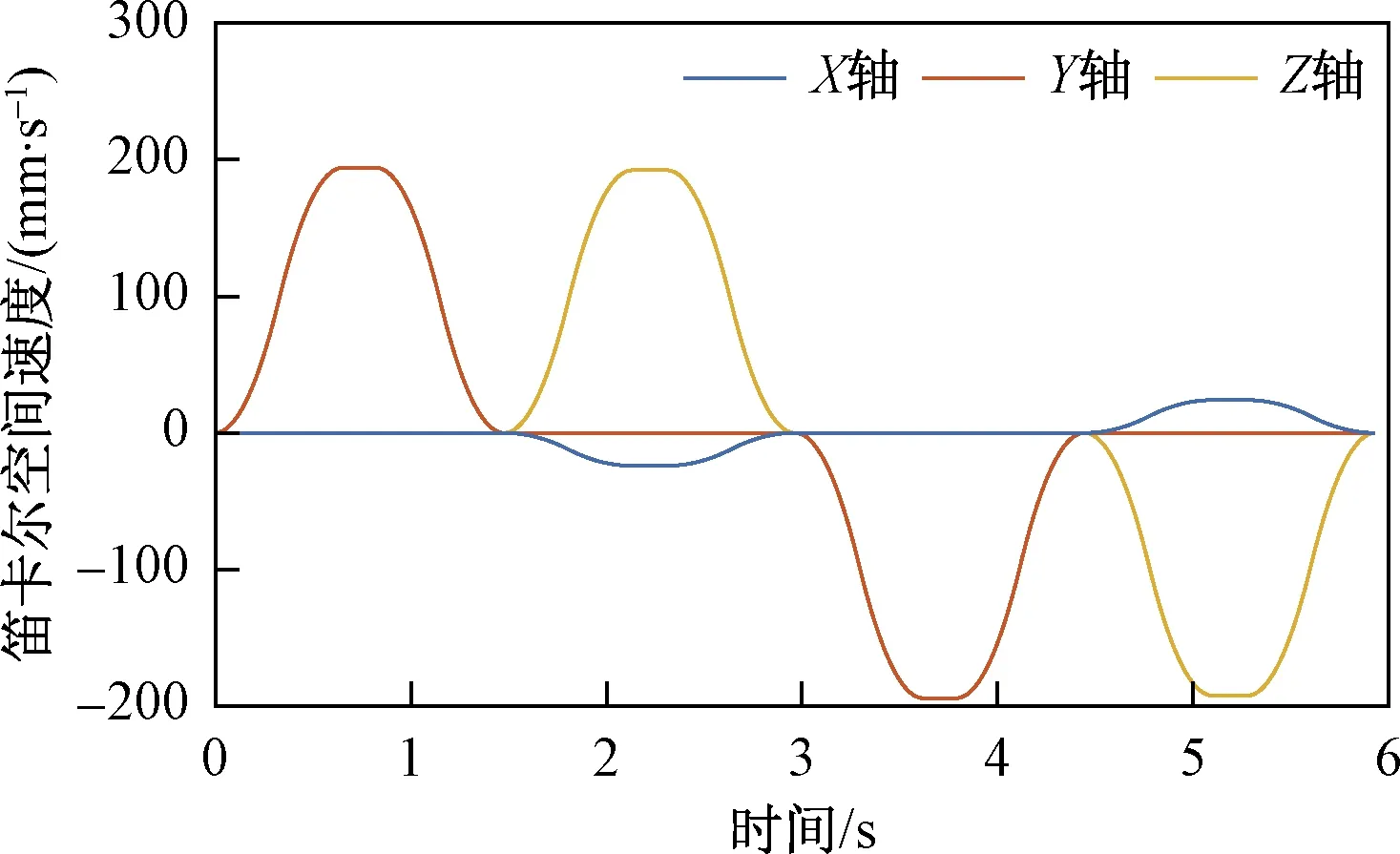
圖4 機械臂末端規(guī)劃速度Fig.4 Planned velocity of the end-effector of the manipulator
整個運動過程中,機械臂各關(guān)節(jié)的位置變化曲線如圖5所示。可以看出,曲線光滑連續(xù),關(guān)節(jié)位置都在允許的范圍內(nèi)。在相同的起始位姿下,利用梯度投影法跟蹤同樣的空間封閉四邊形軌跡。如圖6所示,關(guān)節(jié)位置同樣沒有超出限位。兩種方法都利用運動學(xué)冗余對目標(biāo)函數(shù)實現(xiàn)了很好的優(yōu)化。
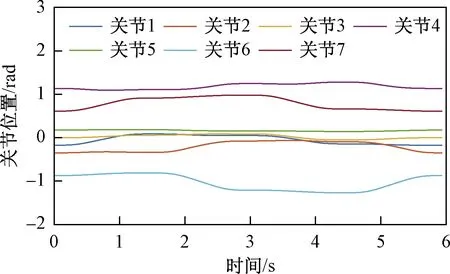
圖5 本文方法獲得的關(guān)節(jié)位置Fig.5 Joint position obtained by the proposed method
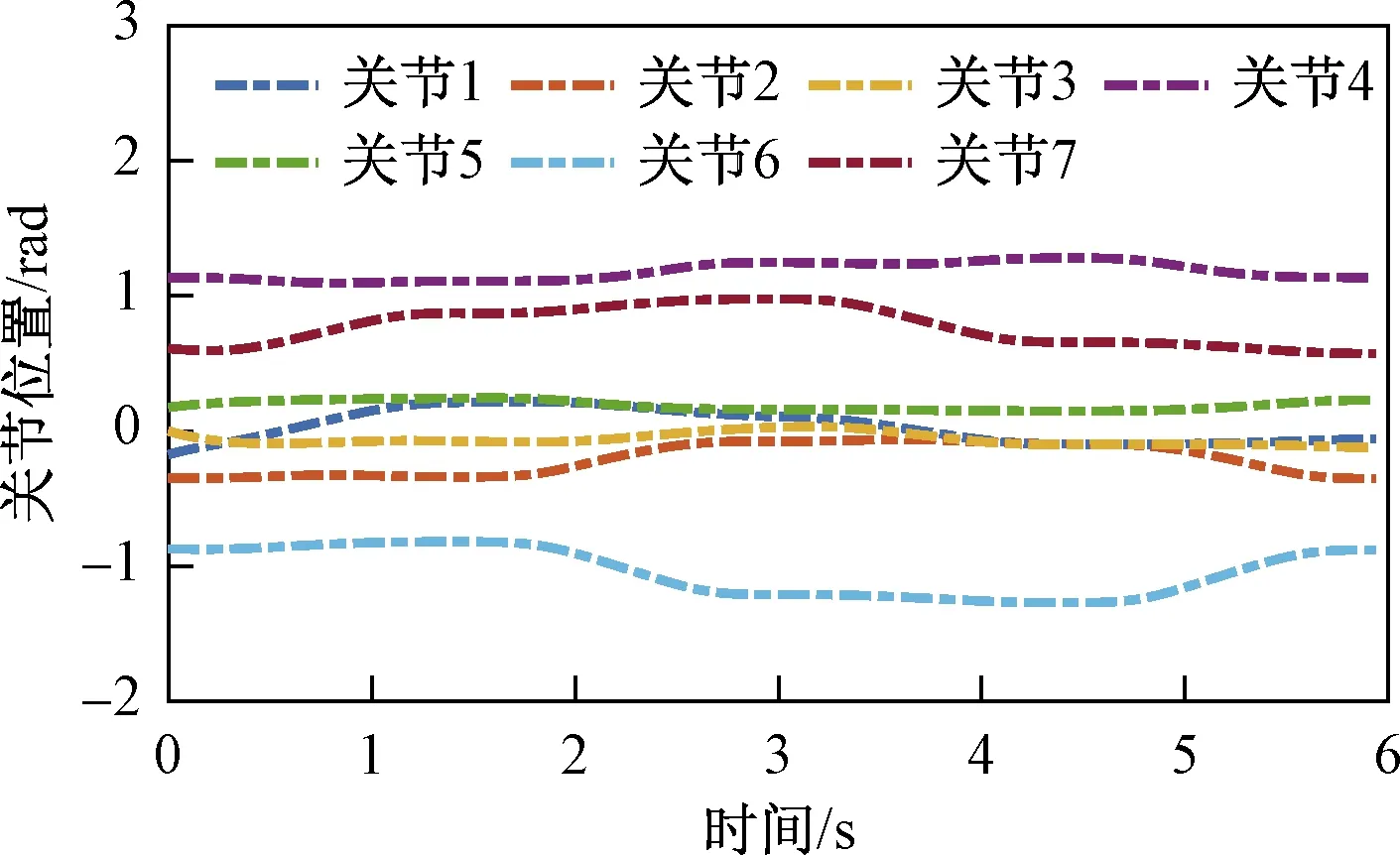
圖6 梯度投影法獲得的關(guān)節(jié)位置Fig.6 Joint position obtained by the gradient projection method
利用兩種方法跟蹤封閉軌跡后,各個關(guān)節(jié)始末位置的對比如表3所示。在機械臂末端回到起始位置時,本文方法使機械臂的位姿與初始位姿相同,這使得運動具有可重復(fù)性,而使用梯度投影法(gradient projection method,GPM)時,關(guān)節(jié)的最終位置相對于初始位置發(fā)生了偏移。
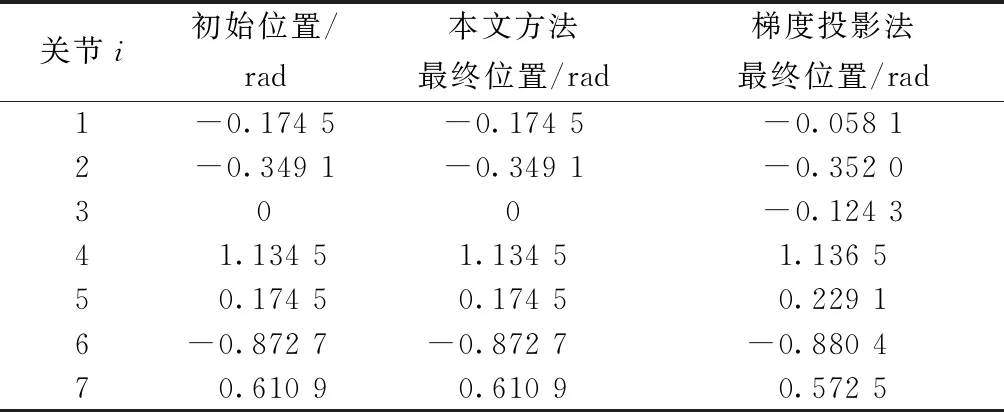
表3 機械臂關(guān)節(jié)始末位置對比
逆運動學(xué)問題求解的準(zhǔn)確性影響到機械臂跟蹤目標(biāo)軌跡時的精度,將兩種方法下的機械臂末端軌跡與期望軌跡進行對比,得到如圖7所示的位置誤差。本文方法對軌跡實現(xiàn)了準(zhǔn)確的跟蹤,梯度投影法Z軸方向的誤差相對較大,X軸和Y軸方向的精度較高,但誤差仍略大于本文方法。本文方法相對于梯度投影法,在軌跡跟蹤過程逆運動學(xué)的精確求解上具有很好的表現(xiàn)。
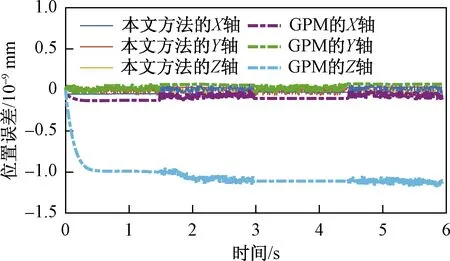
圖7 機械臂末端軌跡誤差Fig.7 Trajectory error of the end-effector of the manipulator
3.2 軌跡跟蹤實驗
本文算法由C++實現(xiàn),控制程序運行在配置為Intel(R) Core(TM) i5-3437U 1.90 GHz CPU、4 GB內(nèi)存的PC上,由實時拓展套件KRTS(kithara realtime suite)提供PC的實時操作系統(tǒng)。實驗系統(tǒng)的通信采用自主研發(fā)的EtherMAC(ethernet for manufacture automation control)[19]總線,通過網(wǎng)關(guān)與支持RS-485通信的機械臂連接,通信周期為8 ms。利用本文算法進行10 000次逆解運算,平均計算時間為176 μs,求解速度能夠滿足實時控制的要求。
如圖8所示,使機械臂執(zhí)行仿真時所采用的末端軌跡。循環(huán)運動3次,機械臂的關(guān)節(jié)位置、速度分別如圖9、圖10所示。可以看出,針對七自由度冗余機械臂,本文方法可保證逆運動學(xué)求解的準(zhǔn)確性,且關(guān)節(jié)位置、速度曲線平滑。同時,關(guān)節(jié)位置變化具有周期性,表明本文方法可保證機械臂運動的可重復(fù)性。
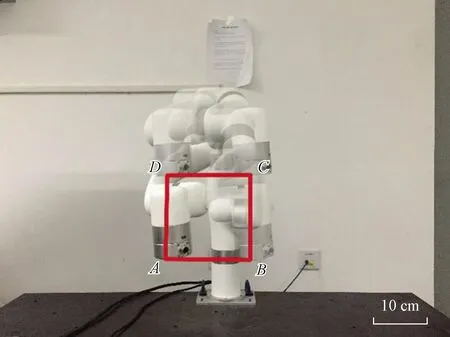
圖8 機械臂跟蹤規(guī)劃軌跡Fig.8 Manipulator tracking the planned trajectory
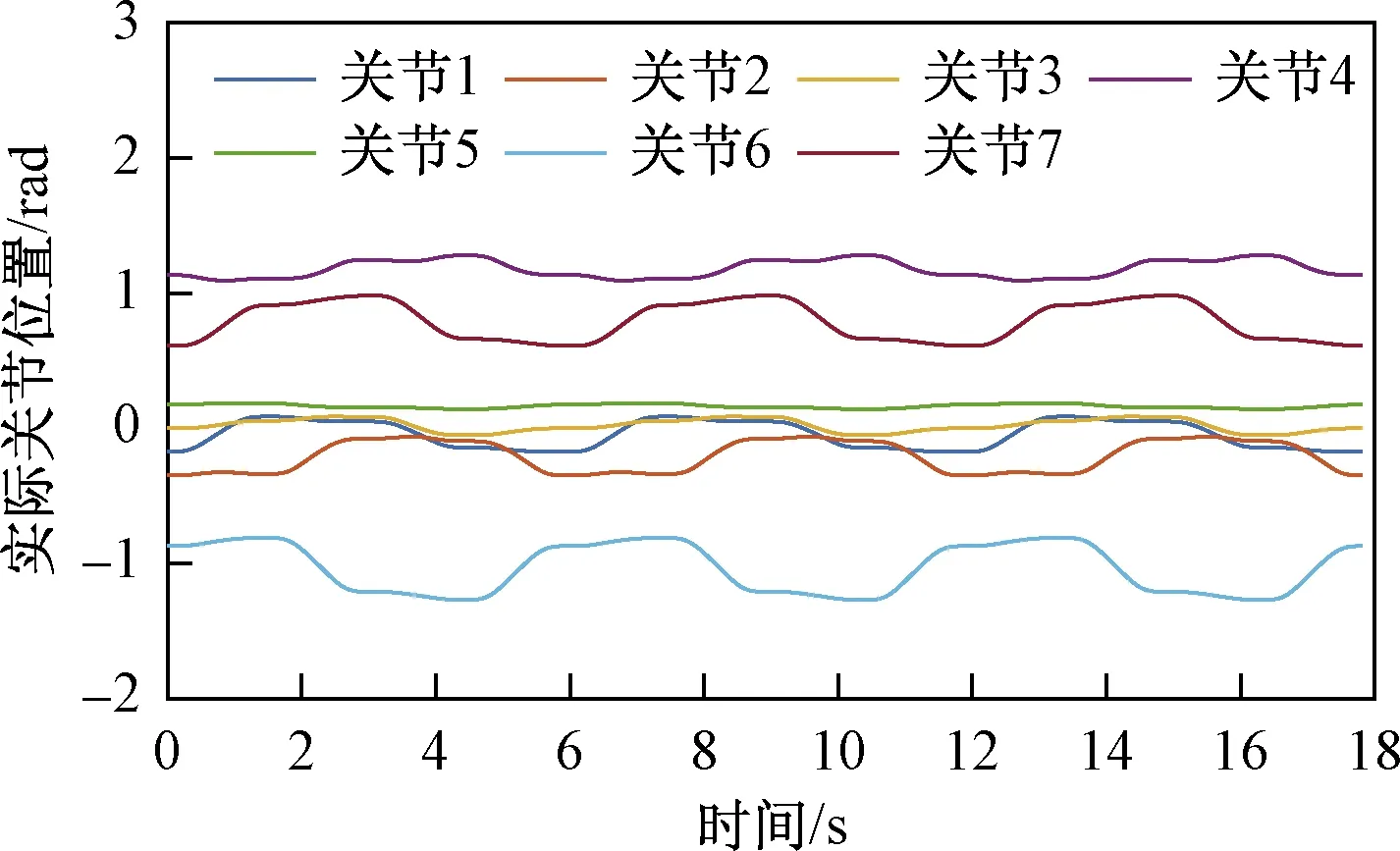
圖9 機械臂實際關(guān)節(jié)位置Fig.9 Actual joint position of the manipulator
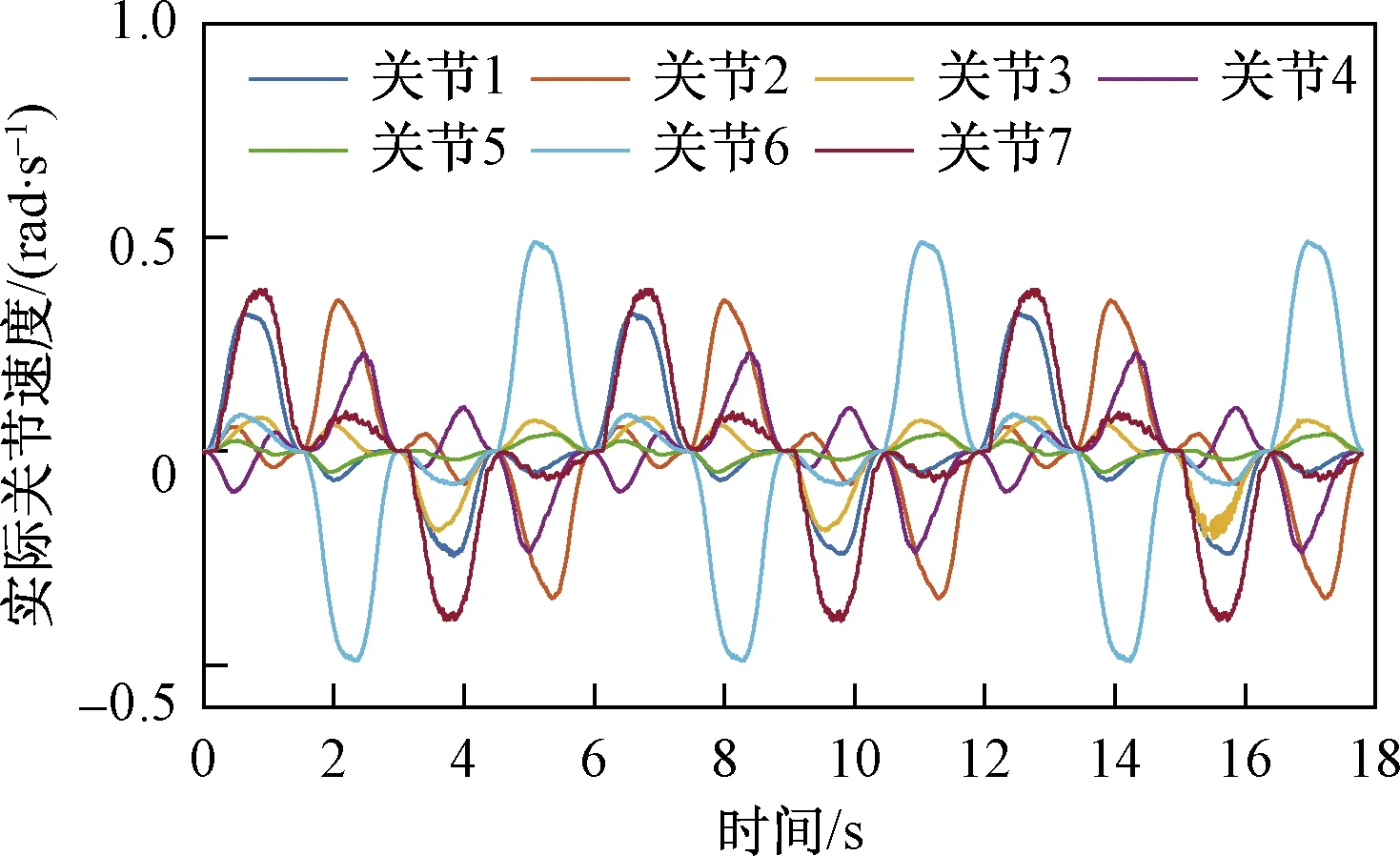
圖10 機械臂實際關(guān)節(jié)速度Fig.10 Actual joint velocity of the manipulator
4 結(jié)論
提出了一種利用增廣雅可比矩陣的冗余機械臂逆運動學(xué)求解算法。將優(yōu)化給定的目標(biāo)函數(shù)作為約束任務(wù)對機械臂的任務(wù)空間進行增廣,在此基礎(chǔ)上構(gòu)造了增廣雅克比矩陣。針對機械臂關(guān)節(jié)數(shù)目較多時,增廣雅可比矩陣難以計算的問題,通過對其中的增廣部分采用分解后計算的方式實現(xiàn)了增廣雅可比矩陣的有效求解。仿真結(jié)果表明,相比于梯度投影法,本文方法具更高的求解精度,且能夠保證機械臂追蹤封閉軌跡時運動的可重復(fù)性。算法平均求解時間為176 μs,計算效率滿足實時控制的要求。通過七自由度冗余機械臂軌跡跟蹤實驗,驗證了本文方法的可行性和穩(wěn)定性。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
兒童故事畫報(2019年5期)2019-05-26 14:26:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
