機器人與腹腔鏡根治術治療SiewertⅡ/Ⅲ型食管胃結合部腺癌的療效比較及預后影響因素分析
2021-07-09 03:17:16徐茂林滕志鵬鄺衍紳劉洪一賈寶慶
解放軍醫學院學報 2021年4期
柯 沐,徐茂林,劉 新,黃 埔,滕志鵬,鄺衍紳,李 森,李 鵬,劉洪一,賈寶慶,
1 解放軍醫學院研究生院,北京 100853;2 解放軍總醫院第一醫學中心 普通外科醫學部,北京 100853
食管胃結合部腺癌(adenocarcinoma of esophagogastric junction,AEG)是一種位于特殊解剖部位的惡性腫瘤,具有與胃癌和食管癌不同的生物學行為,更容易發生血液和淋巴轉移,多數患者確診時已是進展期,預后較差。Kofoed等[1]的研究顯示,食管胃結合部腺癌患者術后5年生存率為18%~50%。多項研究顯示食管胃結合部腺癌發病率在全球范圍內逐年上升,尤其是SiewertⅡ/Ⅲ型AEG[2–4]。目前關于SiewertⅠ型AEG的外科治療方式已基本達成共識,其手術方式主要參考食管下端癌。而對于SiewertⅡ/Ⅲ型AEG的外科治療仍存在爭議,其中腹腔鏡手術對SiewertⅡ/Ⅲ型AEG的治療已被證明是安全有效的[5–8]。但有關機器人輔助治療SiewertⅡ/Ⅲ型AEG的相關報道較少。本研究回顧性分析了解放軍總醫院第一醫學中心普通外二科收治的111例SiewertⅡ/Ⅲ型AEG患者的臨床病理資料,比較機器人與腹腔鏡手術的近期和遠期臨床療效,并分析與預后相關的臨床因素。
資料和方法
1 臨床資料 收集解放軍總醫院第一醫學中心普通外二科2014年1月- 2019年8月收治的111例SiewertⅡ/Ⅲ型AEG患者的臨床資料。納入標準:1)術前或術后經病理證實為SiewertⅡ/Ⅲ型AEG;2)術前影像學檢查未發現遠處轉移;3)行腹腔鏡或機器人輔助下根治手術。排除標準:1)術前經過新輔助治療;2)合并其他惡性腫瘤;3)術前存在心肺腦等部位嚴重疾病;4)術后復發行二次切除;5)急診手術;6)資料不完整。本研究通過解放軍總醫院醫學倫理委員會審批(S2020-326-01),患者及家屬術前均簽署知情同意書。
2 手術方法 兩組分別采用達芬奇機器人手術系統和STORZ腹腔鏡系統。兩組均采用氣管插管,全身麻醉,取仰臥體位。根據術中探查的具體情況分別行近端胃或全胃切除。機器人組Troca采用“W型”5孔法布局,安裝好鏡頭、各機械臂、超聲刀和無創抓鉗。腹腔鏡組則采用通用的5孔法布局。兩組患者均按《日本胃癌處理規約》第13版行標準的胃癌根治術并清掃D2淋巴結。采用上腹部正中小切口手輔助重建消化道,近端胃大部切除采用食管殘胃吻合,全胃切除采用Roux-en-Y吻合方式。
3 觀察指標 1)臨床資料:性別、年齡、體質量指數(body mass index,BMI)、美國麻醉師協會(American Society of Anesthesiologists,ASA)評分、既往史、個人史、腫瘤直徑、腫瘤病理學TNM分期(參考第8版美國癌癥聯合委員會胃癌TNM分期法)和分化程度(G1 ~ G2,G3 ~ G4)等。2)圍術期指標:手術時間、術中失血量、術中輸血率、中轉開腹率、腫瘤遠端距切緣距離、切緣陽性率、清掃淋巴結數目、術后住院時間、術后胃腸功能恢復時間和胃管拔除時間等。3)術后并發癥:肺部感染、胸腔積液、胰瘺、腸梗阻、吻合口瘺及切口感染等。4)術后隨訪:死亡時間、復發或轉移時間及1年、2年、3年總生存率。Siewert Ⅱ/Ⅲ型AEG患者行根治術后預后影響因素分析。
4 隨訪 主要通過電話、短信及門診復查進行隨訪。隨訪內容包括患者存活情況、腫瘤復發或轉移情況。總生存時間為手術當天至隨訪截止日或患者死亡時間,隨訪截止日為2020年12月25日。
5 統計學分析 使用SPSS26.0統計軟件進行分析。符合正態分布的計量資料以表示,兩組間比較采用兩獨立樣本t檢驗。非正態分布的計量資料用中位數(四分位間距)表示,兩組間比較用秩和檢驗。計數資料用例數(%)表示,兩組間比較用χ2檢驗或Fisher’s精確概率檢驗。生存分析采用Kaplan-Meier法和log-rank檢驗,Cox回歸模型分析與生存獨立關聯的因素。P<0.05為差異有統計學意義。
結 果
1 兩組患者臨床資料比較 經過篩選,共納入111例患者,其中男性94例,女性17例;中位年齡63(41 ~ 82)歲;機器人組50例,腹腔鏡組61例。兩組患者Siewert分型、年齡、性別、手術切除范圍、BMI、ASA評分和既往史等一般資料差異無統計學意義(P>0.05),腫瘤臨床分期、腫瘤直徑大小和腫瘤病理分級差異亦無統計學意義(P>0.05)。見表1。
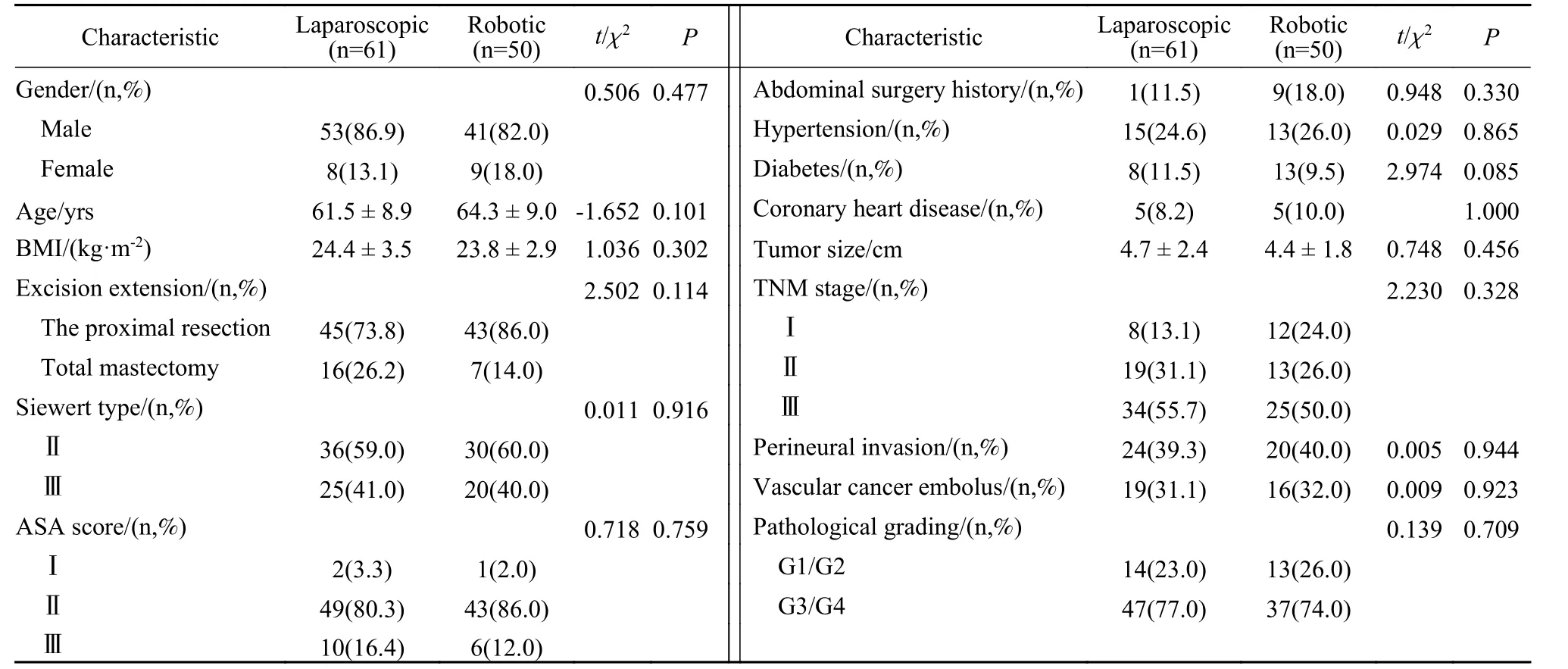
表1 兩組食管胃結合部腫瘤患者的臨床資料比較Tab. 1 Comparison of clinical data about patients with AEG between the two groups
2 兩組圍術期指標比較 兩組患者均未出現圍術期死亡,其中有1例腹腔鏡患者手術中轉開腹。兩組術中失血量、術中輸血率、切緣陽性率差異無統計學意義(P>0.05),但機器人組手術時間更長[(231.7 ± 43.2) min vs (192.1 ± 44.0) min,P<0.001]。兩組清掃淋巴結數目、腫瘤離上切緣距離差異無統計學意義(P>0.05)。兩組的術后消化道功能恢復時間和術后住院時間差異亦無統計學意義(P>0.05),但機器人組術后拔除胃管時間更短[(7.1 ± 1.4) d vs (8.5 ± 2.9) d,P=0.001]。機器人組術后出現吻合口瘺1例,多器官功能障礙綜合征1例,肺部感染1例;腹腔鏡組術后出現胰瘺1例,腸梗阻1例,吻合口瘺1例,胸腔積液2例,切口感染1例。出現以上并發癥的患者均積極治療后好轉出院。兩組術后并發癥發生率差異無統計學意義(9.8% vs 6.0%,P>0.05)。見表2。

表2 兩組圍術期指標比較Tab. 2 Comparison of perioperative variables between the two groups
3 兩組術后復發及生存情況比較 111例患者中有5例患者失訪(機器人組4例,腹腔鏡組1例),106例患者獲得術后隨訪,隨訪時間2~83個月,中位隨訪時間29個月。機器人組和腹腔鏡組的術后復發轉移比例(21.7% vs 36.7%)和腫瘤相關死亡率(21.7% vs 33.3%)差異無統計學意義(P>0.05)。Kaplan-Meier曲線顯示機器人組和腹腔鏡組的1年、2年、3年無瘤生存率分別為87.0%、82.1%、74.1%和81.6%、72.1%、65.4%,1年、2年、3年總生存率分別為93.5%、82.2%、79.5%和85.0%、78.1%、73.0%。兩組的無病生存曲線(P=0.117)和總生存曲線(P=0.216)差異無統計學意義。見表3、圖1、圖2。

圖1 兩組患者的無病生存曲線Fig.1 Disease-free survival curve of patients in the two groups

圖2 兩組患者的總生存曲線Fig.2 Overall survival curves of patients in the two groups
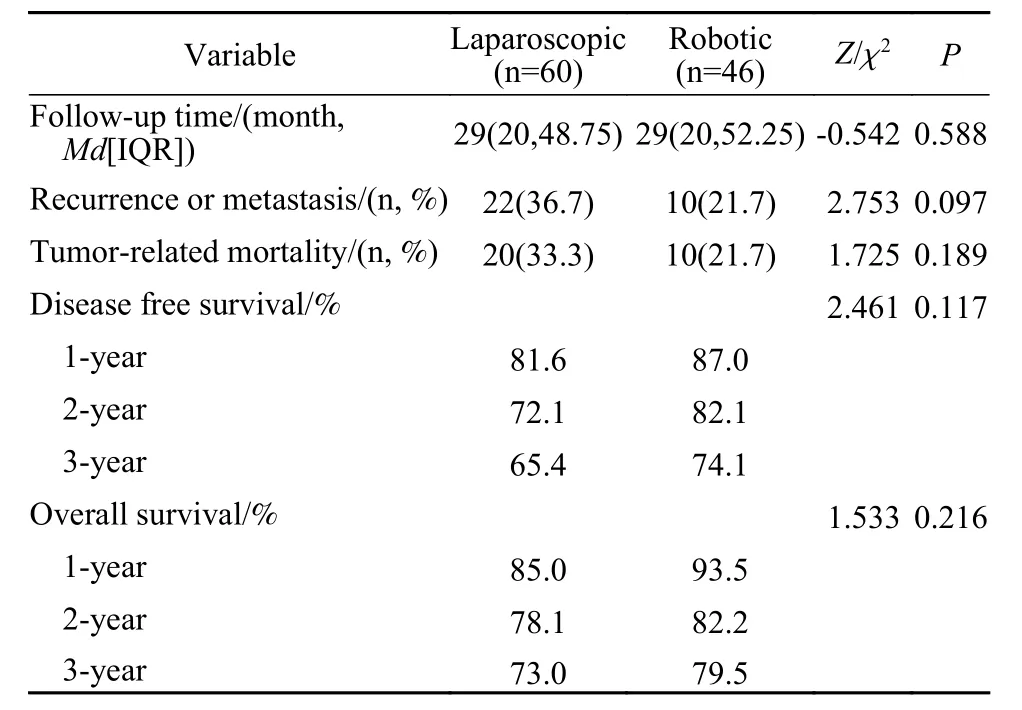
表3 兩組術后復發及生存情況比較Tab. 3 Comparison of postoperative recurrence and survival between the two groups
4 預后關聯因素分析 106例患者單因素分析結果顯示,腫瘤的Siewert分型、手術切除范圍、TNM分期、T分期、N分期、手術切緣、脈管癌栓和腫瘤大小與患者術后無病生存相關(P<0.05);年齡、腫瘤的Siewert分型、手術切除范圍、TNM分期、T分期、N分期、手術切緣、脈管癌栓和腫瘤大小與術后總生存相關(P<0.05)。多因素分析結果顯示:腫瘤的Siewert分型、T分期、N分期和手術切緣與術后無病生存率相關(P<0.05)。年齡、TNM分期和腫瘤大小與患者術后總生存率相關(P<0.05)。見表4、表5。
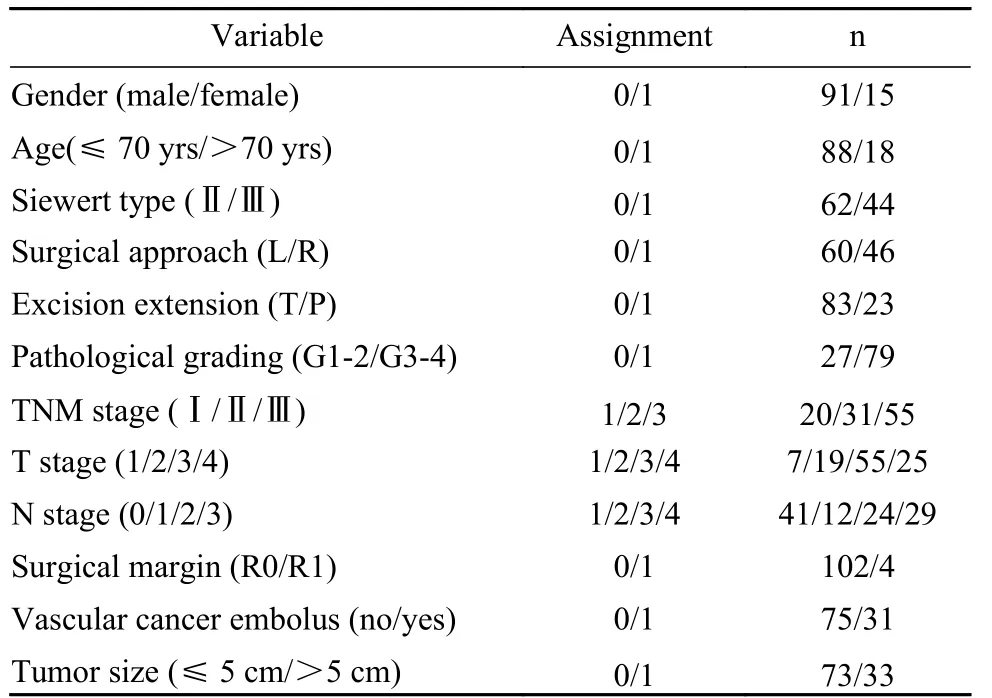
表4 OS和DFS回歸分析的自變量賦值Tab. 4 Variable assignment for univariale and multivariale Cox analysis of OS and DFS
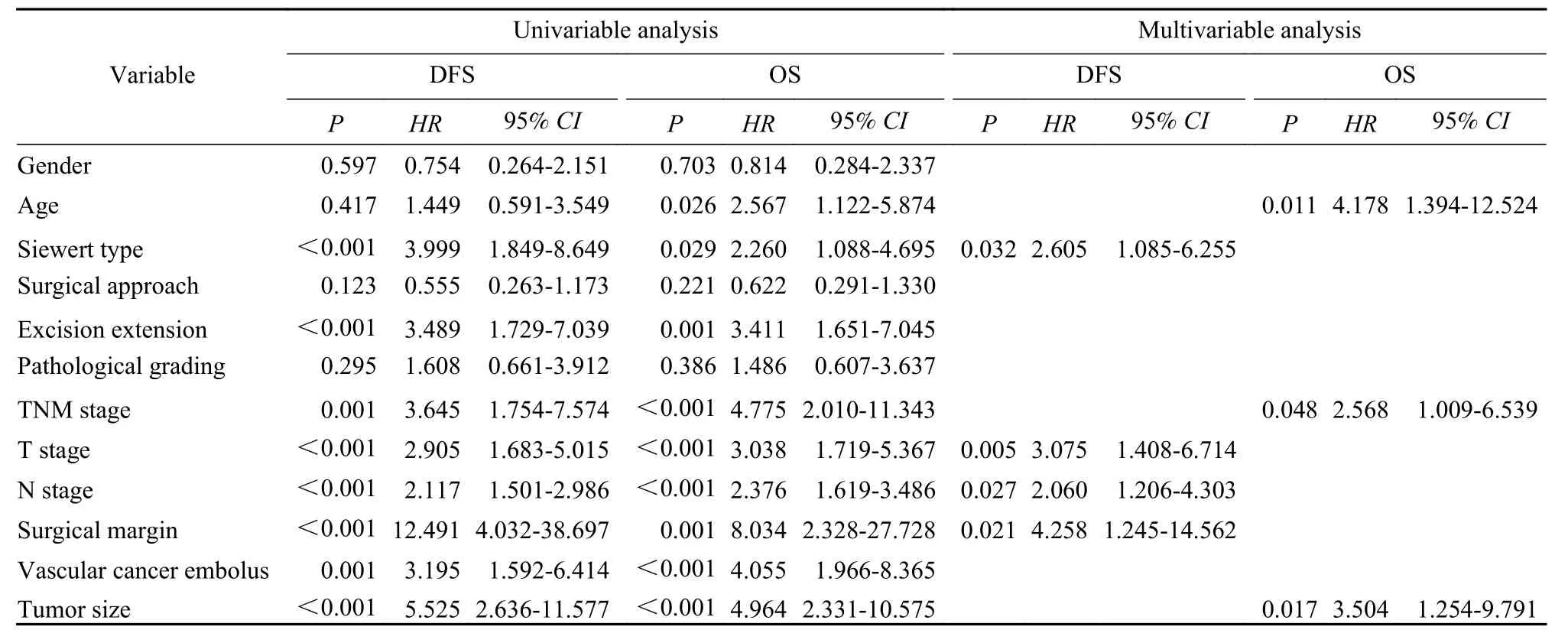
表5 總生存期和無病生存期的單因素和多因素分析(n=106)Tab. 5 Univariable and multivariable Cox analysis of OS and DFS (n=106)
討 論
目前,多項研究顯示AEG每年的發病人數不斷上升[2–4]。外科根治性切除術在AEG的治療中扮演著重要角色。腹腔鏡手術已被證明擁有較開放手術更好的近期療效,和相似的遠期療效[5–8]。雖然3D腹腔鏡具有較傳統腹腔鏡更好的立體視野和縱深感,但仍存在一些不足,如操作器械活動自由度相對較低,杠桿效應容易放大手部震顫,術者長時間的操作導致體位不適(特別在進行復雜手術時)等。機器人手術系統的出現改善了這些不足。目前機器人手術系統已廣泛應用于普通外科、泌尿外科、婦科及心血管外科等領域,取得了令人滿意的臨床效果[9–13]。機器人與腹腔鏡在臨床近期和遠期療效的差異,也是外科醫生關注的重點。
術中失血量和手術時間反映了手術方式的安全性。一項Meta分析納入5 953例胃癌患者,比較機器人與腹腔鏡的療效差異,研究結果顯示機器人組手術時間更長,術中失血量更少,術后進食時間更早[14]。本研究顯示,兩組術中失血量無統計學差異,機器人組手術時間更長。在術中失血量方面,可能因為兩組術中均未對血管造成大的損傷,所以未見明顯差異。機器人組手術耗時更長的主要原因是機器人相比腹腔鏡多出了機械臂的安裝和調試過程。有研究表明,機器人與腹腔鏡胃腫瘤切除實際操作時間差異無統計學意義(P>0.05)[15]。隨著手術團隊配合得越來越默契,機械臂的安裝時間通常會縮短為15~20 min。達芬奇機器人手術系統還能通過降低復雜解剖部位的操作難度,以及減少對血管的損傷而縮短手術時間。術后恢復指標同樣是評估手術安全性的重要依據。本研究結果顯示,與腹腔鏡組相比,機器人組拔除胃管時間更短(P<0.05),而在術后胃腸功能恢復時間、術后住院時間和術后并發癥發生率方面,兩組差異均無統計學意義(P>0.05),這與國內外相關報道相似[14-15]。
AEG較其他部位的胃癌更容易出現淋巴結轉移,獲取足夠的淋巴結可為腫瘤分期后的治療方案提供依據,腫瘤與近端切緣的距離可以評估腫瘤是否被完整切除。多項研究報道,機器人組能更徹底地清掃淋巴結,尤其對于一些BMI較高的患者[16–19]。胰腺上區淋巴結的清掃對D2根治術很重要,Suda等[20]和Kim等[18]認為機器人系統的機械臂有更高的自由度,在清掃胰腺上區淋巴結時能更加輕松地保護好胰腺和血管,減少出血和胰瘺。脾門淋巴結的清掃往往是難點,脾門血管的分支和變異較多,清掃淋巴結時容易損傷脾門血管和脾。有研究表明,機器人手術系統在完成保脾清掃脾門淋巴結時,可獲得更多的脾門淋巴結。我國的一項研究指出,膈下和下縱隔淋巴結的清掃,機器人組要優于腹腔鏡[15]。我們的研究結果顯示,兩組患者的淋巴結清掃數目和近端切緣長度差異均無統計學意義(P>0.05),這說明機器人和腹腔鏡均都能達到腫瘤根治性切除的預期結果。
本研究兩組患者術后隨訪2~83個月(中位隨訪29個月)。結果顯示,機器人組的術后復發轉移率(21.7%)和腫瘤相關死亡率(21.7%)均低于腹腔鏡組(36.7%,33.3%),但差異無統計學意義(P>0.05)。機器人組的3年無瘤生存率(74.1%)高于腹腔鏡組(65.4%),但兩組的無瘤生存曲線差異無統計學意義(P>0.05);機器人組的3年總生存率(79.5%)高于腹腔鏡組(73.0%),兩組的總生存曲線差異亦無統計學意義(P>0.05)。這表明機器人輔助AEG根治術的遠期預后不比腹腔鏡手術差。本研究還對影響Siewert Ⅱ/Ⅲ型AEG患者預后的影響因素進行了單因素和多因素分析,結果發現Siewert分型、T分期、N分期和手術切緣是影響患者術后無病生存期的獨立影響因素;年齡、TNM分期和腫瘤大小是影響患者術后總生存期的獨立影響因素。本研究說明了早發現、早診斷和早治療對改善Siewert Ⅱ/Ⅲ型AEG患者預后的重要性,且行根治性手術時一定要獲得足夠的切緣長度,保證切緣無殘留腫瘤細胞。
本研究為回顧性研究,無法完全排除一些偏倚,因此還需開展多中心前瞻性隨機對照研究來進一步驗證達芬奇機器人手術系統對Siewert Ⅱ/Ⅲ型AEG患者的近期和遠期療效。
達芬奇機器人手術系統具有3D鏡頭和10~15倍的高清視野,7個自由度的機械臂,可過濾手部震顫[20-21],能幫助術者輕松、精準地解剖一些操作困難的部位,而且學習曲線較腹腔鏡更短[22]。達芬奇機器人手術系統的不足為缺少觸覺反饋系統,且醫療費用昂貴。如今Senhance機器人手術系統的出現解決了以往機器人缺少觸覺反饋系統的問題。我們有理由相信隨著科技的進步以及國家對國產機器人的鼓勵政策,機器人手術系統的不足在未來均能得到改善。醫療機器人還將搭配越來越多的新技術,如5G、AR、人工智能和醫信融合等,配合醫生更好地完成手術[23]。
本研究顯示,對于治療Siewert Ⅱ/Ⅲ型AEG患者,達芬奇機器人與腹腔鏡具有相似的近期和遠期療效。Siewert分型、T分期、N分期和手術切緣是患者術后復發的影響因素;年齡、TNM分期和腫瘤大小是患者術后死亡的影響因素。對于Siewert Ⅱ/Ⅲ型AEG患者,應該早發現、早診斷,根據患者的具體情況,多學科聯合制訂治療方案,以改善患者的預后。
猜你喜歡
腹腔鏡外科雜志(2022年7期)2022-08-16 04:31:06
音樂探索(2022年2期)2022-05-30 21:01:37
河北畫報(2020年10期)2020-11-26 07:20:50
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
中國內鏡雜志(2017年2期)2017-03-20 16:18:12
腹腔鏡外科雜志(2016年11期)2016-06-01 12:10:09
腹腔鏡外科雜志(2016年9期)2016-06-01 12:10:07
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:46