柔性直流與風電協同的受端系統頻率調控方法
2021-07-02 01:01:50徐攀騰江守其
東北電力大學學報 2021年2期
朱 博,徐攀騰,劉 科,江守其
(1.中國南方電網有限責任公司超高壓輸電公司廣州局,廣東 廣州 510663;2.東北電力大學電氣工程學院,吉林 吉林 132012)
柔性直流輸電(Voltage Sourced Converter based HVDC,VSC-HVDC)系統能夠實現功率的四象限運行,可為弱電網或無源電網供電[1],采取柔性直流輸電和島內風力發電聯合構建島嶼電力系統,是向受端島嶼電力系統供電的一種有效解決方案.然而,以雙饋風機(Doubly Fed Induction Generator,DFIG)為主流機型的風電和柔性直流輸電系統慣量小,當發生線路故障、負荷突變等擾動時受端島嶼電力系統頻率波動大[2].如何利用風電機組和柔性直流輸電系統的調控能力,提高受端島嶼電力系統頻率特性,是國內外研究的熱點問題之一.
在DFIG參與電力系統調頻的控制策略方面,文獻[3]研究利用風機轉子旋轉儲能來實現慣性響應,文獻[4]利用儲能裝置補償風電場慣量進行輔助調頻,文獻[5-6]在DFIG中采用虛擬同步發電機(Virtual Synchronous Generator,VSG)控制實現了電網自同步,為電網提供了慣性支撐.以上方法主要是提高系統慣量特性,減少系統頻率變化率,無法調節穩態的頻率偏差.文獻[7]提出了一種結合超速備用與虛擬慣性的DFIG調頻控制方法,利用DFIG在超速減載方式獲得有功備用.文獻[8-9]通過調節DFIG槳距角,實現參與一次調頻的有功支撐.但以上方法以犧牲風電機組的風能捕獲能力為代價參與系統調頻,降低了風力發電的經濟性.
在柔性直流輸電參與系統頻率調節方面,文獻[10-11]將有功功率和頻率的下垂特性引入到傳統矢量控制中,通過調節換流站與交流系統的有功功率達到頻率調節的目的,但下垂控制無法快速響應系統的頻率變化.文獻[12]將VSG控制技術引入到柔性直流輸電系統,構建虛擬調速器模擬同步發電機的慣性響應和一次調頻特性,但基于VSG的控制仍然為有差調頻,無法實現受端電網頻率無差控制.
針對柔性直流輸電與風電供電的受端島嶼電力系統,在分析DFIG和VSC-HVDC有功功率調控性能的基礎上,設計了提高系統慣性和一次、二次頻率協調控制的總體方案.設計風電場附加頻率控制,通過超速減載控制完成系統一次調頻;依據頻率偏差進行換流站功率快速調整實現受端電力系統的VSG控制的二次調頻.基于Matlab/Simulink仿真平臺,構建了含風電機組、柔性直流輸電系統的受端島嶼電力系統,通過仿真分析對設計的控制策略性能進行驗證.
1 柔性直流向海島供電的系統結構
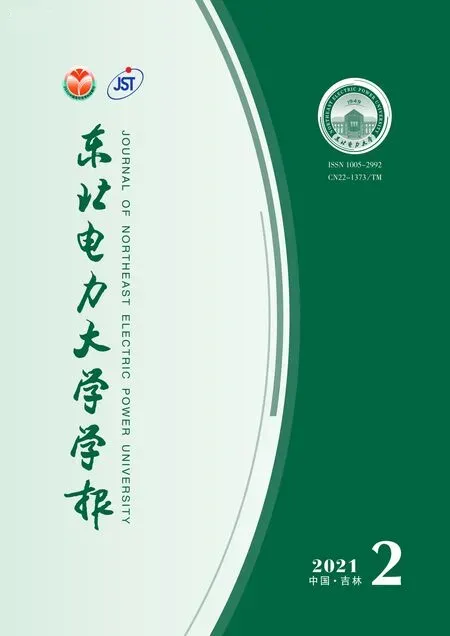
針對典型的受端島嶼電力系統,構建如圖1所示的海島供電系統,主要包括:與陸上連接的柔性直流輸電系統、島內風電場、無調頻備用的小型同步發電機組以及受端島嶼負荷.其中,柔性直流輸電系統由陸上送端換流站VSC1、島內受端換流站VSC2以及兩條海底電纜構成.
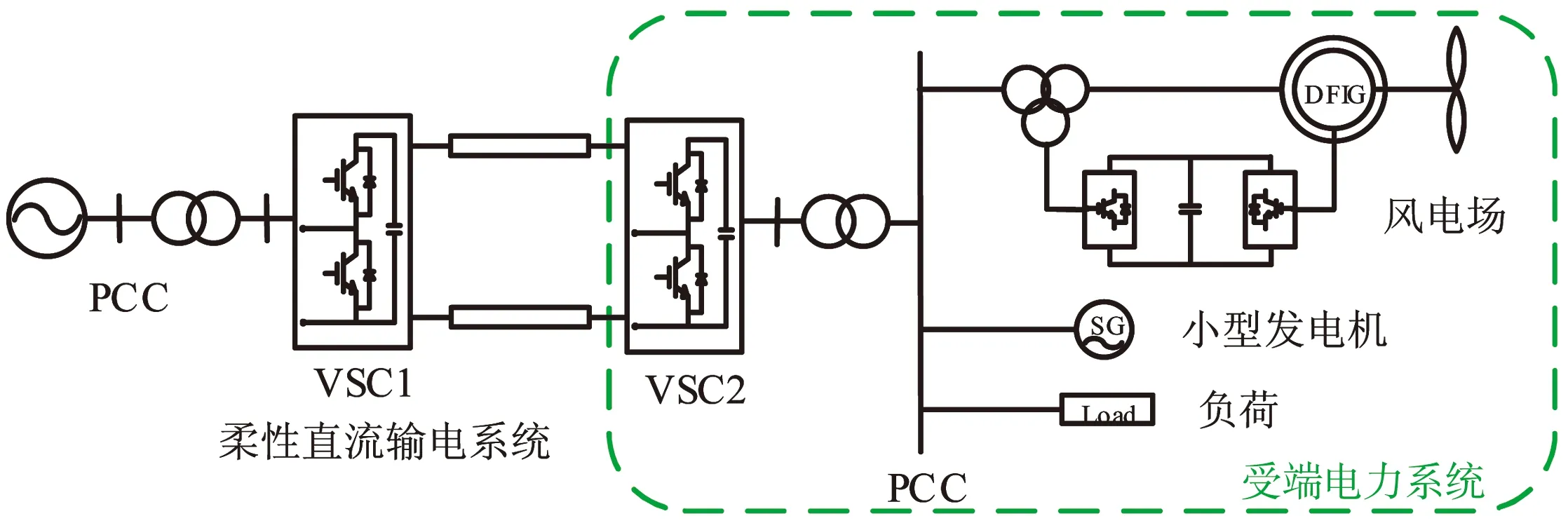
圖1 典型的受端島嶼電力系統拓撲結構
2 DFIG與VSC-HVDC協同調頻方案
為實現受端島嶼電力系統的一次、二次調頻,設計如下總體方案:當受端島嶼電力系統遭受擾動引起頻率突增或驟降時,利用DFIG風機轉子中儲存的旋轉動能和VSC-HVDC換流站子模塊電容儲存的能量抑制頻率變化,使DFIG和VSC-HVDC具備傳統機組的慣性響應特性.對系統頻率偏差進行判定,通過模擬常規同步發電機有功功率與頻率下垂特性,發揮DFIG有功調控能力,實現系統頻率的一次調整,使系統頻率在允許范圍內.如果系統頻率偏差超出設定范圍,通過快速調整VSC-HVDC系統輸送的有功功率,完成受端島嶼電力系統頻率的無差調節.
設計的DFIG和VSC-HVDC協同參與交流系統調頻運行示意圖如圖2所示.
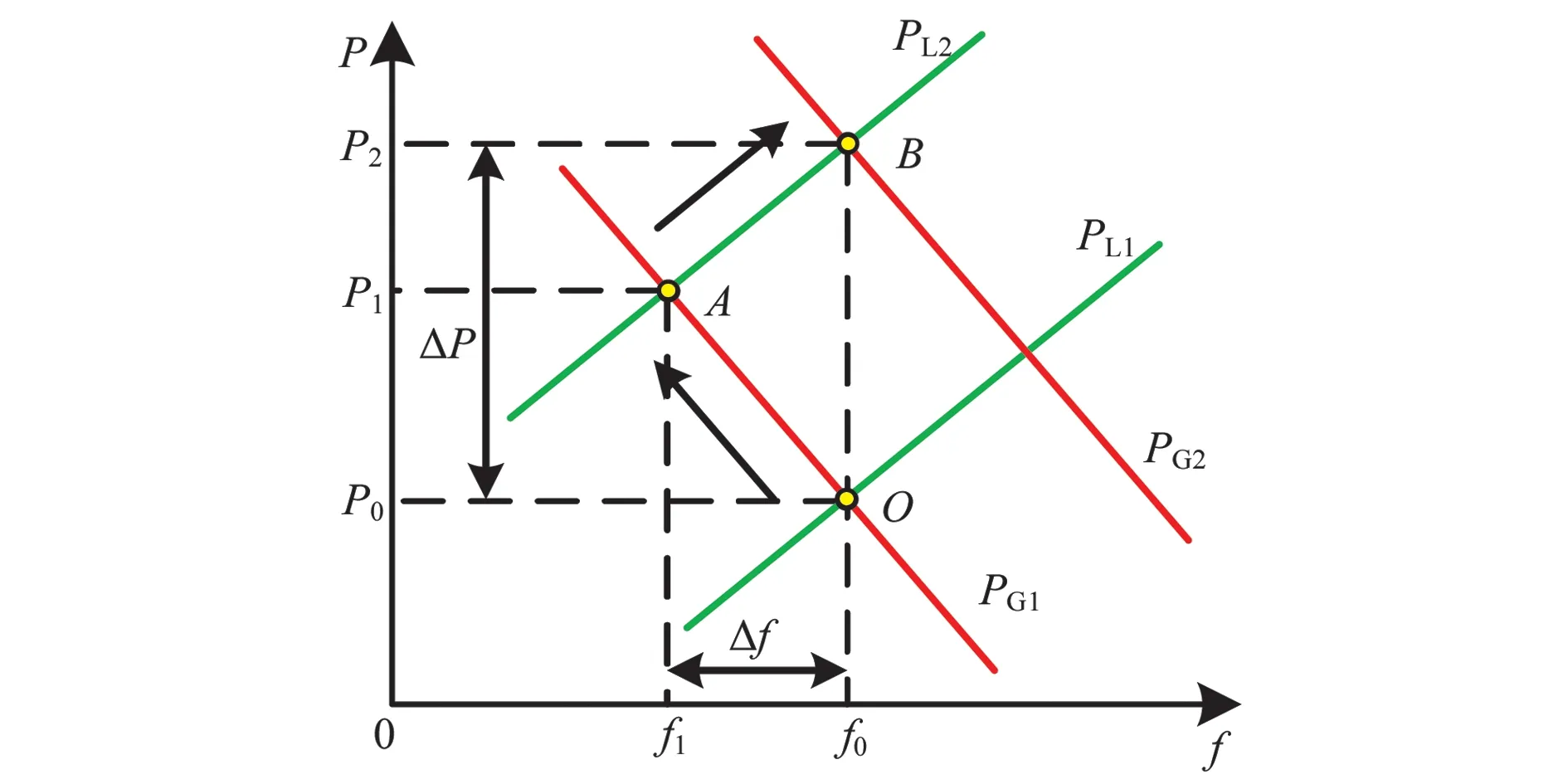
圖2 DFIG與VSC-HVDC調頻示意圖
在受端島嶼電力系統功率平衡時,系統處在穩態運行點O,即發電頻率特性曲線PG1與負荷頻率特性曲線PL1的交點.假設負荷突然增加,負荷頻率特性曲線由PL1上移到PL2,由于功率不平衡導致系統頻率下跌.此時,DFIG通過模擬調速器特性調整自身輸出功率,系統經過衰減振蕩達到新的平衡點A.由圖2所示,運行點A與運行點O的系統頻率差值Δf=f1-f0≠0,則DFIG進行了一次有差調頻.如果頻率偏差Δf超出允許范圍,需要VSC-HVDC進行二次調頻.VSC-HVDC增發有功功率ΔP,使發電頻率特性曲線由PG1上移到PG2,此時系統穩態運行點過渡到B點.運行點B對應的頻率為f0,則Δf=0,VSC-HVDC實現了交流系統頻率的無差控制.
3 協同調頻控制策略
根據提出的DFIG和VSC-HVDC參與島嶼電力系統慣性響應與一次、二次調頻的總體方案,協同調頻控制策略以系統頻率偏差為監測量,分別從風電場與柔性直流受端換流站展開設計,實現DFIG與VSC-HVDC的頻率協同控制.
3.1 DFIG控制策略
DFIG的轉子中存在一定的旋轉動能,大小為
(1)
公式中:J為轉動慣量;ω為轉子轉速.
因此可以利用DFIG轉子動能主動響應系統頻率變化,依據系統頻率變化率調整輸出有功功率.同時為了使得風電機組能夠提供持續的功率支撐,采取有功功率-頻率下垂控制進行頻率一次調整.擾動期間控制器調頻增發的有功功率可表示為
(2)
公式中:Δf為電網頻率和額定頻率f0的偏差;Kp、Kd分別為比例系數和微分系數.
DFIG的轉子動能僅能提供短暫的沖擊型功率支撐,若要實現DFIG參與電網的一次調頻,需要持續的有功輸出.根據海上風速較為緩和的特點,設定DFIG的轉子轉速大于最大功率跟蹤時的最優轉速,從而降低風力機組的捕獲風效率使機組減載運行,留出一定的備用容量來支持系統一次調頻.
DFIG增加的有功功率ΔPDFIG與其最大有功備用容量有關,關系為
(3)
當ΔPDFIG在DFIG的最大有功備用容量范圍內時,DFIG可以利用備用容量有效參與調頻;當ΔPDFIG超出最大有功備用容量范圍時,DFIG釋放完全部有功功率備用后,將不再參與系統頻率的調整.
圖3 具有附加頻率控制的一次調頻控制
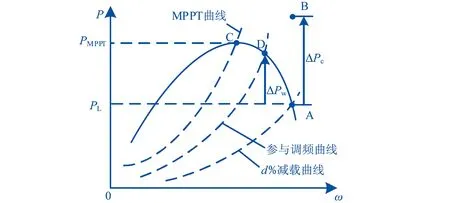
圖4 增速減載功率特性示意圖
DFIG的減載系數表達式如公式(4)所示,這意味著在不同風速下,風機可以通過增大轉子轉速使風電場始終在d%減載曲線上運行.式中,PMPPT為當前風速下的最大功率;PL為減載下的輸出功率.
(4)
在此基礎上設計具有附加頻率控制的一次調頻控制器如圖3所示.在風電場穩態運行時,控制DFIG運行在超速減載狀態.當檢測到出現頻率偏差,通過附加頻率控制計算出DFIG有功功率參考值增量ΔPDFIG,即可得到轉子側換流器控制中實際的有功功率參考值P*=ΔPDFIG+PL.
系統負荷突然增加時DFIG增速減載過程如圖4所示.調頻前DFIG運行在d%減載曲線上(假設在某一確定風速下時為點A),輸出功率為PL;當系統頻率發生變化時電磁功率變化ΔPc,由于ΔPc大于DFIG捕獲的機械功率,轉子將減速釋放動能;在轉速降低到最優轉速(點C)之前,DFIG捕獲的機械功率將增加ΔPw(點A到點D),而電磁功率則由點B減小到點D,此時DFIG運行在新的減載曲線上達到平衡.新的減載率為
(5)
為此,設計如圖5所示的具有附加頻率控制的DFIG控制策略.
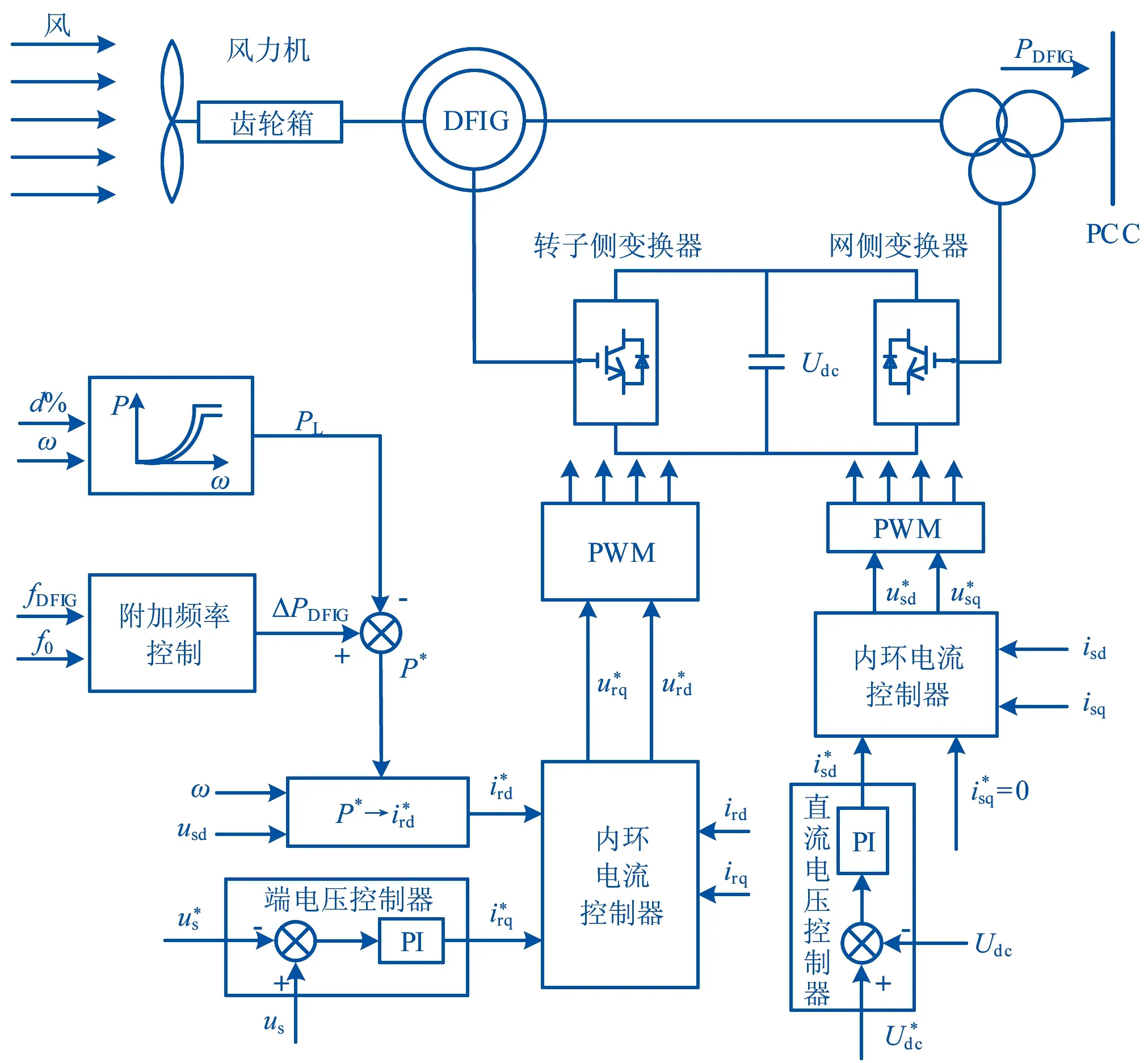
圖5 具有附加頻率控制的DFIG控制
網側變流器與轉子側變流器通過直流母線實現解耦控制,并使轉子轉速與電網頻率解耦,實現DFIG的變速運行.網側變流器分別獨立控制網側輸出電流的D軸分量isd*和Q軸分量isq*,實現對直流側電壓Udc和無功電流isq的控制,保證轉子變流器以及雙饋勵磁系統的可靠穩定運行.轉子側變流器通過控制注入的轉子電流的D軸分量ird*和Q軸分量irq*實現對定子有功功率P和端電壓us的解耦控制.轉子側變換器的有功類控制采用具有附加頻率控制的一次調頻控制策略,使DFIG主動響應電網頻率變化.
3.2 VSC-HVDC受端換流站控制策略
當受端島嶼電力系統受到擾動,VSC-HVDC不僅要與DFIG共同實現慣性響應,還要承擔系統二次頻率調節任務.為了模擬同步發電機的虛擬慣量和阻尼特性,VSC-HVDC受端換流站控制器采用模擬二階同步發電機模型的VSG控制技術.
假設同步發電機的極對數為1,其等效轉子運動方程為
(6)
公式中:Tm、Te、Td分別為同步發電機的機械轉矩、電磁轉矩和阻尼轉矩;Pm、Pe分別為同步發電機的機械功率和電磁功率;J為同步發電機的轉動慣量;D為同步發電機的阻尼系數;ω為是電網的同步角速度,對其進行積分即可得到電網電壓的相位角δ;ω0是同步發電機的額定角速度.
穩態下,得到
Pe=Pm-Dω0(ω-ω0).
(7)
由此,阻尼系數使直流輸電系統具有阻尼特性,同時描述了有功和頻率的下垂關系,能夠對頻率偏差作出一次調整.當電網中出現大幅擾動,頻率偏移量往往超出合理的范圍,需要引入對頻率的二次調整.
電力系統二次調頻的功率方程為
(8)
公式中:K為負荷頻率調節系數;ΔPL為系統負荷增量;ΔPG為系統發電功率增量.可以看出,調整發電功率使ΔPG=ΔPL,即可實現頻率的無差調節.于是設計二次調頻時發電功率變化量為
(9)
公式中:ki為積分系數.同步發電機通過控制原動機的的機械功率來調節有功功率輸出,將發電功率變化量引入有功-頻率調節器中,即:
(10)
公式中:Pref為換流器輸出的有功參考值.將式公(10)代入公式(6),得到電磁功率Pe為
(11)
由此,設計VSC-HVDC受端換流站如圖6所示的加入頻率偏差判定環節的二次調頻策略,通過頻率偏移的嚴重性判斷是否投入頻率無差調節.
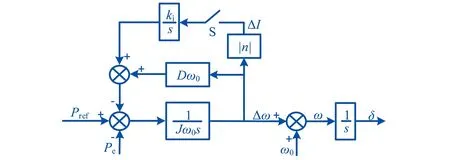
圖6 基于VSG的二次調頻控制

因此,設計的基于VSG的VSC-HVDC受端換流站控制策略如圖7所示.其中,無功電壓控制模擬同步發電機的勵磁方程,給內環電流控制器提供D軸與Q軸電流指令值.
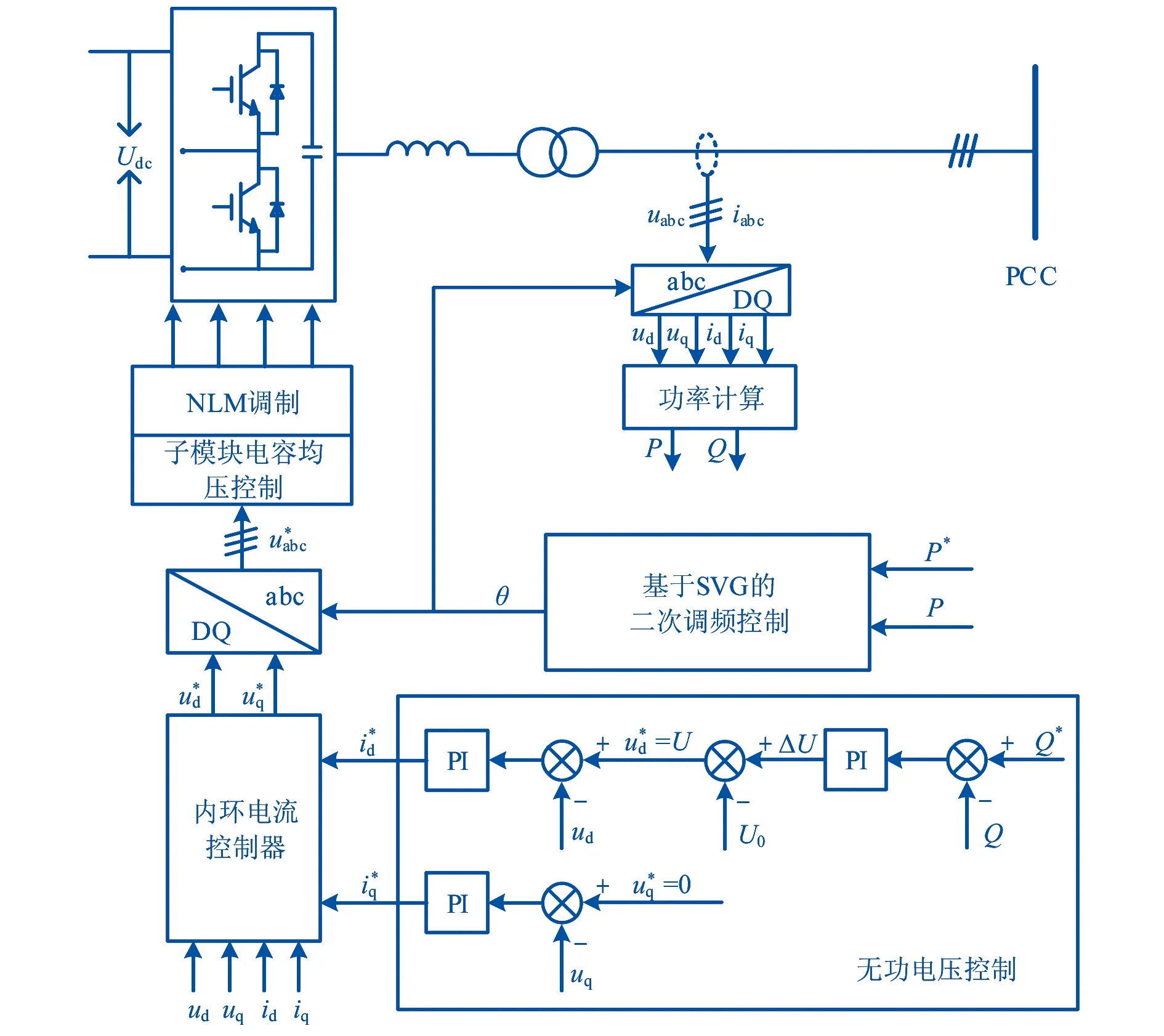
圖7 基于VSG的VSC-HVDC受端換流站控制
4 仿真驗證
4.1 仿真系統
為了驗證DFIG和VSC-HVDC協同調頻控制策略的有效性,基于Matlab/Simulink搭建了如圖1所示的受端島嶼電力系統.以下分別從DFIG、VSC-HVDC單獨調頻以及DFIG與VSC-HVDC協同調頻三個方面驗證所提控制策略的慣性響應特性與一次、二次調頻性能.
仿真系統中,2個VSC-HVDC換流站主回路參數及容量相同,系統主要參數如表1所示.VSC1接入大電網,采用定直流電壓控制和定無功功率控制.VSC2接入海島電網,可供采用的控制方式有:(1)定有功功率和定交流電壓的傳統矢量控制;(2)傳統VSG控制;(3)具有二次調頻能力的VSG控制,其中頻率偏移量在閾值C為0.004 pu.設定仿真中風電場當前風速低于額定風速,取9.8 m/s,風電場由DFIG單機聚合模型模擬,可采用的控制方式為是否具有附加頻率控制的矢量控制.

表1 VSC2及DFIG系統主要參數
4.2 仿真分析
算例1:為驗證DFIG的慣性響應與一次調頻效果,VSC2采用定有功功率和定交流電壓的傳統矢量控制策略,在5 s時負荷有功增加50 MW.在DFIG不同控制下系統頻率動態過程和DFIG出力動態變化過程的仿真結果,如圖8所示.
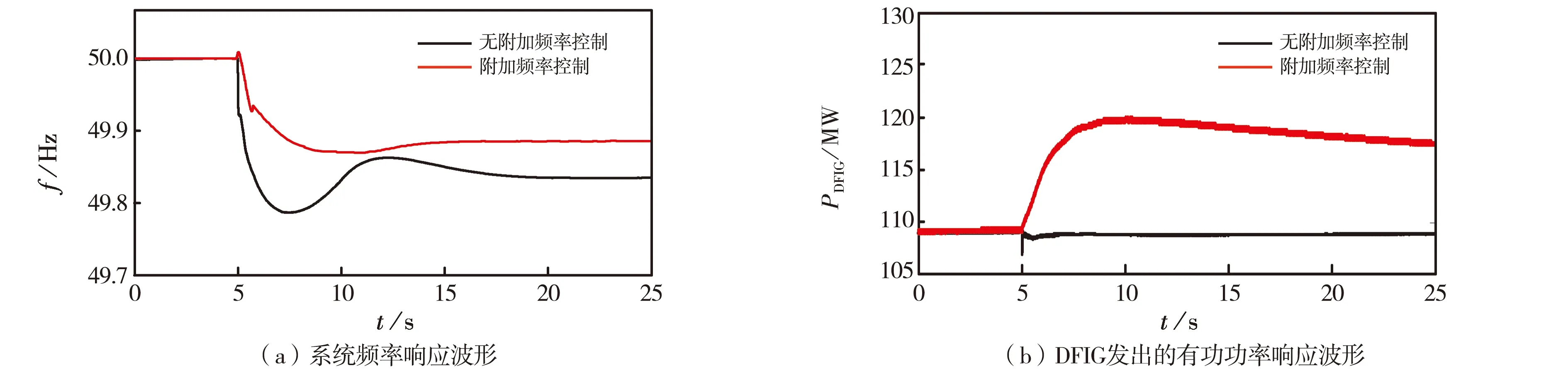
圖8 DFIG在不同控制下的仿真結果
由圖8可知,未采用附加頻率控制時,擾動后DFIG輸出有功功率沒有顯著變化,表明無附加頻率控制時其不具有調頻作用.采用附加頻率控制時,擾動后DFIG增發了有功功率,并且與未采用附加頻率控制時相比,系統頻率下降較為緩和,系統頻率偏差在穩態時較小,表明采用附加頻率控制使系統慣性水平提高,通過增發功率實現一次調頻,有效改善了系統的頻率特性.
算例2:為驗證設計的VSG二次調頻控制的性能,DFIG采用無附加頻率控制的傳統矢量控制,在1s時海島的負荷有功增加100 MW.換流站采取傳統矢量控制策略和具有二次調頻VSG控制策略(屏蔽頻率偏差判定環節)仿真結果,如圖9所示.
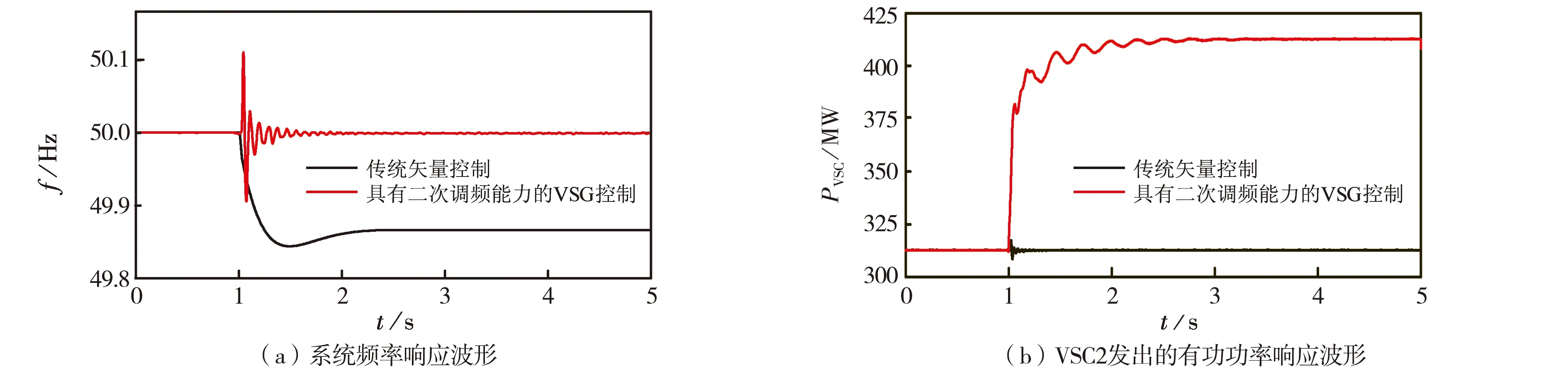
圖9 VSC2在不同控制下的仿真結果
由圖9可知,采用傳統矢量控制VSC2發出有功功率沒有明顯變化,表明傳統矢量控制的換流站不參與系統調頻.采用具有二次調頻能力的VSG控制時,擾動后VSC2發出的有功功率迅速增加,系統頻率穩定于額定頻率,表明所提VSG控制的VSC-HVDC受端換流站能夠實現頻率無差控制,且存在類似同步發電機的振蕩過程.
算例3:為驗證DFIG與VSC-HVDC協同調頻的性能,DFIG采用具有附加頻率控制的傳統矢量控制策略,VSC2分別采用有二次調頻能力的VSG控制策略和傳統的VSG控制策略,在5s時海島的負荷有功增加50MW,25s時海島的有功負荷再次增加50MW.仿真結果如圖10與圖11所示.
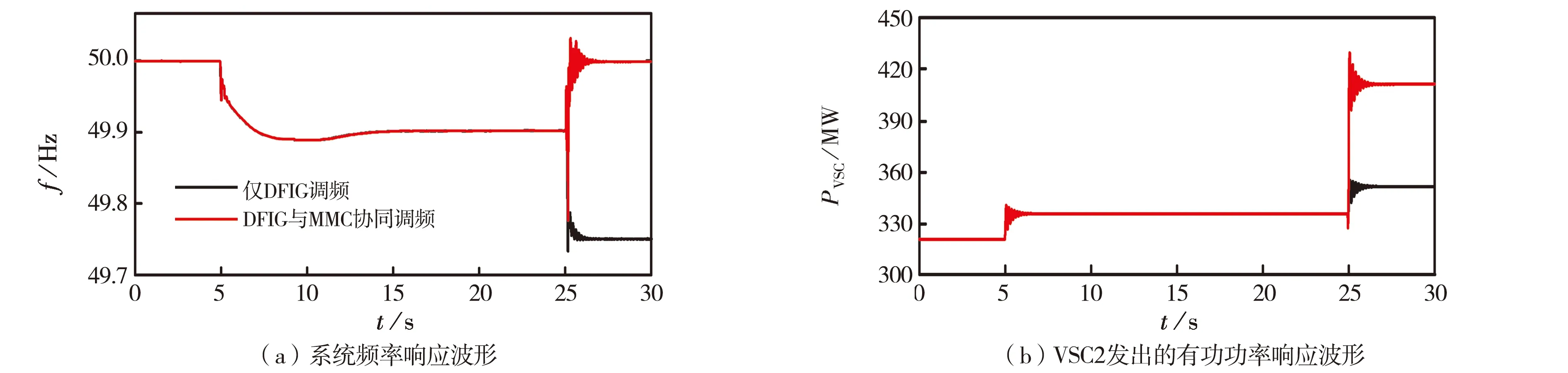
圖10 VSC2參與二次調頻前后的仿真對比結果
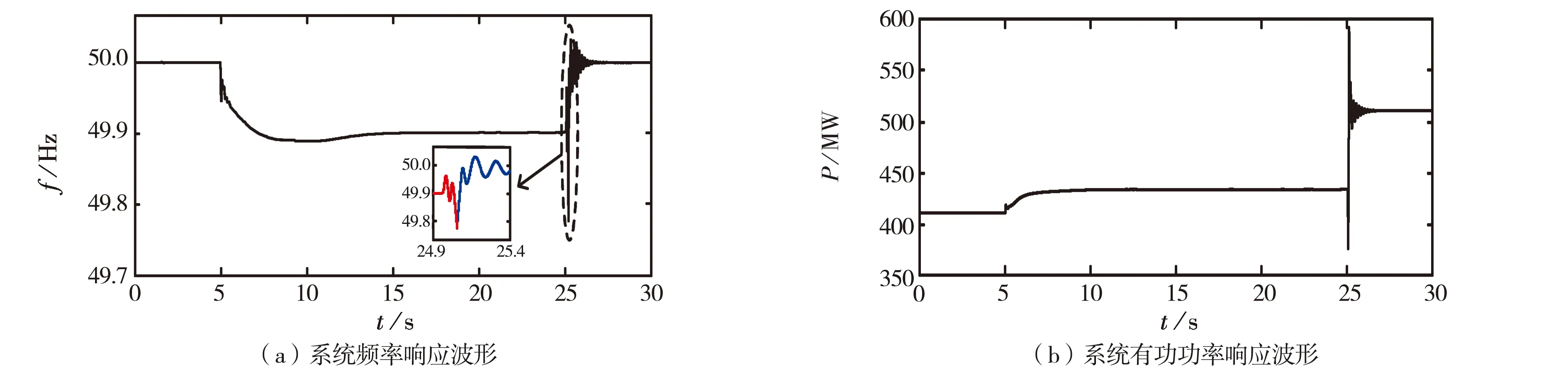
圖11 DFIG與VSC2協同調頻的仿真結果
圖10為VSC2參與二次調頻前后的仿真對比結果,驗證了提出的頻率偏差判定控制的有效性.在5 s~25 s期間,兩種控制下系統頻率與VSC2發出的有功功率曲線一致,這是因為頻率偏差量ΔI=0.1 Hz<0.2 Hz,VSC2未觸發二次調頻環節.而25 s時發生的擾動后,采用傳統VSG控制的系統頻率產生了一個約0.25 Hz的頻率偏差,而采用VSG控制的VSC2能將頻率穩定控制在額定值上,證明所提頻率判定環節能夠準確有效地判定頻率偏差量(ΔI=0.25 Hz>0.2 Hz),通過快速增發有功功率實現系統頻率的二次調整.
另外,VSC2發出有功功率在5 s之后有小幅上升,這表明了前面所述VSC2的VSG控制中的阻尼系數承擔了有限的一次調頻任務.
圖11為DFIG與VSC2協同控制策略仿真結果,驗證了所設計的協同調頻的有效性.5 s之后,DFIG的一次調頻發揮作用,向系統增發了有功功率;25 s之后,VSC2向系統傳輸的有功功率大幅增加,實現了系統頻率的二次調整.由頻率動態軌跡可以看到,頻率出現一定跌落后恢復到穩態值,表明VSC2二次調頻控制系統檢測到頻率偏差量切換了控制策略,實現了由一次調頻到二次調頻的控制.
5 結 論
在挖掘DFIG和VSC-HVDC有功調節潛力的基礎上,設計了提高受端島嶼電力系統頻率響應能力的協調控制總體方案,并在此基礎上,提出了具有慣性響應能力的換流站與風電協同的受端系統頻率控制策略,可有效降低頻率波動幅值及穩態誤差,提高系統安全穩定運行的能力.通過仿真驗證了所提控制策略的有效性,并得出如下結論:
(1)在較小干擾工況下,風電場與換流站的慣性響應控制延緩了系統頻率的變化,并通過VSC的頻率偏差判定環節控制VSC閉鎖二次調頻,僅靠DFIG進行一次調頻,在保證頻率控制在合理范圍的前提下,提高了小干擾下的頻率質量與系統頻率穩定性.
(2)在較大干擾狀況下,VSC投入二次調頻,實現了頻率無差調整,避免了頻率的嚴重偏移同時保證了風電場運行的經濟性.協同調頻控制通過受擾后系統頻率變化量進行自主頻率調節,充分發揮了柔性直流系統與風電場的調頻能力,對提高受端島嶼電力系統的安全穩定運行具有重要意義.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26