近鉆頭伽馬成像儀測量結果環境校正方法研究
2021-06-30 07:46:22李洪強王瑞和
石油鉆探技術 2021年3期
關鍵詞:測量
李洪強, 王瑞和
(1.中國石油大學(華東)石油工程學院,山東青島 266580;2.中石化勝利石油工程有限公司鉆井工藝研究院,山東東營 257000)
世界范圍內不少油田已進入開發中后期,開始開發厚度1.00 m左右的薄油藏。為提高薄油藏的開發效果和效益,需要采用水平井開發。為保證水平段在薄油藏中穿行,需要采用近鉆頭隨鉆測量儀測量井眼軌跡參數和地質參數。近鉆頭隨鉆測量儀位于鉆頭的后方,測量點與鉆頭的距離小于1.00 m,可以及時反映地層和井眼軌跡的變化,應用效果好,使用成本相對較低,適用于薄油藏地質導向鉆井[1–7]。
近鉆頭伽馬成像儀是在常規動力鉆具與鉆頭之間增加一個獨立的測量短節,該測量短節是測量鉆頭附近的井斜角和自然伽馬值并傳輸至地面的隨鉆測量儀器[8–11]。目前,盡管國內外已經研制出了近鉆頭成像儀,但仍處于邊應用邊改進優化階段,還不是非常成熟,其中主要的缺陷有2個:1)近鉆頭伽馬成像測量環境校正方法需改進;2)近鉆頭處劇烈振動導致儀器可靠性較差。盡管人們已經認識到近鉆頭伽馬成像儀的偏心對測量結果有較大的影響,但由于鉆柱在井下的運動存在不確定性,難以實時確定鉆進中儀器的位置。以往處理近鉆頭伽馬數據時都是假設近鉆頭伽馬成像儀在井眼中居中,未考慮近鉆頭伽馬成像儀偏離井眼軸線(偏心)的影響。對于均質地層,近鉆頭伽馬成像儀在偏心情況下,鉆鋌衰減、鉆井液衰減、鉀基鉆井液對測量結果的影響沒有得到及時修正,標識地層變化的上下伽馬曲線經常出現分離現象[10–13]。對于上下伽馬曲線分離,地質工程師會誤認為地層發生變化。在地層發生變化時,上述因素也會導致傾角計算出現誤差[14–17]。由此可見,對近鉆頭伽馬成像數據進行環境校正是處理近鉆頭伽馬成像數據的重要步驟。筆者從近鉆頭方位伽馬測量原理出發,分析了影響近鉆頭伽馬成像儀測量結果的環境因素及影響規律,建立了校正原始測量數據的方法,以得到更能真實反映地層特征的測量數據。
1 近鉆頭伽馬成像儀與地層的接觸關系
1.1 近鉆頭伽馬測量方法
近鉆頭伽馬成像儀是在常規動力鉆具和鉆頭之間增加一個長約1.00 m的無磁鉆鋌,在該無磁鉆鋌的外壁上開槽,槽中安裝有測量井斜角和判斷旋轉方位的傳感器、自然伽馬傳感器、無線數據短傳、電池等模塊(見圖1)。在動力鉆具后方安裝有一個無線接收模塊,接收近鉆頭伽馬成像儀傳輸的近鉆頭井斜角和伽馬成像測量數據,然后通過常規鉆井液脈沖信號將近鉆頭井斜角和伽馬成像數據傳輸至地面。鉆進中,由鉆井液驅動動力鉆具帶動近鉆頭伽馬成像儀旋轉,在鉆頭持續鉆入地層過程中,使用磁通門或陀螺儀將井筒360°圓周均勻分隔為8個或16個計數扇區,在一定的時間段內統計每個扇區進入伽馬傳感器的伽馬射線次數,形成環繞井筒均勻分區對應的多個扇區伽馬計數值。
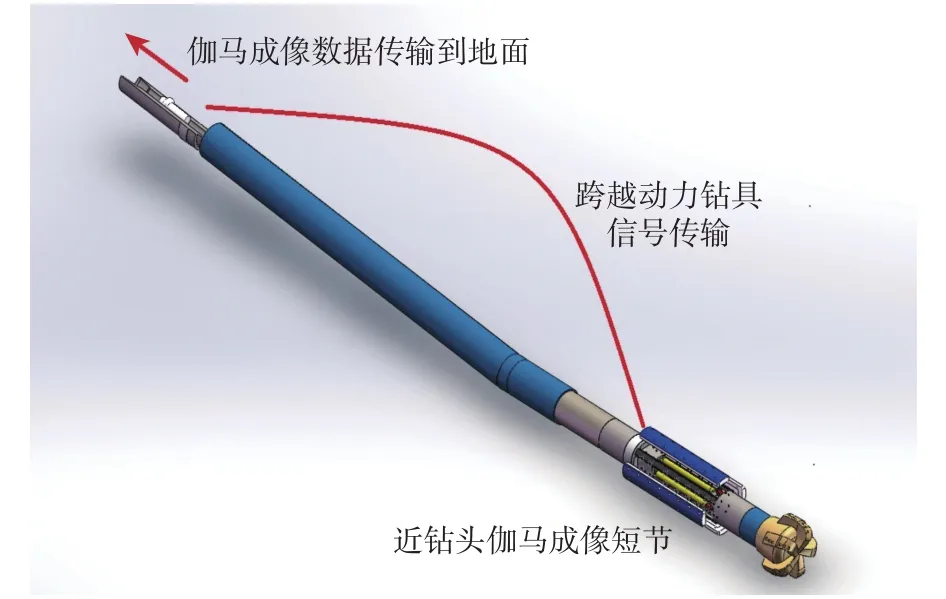
圖1 近鉆頭伽馬成像測量系統示意Fig.1 Schematic diagram of near-bit gamma imaging system
這些扇區的伽馬計數值反映了環繞井筒巖石中的伽馬射線水平。伽馬計數扇區劃分方式如下:在井斜角小于切換角時,成像數據描述的是按照方位信息顯示的對應關系,如圖2(a)所示;在井斜角大于切換角時,成像數據描述的是環繞井筒測量得到的上下左右等成像數據,如圖2(b)所示。為利于測量人員認識井筒形狀,該切換角選擇隨鉆測量重力工具面和磁場工具面轉換時的井斜角度,一般為3°~5°。圖2中內圈、中圈和外圈分別表示上下方位伽馬、4象限方位伽馬和8象限方位伽馬成像扇區對應的井筒范圍。
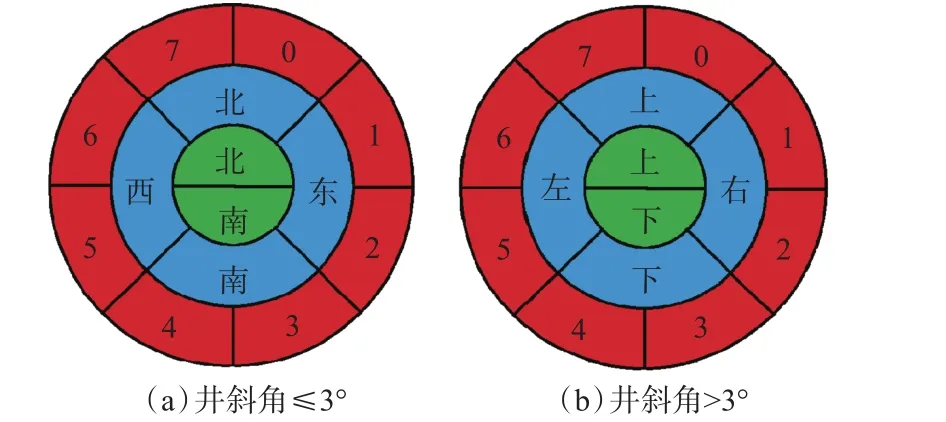
圖2 不同井斜狀態下顯示的伽馬扇區劃分Fig.2 Division of gamma sectors at different well deviations
近鉆頭伽馬成像儀測得多個扇區的數據經壓縮后,短程跨越動力鉆具傳輸至常規MWD,進而上傳至地面,經解碼形成各個扇區的伽馬數據集,然后按照井筒位置形成二維伽馬成像圖譜或立體三維隨鉆伽馬成像彩色井筒。垂直井段伽馬成像圖譜二維展開以方位為基準,定向井段和水平段伽馬成像圖譜二維展開以重力工具面為基準。
1.2 伽馬成像采集與地層接觸關系
圖3所示為鉆頭穿越地層界面的不同形式。在圖3(a)中,鉆頭自下而上從砂巖層(伽馬值小)進入泥巖層(伽馬值大),井眼軌跡與地層界面同時存在水平和方位上的傾角。在圖3(b)中,鉆頭自上而下從砂巖層進入泥巖層,井眼軌跡與地層界面僅存在水平上的傾角。
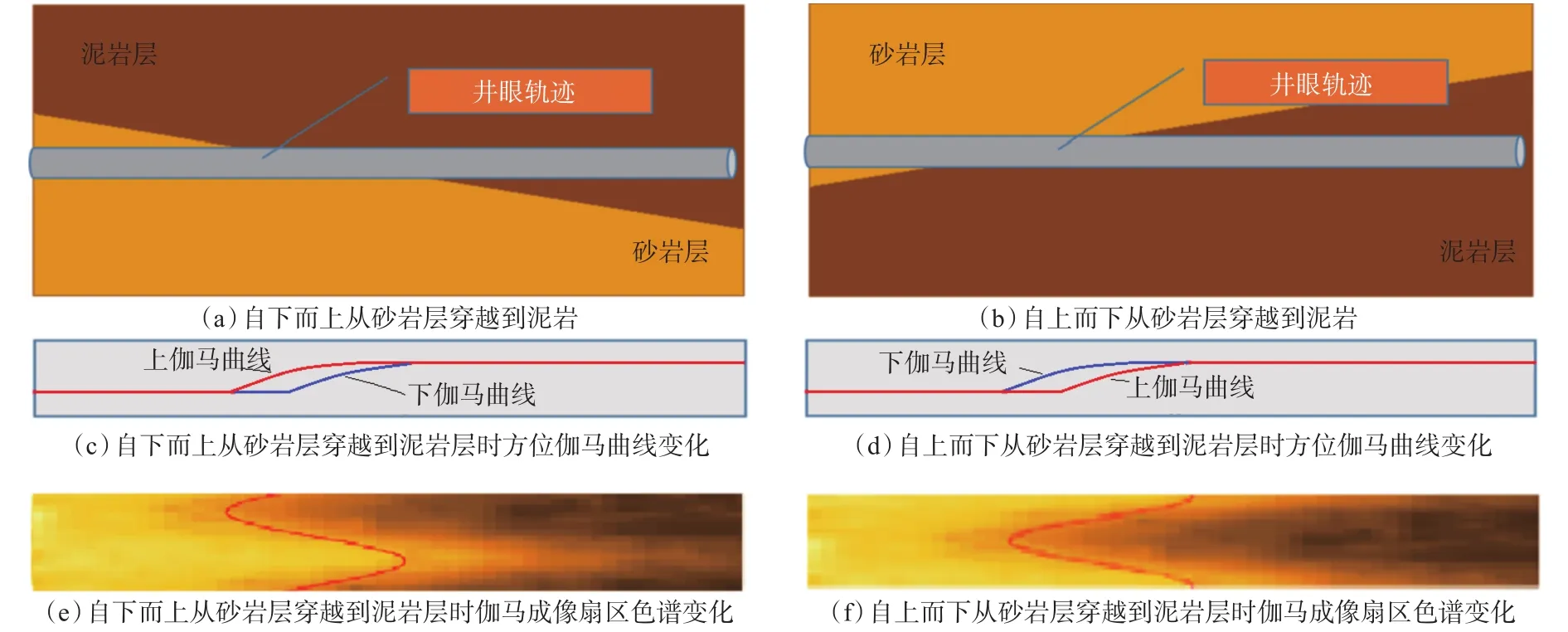
圖3 不同方式進入地層時的伽馬測量數據形態Fig.3 Data form of gamma measurement when the imager enters the formation in different ways
對于圖3(a)所示情況,伽馬曲線體現以下的變化:在砂巖中上下方位伽馬曲線重合顯示較低的伽馬值;穿越界面時,上方位伽馬曲線(紅色線)先變高,下方位伽馬曲線(藍色線)保持不變,從而上下方位伽馬曲線出現分離現象;隨著近鉆頭伽馬成像儀繼續深入地層界面,下伽馬曲線也逐漸變高,一直到上下方位伽馬扇區全部進入泥巖,2條方位伽馬曲線趨于一致,顯示為高伽馬值,如圖3(c)所示。對于圖3(b)所示情況,上下方位伽馬曲線的變化如圖3(d)所示,上下伽馬曲線都是從低變高,穿越界面時曲線也發生了分離。圖3(d)與圖3(c)的不同之處是,穿越界面時下伽馬曲線先于上伽馬曲線變高,待全部進入泥巖中后,上下方位伽馬曲線吻合顯示高伽馬值。從上述分析可知,上下伽馬曲線分離和變化的先后順序可以呈現近鉆頭伽馬成像儀自上而下或自下而上穿越地層界面的現象。方位伽馬曲線的分離順序給出了鉆頭穿越地層界面的特征,但是當地層與井眼軌跡的交互除了在水平上存在傾角,同時在方位上也存在傾角時,無法根據方位伽馬曲線判斷地層左右的傾斜。此時,伽馬成像測量將顯示出其優點。
對于不存在左右偏斜的情況(見圖3(b)),當近鉆頭伽馬成像儀自上而下從砂巖層進入泥巖層,各扇區伽馬值變高的時機不同,伽馬成像圖譜呈現的是居中向左箭頭的形狀(見圖3(f))。對于存在左右偏斜的情況(見圖3(a)),伽馬成像圖譜呈現正弦分布形狀(見圖3(e))。由此可見,伽馬成像圖譜既能夠體現水平方向上的變化,又能體現方位上的變化,說明伽馬成像圖譜可以立體展現井眼軌跡與地層的交互關系。這樣地質工程師在水平段既可以依據伽馬成像圖譜進行井斜調整(增降井斜),也可以調整方位(扭方位),控制水平段在儲層中穿行。伽馬成像圖譜的形狀變化為判別井眼軌跡穿越油藏的類型和計算地層傾角提供了初始依據。
利用上述特征,在近鉆頭伽馬成像儀進入地層界面的時候,利用實時上傳的井斜角和伽馬成像數據可以實時計算地層傾角。近鉆頭伽馬成像儀與地層傾角、井斜角的關系可表示(見圖4)為:
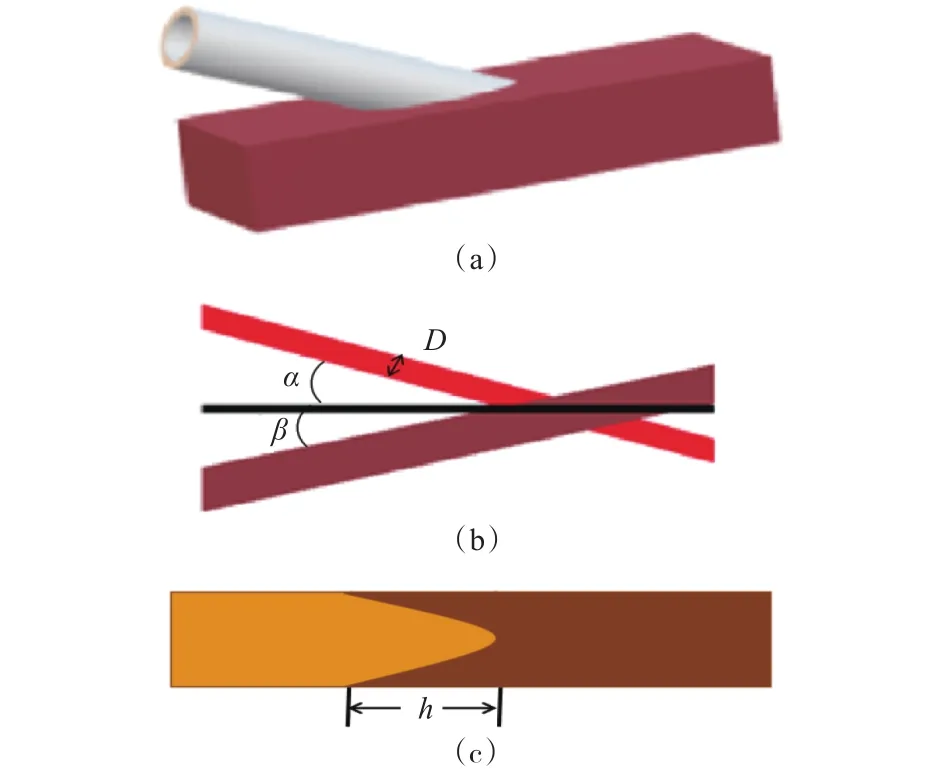
圖4 近鉆頭伽馬成像儀與地層傾角、井斜角的關系Fig.4 Relationship of the near-bit gamma imager with formation dip and well deviation
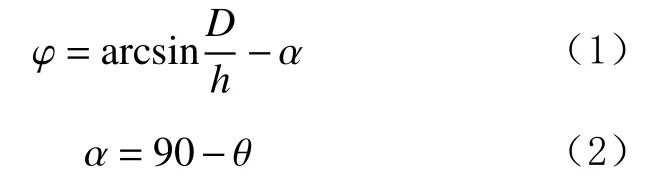
式中: φ 為地層傾角,(°);θ為近鉆頭井斜角,(°);D為井眼直徑,mm;h為伽馬成像數據形成的箭頭高度,mm。
原始測量圖譜受到近鉆頭伽馬成像儀所處環境的影響會使h不能真實反映地層傾角的變化,因此需要針對鉆鋌衰減、鉆井液衰減、鉀基鉆井液修正,以及近鉆頭伽馬成像儀的偏心進行校正,以得到較為準確的井壁伽馬測量數據集。在此基礎上,利用先進的計算機圖形識別方法或數學算法得到h,進一步利用式(1)和式(2)求得地層傾角 φ 。
2 近鉆頭伽馬成像測量影響因素分析與校正方法
對于近鉆頭伽馬成像數據的處理,通常是設定近鉆頭伽馬成像儀在井眼中居中,然后經過鉆鋌衰減、鉆井液衰減、鉀基鉆井液修正得到反應巖性變化的自然伽馬計數值,用來識別巖性和計算穿越地層的傾角,以便更加精確地控制井眼軌跡在儲層中穿行。但是在實際使用過程中發現一個現象,即近鉆頭伽馬成像儀穿越預測均質地層時,上下方位伽馬曲線發生了分離。這種上下伽馬曲線的分離會使地質工程師產生疑惑,難以分清是預測地層時出錯還是伽馬測量出現誤差。在排除儀器測量精度和地層的影響后,地質工程師開始懷疑測量儀器的偏心對方位伽馬測量的影響,即當方位伽馬在井筒中不居中時,方位伽馬各個扇區受環境的影響不一致,這會導致均質地層中方位伽馬曲線出現分離的異常現象。
分析近鉆頭伽馬成像儀在井筒中不居中的影響因素,對近鉆頭伽馬成像儀進行偏心校正是實際應用過程中解決和糾正上下伽馬曲線分離、修正伽馬成像圖譜和精確計算地層傾角的重要步驟。
2.1 偏心對近鉆頭伽馬測量的影響
近鉆頭伽馬成像儀安裝在動力鉆具前方,由于后方存在動力鉆具彎殼體,其與井筒的軸線形成一定的夾角,偏離中心位置,如圖5所示。在復合鉆進時,轉盤帶動上部鉆柱和動力鉆具進而帶動近鉆頭伽馬成像儀在井筒中復合旋轉,方位伽馬傳感器敏感面相對井筒的距離在井下動態變化,這時無法確定近鉆頭伽馬成像儀在井筒中的位置,難以對近鉆頭伽馬測量數據進行修正。但在滑動鉆進時,動力鉆具工具面處于相對穩定狀態,井下鉆具在井筒中也處于相對穩定狀態。特別是定向工程師開始準備調整井眼軌跡時,往往采用滑動鉆進,動力鉆具工具面相對井筒穩定,近鉆頭伽馬成像儀在井筒中一個相對穩定的位置旋轉。
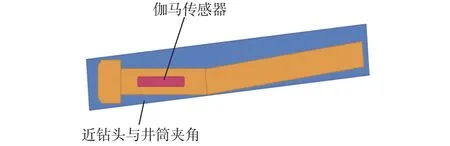
圖5 近鉆頭伽馬成像儀在井筒中的位置Fig.5 Position of the near-bit gamma imager in the wellbore
圖6中的剖面分別代表近鉆頭伽馬成像儀在定向模式下滑動鉆進時的4種常見姿態:降斜鉆進(見圖6(a))、增斜鉆進(見圖6(b))、向右扭方位鉆進(見圖6(c))和向左扭方位(見圖6(d))。近鉆頭伽馬成像儀開有4個槽分別安裝伽馬傳感器(綠色),方位伽馬井斜/扇區方位判斷傳感器(紅色)、井下鋰電池(黃色)、伽馬數據處理電路和天線傳輸電路等(藍色),圖中棕色部分為鉆鋌內外環空中的鉆井液。滑動鉆進時,鉆柱和動力鉆具的外殼在井筒中相對靜止,動力鉆具中的螺桿帶動近鉆頭伽馬成像儀和鉆頭進行旋轉鉆進。由于動力鉆具工具面擺放位置不同,處于不同定向模式的近鉆頭伽馬成像儀在井筒中的位置相對穩定。
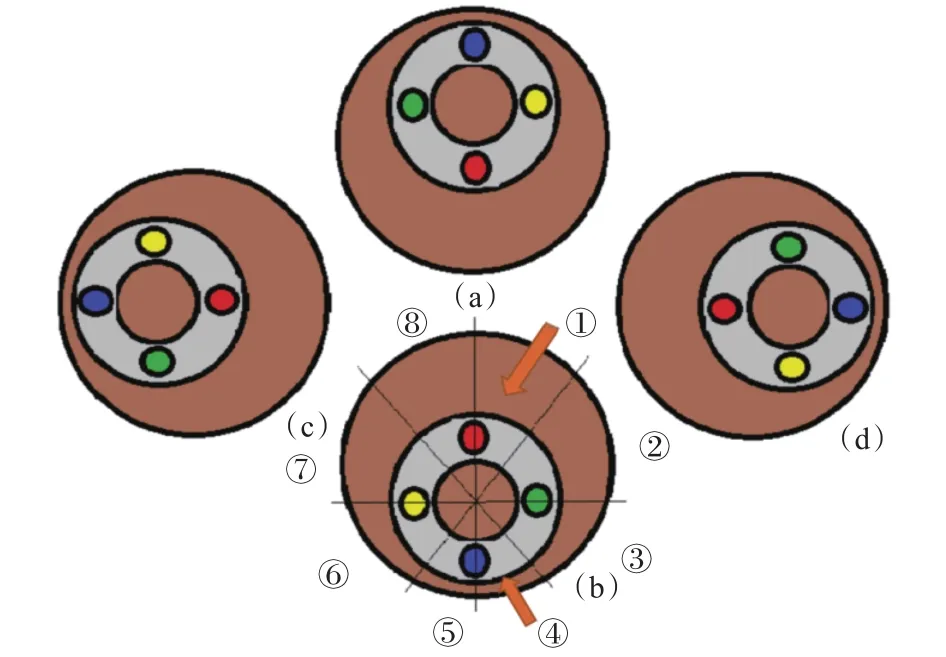
圖6 定向模式下的近鉆頭伽馬儀器在井筒中偏心位置示意Fig.6 Eccentric position of the near-bit gamma imager in the wellbore in the directional mode
從圖6可以看出,在特定的定向模式下,伽馬傳感器(紅色)繞測量儀器的軸心旋轉,伽馬傳感器到井壁的距離不斷發生變化。可見,伽馬傳感器和井壁的距離與動力鉆具工具面和旋轉測量時的扇區都有關系。將圖6(b)(增斜)中的鉆鋌劃分為8個象限,可見由于偏心的影響,地層中的伽馬射線穿越井筒到達伽馬傳感器的距離不一樣,由于伽馬射線在鉆井液中會衰減,在象限1受到鉆井液的影響明顯大于象限4。為此需要準確分析得到上述不同測量扇區伽馬傳感器相對井壁距離的變化,對由于距離變化造成的衰減進行補償。
筆者以常用的?171.4和?203.4 mm近鉆頭伽馬成像儀器為例進行分析。?171.4 mm近鉆頭伽馬成像儀器適用于?215.9 mm 井眼,?203.4 mm 近鉆頭伽馬成像儀器適用于?311.1 mm井眼。對于圖6(b)所示的滑動鉆進,在動力鉆具工具面靜止不動的情況下,近鉆頭伽馬傳感器與井壁的距離可利用式(3)求出。

式中:L為近鉆頭伽馬傳感器到井壁的距離,mm;D為井眼直徑,mm;d為近鉆頭伽馬成像儀的直徑,mm; β為伽馬傳感器測量角度,(°);l0為近鉆頭伽馬成像儀中心與井眼中軸線的距離,mm。
對于圖6(b)所示情況,式(3)中的D和d為已知量,l0可以按照井下鉆具組合計算出造斜時近鉆頭伽馬成像儀中心與井眼中軸線的距離,這樣就可以利用式(3)計算出不同測量角度下近鉆頭伽馬傳感器與井壁的距離。利用式(3)分別計算?171.4 mm近鉆頭伽馬成像儀在?215.9 mm 井眼和?203.4 mm近鉆頭伽馬成像儀在?311.1 mm井眼中滑動鉆進造斜時,伽馬傳感器與井壁的距離,結果如圖7所示(近鉆頭伽馬成像儀測量角度為180°時最貼近井壁)。
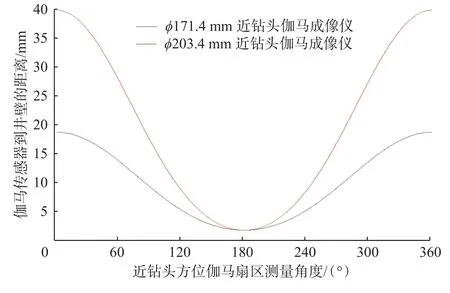
圖7 不同扇區近鉆頭方位伽馬成像儀與井壁的距離Fig.7 Distance between the near-bit gamma imager at different sectors and the borehole wall
從圖7可以看出,近鉆頭伽馬成像儀的每個扇區和井壁之間的距離都是不同的。當這些空間充滿鉆井液時,巖石中的伽馬射線將會經過不同厚度的鉆井液到達伽馬傳感器,因而鉆井液造成每個扇區伽馬計數的衰減程度也不同。
上述情況僅描述了圖6中近鉆頭定向增斜鉆進的情況,其他滑動鉆進姿態和動力鉆具工具面角相關。各個扇區近鉆頭伽馬傳感器與井壁的距離也會根據動力鉆具工具面角進行偏移計算。根據滑動鉆進不同姿態下的動力鉆具工具面角,利用式(3)可以計算得到不同鉆進姿態下每個扇區測量點與井壁的距離。
導致自然伽馬射線受到偏心影響的因素主要有2個:1)地層伽馬射線通過一定厚度鉆井液造成的衰減;2)不同厚度的鉀基鉆井液對伽馬計數的干擾。下面將進一步討論2個因素的影響。盡管鉆鋌壁厚對伽馬射線也有衰減作用,但由于近鉆頭伽馬成像儀本體的厚度一定,鉆鋌對伽馬射線的衰減為一個常數,可以在近鉆頭伽馬成像儀刻度的時候進行補償,不在此討論鉆鋌壁厚的衰減。
2.2 偏心下鉆井液衰減的影響
鉆井液衰減是當地層中的伽馬射線進入伽馬碘化鈉晶體前,被鉆井液阻擋造成的變化。在實驗室中,標準伽馬刻度源和伽馬傳感器之間通過更換不同密度和厚度的鉆井液,可以測量得到伽馬射線鉆井液衰減修正圖版(見圖8)。
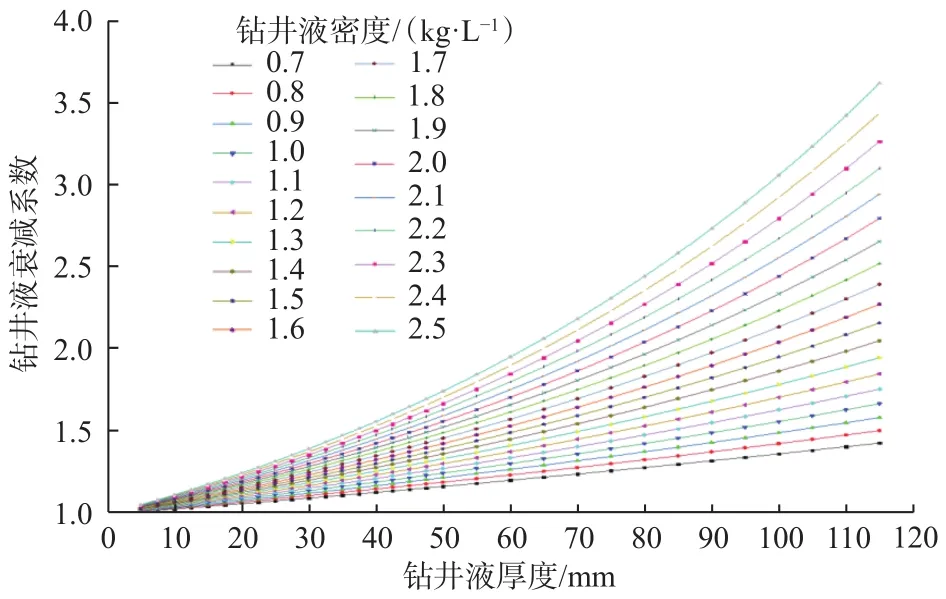
圖8 伽馬射線鉆井液衰減修正圖版Fig.8 Correction chart of gamma-ray for attenuation in drilling fluids
參照美國休斯頓大學的經驗方法,對伽馬射線受鉆井液密度和厚度的影響規律進行試驗擬合,得到式(4)及其對應的擬合系數:

式中:YGR為伽馬鉆井液衰減系數;a1一般取1;b1的擬合值為0.00454;ρ為鉆井液的密度,kg/L;δ為伽馬成像傳感器與井壁之間環空的鉆井液厚度,mm。
在滑動鉆進模式下,進行造斜時,其動力鉆具工具面角為0°。將式(3)代入式(4),可以得到圖9所示近鉆頭伽馬成像儀不同測量角度下的衰減修正圖版。
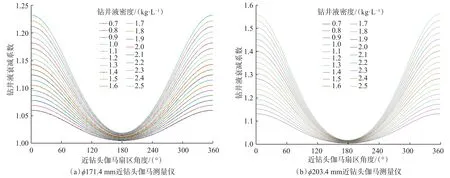
圖9 ?171.4/?203.4 mm近鉆頭伽馬鉆井液衰減修正圖版Fig.9 Correction chart of ?171.4/?203.4 mm near-bit gamma for attenuation in drilling fluids
由圖9可知:在動力鉆具工具面相對穩定時,近鉆頭方位伽馬不同測量角度受鉆井液的影響程度不同,鉆井液密度越大,與井壁的距離越大,衰減越厲害;?171.4 mm近鉆頭伽馬成像儀的鉆井液衰減系數為1.00~1.23;?203.4 mm近鉆頭伽馬成像儀的鉆井液衰減系數為1.00~1.56。可見,在同樣伽馬計數的情況下,鉆井液會影響測量結果。這也是在鉆井液密度較大的情況下,在均質地層中方位伽馬曲線產生分離的主要原因。
2.3 偏心下鉀基鉆井液修正
為了防止井壁坍塌,也會用到鉀基鉆井液,其氯化鉀含量不低于5%。鉆井液中的鉀離子同樣釋放射線進入伽馬傳感器。為了修正鉆井液中鉀離子的干擾,需要研究偏心條件下鉀基鉆井液對伽馬測量值的影響。在實驗室,標準伽馬刻度源和伽馬傳感器之間通過更換不同密度和厚度的鉆井液,測量伽馬值并進行擬合,得到式(5)及其對應系數:

式中:Yk為鉀基鉆井液干擾修正值,API;wKCl為氯化鉀含量;a2,b2和c2為系數,擬合得到其值分別為–0.019,0.441和 0.016。
分別選用氯化鉀含量為1%~15%的鉀基鉆井液進行試驗,測量得到了不同厚度鉀基鉆井液對應的鉀基鉆井液伽馬修正值補償圖版(見圖10)。
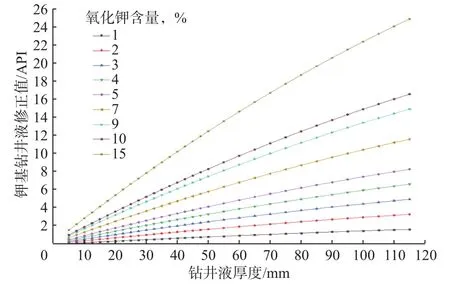
圖10 鉀基鉆井液補償修正圖版Fig.10 Correction chart of compensation in potassiumbased drilling fluid
同樣將式(3)代入式(5)計算得到偏心條件下近鉆頭伽馬成像儀不同測量角度下鉀基鉆井液的修正圖譜(見圖11)。
2.4 偏心因素綜合校正
由圖9和圖11可知,在滑動鉆進偏心情況下,可以得到不同測量角度下的鉆井液衰減系數和鉀基鉆井液伽馬補償數值。所以在滑動鉆進時,當原始測量得到的不同測量角度下的伽馬數據傳輸到地面時,可以針對性地對其進行偏心校正。校正公式為:
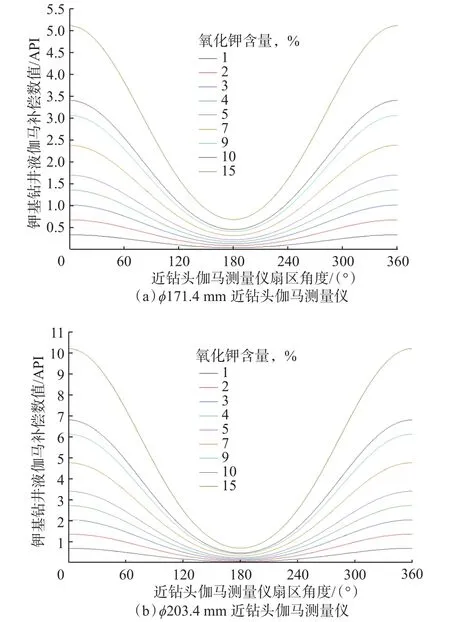
圖11 ?171.4/?203.4 mm近鉆頭伽馬鉀基鉆井液修正圖譜Fig.11 Correction chart of ?171.4/?203.4 mm near-bit gamma in potassium-based drilling fluids
3 試驗驗證
為了驗證上述校正方法和偏心修正圖譜的準確性,需要更換不同的鉆井液,并反復進行伽馬傳感器在井筒中不同位置的成像掃描試驗。由于無法在實鉆井中進行多次反復測量,為了驗證上述推論的正確性,設計隨鉆伽馬成像模擬試驗裝置,利用該裝置進行偏心伽馬成像掃描試驗。通過模擬試驗分析伽馬成像圖譜在偏心情況下受環境因素的影響,并對偏心條件下的鉆井液衰減進行校正,以驗證上文偏心校正方法的準確性。
隨鉆伽馬成像模擬試驗裝置由隨鉆伽馬成像傳感器旋轉掃描控制裝置(見圖12(a))和按照扇區組成的模擬井筒(圖12(b))組成。模擬井筒按照上部低自然伽馬放射性和下部高自然伽馬放射性的方式調整組合成一個45°的地層夾角,模擬井筒中部空間充滿鉆井鉆井液。隨鉆伽馬成像傳感器旋轉掃描控制裝置中的傳感器為方位伽馬傳感器,它可以按照設定的鉆鋌尺寸、鉆時和轉速對模擬井筒進行螺旋掃描(見圖12(c)),方位伽馬傳感器測量得到的各個不同扇區伽馬計數值可以實時傳輸至計算機進行處理。
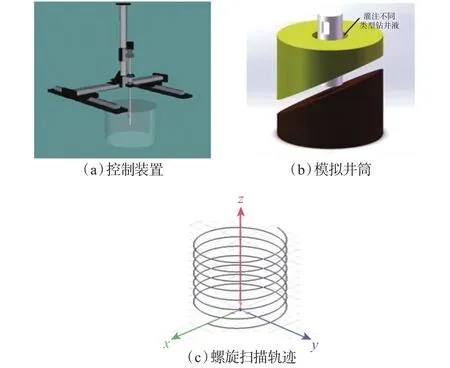
圖12 伽馬成像測量掃描模擬試驗裝置Fig.12 Experimental device for the simulation of gamma imaging measurement and scanning
模擬井筒注滿密度為1.1 kg/L的水基鉆井液,將模擬井筒伽馬高放射性部分沖北放置,方位伽馬傳感器在井筒中心居中旋轉掃描時,可以得到16個扇區的伽馬曲線(見圖13(a))和伽馬成像圖譜(見圖13(b))。伽馬成像圖譜從南面分割展開,中部為北,如圖14(a)所示,對伽馬成像圖譜進行邊緣探測后可以得到高度h1,然后利用式(1)計算得到地層傾角為 45.1°。
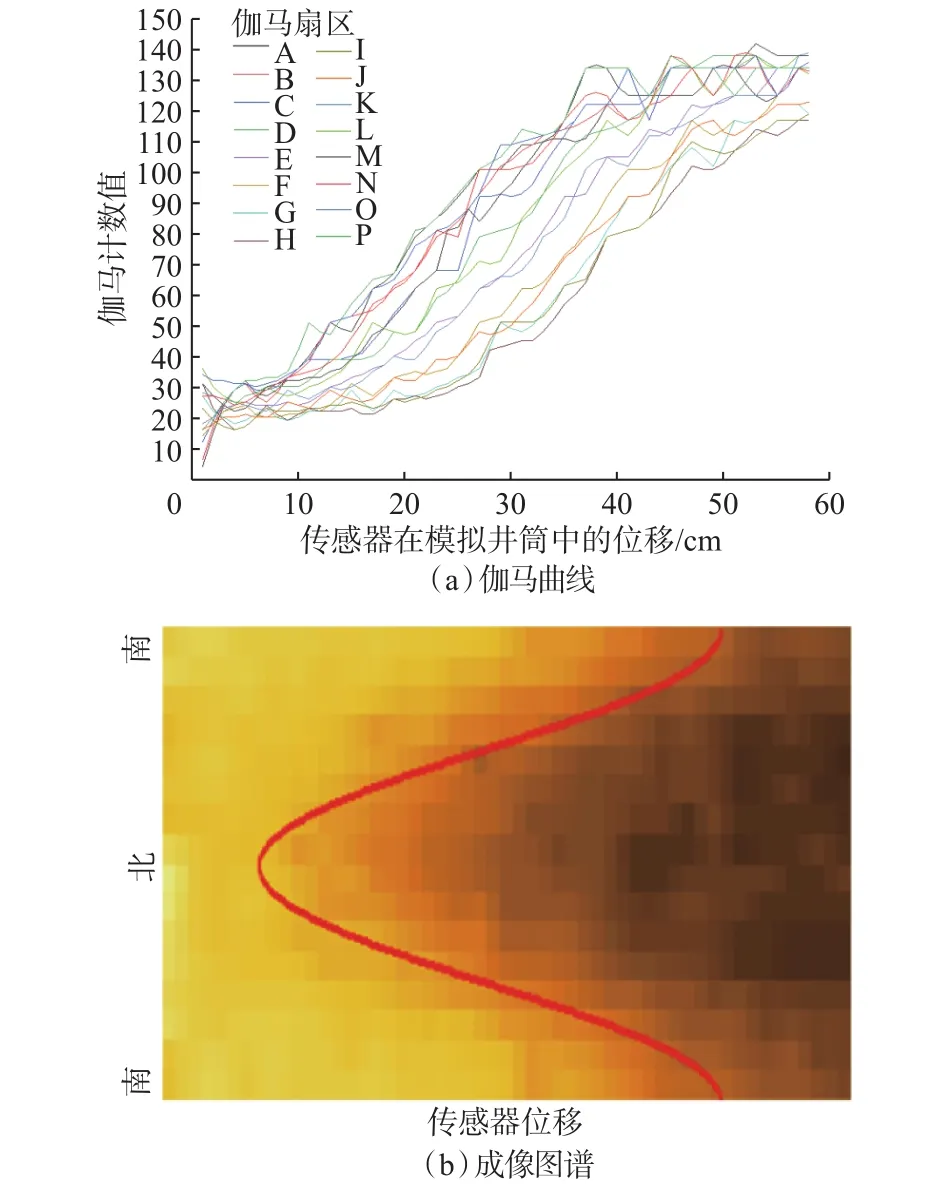
圖13 居中掃描得到的16扇區伽馬曲線和成像圖譜Fig.13 Gamma ray curves and imaging spectra of 16 sectors obtained from the centered scanning
當方位伽馬傳感器貼近北部對井筒進行掃描時,其北部離井壁近,南部離井壁遠,測量得到的伽馬成像圖譜如圖14(b)所示。貼近高伽馬井筒部分受到鉆井液衰減影響較小,按照同樣的邊緣追蹤得到的高度h2明顯變小,計算得到地層傾角為40.3°,與地層真實傾角的誤差為–4.7°。通過對比圖14(a)和圖14(b)發現,對同一井筒,方位伽馬傳感器居中和偏離井筒軸線掃描得到的 圖譜高度不一樣,依照偏離井筒軸線掃描得到的圖譜高度計算的地層傾角偏離了地層的真實傾角。

圖14 居中掃描、偏心掃描和偏心修正后的伽馬圖譜Fig.14 Comparison of gamma spectra obtained from centered scanning, eccentric scanning, and eccentric correction
按照式(6)對偏離井筒中軸線掃描得到的伽馬成像圖譜(見圖14(b)進行修正,修正后的圖譜如圖14(c)所示。按照同樣的邊緣追蹤原則得到的h3和居中測量的h1(見圖14(a))趨于一致,計算得到的地層傾角為44.8°,與地層真實傾角的誤差為–0.2°。由以上試驗可知,近鉆頭伽馬成像儀中心偏離井筒中軸線會對測量結果產生影響,利用其計算的地層傾角存在較大的誤差,利用上文的校正方法對偏心情況下的測量結果進行校正后,計算出地層傾角的誤差很小,說明上文的校正方法可靠。
4 結論及建議
1)在近鉆頭伽馬成像儀中心偏離井筒中軸線的情況下,不同扇區伽馬傳感器與井壁的距離存在差異,需要針對近鉆頭伽馬成像儀和井筒的尺寸分析計算伽馬傳感器與井壁的距離。
2)在近鉆頭伽馬成像儀中心偏離井筒中軸線的情況下,鉆井液密度以及其中氯化鉀含量都會對原始伽馬計數產生較大影響。在沒有進行綜合環境校正的情況下,使用原始伽馬扇區測量數值識別地層和計算地層傾角,會出現較大的偏差。
3)采用文中提出的近鉆頭伽馬成像儀測量環境校正方法,可以有效校正偏心條件下的近鉆頭伽馬成像圖譜,準確計算地層傾角,校正后的圖譜更能顯示地層的真實情況。
4)文中的校正方法是對相對穩定的滑動定向鉆進的近鉆頭伽馬成像圖譜進行校正,但是當井下存在較為復雜的井下蝸動、近鉆頭伽馬傳感器繞井筒復合公轉等現象時,還需對實時井徑進行測距以得到更準確的補償修正。
5)為了更加直觀地理解和分析鉆頭鉆遇的儲層,需要進一步提高近鉆頭伽馬成像測量的分辨率,增加近鉆頭實時超聲井徑測量、研究實時三維數字化井筒重建和實時地層評價技術。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
