近鉆頭伽馬高精度實時成像技術研究與應用
2021-06-30 07:46:22李繼博錢德儒鄭奕挺吳金平
石油鉆探技術 2021年3期
李繼博, 錢德儒, 鄭奕挺, 張 衛, 吳金平
(1.頁巖油氣富集機理與有效開發國家重點實驗室,北京 102206;2.中國石化石油工程技術研究院,北京 102206)
隨著國內外油氣勘探開發進入中后期,新探明儲量大多處于邊緣地區,儲層含量少、分散、超薄,復雜的油藏地質結構使勘探開發難度大幅增加,對井眼軌跡控制精度的要求也越來越高[1]。隨著隨鉆錄井、地質導向等測量工具在鉆井中的大量應用,伽馬數據成為區分地層巖性必須使用的資料之一[2]。常規MWD/LWD由于探測器安裝位置距離鉆頭通常在10 m以上,獲取的測量數據存在較大延遲,降低了隨鉆決策和調整的及時性[3–4]。由于無法及時判斷所鉆地層的傾角和巖性,影響了井眼軌跡的控制精度,在復雜油藏開發中后期,該問題日趨明顯。
近鉆頭地質導向技術將傳感器安裝在盡量靠近鉆頭的位置,從而可以更及時地獲得地層信息,國內外油服公司先后研發了近鉆頭地質導向系統[5–6]。由于工具越靠近鉆頭,所受到的振動、壓力、沖擊、沖蝕等越嚴重,給參數采集和系統設計帶來很大難度;同時,如何在鉆具旋轉、不規則振動和強沖擊的環境下實現高精度伽馬成像,也是該項技術需要解決的關鍵問題。為此,筆者根據方位伽馬成像測井方法和機電一體化設計理論,研究了近鉆頭伽馬成像系統的成像測量方法和關鍵技術,設計了近鉆頭伽馬成像工具,開發了地面實時成像系統,為近鉆頭伽馬高精度實時成像技術在薄油層、傾角變化快地層的應用提供了技術支持。
1 近鉆頭伽馬成像系統
地層巖石中含天然放射性核素(鈾系、釷系、鉀),其衰變時產生不同能量的伽馬射線。地層巖石的自然伽馬放射性主要是由鈾、釷和鉀的含量決定的。近鉆頭伽馬成像測井是將伽馬射線探測器和定向傳感器同時安裝在位于鉆頭和螺桿之間的鉆鋌內部,并采用背面屏蔽、側向開窗的方式來定向探測地層中某一扇區內總的自然伽馬射線強度,隨著井下鉆具的旋轉掃描,可以獲取全井眼不同扇區地層的伽馬射線強度變化圖[7],進而反映地層的巖性變化(見圖1)。
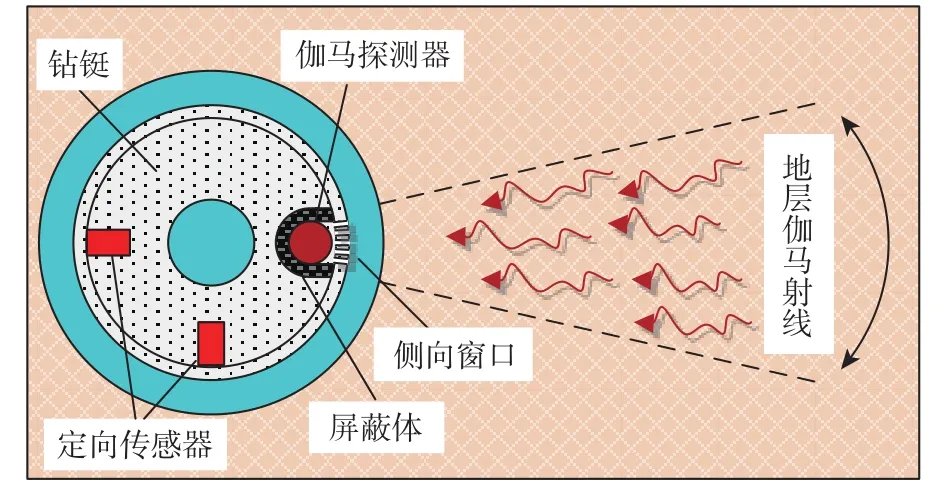
圖1 近鉆頭伽馬成像測井原理Fig.1 Principle of near-bit gamma imaging logging
近鉆頭伽馬成像系統主要由近鉆頭測量短節、接收短節、隨鉆測量系統和地面接收成像設備等部分組成[8–10]。首先,測量短節測量地層方位伽馬、井底溫度、井斜角和鉆頭轉速等數據,通過無線短傳通道將數據跨螺桿傳輸至接收短節;然后,接收短節將接收到的近鉆頭數據經過處理后發送給井下隨鉆測量系統,并借助鉆井液壓力脈沖上傳至地面接收成像設備中,供地質導向軟件進行成像顯示分析(見圖2)。地質導向軟件對已鉆地層進行判斷和解釋,并及時調整井眼軌跡,從而達到提高儲層鉆遇率的目的。

圖2 近鉆頭伽馬成像系統組成Fig.2 Composition of a near-bit gamma imaging system
近鉆頭伽馬成像系統的所有參數測量功能均能通過測量短節實現,主要技術指標如下:1)井眼控制參數。復合鉆進造斜率9°/30m,定向鉆進造斜率17°/30m,定向鉆進最大狗腿度為 17°/30m。2)測量參數。伽馬成像測量范圍0~500 API,實時8扇區存儲16扇區成像,動態井斜角0°~180°,動態井斜角精度±0.5°。3)工作環境參數。耐溫150 ℃,耐壓105 MPa,工作時間不短于 200 h。4)測量點距鉆頭距離。伽馬探測器0.50 m,井斜角傳感器0.70 m,無線短傳距離不小于11.50 m。
2 隨鉆伽馬成像測量關鍵技術
近鉆頭伽馬成像系統的測量短節外側分布有伽馬射線探測器,提供分區方位測量。旋轉鉆井時,短節以二分之一圓周、八分之一圓周或十六分之一圓周為單位對全井壁進行掃描測量,并連續記錄測量數據,然后將數據以電磁波形式通過測量短節發射天線跨螺桿發送給接收短節,接收短節將數據壓縮打包,通過隨鉆測量系統的鉆井液脈沖器發送至地面。
近鉆頭伽馬隨鉆成像工具裝在螺桿馬達兩端,測量短節在螺桿馬達與鉆頭之間,能夠跨螺桿與接收短節實現短距傳輸,并且提供足夠的空間存儲傳感器測量的數據。接收短節能夠實現數據的接收及其與隨鉆測量系統的通訊,同時提供足夠的空間存儲接收到的數據。伽馬成像測量主要包括高轉速伽馬成像、動態井斜角計算方法、地層相對傾角計算方法和跨螺桿無線傳輸等關鍵技術。
2.1 高轉速伽馬成像
伽馬成像短節對地層圓周的不同扇區分別進行測量,獲得圓周不同扇區的數據集合。系統開發過程中,應使晶體探頭體積和屏蔽層厚度最大化,探頭外側鉆鋌壁厚最小化,以實現伽馬靈敏度最大化的目的。鉆柱旋轉時,以井眼高邊為成像測量零點,系統最高測量精度是能實現至少每隔22.5°測量一次伽馬數據,并進行記錄。
伽馬探測器和工具面磁傳感器在伽馬成像測量鉆具內的布局為:1)伽馬探測器的伽馬敏感區域背向地層的內側,采用伽馬屏蔽材料填充,以降低地層伽馬射線作用于伽馬探測器背部的強度;2)2個工具面傳感器垂直布置于測量鉆具內(見圖3),伽馬測量扇區、時間與伽馬計數的關系如圖4所示。
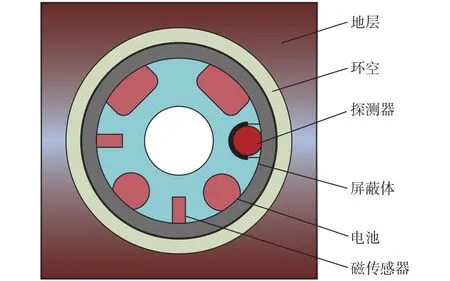
圖3 鉆鋌內伽馬探測器和磁傳感器的布局Fig.3 Layout of gamma detectors and magnetic sensors in a drill collar
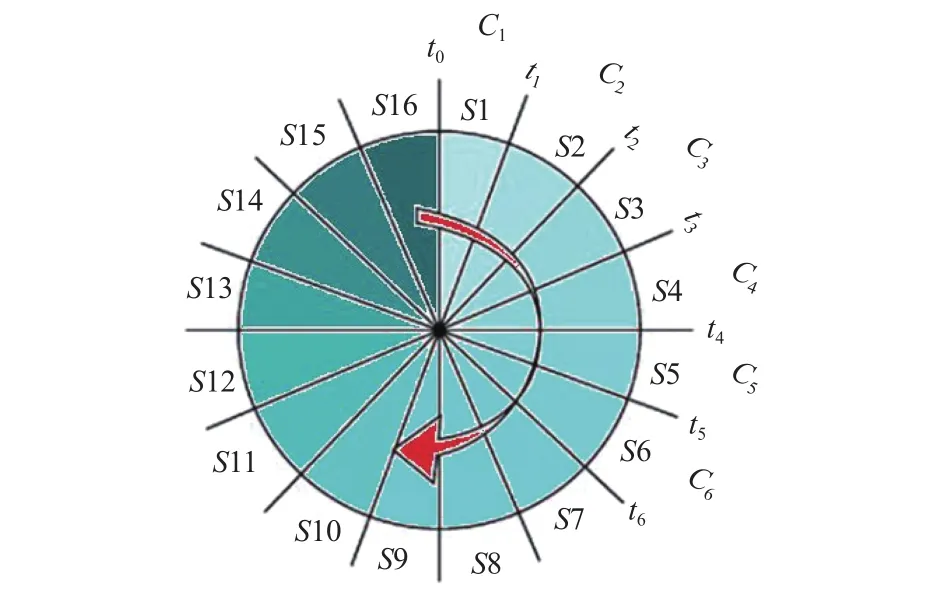
圖4 扇區、時間、伽馬計數示意Fig.4 Schematic illustration of sectors, time, and gamma counting
2.2 動態井斜角計算方法
近鉆頭地質導向的關鍵是如何在鉆具旋轉、不規則振動和強沖擊的環境下提取重力加速度信號,進而實現近鉆頭動態井斜角的精確測量;同時,還需要根據溫度對傳感器的影響進行溫漂補償。近鉆頭伽馬成像系統的測量短節上正交放置3個加速度傳感器 AX、 AY和 AZ,其中 AX和 AY為旋轉方向且互相垂直, AZ沿鉆柱軸向(見圖5)。根據鉆鋌旋轉、靜止和滑動等狀態,分別計算不同的井斜角 α。

圖5 動態井斜計算方法Fig.5 Calculation method of dynamic well deviation
鉆鋌不同狀態下的井斜角 α為:
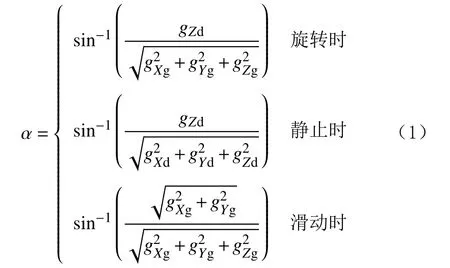
式中:gXg,gYg,gZg分別為地面測量的重力加速度,m/s2;gXd,gYd,gZd分別為井下測量的重力加速度,m/s2。
2.3 地層相對傾角計算方法
地質導向過程中,當鉆頭穿過放射性不同地層邊界時,伽馬成像圖在地層邊界處呈正弦曲線特征,利用扇區伽馬成像圖可以精確反演井眼相對傾角,確定地層邊界,控制井眼軌跡。地質導向工程人員可以根據正弦曲線的特征來估計地層相對傾角,從而指導鉆進過程。國內外的地質導向軟件大多采用人工拾取方式拾取地層邊界處的正弦曲線,不僅工作量較大,而且不同解釋人員的解釋結果存在較大差異。隨鉆伽馬成像在提取正弦曲線時采用中值擬合法進行自動提取,該方法在不同方位伽馬曲線的中值處進行插值求取其對應的深度,再將深度和相應的方位角進行正弦擬合,從而得到地層邊界處的正弦曲線。圖6所示為在相對傾角80°的地層中利用中值擬合法拾取的正弦曲線,從圖6可以看出,利用中值擬合法拾取的正弦曲線可以較準確地反映地層邊界。

圖6 中值擬合法拾取的地層邊界處正弦曲線Fig.6 Sine curves at the stratigraphic boundary obtained by median fitting method
首先利用隨鉆過程中測量得到的隨方位和深度變化的伽馬值進行成像,然后根據成像信息來估計井眼相對傾角的變化趨勢,從而調整鉆頭方向,實現地質導向鉆進。利用成像結果計算相對傾角 αr的公式為[11]:

式中:H為伽馬成像圖正弦波高度值,即伽馬成像圖中地層邊界正弦曲線的波峰與波谷的垂直距離(見圖7),m;D為井眼直徑,m;d為垂直井軸方向上觀測到的伽馬成像的地層深度,也稱伽馬成像深度, m。
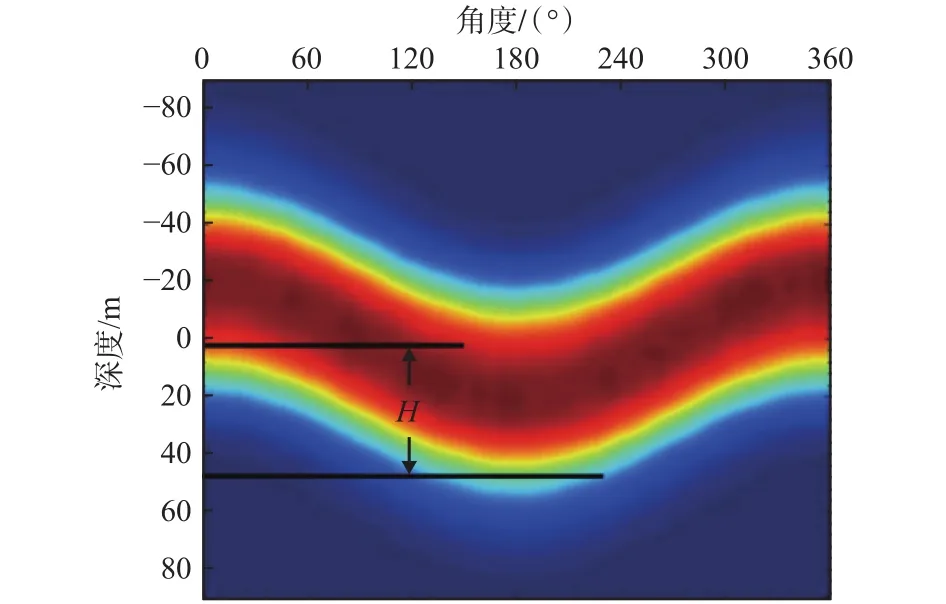
圖7 傾斜地層的隨鉆伽馬成像圖Fig.7 Gamma images while drilling for the inclined strata
H可以從伽馬成像圖中得到,但是由于H受到井眼和地層條件的影響,因而計算得到的相對傾角也會受到井眼和地層條件的影響。
2.4 跨螺桿無線傳輸
測量的近鉆頭數據需要跨過螺桿傳輸到接收短節才能通過隨鉆測量系統傳輸至地面,常用的傳輸方式有電磁波、超聲波和導線[12–14],由于超聲波和導線傳輸的儀器維護不便且費用昂貴,因此采用無線磁偶極子短傳技術。與其他傳輸方式相比,無線磁偶極子短傳技術具有可靠性高、誤碼率低等特點,尤其適用于油基鉆井液和高礦化度鉆井液。該技術建立無線電磁傳輸信道的方法是:用2個繞有線圈的磁環作為發射天線和接收天線,兩磁環分別裝在測量短節和接收短節上,測量短節上安裝的是發射天線,接收短節上安裝的是接收天線(見圖8)。

圖8 無線電磁短傳信道構成Fig.8 Structure of a short wireless electromagnetic transmission channel
無線傳輸的工作原理是:將近鉆頭測量數據進行調制,放大成頻率為f的信號電流施加到發射天線上,在信號電流的激勵下產生頻率為f的交變磁場,而這交變磁場又在接收天線上感應出電磁信號,經過多級放大、噪聲濾波、解調和信號檢波等一系列處理,最終還原出近鉆頭測量數據。電磁信號在井下傳播除與自身頻率和傳輸介質有關外,還與天線的設計形式、發射方向和功率有關。
建立無線電磁短傳信道的方法是:接收天線接收的微弱信號經接收電路放大并處理,信號傳輸處理過程中,受螺桿、地層、鉆井液及放大電路自身噪聲的影響,傳輸可靠性較差。為提高信號傳輸的可靠性,需要進行調制,并加入信道糾錯編碼技術。通信系統可以采用多種調制方式對信號進行調制,最常用的是相移鍵控調制方式,其中二進制相移鍵控(BPSK)是靈敏度最高的相移鍵控調制方式,同時BPSK調制信號在接收端的調制處理也更簡單[15]。BPSK信號的時域表達式為:

式中:g(t)是單個矩形脈沖;Ts為脈寬;;ωc為載波頻率;t為時間;an為輸入基帶信號。輸入基帶信號的特征為:

可見,在一個碼元的持續時間Ts內e0(t)為:

即發送碼元1時,eBPSK(t)的相位取π;發送碼元0時,eBPSK(t)的相位取0。通過不同相位的載波來表示傳輸數據信息的調制方式,稱為絕對相移的相位鍵控方式。
3 短節結構設計及力學分析
近鉆頭伽馬短節搭載了多個功能復雜的電子電路系統,包括各種探測器、電路板和供電電池等,同時還需要承載鉆進破巖作用力,其結構設計的可靠性是實現測量、傳輸等功能的基礎和關鍵。由于短節上需要加工各種凹槽放置各種電子電路系統,導致其具有多個危險截面,本體要承受拉、壓、彎、扭等交變載荷,經分析計算短節能夠滿足抗拉、抗壓、抗彎強度要求,為了保證開槽鉆鋌在一定扭矩下具有足夠抗扭特性,需要計算鉆鋌開槽后所能夠承受的最大扭矩。鉆鋌開槽之后結構復雜,理論求解計算難以實現,因此,采用有限元法建立鉆鋌開槽后的有限元模型,對其進行靜力分析,以評估鉆鋌開槽后承受最大扭矩時的安全性。
測量短節內有內部過流通道、外部有安裝電路板、傳感器、發射天線和電池的槽,進行強度分析時,根據扣型選用最大上扣扭矩21.658 kN·m作為受力條件[16],短節承受的最大應力位于中部靠近密封圈槽處,達到2.197 MPa(見圖9)。最大應力小于鉆鋌能夠承受的應力,表明測量短節結構強度滿足要求。
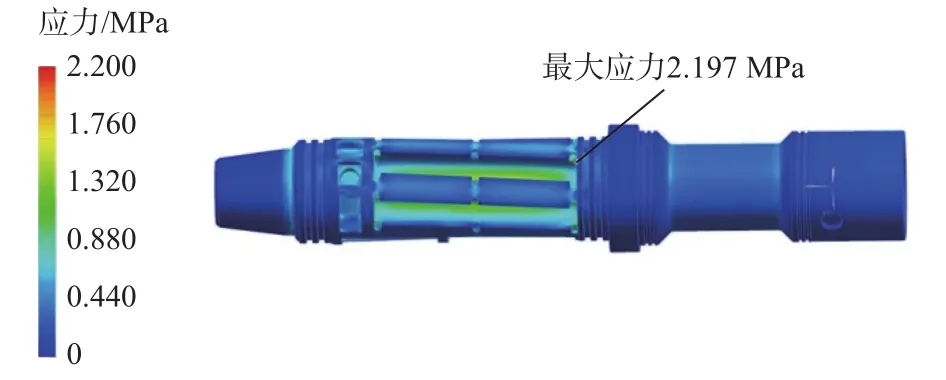
圖9 測量短節扭轉應力圖Fig.9 Torsional stress of a measuring nipple
4 地面實時成像系統
地面實時成像系統對隨鉆方位伽馬數據進行接收、解碼、預處理、實時顯示和導向應用。伽馬數據在進行了井深校正和成像預處理后,就可以用于地質構造和地層巖性的識別。方位伽馬數據通常采用成像圖方式進行展示和應用[17]。成像圖的顯示主要包括沿井眼軌跡方向顯示、沿水平方向投影顯示和沿垂向方向投影顯示等3部分(見圖10,圖中:U,D,L和R分別表示上、下、左、右方位;GRU,GRD,GRL和GRR分別為上、下、左、右伽馬曲線)。沿井眼軌跡顯示伽馬探測器在鉆進中的實際測量數據;水平投影顯示地層沿徑向延伸的變化情況,識別徑向上地質構造變化;垂直投影顯示則用來識別地層沿垂向的巖性變化。
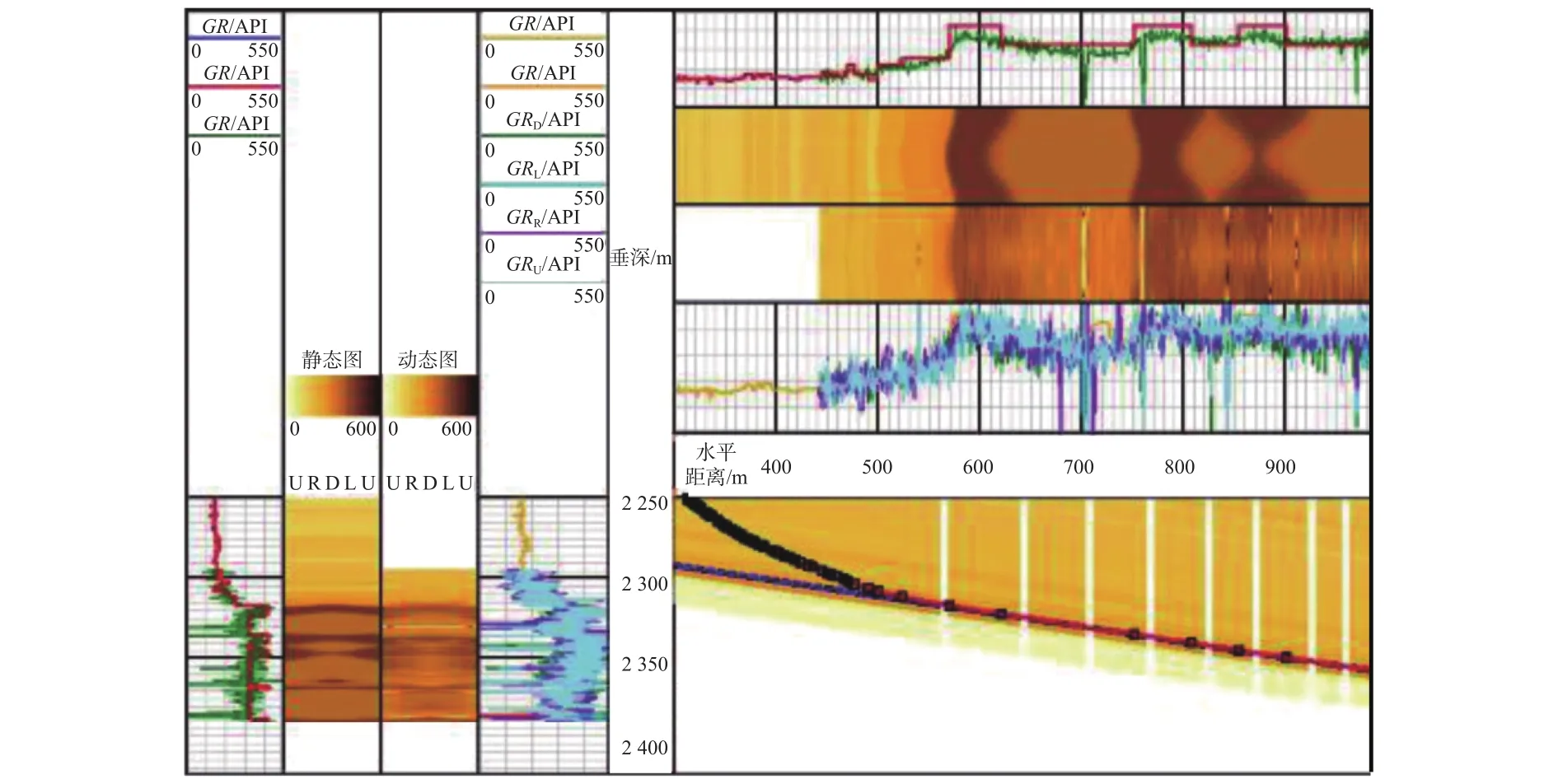
圖10 地面實時成像系統顯示界面Fig.10 Display interface of a real-time surface imaging system
地面實時成像系統還可以對井下傳輸上來的方位伽馬數據進行精細化成像處理,形成多扇區地層成像圖。井下方位伽馬數據實際上是由一系列數據線構成,地面讀取后進行濾波、插值、擬合處理,形成更加均勻光滑的成像圖。地面實時成像系統實現了隨鉆遙測系統的數據通訊、井深跟蹤、伽馬成像數據處理顯示和井眼軌跡繪制,而且方位伽馬數據帶有方位信息,可以準確判斷鉆頭在地層的位置,預測地層走向及井眼相對傾角變化趨勢。
5 現場應用
近鉆頭伽馬高精度實時成像技術已在多個油田10余口井進行了現場應用,取得了較好的現場應用效果。勝利油田臨盤油區某井設計垂深2 123.00 m,水平段長 789.00 m,A靶點儲層頂垂深 2 118.00 m、底垂深 2 128.00 m,B靶點儲層頂垂深 2 116.00 m、底垂深2 126.00 m。近鉆頭伽馬成像系統入井鉆具組合為?215.9 mm金剛石鉆頭+近鉆頭測量短節+1.25°單彎螺桿+浮閥+接收短節+常規MWD+無磁承壓鉆桿+加重鉆桿+?127.0 mm常規鉆桿。近鉆頭方位伽馬零長為0.74 m,遠端MWD方位伽馬零長為15.90 m。
二開近鉆頭伽馬成像系統入井后,累計進尺1 200.00 m,累計工作時間超過 100 h,整個二開期間伽馬測量數據穩定,地層參數變化清晰,進入A靶點后通過實時監控伽馬值的變化趨勢,及時調整井眼軌跡,保證了鉆頭在預定儲層中穿行,最終該井進行了3趟鉆施工,水平段儲層鉆遇率達到96%。根據近鉆頭伽馬實時成像圖,能夠很容易判斷鉆頭是否出儲層(見圖11),從井深 2 148.00 m 開始近鉆頭上(或頂)、下(或底)伽馬值開始升高,成像圖由亮變暗,表明開始進入高放射性泥巖層段,這與地面巖屑伽馬測量儀測量結果一致,結合地面實時成像軟件計算出相對傾角為1.2°,需要及時調整井斜角,以4.0°/30m的糾斜能力回調,需要約19.00 m重新回到儲層,儲層鉆遇率約損失2.4%;若以常規的遠端MWD方位伽馬作為測量依據,則從發現鉆頭出層到調整回儲層需要約49.00 m,儲層鉆遇率損失約6.2%。可見,采用近鉆頭伽馬成像系統能夠大幅提高儲層鉆遇率。

圖11 近鉆頭伽馬現場實時數據Fig.11 Real-time data of near-bit gamma imaging
6 結 論
1)近鉆頭伽馬成像系統采用機械電子一體化設計,將常規LWD導向時的測量盲區由10.00 m多縮短至不到1.00 m,能夠實現近鉆頭地質參數測量和數據傳輸,可提前發現儲層邊界和相對傾角并及時調整井眼軌跡,從而提高儲層鉆遇率。
2)近鉆頭伽馬成像系統解決了靠近鉆頭位置強振動、高轉速條件下的伽馬精確測量、高精度隨鉆成像、跨螺桿數據傳輸和復雜截面結構設計等難題,為地質導向鉆井系統的研發奠定了基礎。
3)近鉆頭伽馬高精度成像技術在定向井、水平井勘探開發中具有良好的應用前景,尤其在薄油層、構造不確定性較高和橫向變化大的區塊應用時優勢更加明顯,通過伽馬成像實時監控鉆頭位置,可以保證井眼軌跡在優質儲層中穿行,提高儲層鉆遇率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
