一種超高頻射頻識別技術在無人機飛行軌跡反饋中的應用研究*
2021-06-29 10:33:52司飆
數字技術與應用 2021年5期
司飆
(滇西科技師范學院智能與信息工程學院,云南臨滄 677000)
1 需求分析
1.1 系統需求
本系統的主要功能是在無人機高空作業時,架設多個軌跡反饋采樣點,無人機通過軌跡點的同時能實時記錄飛行軌跡和用時,并反饋給控制中心,使飛手實時接收無人機飛行軌跡,達到精準化計時、透明化跟蹤、智能化高空作業的目的。
1.2 工作人員需求
在飛手進行高空作業控制時,能實時獲取到無人機的飛行軌跡和準確的到達軌跡采集點時間,從而進行優化飛行作業。
2 系統總體功能架構
本系統有三個模塊組成:軌跡采集子系統、控制中心、Web服務平臺。
3 詳細設計
系統設計邏輯圖,如圖1所示。
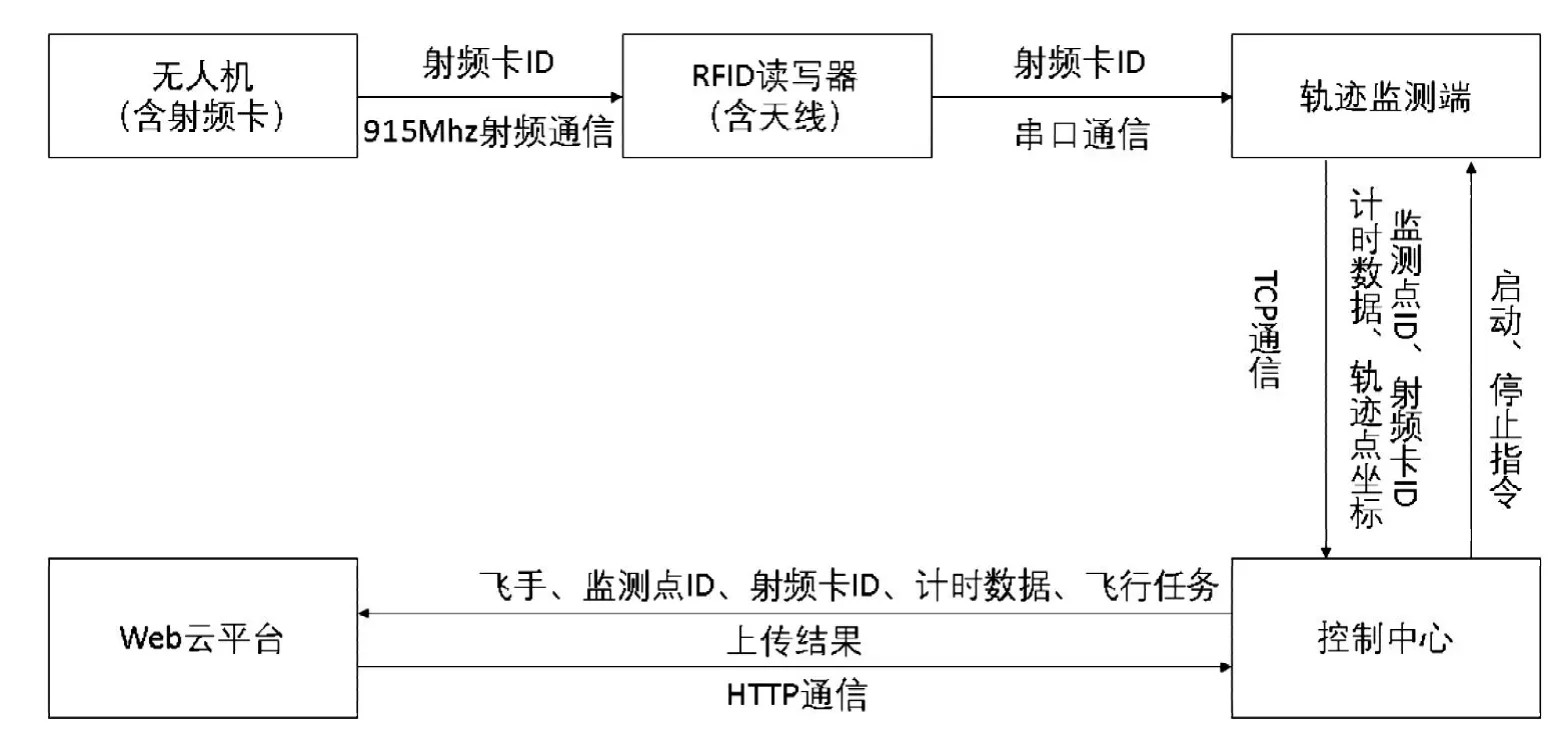
圖1 系統邏輯圖Fig.1 System logic diagram
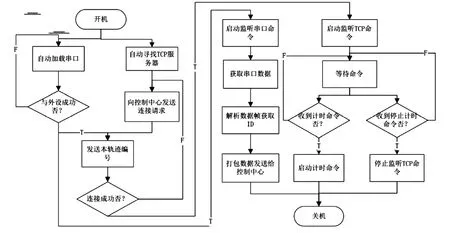
3.1 軌跡采集子系統設計
軌跡采集子系統業務流程,見圖2。
3.2 控制中心設計
3.2.1 控制中心功能
控制中心的主要架構有兩個,一是采用TCP服務器技術與軌跡采集子系統連接,二是采用HTTP協議與云端web服務器連接。主要功能如下:(1)實時監聽和控制軌跡采集子系統(包括向軌跡采集子系統發送啟動計時命令、實時接收軌跡點回傳數據、向數據中心服務器上傳飛行數據等);(2)信息的統計,無人機高空作業軌跡和用時以軌跡地圖和界面形式顯示。向數據中心服務器上傳回傳的飛行數據。
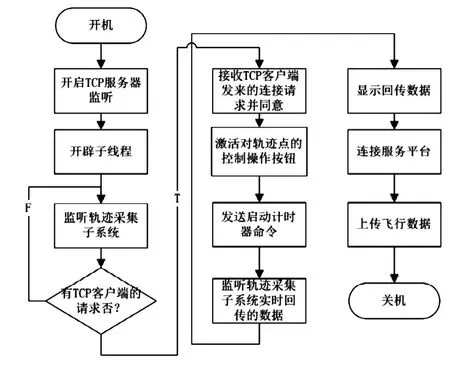
3.2.2 控制中心業務流程(見圖3)
3.3 關鍵算法
3.3.1 ISO18000-6協議格式分析
目前奶牛養殖產業不斷向前發展,奶牛乳腺炎的發病率呈現升高趨勢,由于該種疾病診斷難度較大,當奶牛出現泌乳量下降后,很多養殖戶并沒有引起重視,最終造成嚴重經濟損失。導致奶牛出現隱性乳腺炎的主要原因是乳房受到物理、化學、微生物等刺激出現的一系列炎癥變化。奶牛出現以上乳腺炎后,乳汁中T細胞數量會顯著升高,特別是白細胞增多,乳腺組織出現病理學變化。在日常養殖中由于擠奶方式不科學,存在粗暴對待現象,擠奶機負壓過大,負壓不穩定等,導致奶牛隱性乳腺癌的發病率呈現升高趨勢。人工擠奶時由于操作者技術不熟練,乳汁擠不徹底,擠乳方式不合理均衡等,易誘發隱性乳腺炎的發生。
ISO18000-6 協議適用于860MHz-960MHz 頻段的工業,基于“一問一答”實現讀寫器到射頻卡端的通信。
3.3.2 RSSi接收的信號強度
RSSi是依據接收信號能量強度,用來測定信號點與接收點的距離,進而根據相應數據進行定位計算的一種定位技術。上面的例子中RSSI為210,單位是dBm(分貝毫瓦,為一個指代功率的絕對值)。
4 安裝及使用
4.1 系統需求
運行需求:win7及以上操作系統,.NETFramework4。
4.2 搭建web服務器
本系統的web服務使用華為云平臺來實現。服務器框架采用的ApacheXXX 服務器,數據庫采用mySql。
華為云安裝了一個CentOS,在CentOS使用SSH連接工具連接Centos安裝服務器運維管理面板【寶塔】。安裝腳本yum install -y wget &&wget -O install.sh http://download.bt.cn/install/install_6.0.sh &&sh install.sh ed099927在運維管理面板【寶塔】中添加站點,綁定在【西部數碼】解析的域名,可提供服務的端口有:[80][888][39000-40000][20][22][21][8989]。
4.3 配置數據采集端
(1)安裝 USB 串口驅動;(2)安裝超高頻天線。
4.4 配置監測控制端
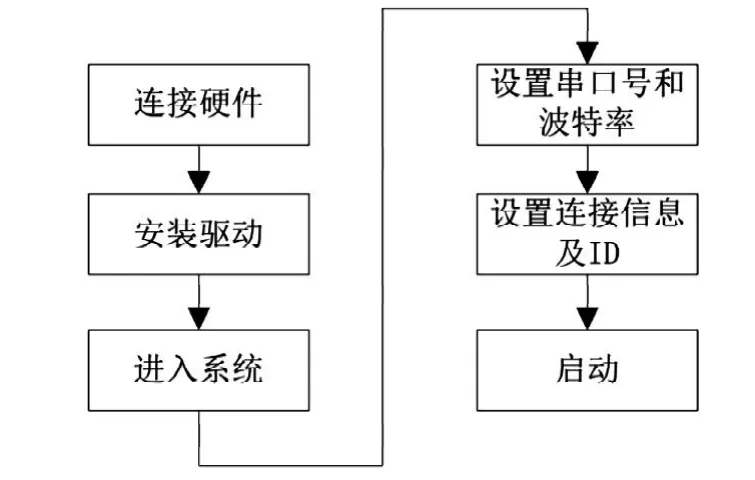
綁定主機ID和端口號,啟動監聽。
4.5 系統使用操作
數據采集端,如圖4 所示。
5 結論
該系統是使用C#語言開發,利用射頻識別技術、串口操作的相關知識設計出的基于RFID的無人機飛行軌跡反饋系統,本系統賦予無人機“開口說話”的能力,實時反饋飛行軌跡。主要工作流程是管理員進入控制中心,向軌跡采集端下發命令,獲取無人機信息,并上傳到服務器共享,操作人員可隨時掌握無人機的準確位置及其周邊環境,并且有效起到了監督和輔助GPS定位的作用,大大提升了工作效率。
與傳統無人機飛行系統相比,本系統優點在于可靠性強,能實時的采集和反饋;系統的實施不依賴于無人機本體,獨立性強;RFID標簽質量輕,便于粘貼到機身表面而不給無人機增加負擔;系統部署實施靈活等。
6 應用前景
現在無人機的應用越來越廣泛,但是許多問題也相繼浮現出來。高空作業的環境通常都很惡劣且地形比較復雜,還會存在一些不可控的干擾因素如風速、溫度等影響無人機作業,其中最為嚴重的就是GPS信號受磁場干擾,影響GPS精確定位;以及到了一定的距離,無人機接受信號的能力就會變弱,導致無人機沒有按時達到預定地點或者圖傳失效,甚至會失控或者炸機,從而造成不可挽回的損失。而我們的RFID系統則起監督和輔助的作用,確保無人機在受到其他磁場干擾時仍然能夠做到精確定位。
6.1 信號干擾
對無人機的控制多使用無線電通信技術,通過向目標無人機發射大功率干擾信號,對控制信號進行壓制,就可以迫使無人機自行降落或返航。
6.2 GPS欺騙
GPS 欺騙的主要原理就是向無人機的控制系統發送虛假的地理位置坐標,從而控制導航系統,誘導無人機飛向錯誤的地點。GPS信號可以由發生器來產生,也可以是事先錄制然后重放。由于無人機接收GPS信號總是以信號最強的信號源為準,因此在地面人造的GPS信號只要強度足夠大,就可以覆蓋真正的從太空中傳來的GPS信號,從而欺騙無人機的GPS 接收模塊。
6.3 信號接收機自身存在問題
接收系統指發射機發射的信號經過接收天線,濾波,放大,混頻成中頻信號,然后進入調制解調器解讀出來。這個系統里除了濾波器是個頻率選擇性器件,其他的都張開懷抱迎接八方來賓,最少迎接附近的來賓,或者倍頻處的來賓,而且是不受限制的進來。濾波器作為一個頻率選擇性器件,對附近的電磁波進行過濾,但由于濾波器自身的特性,也不能把頻帶外的電磁波完完全全的消除掉,所以還是有部分很弱的干擾信號進來的。
另外,接收機不能達到理想狀態,對接收頻帶外的信號也會發生響應。
6.4 無線電劫持
現在,無人機使用的控制信號大多在1.2GHz、2.4GHz、5.8GHz等常規民用頻段,隨著Arduino和樹莓派等開源硬件的快速發展和軟件無線電(SDR)技術的流行,普通愛好者也可以利用從網絡買到的硬件和從論壇獲得的軟件源碼模擬遙控器向無人機發送控制信號,并覆蓋真正遙控器的信號,從而獲得無人機的控制權。
7 總結
本系統使用RFID 通訊技術,可通過無線電信號識別特定目標,無線電的信號是通過調成無線電頻率的電磁場,把數據從附著在無人機上的超高頻標簽上傳送出去,以自動辨識與追蹤無人機,糾正航線。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25