基于深度預(yù)測(cè)的單目SLAM絕對(duì)尺度估計(jì)
2021-06-28 12:42:34張建博唐鼎新
計(jì)算機(jī)工程與設(shè)計(jì) 2021年6期
張建博,袁 亮,何 麗,冉 騰,唐鼎新
(新疆大學(xué) 機(jī)械工程學(xué)院,新疆 烏魯木齊 830047)
0 引 言
由于單目相機(jī)具有成本低、適用范圍廣和校準(zhǔn)過(guò)程簡(jiǎn)單等優(yōu)勢(shì),使得單目視覺(jué)同時(shí)定位與地圖構(gòu)建(simulta-neous localization and mapping,SLAM)成為機(jī)器人在未知環(huán)境中自主定位的一個(gè)重要研究方向。但是單目存在尺度不確定性的缺點(diǎn),無(wú)法通過(guò)單幀圖像得到場(chǎng)景中真實(shí)的深度信息,使單目SLAM出現(xiàn)尺度模糊的問(wèn)題,因此需要一種單目的絕對(duì)尺度估計(jì)方法來(lái)恢復(fù)單目的絕對(duì)尺度。Ji Zhang等[1]使用激光雷達(dá)來(lái)輔助單目恢復(fù)場(chǎng)景的真實(shí)尺度;文獻(xiàn)[2-4]利用慣性測(cè)量單元(inertial measurement unit,IMU)輔助單目恢復(fù)絕對(duì)尺度;Shiyu Song等[5]提出利用物體先驗(yàn)尺寸來(lái)恢復(fù)單目尺度;文獻(xiàn)[6]利用相機(jī)的先驗(yàn)高度信息獲得單目絕對(duì)尺度;Sen Wang等提出的DeepVO[7]和陳宗海等提出的LSTMVO[8]是一種端到端的深度學(xué)習(xí)框架,通過(guò)輸入離線的視頻序列可以同時(shí)輸出深度圖和相機(jī)位姿。
此外,實(shí)現(xiàn)精確的自主定位是SLAM最重要的任務(wù)之一,而單目SLAM的尺度不確定性會(huì)引起尺度漂移的問(wèn)題,從而嚴(yán)重影響了定位精度。Engel J等提出基于直接法的DSO[9]利用光束法平差(bundle adjustment,BA)減少尺度漂移。Mur-Artal等提出基于特征點(diǎn)的ORB-SLAM[10],利用局部BA和全局回環(huán)檢測(cè)方法減少尺度漂移。
本文利用MonoDepth[11]深度預(yù)測(cè)網(wǎng)絡(luò)估計(jì)單目的絕對(duì)尺度,以此來(lái)彌補(bǔ)單目固有的尺度模糊的缺點(diǎn)。利用絕對(duì)尺度實(shí)時(shí)校正尺度漂移,從而提高單目SLAM的定位精度。
1 單目視覺(jué)SLAM
單目視覺(jué)SLAM中一般采用針孔相機(jī)模型,其成像原理如圖1所示,空間中一點(diǎn)投影在2維相機(jī)成像平面上,得到一個(gè)2維像素點(diǎn)P,但僅通過(guò)成像平面上的一個(gè)像素點(diǎn)P無(wú)法確定出該空間點(diǎn)的具體位置,因?yàn)閺南鄼C(jī)光心過(guò)歸一化平面整條射線上的所有點(diǎn)都可以投影到該像素點(diǎn),所以當(dāng)確定了點(diǎn)P的真實(shí)深度時(shí)才能得到它的空間位置。
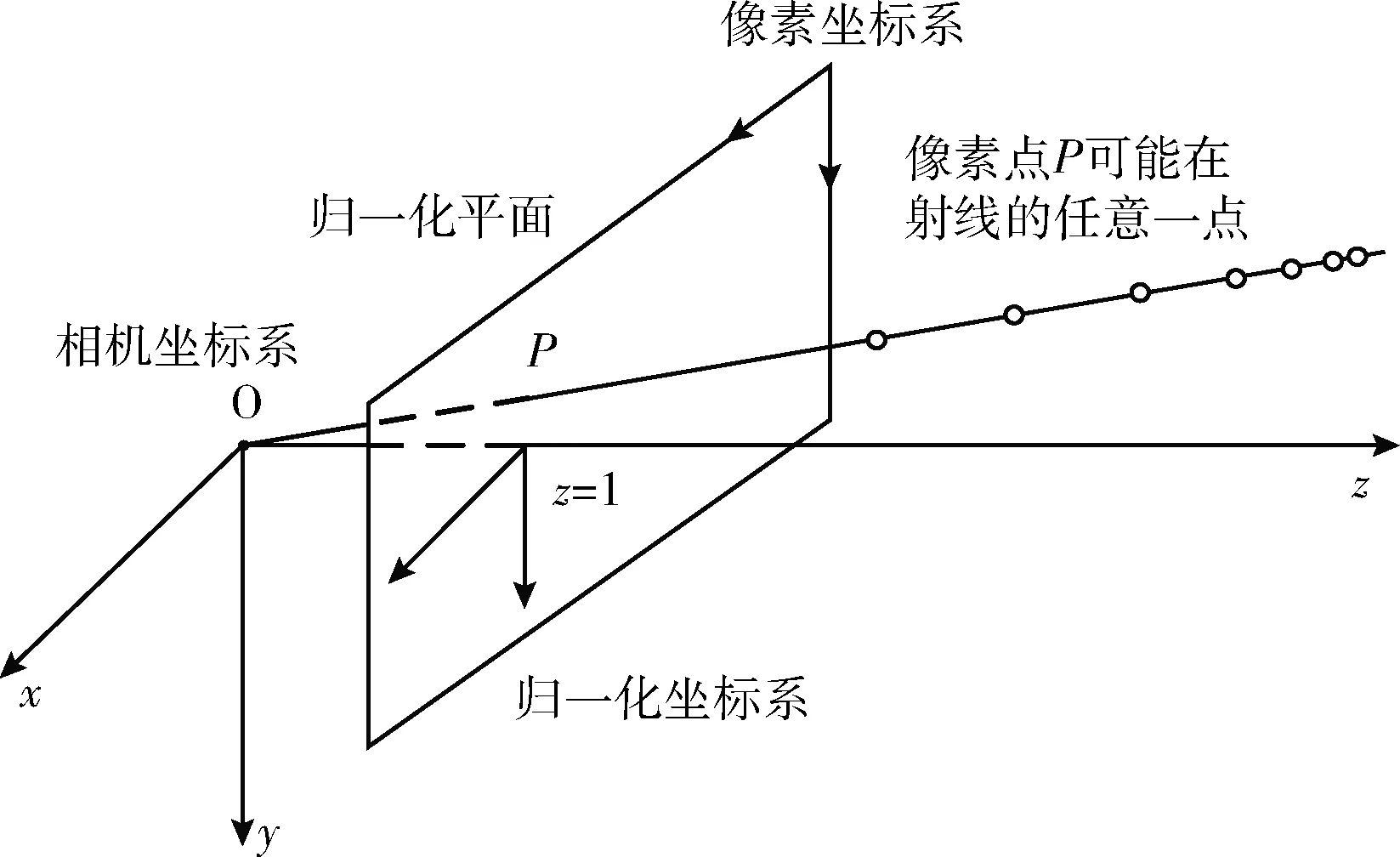
圖1 單目尺度不確定性原理
傳統(tǒng)單目視覺(jué)SLAM是通過(guò)三角化過(guò)程來(lái)恢復(fù)像素點(diǎn)相對(duì)深度的。首先對(duì)連續(xù)兩幀二維圖像提取特征點(diǎn),再根據(jù)圖像特征進(jìn)行特征點(diǎn)匹配,最后利用對(duì)級(jí)約束關(guān)系恢復(fù)出兩幀圖像之間相機(jī)的運(yùn)動(dòng),求解原理如圖2所示,單目相機(jī)獲取的相鄰幀圖像序列I1,I2經(jīng)過(guò)特征提取和匹配,得到匹配好的其中一對(duì)特征點(diǎn)p1,p2,分別對(duì)應(yīng)空間中一點(diǎn)P=[X,Y,Z]T在I1,I2上的投影,在針孔相機(jī)模型中有以下空間幾何關(guān)系
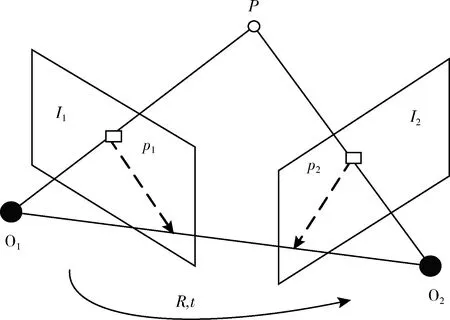
圖2 單目相機(jī)運(yùn)動(dòng)求解原理
s1p1=KP,s2p2=K(RP+t)
(1)
式中:K為單目相機(jī)的內(nèi)參矩陣,R、t為兩幀圖像的相機(jī)位姿變換,s1、s2為尺度變換因子。
齊次坐標(biāo)下,取x1、x2為兩個(gè)像素點(diǎn)p1、p2在歸一化坐標(biāo)平面上的點(diǎn),則有
x1=K-1p1,x2=K-1p2
(2)
(3)

(4)
對(duì)極約束中包括了旋轉(zhuǎn)和平移,其中
(5)
求解相對(duì)位姿變化R、t需要求解本質(zhì)矩陣E。
由于對(duì)級(jí)約束是等式為0的約束,使得E具有尺度等價(jià)性,由E分解得到的R、t也具有尺度等價(jià)性。對(duì)匹配點(diǎn)的歸一化坐標(biāo)x1=[u1,v1,1]、x2=[u2,v2,1],其對(duì)級(jí)約束關(guān)系為
(6)
中間項(xiàng)e1到e9組成本質(zhì)矩陣E,對(duì)E進(jìn)行SVD奇異值分解,恢復(fù)出相機(jī)的運(yùn)動(dòng)R、t,即得到了兩幀圖像I1、I2之間的位姿坐標(biāo)變化T
(7)
對(duì)同一空間點(diǎn)P,求解方程如下
s1x1=s2Rx2+t
(8)
s2R2x2+t=0
(9)
解得s1即可得到p1點(diǎn)相對(duì)深度z,最終得到相機(jī)坐標(biāo)系下估計(jì)的空間點(diǎn)P的相對(duì)坐標(biāo)P=(x,y,z)T,但由于無(wú)法確定求解的平移量t與對(duì)應(yīng)世界坐標(biāo)系下的實(shí)際移動(dòng)距離的比例,也即t與實(shí)際位移相差一個(gè)比例因子。由于尺度模糊,相機(jī)位姿估計(jì)缺乏絕對(duì)尺度的校正,以及相機(jī)的觀測(cè)噪聲和特征點(diǎn)的誤匹配等其它因素的影響,最終會(huì)導(dǎo)致更嚴(yán)重的尺度漂移問(wèn)題,給相機(jī)位姿估計(jì)帶來(lái)隨時(shí)間逐步增大的累積誤差,并最終使處于未知環(huán)境中的機(jī)器人定位精度嚴(yán)重下降。
2 基于深度預(yù)測(cè)的絕對(duì)尺度估計(jì)
針對(duì)上述的問(wèn)題,本文研究了單目SLAM的位姿估計(jì)過(guò)程,提出利用MonoDepth深度預(yù)測(cè)網(wǎng)絡(luò)獲取單目圖像的絕對(duì)深度信息,來(lái)估計(jì)單目SLAM的絕對(duì)尺度,并通過(guò)特征點(diǎn)選取算法篩選含有可靠深度值的ORB特征點(diǎn),最終用真實(shí)深度值進(jìn)行相機(jī)的位姿估計(jì)與優(yōu)化。
2.1 深度預(yù)測(cè)
本文采用深度預(yù)測(cè)網(wǎng)絡(luò)MonoDepth進(jìn)行單目圖像的深度估計(jì)。MonoDepth是一個(gè)端到端的單目無(wú)監(jiān)督深度估計(jì)網(wǎng)絡(luò),網(wǎng)絡(luò)是全卷積架構(gòu),主要包括兩部分:編碼器和解碼器。MonoDepth深度預(yù)測(cè)網(wǎng)絡(luò)不需要深度圖的真值來(lái)訓(xùn)練,而是以雙目圖像的左圖作為輸入,經(jīng)過(guò)卷積神經(jīng)網(wǎng)絡(luò),生成左圖的預(yù)測(cè)視差圖,并加入僅在訓(xùn)練中使用的雙目攝像機(jī)的右圖,用左右視圖一致性損失函數(shù)來(lái)增強(qiáng)左右視差圖的一致性,從而使結(jié)果更準(zhǔn)確,最終得到左圖的深度預(yù)測(cè)圖。MonoDepth網(wǎng)絡(luò)總的損失函數(shù)如下
(10)
式中:上下標(biāo)l和r分別表示深度預(yù)測(cè)網(wǎng)絡(luò)訓(xùn)練時(shí)所用的雙目相機(jī)的左圖和右圖,α為各部分權(quán)重,C表示總的損失函數(shù),它包括3部分:外觀匹配損失Cap、視差平滑損失Cds和左右視差一致性損失Clr。
經(jīng)過(guò)深度預(yù)測(cè)網(wǎng)絡(luò)得到圖像中各像素的雙目視差值。根據(jù)實(shí)際需求,本文調(diào)整了MonoDepth網(wǎng)絡(luò)的輸入和輸出部分,在輸入部分將網(wǎng)絡(luò)調(diào)整為可以適應(yīng)KITTI數(shù)據(jù)集的輸入圖片大小,而不受原始網(wǎng)絡(luò)本身只能輸入固定尺寸的限制,并通過(guò)批量預(yù)測(cè)以提高效率;而在網(wǎng)絡(luò)的輸出部分,原始網(wǎng)絡(luò)輸出為雙目視差圖,而為得到可以直接用于位姿估計(jì)的真實(shí)深度值,我們?cè)诰W(wǎng)絡(luò)的后處理階段通過(guò)如下公式計(jì)算得到對(duì)應(yīng)像素的真實(shí)深度值
(11)
式中:d表示預(yù)測(cè)的深度值,disp表示網(wǎng)絡(luò)預(yù)測(cè)的視差值。網(wǎng)絡(luò)的訓(xùn)練需要通過(guò)雙目相機(jī)獲取的雙目圖像,b表示雙目相機(jī)的基線長(zhǎng)度。f表示雙目相機(jī)的焦距。
2.2 特征點(diǎn)選取
利用MonoDepth深度預(yù)測(cè)網(wǎng)絡(luò)獲得的深度值來(lái)恢復(fù)二維圖像中特征點(diǎn)的真實(shí)三維坐標(biāo),但并不是所有深度值都會(huì)用作估計(jì)。由于只有距離較近的點(diǎn)對(duì)位姿估計(jì)起較大作用,而距離較遠(yuǎn)的特征點(diǎn)在相鄰幀中位置變化非常小,如在室外場(chǎng)景下,天空與前方樹(shù)木交界處或道路盡頭等距離遠(yuǎn)但像素梯度變化大的地方檢測(cè)到的特征點(diǎn)。在SLAM中很難利用這些特征點(diǎn)進(jìn)行相機(jī)的位姿估計(jì),但這些特征點(diǎn)仍進(jìn)行了大量重復(fù)的計(jì)算,這不但占用了較多的計(jì)算資源,還會(huì)帶來(lái)更大的噪聲和誤差,故需要剔除距離較遠(yuǎn)的特征點(diǎn)。
本文采用的策略是判斷深度值是否為可靠深度,將從圖像中提取的ORB特征點(diǎn)分為近點(diǎn)和遠(yuǎn)點(diǎn),實(shí)驗(yàn)中,設(shè)置近點(diǎn)深度閾值為20 m,將超出閾值的深度作為不可靠深度,然后剔除與不可靠深度值關(guān)聯(lián)的特征點(diǎn),僅保留近點(diǎn)的特征點(diǎn)用于進(jìn)行后續(xù)的特征點(diǎn)匹配以及相機(jī)位姿估計(jì),此處描述的特征點(diǎn)選取算法的偽代碼可以表示為如算法1所示:
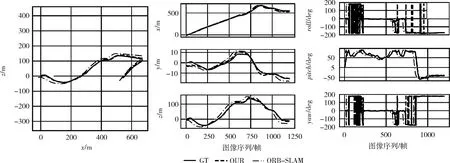
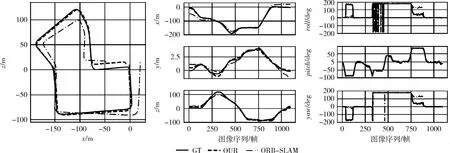
算法1: 特征點(diǎn)選取算法 輸入: 單目圖像I 設(shè)定深度閾值th. 輸出: 經(jīng)過(guò)篩選可以用于位姿估計(jì)的ORB特征點(diǎn) (1)對(duì)單目圖像提取所有特征點(diǎn)KPS (2) I經(jīng)過(guò)MonoDepth網(wǎng)絡(luò)預(yù)測(cè)各像素點(diǎn)視差值disp (3) for 第i個(gè)ORB特征點(diǎn): (4) 根據(jù)式(11)計(jì)算第i個(gè)特征點(diǎn)對(duì)應(yīng)深度值di (5) if (th 由于對(duì)每一幀圖像都進(jìn)行了深度估計(jì),每個(gè)像素點(diǎn)都具有真實(shí)的尺度信息,故在初始化階段,不用像傳統(tǒng)單目SLAM算法通過(guò)三角化過(guò)程才能得到缺乏絕對(duì)尺度的相對(duì)位姿,而是從初始幀即可獲得空間中點(diǎn)的真實(shí)3維位置信息。 首先提取圖像中ORB特征點(diǎn),ORB特征點(diǎn)包含了Oriented FAST關(guān)鍵點(diǎn)和BRIEF描述子,具有檢測(cè)速度快、魯棒性好的優(yōu)點(diǎn)。由于我們?cè)诔跏紟纯色@得真實(shí)深度,故通過(guò)2.1節(jié)獲得的真實(shí)深度信息以及ORB特征點(diǎn)的像素位置索引,對(duì)ORB特征點(diǎn)進(jìn)行絕對(duì)深度值的數(shù)據(jù)關(guān)聯(lián),即可以直接獲得空間點(diǎn)P的真實(shí)深度d,根據(jù)給定ORB特征點(diǎn)的像素坐標(biāo)(u,v)和得到的真實(shí)深度估計(jì)值d,計(jì)算該像素點(diǎn)在相機(jī)坐標(biāo)系上的世界坐標(biāo)(X,Y,Z) (12) 式中:fx、fy是相機(jī)的焦距,cx、cy是圖像原點(diǎn)相對(duì)于光心成像點(diǎn)的偏移量。 通過(guò)上述計(jì)算便得到了初始幀圖像中特征點(diǎn)的真實(shí)尺度信息,然后在提取初始幀中ORB特征點(diǎn)的過(guò)程中,通過(guò)執(zhí)行特征點(diǎn)選取算法,剔除與不可靠深度值進(jìn)行數(shù)據(jù)關(guān)聯(lián)的ORB特征點(diǎn),最后利用保留的特征點(diǎn)進(jìn)行特征點(diǎn)匹配和相機(jī)位姿估計(jì)。 根據(jù)真實(shí)深度值估計(jì)出初始幀中特征點(diǎn)的絕對(duì)尺度,繼續(xù)對(duì)第二幀圖像同樣進(jìn)行ORB特征點(diǎn)的提取,然后通過(guò)特征點(diǎn)選取算法剔除含有不可靠深度值的特征點(diǎn),將保留的含有可靠深度值的ORB特征點(diǎn)與第一幀圖像上的特征點(diǎn)進(jìn)行特征點(diǎn)匹配,傳統(tǒng)的暴力匹配算法計(jì)算效率低,本文采用計(jì)算速度快、而且更加適合大量特征點(diǎn)匹配的FLANN算法進(jìn)行特征點(diǎn)匹配。 當(dāng)特征點(diǎn)匹配成功后,我們根據(jù)得到的3D-2D特征點(diǎn)對(duì)(其中3D點(diǎn)是指第一幀相機(jī)坐標(biāo)系下已知3D位置的空間點(diǎn),而2D點(diǎn)是指第二幀圖像中與第一幀圖像特征點(diǎn)匹配的2D像素點(diǎn)),利用EPNP算法計(jì)算同一空間點(diǎn)P在第二幀相機(jī)坐標(biāo)系下的3D空間點(diǎn)位置,這樣便獲得了連續(xù)兩幀圖像各相機(jī)坐標(biāo)系下同一空間點(diǎn)的3D位置,最后根據(jù)ICP算法對(duì)連續(xù)幀間相機(jī)的位姿T進(jìn)行估計(jì)。 由于觀測(cè)點(diǎn)噪聲的存在,空間點(diǎn)P在第二幀相機(jī)坐標(biāo)系下的2D投影點(diǎn)與通過(guò)特征點(diǎn)匹配獲得的p2存在誤差(也稱為重投影誤差),解決辦法是繼續(xù)構(gòu)建非線性最小二乘BA公式,同時(shí)優(yōu)化相機(jī)位姿和空間點(diǎn)位置,使得系統(tǒng)整體的重投影誤差最小,以此來(lái)進(jìn)一步降低相機(jī)位姿估計(jì)的誤差,SLAM系統(tǒng)中非線性最小二乘的BA公式如下 (13) 同理,后續(xù)的相機(jī)位姿同樣根據(jù)已知絕對(duì)尺度的3D-2D點(diǎn)對(duì)進(jìn)行求解,用式(13)來(lái)優(yōu)化相機(jī)位姿和空間點(diǎn)位置,并通過(guò)真實(shí)的深度值實(shí)時(shí)校正尺度漂移。 本文算法流程如圖3所示。 圖3 本文算法流程 為評(píng)估本文所提出的方法,在室外公共數(shù)據(jù)集KITTI上進(jìn)行了實(shí)驗(yàn)。實(shí)驗(yàn)主要分為3部分,第一部分為SLAM定位精度對(duì)比實(shí)驗(yàn),與當(dāng)前最主流的兩種單目SLAM算法進(jìn)行了定量的對(duì)比:基于特征點(diǎn)的單目ORB-SLAM(關(guān)閉回環(huán)檢測(cè))算法和基于直接法的DSO算法;在第二部分,為更好地驗(yàn)證基于深度預(yù)測(cè)網(wǎng)絡(luò)的SLAM絕對(duì)尺度估計(jì)方法用于機(jī)器人位姿估計(jì)的性能,本文還與同樣基于深度學(xué)習(xí)的視覺(jué)里程計(jì)方法在定位精度方面進(jìn)行了對(duì)比;最后,為更直觀表現(xiàn)算法構(gòu)建全局軌跡的準(zhǔn)確性,在實(shí)驗(yàn)的第三部分定性對(duì)比了本文算法與ORB-SLAM算法得到的全局軌跡結(jié)果。 本文算法運(yùn)行的硬件配置為Intel Core i5-4460M CPU,主頻為3.2 GHz,內(nèi)存為8 G,GTX1030顯卡電腦。實(shí)驗(yàn)系統(tǒng)采用Ubuntu16.04操作系統(tǒng)。 為定量對(duì)比在沒(méi)有回環(huán)檢測(cè)功能的情況下各算法的定位精度,在實(shí)驗(yàn)中關(guān)閉了ORB-SLAM回環(huán)檢測(cè),DSO算法本身不具備回環(huán)檢測(cè)功能,本文也只用絕對(duì)深度信息來(lái)估計(jì)相機(jī)位姿。 表1展示了在KITTI數(shù)據(jù)集上3種算法的均方根誤差(root mean squared error,RMSE),每組數(shù)據(jù)都進(jìn)行了5次實(shí)驗(yàn)并取其平均值,測(cè)試圖像來(lái)自于KITTI數(shù)據(jù)集中0號(hào)相機(jī)的灰度圖。 表1 KITTI數(shù)據(jù)集上的均方根誤差(RMSE) 在實(shí)際情況下,機(jī)器人經(jīng)常處于沒(méi)有回環(huán)路徑的未知場(chǎng)景中,想要獲得準(zhǔn)確的全局定位,只能依靠穩(wěn)定精確的位姿增量估計(jì),從而使機(jī)器人在陌生環(huán)境中更好確定自身位置信息。為驗(yàn)證算法在所有場(chǎng)景下的定位精度,實(shí)驗(yàn)中關(guān)閉了ORB-SLAM算法的回環(huán)檢測(cè)功能。 本文算法通過(guò)加入場(chǎng)景的絕對(duì)尺度減少單目SLAM的尺度漂移,而不依賴回環(huán)檢測(cè)來(lái)校正相機(jī)全局位姿。從表1中可以看出,KITTI數(shù)據(jù)集的07序列場(chǎng)景下,本文的定位精度相比于單目ORB-SLAM提高了64.23%,而KITTI-07序列在起點(diǎn)處有一個(gè)回環(huán)路徑。同樣具有多處回環(huán)的00、05和06序列,也分別提高了34.20%、65.49%和63.56%。除了在有回環(huán)的場(chǎng)景下定位精度提高外,在09序列和10序列兩個(gè)無(wú)回環(huán)但長(zhǎng)距離的場(chǎng)景下,相對(duì)于DSO算法在定位精度上也分別提高了21.62%和75.10%,而對(duì)比ORB-SLAM算法分別提高了11.38%和67.36%。這驗(yàn)證了本文算法在無(wú)論有、無(wú)回環(huán)的場(chǎng)景下,都能夠表現(xiàn)出較高的定位精度和較強(qiáng)的魯棒性。 由于01序列較為空曠的場(chǎng)景和較大的光強(qiáng)變化,3種算法均無(wú)法完成測(cè)試。而在較短直線路段的03、04序列,本文算法相比于DSO算法定位精度較高,但相對(duì)ORB-SLAM定位精度略有所下降。主要原因是本文算法將場(chǎng)景中被列為遠(yuǎn)點(diǎn)的ORB特征點(diǎn)剔除,而近處的路面特征點(diǎn)較少,從而產(chǎn)生了誤差。 為了更好地體現(xiàn)算法定位精度的性能,本文還使用KITTI官方評(píng)價(jià)指標(biāo)對(duì)同樣基于深度學(xué)習(xí)的DeepVO算法和LSTMVO算法進(jìn)行了對(duì)比,其中平移均方根誤差trel以“%”來(lái)度量,旋轉(zhuǎn)均方根誤差rrel以“°/100 m”來(lái)度量。兩種算法的數(shù)據(jù)來(lái)源于對(duì)應(yīng)論文,文中只提供了KITTI數(shù)據(jù)集的部分序列上的結(jié)果,而本文算法分別在KITTI數(shù)據(jù)集00-10所有序列上進(jìn)行了測(cè)試,每組結(jié)果取5次實(shí)驗(yàn)的平均值。 如表2所示,對(duì)3種算法進(jìn)行了定量評(píng)估,加粗?jǐn)?shù)據(jù)表示更優(yōu)的結(jié)果。DeepVO算法和LSTMVO算法屬于視覺(jué)里程計(jì)范疇,并采用訓(xùn)練好的端到端的神經(jīng)網(wǎng)絡(luò)來(lái)估計(jì)相機(jī)位姿,而本文算法是通過(guò)幾何以及優(yōu)化的方式來(lái)估計(jì)位姿,從表中可以看出,在定位精度上相對(duì)另外兩種算法的均值分別提高了50.77%、59.72%和29.87%、81.37%。在KITTI數(shù)據(jù)集00-10所有序列上,僅有04序列上DeepVO算法在平移均方根誤差方面比本文高31.40%,其它結(jié)果均低于本文算法得到的結(jié)果。這也驗(yàn)證了相比于純使用訓(xùn)練端到端的神經(jīng)網(wǎng)絡(luò)來(lái)預(yù)測(cè)相機(jī)位姿的方法,通過(guò)深度預(yù)測(cè)網(wǎng)絡(luò)估計(jì)的單目絕對(duì)尺度來(lái)輔助SLAM進(jìn)行位姿估計(jì)的定位精度更高。 表2 與深度學(xué)習(xí)算法的對(duì)比結(jié)果 為定性的評(píng)估全局軌跡結(jié)果,且由于ORB-SLAM的定位精度明顯優(yōu)于DSO,故只選擇與單目ORB-SLAM進(jìn)行了軌跡對(duì)比。實(shí)驗(yàn)分別測(cè)試了在無(wú)回環(huán)、一個(gè)回環(huán)、較多回環(huán)和多回環(huán)4種場(chǎng)景下的軌跡對(duì)比,分別對(duì)應(yīng)著KITTI數(shù)據(jù)集中的10、07、05和00這4個(gè)序列,并對(duì)平移和旋轉(zhuǎn)誤差曲線也進(jìn)行了對(duì)比。 圖4~圖7展示了本文算法和單目ORB-SLAM(無(wú)回環(huán))在KITTI數(shù)據(jù)集中10、07、05和00序列的全局軌跡誤差、平移誤差和旋轉(zhuǎn)誤差的對(duì)比曲線,其中GT表示KITTI數(shù)據(jù)集提供的標(biāo)準(zhǔn)真值數(shù)據(jù),OUR表示的是本文算法得到的結(jié)果。 圖4 序列10的軌跡、平移和旋轉(zhuǎn)誤差曲線 圖5 序列07的軌跡、平移和旋轉(zhuǎn)誤差曲線 圖6 序列05的軌跡、平移和旋轉(zhuǎn)誤差曲線 圖7 序列00的軌跡、平移和旋轉(zhuǎn)誤差曲線 由于單目ORB-SLAM存在尺度漂移問(wèn)題,嚴(yán)重依賴回環(huán)檢測(cè)校正全局位姿,但大多數(shù)真實(shí)場(chǎng)景下缺少回環(huán)路徑,當(dāng)機(jī)器人在探索沒(méi)有回環(huán)路徑的未知場(chǎng)景時(shí),機(jī)器人很難通過(guò)回環(huán)檢測(cè)來(lái)校正全局位姿,所以會(huì)隨時(shí)間產(chǎn)生累積誤差。而本文通過(guò)深度預(yù)測(cè)網(wǎng)絡(luò)為單目SLAM增加了準(zhǔn)確的絕對(duì)尺度信息,從而在增量的估計(jì)過(guò)程中減少了單目SLAM算法的累積漂移誤差,而不再需要回環(huán)檢測(cè)來(lái)校正全局位姿。從圖中可以看出,本文算法不僅在多回環(huán)場(chǎng)景下的00序列相比于單目ORB-SLAM更靠近真實(shí)軌跡,而且也可以適用于如10序列沒(méi)有回環(huán)的場(chǎng)景。這也進(jìn)一步驗(yàn)證了通過(guò)深度預(yù)測(cè)網(wǎng)絡(luò)來(lái)估計(jì)單目SLAM的絕對(duì)尺度,能夠顯著地降低累積漂移誤差,從而提高相機(jī)的定位精度。 本文提出一種通過(guò)結(jié)合深度預(yù)測(cè)網(wǎng)絡(luò)MonoDepth恢復(fù)單目絕對(duì)尺度的低成本、高定位精度的單目SLAM算法,能夠利用真實(shí)深度信息來(lái)有效解決單目SLAM的尺度漂移問(wèn)題,并通過(guò)剔除不可靠深度值的特征點(diǎn)可以消除遠(yuǎn)點(diǎn)對(duì)定位精度的影響,從而利用準(zhǔn)確的深度信息減少累積定位誤差。KITTI數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果表明,結(jié)合深度預(yù)測(cè)網(wǎng)絡(luò)的單目SLAM絕對(duì)尺度估計(jì)方法,在無(wú)論有、無(wú)回環(huán)路徑的室外場(chǎng)景下都能有效提高SLAM的定位精度。2.3 絕對(duì)尺度估計(jì)
2.4 特征點(diǎn)匹配與位姿估計(jì)

3 實(shí)驗(yàn)與結(jié)果
3.1 SLAM定位精度對(duì)比實(shí)驗(yàn)

3.2 基于深度學(xué)習(xí)的VO定位精度對(duì)比實(shí)驗(yàn)

3.3 軌跡對(duì)比實(shí)驗(yàn)


4 結(jié)束語(yǔ)
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54