虛擬AP支持的室內(nèi)非線(xiàn)性約束區(qū)域定位
2021-06-25 02:03:00薛衛(wèi)星李清泉周寶定
測(cè)繪學(xué)報(bào) 2021年5期
薛衛(wèi)星,李清泉,周寶定
1. 深圳大學(xué)廣東省城市空間信息工程重點(diǎn)實(shí)驗(yàn)室,廣東 深圳 518060; 2. 深圳大學(xué)土木與交通工程學(xué)院,廣東 深圳 518060
位置信息服務(wù)[1]已經(jīng)成為人們?nèi)粘I畹幕A(chǔ)需求。室外環(huán)境中,全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)為精確的位置服務(wù)提供了保障[2-6]。而當(dāng)進(jìn)入室內(nèi)環(huán)境時(shí),信號(hào)視距傳播難以實(shí)現(xiàn),基于GNSS的室內(nèi)位置服務(wù)變得十分困難。相關(guān)研究表明,人們?nèi)粘I罟ぷ鞯?0%以上是在室內(nèi)[7-9]進(jìn)行的,通過(guò)智能手機(jī)進(jìn)行導(dǎo)航定位[10-11]已經(jīng)逐漸成為人們不可或缺的生活方式。對(duì)于具有線(xiàn)性約束的室內(nèi)狹窄區(qū)域,如室內(nèi)走廊或狹窄通道,行人移動(dòng)方向受到墻體等障礙物約束,只能沿著走廊或通道方向移動(dòng)而不能橫向穿越,使用行為地標(biāo)和地圖輔助的方法[12-17],定位精度可以得到明顯提高。但在開(kāi)闊的室內(nèi)非線(xiàn)性約束區(qū)域,如辦公室或商鋪,行人移動(dòng)方向不受約束,可以向任何平面方向移動(dòng),慣性的累積誤差無(wú)法根據(jù)約束進(jìn)行修正,從而嚴(yán)重影響定位精度,很難使用行為地標(biāo)和地圖輔助的方法進(jìn)行定位。由于無(wú)線(xiàn)信號(hào)的非視距傳播和多路徑傳播,基于到達(dá)時(shí)間、到達(dá)時(shí)間差和到達(dá)角度的室內(nèi)定位技術(shù)同樣也遇到了巨大的挑戰(zhàn)。而隨著智慧城市[18]的建設(shè),Wi-Fi網(wǎng)絡(luò)快速普及,為基于Wi-Fi的室內(nèi)定位[19-26]創(chuàng)造了有利條件。
對(duì)于非線(xiàn)性約束的室內(nèi)區(qū)域,如何有效提高定位的精度,是技術(shù)研究的重點(diǎn),也是實(shí)際應(yīng)用的基礎(chǔ)。具體而言,如何對(duì)位置指紋數(shù)據(jù)庫(kù)進(jìn)行聚類(lèi)分隔,以更合理地反映出指紋點(diǎn)之間的空間幾何關(guān)系;如何篩選出高質(zhì)量AP,以顯著減少在線(xiàn)定位的計(jì)算量并提高定位的精度。
指紋點(diǎn)聚類(lèi)算法方面。為了減少在線(xiàn)階段的搜索范圍,文獻(xiàn)[27—30]提出了基于指紋點(diǎn)聚類(lèi)的Wi-Fi定位方法。但是,傳統(tǒng)的指紋點(diǎn)聚類(lèi)算法只在離線(xiàn)階段對(duì)指紋點(diǎn)(reference points,RP)的幾何鄰近性進(jìn)行分析;而且聚類(lèi)的個(gè)數(shù)需要直接或間接地預(yù)先定義,用戶(hù)需要仔細(xì)地調(diào)整參數(shù)以選擇合適的聚類(lèi)的個(gè)數(shù),而不合適的聚類(lèi)個(gè)數(shù)將會(huì)導(dǎo)致定位結(jié)果的估計(jì)誤差。基于指紋點(diǎn)位置的聚類(lèi)(reference points location clustered,RPLC)算法[28],只在離線(xiàn)階段對(duì)指紋點(diǎn)的幾何鄰近性進(jìn)行聚類(lèi)分析,聚類(lèi)結(jié)果與在線(xiàn)階段的測(cè)試點(diǎn)無(wú)關(guān)。而基于信號(hào)距離的聚類(lèi)(signal distance clustered,SDC)算法[29],僅根據(jù)Wi-Fi接收信號(hào)強(qiáng)度(received signal strength indication,RSSI)在信號(hào)空間的歐氏距離進(jìn)行指紋點(diǎn)聚類(lèi),不考慮指紋點(diǎn)和測(cè)試點(diǎn)之間的幾何距離。文獻(xiàn)[30]利用K均值(K-means)聚類(lèi)算法[30]提高了K鄰近(K nearest neighbor,KNN)算法的性能,但仍然根據(jù)RSSI信號(hào)空間的距離進(jìn)行近鄰指紋點(diǎn)的選取。然而,RSSI在室內(nèi)空間傳播時(shí),會(huì)存在RSSI信號(hào)空間的距離近而幾何距離遠(yuǎn)的問(wèn)題,所以,基于RSSI信號(hào)空間距離聚類(lèi)的方法也可能存在錯(cuò)誤選取鄰近指紋點(diǎn)的問(wèn)題。
AP選取算法方面。基于最大均值的AP選取算法[21]選取RSSI平均值最大的AP。但是,RSSI平均值只能在一定程度上反映該AP理論上的信號(hào)質(zhì)量;RSSI平均值大的AP,也可能信號(hào)強(qiáng)度起伏較大而導(dǎo)致定位效果不佳。基于位置信息增益(information gain,InfoGain)的AP選取算法[31]選擇最具位置辨別力的AP。基于在線(xiàn)互信息(online MI)的AP選取算法[32]采用在線(xiàn)互信息來(lái)度量AP之間的集體辨別能力。但是,AP位置識(shí)別能力高并不一定代表該AP的RSSI質(zhì)量高;RSSI質(zhì)量差的AP,由于信號(hào)微弱而更不穩(wěn)定,可能會(huì)導(dǎo)致更多的位置差異。基于主成分分析(principal component analysis,PCA)的AP選取算法[24]采用主成分分析法的方法進(jìn)行AP選取。但是,在Wi-Fi RSSI非視距傳播和多徑干擾嚴(yán)重的室內(nèi)場(chǎng)景中,RSSI信號(hào)很可能無(wú)法形成主成分。近年來(lái),一些新的AP選擇算法被提出[33-36]。基于誤差分析的AP選擇算法[33]通過(guò)對(duì)用戶(hù)定位結(jié)果的誤差分析選擇AP子集用于定位。基于RSSI區(qū)間重疊度(interval overlap degree,IOD)的AP選擇算法[34]通過(guò)對(duì)指紋點(diǎn)的幾何位置分析來(lái)選取AP。基于無(wú)須標(biāo)定(AP selection based calibration-free,ASCF)的AP選擇算法[35]選擇RSSI差異較大的AP來(lái)構(gòu)建指紋數(shù)據(jù)庫(kù)。基于主梯度方向的算法[36]估計(jì)了每個(gè)AP的主梯度衰減方向。但是,無(wú)線(xiàn)信號(hào)經(jīng)過(guò)反射、折射或衍射后,AP的傳播方向會(huì)發(fā)生改變。因此,同一個(gè)AP在不同區(qū)域的衰減方向是不同的。
針對(duì)以上問(wèn)題,本文提出了虛擬AP支持的室內(nèi)非線(xiàn)性約束區(qū)域的定位方法。
1 虛擬AP定位
一般說(shuō)來(lái),傳播模型法需要以不同定位場(chǎng)景的路徑衰減因子為基礎(chǔ),而位置指紋法則不考慮路徑衰減因子。本文提出的虛擬AP定位,是位置指紋法和傳播模型法的綜合。虛擬AP定位,首先,需要解決不同定位場(chǎng)景中路徑衰減因子簡(jiǎn)化的問(wèn)題;然后,借鑒光反射、折射或衍射后形成虛擬光源,計(jì)算定位小區(qū)域AP的虛擬坐標(biāo);以Wi-Fi信號(hào)到達(dá)定位小區(qū)域視距傳播前最后一次反射、折射或衍射的地方為起點(diǎn),計(jì)算定位小區(qū)域AP的衰減方向;以定位小區(qū)域AP的視距傳播為依據(jù),采用RSSI計(jì)算指紋點(diǎn)和定位點(diǎn)到虛擬AP的幾何距離。
1.1 不同定位場(chǎng)景中路徑衰減因子的簡(jiǎn)化
對(duì)于傳播模型法,為了確定具體定位場(chǎng)景中的路徑衰減因子,需要大量的數(shù)據(jù)采集和處理;而且,某一定位場(chǎng)景中訓(xùn)練得到的路徑衰減因子又很難應(yīng)用到另一個(gè)類(lèi)似的定位場(chǎng)景中。以定位點(diǎn)為中心的定位小區(qū)域的室內(nèi)空間是在同一介質(zhì)(即空氣里,既不在墻里,也不在窗戶(hù)里)的范圍內(nèi),因此,本文首先對(duì)室內(nèi)區(qū)域進(jìn)行劃分,當(dāng)將室內(nèi)區(qū)域劃分為較小的區(qū)域后,定位空間中便只有一種傳播介質(zhì),在該區(qū)域內(nèi)就可以使用同一個(gè)路徑衰減因子。
1.2 定位小區(qū)域AP的虛擬坐標(biāo)和衰減方向
根據(jù)光的直線(xiàn)傳播的定律,在同一種均勻的介質(zhì)中光線(xiàn)是沿直線(xiàn)方式傳播的。而當(dāng)光線(xiàn)由一種介質(zhì)傳播到另一種介質(zhì)時(shí),會(huì)發(fā)生光線(xiàn)的反射和折射;當(dāng)光線(xiàn)在傳播過(guò)程中遇到障礙物時(shí),它的傳播方式將從該障礙物的縫隙或邊界偏離直線(xiàn)傳播,形成衍射。光的反射、折射和衍射具有一個(gè)共同特點(diǎn):根據(jù)光線(xiàn)的直線(xiàn)傳播定律推算出來(lái)的光源不是真實(shí)的光源,而是虛擬光源。
同樣,無(wú)線(xiàn)信號(hào)在室內(nèi)環(huán)境中傳播,一般會(huì)經(jīng)過(guò)反射、折射或衍射,然后到達(dá)定位小區(qū)域。而Wi-Fi信號(hào)在定位小區(qū)域信號(hào)視距傳播的起始點(diǎn),則是其最后一次反射、折射或衍射的地方(也可能是AP的實(shí)際位置)。這里,主要研究Wi-Fi信號(hào)經(jīng)過(guò)最后一次反射、折射或衍射后,在定位小區(qū)域的傳播情況。根據(jù)定位小區(qū)域Wi-Fi信號(hào)的視距傳播情況,按照無(wú)線(xiàn)信號(hào)衰減公式和簡(jiǎn)化后的路徑衰減因子推算AP的“虛擬位置”,稱(chēng)為定位小區(qū)域AP的虛擬坐標(biāo)。根據(jù)定位小區(qū)域Wi-Fi信號(hào)的視距傳播情況,按照定位小區(qū)域臨近指紋點(diǎn)的聚類(lèi)結(jié)果推算AP的衰減方向,稱(chēng)為定位小區(qū)域AP的衰減方向。接下來(lái),就可以根據(jù)定位小區(qū)域AP的虛擬坐標(biāo)進(jìn)行指紋點(diǎn)的聚類(lèi),根據(jù)定位小區(qū)域AP的衰減方向進(jìn)行AP的選取。虛擬AP支持的室內(nèi)非線(xiàn)性約束區(qū)域定位流程如圖1所示。
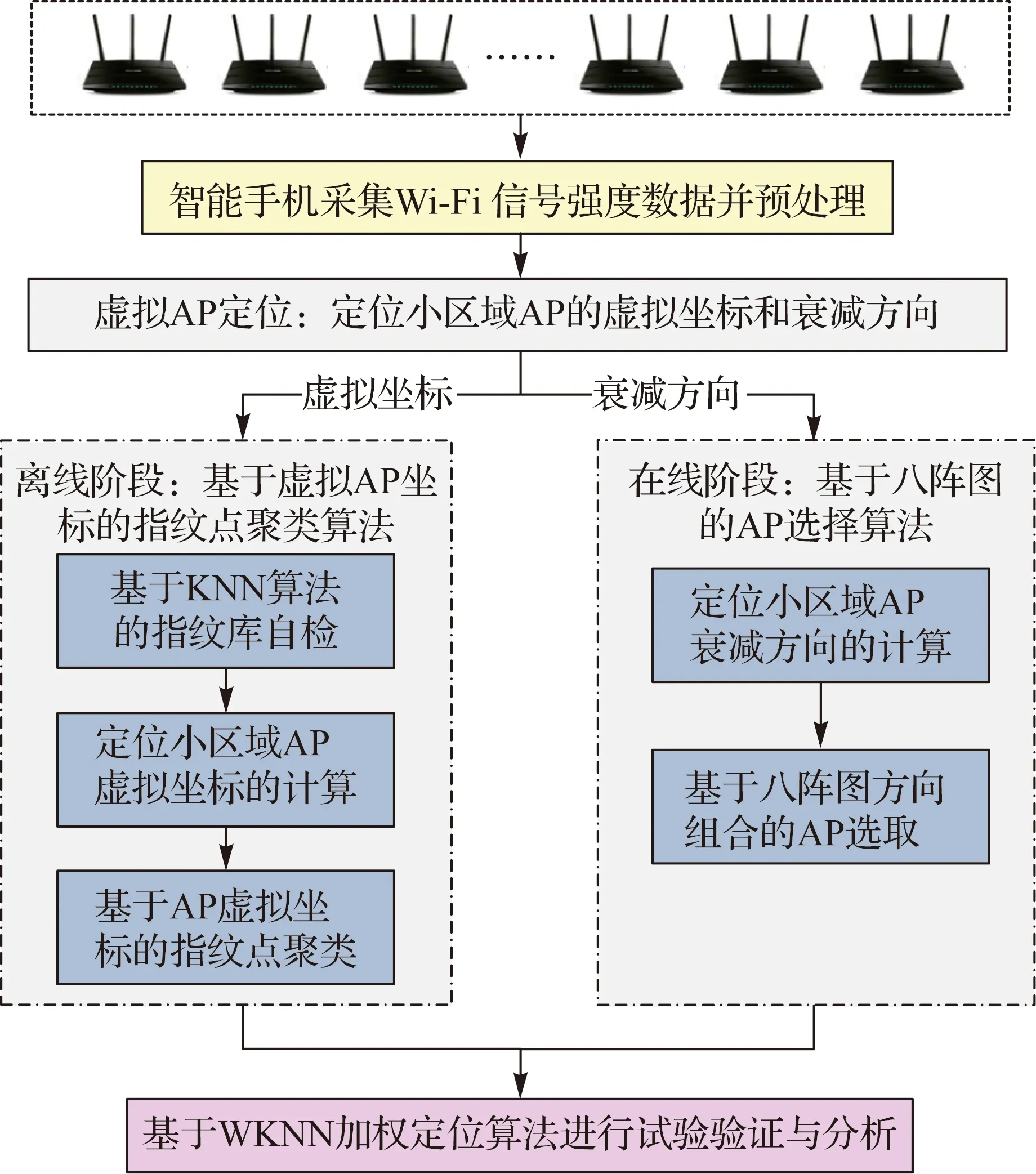
圖1 虛擬AP支持的室內(nèi)非線(xiàn)性約束區(qū)域定位流程Fig.1 Flowchart of the virtual AP based positioning method
2 基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)
基于AP虛擬坐標(biāo)的指紋點(diǎn)聚類(lèi)算法主要針對(duì)無(wú)線(xiàn)性約束區(qū)域的室內(nèi)定位,該算法不需要預(yù)先設(shè)置聚類(lèi)個(gè)數(shù),不僅能實(shí)現(xiàn)聚類(lèi)過(guò)程自動(dòng)化,而且能保證離線(xiàn)階段聚類(lèi)方法與在線(xiàn)階段定位方法的一致性。算法主要包括基于KNN算法的指紋庫(kù)自檢,定位小區(qū)域AP虛擬坐標(biāo)的計(jì)算和基于AP虛擬坐標(biāo)的指紋點(diǎn)聚類(lèi)3部分。基于KNN算法的指紋庫(kù)自檢是為了獲取該房間或大廳內(nèi)定位誤差最小時(shí)對(duì)應(yīng)的K值。定位小區(qū)域AP虛擬坐標(biāo)的計(jì)算是將簡(jiǎn)化后的路徑衰減因子代入到無(wú)線(xiàn)信號(hào)衰減公式中來(lái)推算每個(gè)指紋點(diǎn)對(duì)應(yīng)的AP的虛擬坐標(biāo)。當(dāng)路徑衰減因子變化時(shí),AP虛擬坐標(biāo)總是以相同組群的方式同時(shí)變化;因此可以基于此組群分類(lèi)的方式對(duì)指紋點(diǎn)進(jìn)行聚類(lèi)。
2.1 基于KNN算法的指紋庫(kù)自檢
在同一個(gè)非線(xiàn)性約束的室內(nèi)區(qū)域,所有的指紋點(diǎn)依次作為測(cè)試點(diǎn)進(jìn)行定位測(cè)試,從身份編號(hào)(identity,ID)最小的指紋點(diǎn)開(kāi)始。所有的指紋點(diǎn)都分配了不同的ID號(hào),并將指紋點(diǎn)ID編號(hào)與指紋點(diǎn)位置、AP名稱(chēng)和接收信號(hào)強(qiáng)度相關(guān)聯(lián)。需要說(shuō)明的是,指紋點(diǎn)ID編號(hào)的編號(hào)方式對(duì)算法的聚類(lèi)結(jié)果沒(méi)有影響,因?yàn)槊總€(gè)指紋點(diǎn)都將逐個(gè)獨(dú)立地被作為測(cè)試點(diǎn)進(jìn)行定位測(cè)試。此外,文獻(xiàn)[37]使用眾包的Wi-Fi RSSI數(shù)據(jù)來(lái)識(shí)別不同房間的指紋點(diǎn)從而實(shí)現(xiàn)了房間級(jí)的定位。這里,本文假設(shè)不同房間的指紋點(diǎn)已被成功識(shí)別,本節(jié)提出的聚類(lèi)算法將主要針對(duì)某一房間內(nèi)的指紋點(diǎn)的聚類(lèi)。當(dāng)某一指紋點(diǎn)被視為測(cè)試點(diǎn)時(shí),而同一房間內(nèi)的其他指紋點(diǎn)仍然是指紋點(diǎn)。
首先,設(shè)置不同的K值,如K=3、K=4或K=5。對(duì)于某一K值,例如,當(dāng)K=3時(shí),“測(cè)試點(diǎn)”的位置用KNN算法逐個(gè)估算。然后,得到相應(yīng)的定位誤差統(tǒng)計(jì)。對(duì)K的其他值,重復(fù)該過(guò)程。最后,以均方根誤差(root mean square error,RMSE)為指標(biāo),選擇定位誤差最小的K值。
2.2 定位小區(qū)域AP虛擬坐標(biāo)的計(jì)算
以1號(hào)指紋點(diǎn)為例。當(dāng)RP1作為測(cè)試點(diǎn)時(shí),同一房間內(nèi)的其余指紋點(diǎn)仍作為指紋點(diǎn)使用。根據(jù)2.1節(jié)中確定的K值,用KNN算法得到該測(cè)試點(diǎn)對(duì)應(yīng)的K個(gè)鄰近指紋點(diǎn)。根據(jù)無(wú)線(xiàn)信號(hào)衰減模型[38],Wi-Fi RSSI衰減公式為
(1)
式中,RSSI(d0)和RSSI(di)分別是距離AP信號(hào)源d0和di處的接收信號(hào)強(qiáng)度;η是路徑衰減因子。d0和RSSI(d0)一般通過(guò)經(jīng)驗(yàn)建模預(yù)先設(shè)定,本文中d0取值1 m,RSSI(d0)取值為-20 dB。因此,未知幾何距離di可以通過(guò)RSSI(di)和η計(jì)算得到
(2)
同時(shí),未知幾何距離di也可以通過(guò)AP信號(hào)源的坐標(biāo)和指紋點(diǎn)的坐標(biāo)計(jì)算得到
(3)
式中,(xj,yj)是第j個(gè)AP的虛擬位置(virtual position,VP);(xi,yi)是第i個(gè)RP的位置坐標(biāo)。這里假設(shè)總共有M個(gè)AP和N個(gè)指紋點(diǎn)。把式(3)代入式(2),然后把方程兩邊都平方。由于式(3)的右側(cè)只是距離的估計(jì)值,引入用φi(xj,yj)表示的坐標(biāo)殘差

(4)
將路徑衰減因子的數(shù)值設(shè)為固定值,簡(jiǎn)化無(wú)線(xiàn)信號(hào)衰減公式;使用這K個(gè)鄰近指紋點(diǎn),結(jié)合線(xiàn)性最小二乘平差,計(jì)算AP的虛擬坐標(biāo)。對(duì)未知坐標(biāo)參數(shù)(xj,yj)分別求偏導(dǎo),系數(shù)矩陣B的元素為
(5)
使用線(xiàn)性最小二乘平差,得到坐標(biāo)殘差平方和并將其最小化
(6)
測(cè)試完該室內(nèi)非線(xiàn)性約束區(qū)域內(nèi)所有N個(gè)指紋點(diǎn)后,每個(gè)AP可以得到N個(gè)虛擬坐標(biāo),M個(gè)AP就有N×M個(gè)虛擬坐標(biāo)。在同一個(gè)房間內(nèi),每個(gè)指紋點(diǎn)都可以接收房間內(nèi)所有AP的信號(hào);如果一個(gè)AP的信號(hào)無(wú)法被所有指紋點(diǎn)都接收,則剔除AP。指紋點(diǎn)與所有AP虛擬位置的對(duì)應(yīng)關(guān)系見(jiàn)表1。
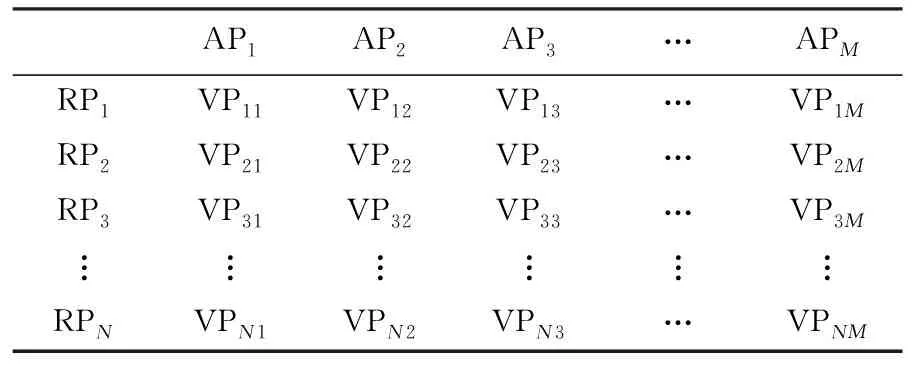
表1 指紋點(diǎn)與AP虛擬坐標(biāo)的對(duì)應(yīng)關(guān)系
2.3 基于AP虛擬坐標(biāo)的指紋點(diǎn)聚類(lèi)
圖2為101房間試驗(yàn)點(diǎn)分布示意。由圖2中第1列AP1開(kāi)始,計(jì)算虛擬坐標(biāo)VP11和與剩余N-1個(gè)虛擬坐標(biāo)VPi1之間的距離。如果N-1個(gè)距離中的任何一個(gè)小于預(yù)先定義的閾值,則選擇相應(yīng)的RP,所有選定的RP和RP1都形成一個(gè)RP聚類(lèi)。然后,在未聚類(lèi)的其余RP中,選擇ID號(hào)最小的RP(例如RPmid),并計(jì)算VPmid1與剩余RP對(duì)應(yīng)的VPi1之間的距離。同樣,將距離小于閾值的VP相應(yīng)的RP與RPmid形成第2個(gè)聚類(lèi)。重復(fù)該過(guò)程,直到所有N個(gè)RP聚類(lèi)結(jié)束。該過(guò)程是自動(dòng)進(jìn)行的,聚類(lèi)的個(gè)數(shù)不需要預(yù)先設(shè)置。請(qǐng)注意,到目前為止,只完成了AP1對(duì)應(yīng)的第1列的指紋點(diǎn)的聚類(lèi)。繼續(xù)從AP2對(duì)應(yīng)的第2列開(kāi)始,重復(fù)上述聚類(lèi)過(guò)程。直到所有M列都聚類(lèi)完成為止。
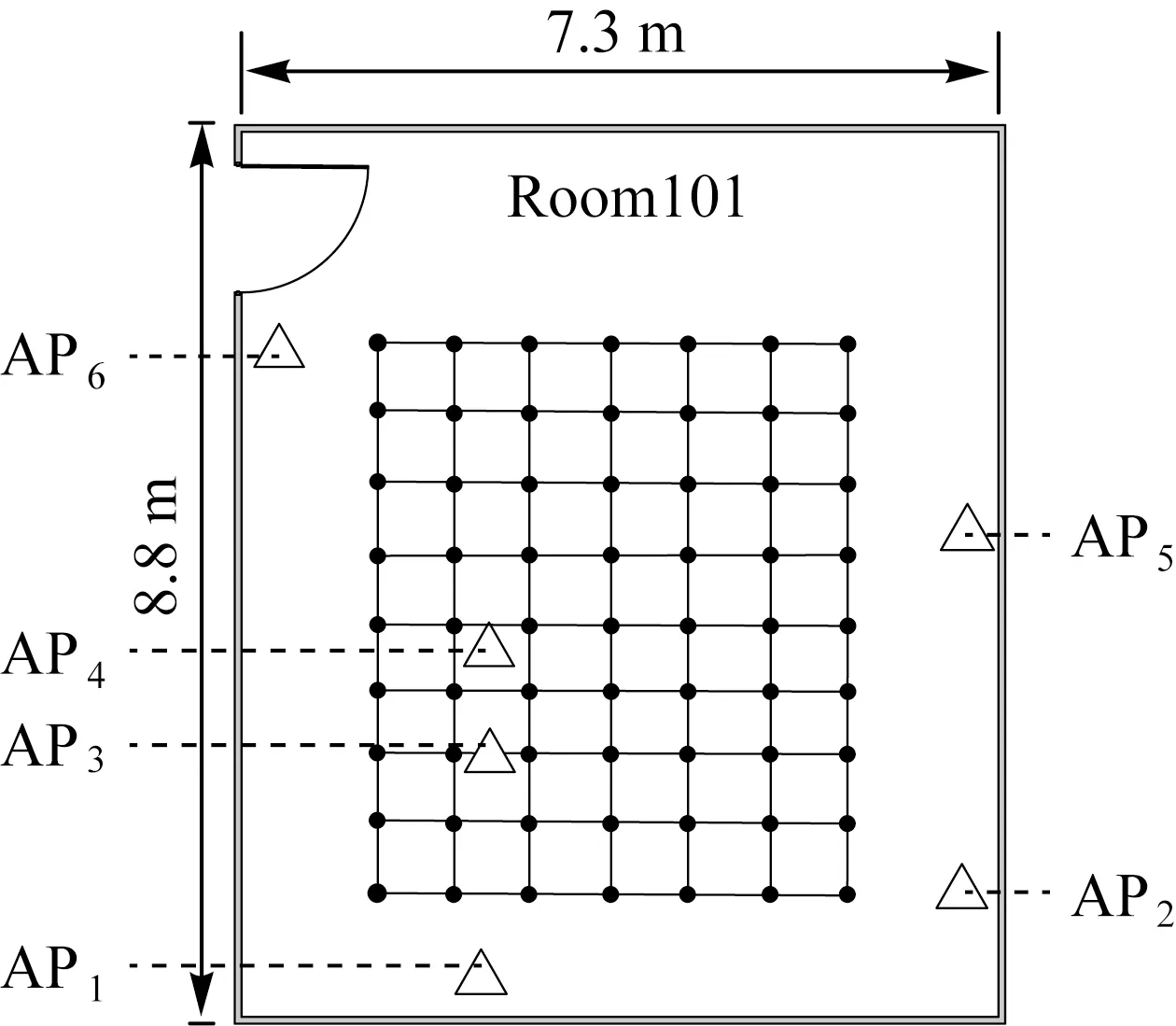
圖2 101房間試驗(yàn)點(diǎn)分布示意Fig.2 Schematic diagram of test point distribution in room 101
在完成聚類(lèi)過(guò)程后,將在每個(gè)聚類(lèi)內(nèi)的所有指紋點(diǎn)的RSSI取平均值,形成一個(gè)單獨(dú)的RSSI,作為該聚類(lèi)的代表
(7)
3 基于八陣圖的AP選取
在室內(nèi)傳播的無(wú)線(xiàn)信號(hào),經(jīng)過(guò)墻壁、門(mén)窗和室內(nèi)大型家具等障礙物后會(huì)發(fā)生反射、折射或衍射現(xiàn)象,其傳播方向會(huì)發(fā)生變化。而在測(cè)試點(diǎn)周?chē)男《ㄎ粎^(qū)域內(nèi),AP信號(hào)可以認(rèn)為是視距傳播,其衰減方向可以通過(guò)該測(cè)試點(diǎn)鄰近指紋點(diǎn)的RSSI信號(hào)聚類(lèi)來(lái)計(jì)算。這樣,同一個(gè)AP在房間內(nèi)不同測(cè)試點(diǎn)的AP衰減方向就可能不同,因此,不同測(cè)試點(diǎn)的AP子集的選取情況也可能不同,這就是本文方法與傳統(tǒng)AP選取算法的主要區(qū)別。
八陣圖由均勻間隔45°的8個(gè)基本方向組成。定位誤差可分解為X軸定位誤差和Y軸定位誤差,通過(guò)最小二乘估計(jì)可以使X軸和Y軸方向的殘差最小。為了嚴(yán)格控制定位誤差,本文采用八陣圖的8個(gè)基本方向的45°間隔為標(biāo)準(zhǔn),選取定位小區(qū)域衰減方向組合最優(yōu)的4個(gè)AP用于在線(xiàn)定位。主要包括定位小區(qū)域AP衰減方向的計(jì)算和基于八陣圖方向組合的AP選取兩部分。
3.1 定位小區(qū)域AP衰減方向的計(jì)算
首先,根據(jù)KNN算法選擇K個(gè)鄰近指紋點(diǎn);然后,用K-means算法對(duì)RSSI值聚類(lèi),將這K個(gè)鄰近指紋點(diǎn)聚成兩類(lèi)。最后,用這兩個(gè)聚類(lèi)的坐標(biāo)中心來(lái)計(jì)算AP的衰減方向。AP衰減方向計(jì)算的具體過(guò)程如下:
(1) 選擇一個(gè)AP。
(2) 隨機(jī)選擇兩個(gè)不相鄰的指紋點(diǎn),取該AP在這兩個(gè)指紋點(diǎn)處的RSSI(如RSSI1和RSSI2)作為聚類(lèi)中心。
(3) 計(jì)算其余(K-2)指紋點(diǎn)的RSSI值與這兩個(gè)RSSI中心之間的差值,記為ΔRSSI1i和ΔRSSI2i
(8)
比較ΔRSSI1i和ΔRSSI2i的大小,并將對(duì)應(yīng)的鄰近指紋點(diǎn)分配到差值較小的那一類(lèi),直到所有鄰近指紋點(diǎn)及其RSSI分配完畢;
(4)重新計(jì)算并更新聚類(lèi)中心
(9)
式中,假設(shè)第1個(gè)聚類(lèi)中有L1個(gè)鄰近指紋點(diǎn);第2個(gè)聚類(lèi)中有L2個(gè)鄰近指紋點(diǎn);C1和C2分別是這兩個(gè)RSSI聚類(lèi)的聚類(lèi)中心。
(5) 重復(fù)步驟(3)—(4),直到兩個(gè)聚類(lèi)中心不再變化為止。
(10)
(7) 計(jì)算該AP的衰減方向
(11)
(8)選擇下一個(gè)AP并重復(fù)步驟(2)—(7),直到所有M個(gè)AP的衰減方向都計(jì)算出來(lái)。
3.2 基于八陣圖方向組合的AP選取
(1)計(jì)算每?jī)蓚€(gè)AP衰減方向之間的夾角
(12)
第3個(gè)軸的方向可以根據(jù)這兩個(gè)軸的方向來(lái)初步確定
(13)
(2) 計(jì)算其余M-3個(gè)AP衰減方向和axis3′之間的差,選取與axis3′差值最小的AP衰減方向作為axis3。同理,根據(jù)axis4和axis3的垂直關(guān)系來(lái)確定axis4
(14)
(3) 選擇這4個(gè)軸對(duì)應(yīng)的4個(gè)AP進(jìn)行在線(xiàn)定位。
4 試驗(yàn)驗(yàn)證
為了驗(yàn)證基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法和基于八陣圖的AP選取算法的性能,分別在武漢大學(xué)測(cè)繪學(xué)院和深圳大學(xué)科技樓進(jìn)行了試驗(yàn)驗(yàn)證。試驗(yàn)分析時(shí),RSSI濾波均采用基于最大平均值的算法[39]對(duì)RSSI數(shù)據(jù)進(jìn)行預(yù)處理,定位計(jì)算采用經(jīng)典的加權(quán)K近鄰(weighted k nearest neighbor,WKNN)算法。
4.1 基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法定位效果分析
為了驗(yàn)證基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法的性能,在武漢大學(xué)測(cè)繪學(xué)院一樓101房間進(jìn)行了試驗(yàn)。圖2顯示了101房間的平面圖,定位區(qū)域?yàn)?.65 m×0.65 m的網(wǎng)格,其中6個(gè)AP用三角形表示,63個(gè)指紋點(diǎn)用圓點(diǎn)表示。然后在101房間的定位區(qū)域內(nèi)隨機(jī)選擇63個(gè)測(cè)試點(diǎn)。每個(gè)指紋點(diǎn)用1 s的采樣率采集RSSI約5 min,每個(gè)測(cè)試點(diǎn)用0.2 s的采樣率采集RSSI 5 s。為了確保一致性,所有數(shù)據(jù)都是使用同一部手機(jī)收集的。為方便起見(jiàn),在每個(gè)房間也建立了獨(dú)立的坐標(biāo)系。
4.1.1 不同K值對(duì)定位精度的影響
當(dāng)K值取不同值時(shí),會(huì)對(duì)定位精度產(chǎn)生影響。為了選擇最佳K值,表2顯示了不同K值對(duì)WKNN算法的定位誤差統(tǒng)計(jì),K值范圍從2到10。從表2可以看出,當(dāng)K值從2到10變化時(shí),WKNN定位誤差的平均誤差和均方根誤差RMSE均隨K的增大先減小后增大;當(dāng)K等于5時(shí),RMSE和平均定位誤差均為最小值。因此K設(shè)為5。
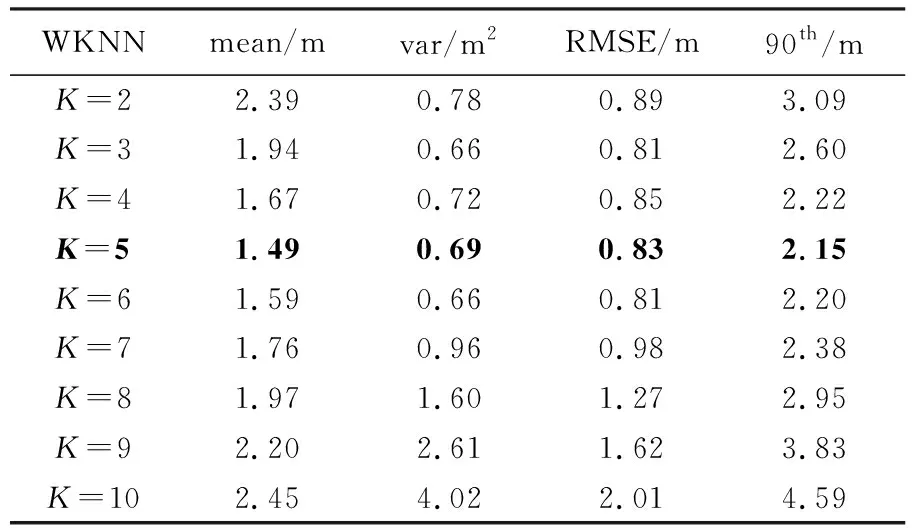
表2 K值從2到10變化時(shí)對(duì)WKNN算法的定位誤差統(tǒng)計(jì)
4.1.2 不同路徑衰減因子對(duì)定位精度的影響
根據(jù)式(4),當(dāng)路徑衰減因子取值不同時(shí),可能會(huì)對(duì)AP的虛擬坐標(biāo)產(chǎn)生影響。一般來(lái)說(shuō),無(wú)線(xiàn)信號(hào)在空氣中的路徑衰減因子是2,在有混凝土墻和走廊隔開(kāi)的辦公樓中的路徑衰減因子大約是3。表3顯示了路徑衰減因子范圍從2到4變化時(shí)對(duì)AP的虛擬坐標(biāo)(以AP1的X坐標(biāo)為例)的影響。
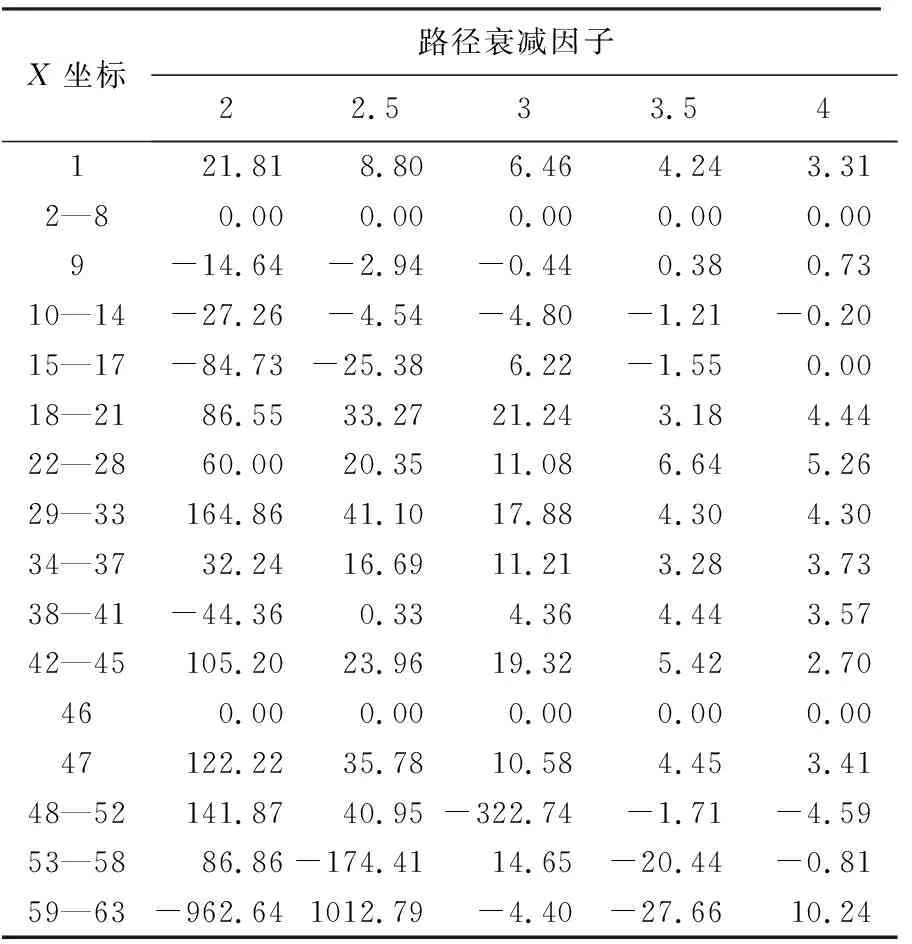
表3 路徑衰減因子從2到4變化時(shí)對(duì)虛擬AP1的X坐標(biāo)的影響
由表3可以看出,當(dāng)路徑衰減因子取不同值時(shí),路徑衰減因子對(duì)AP的虛擬坐標(biāo)的影響是顯著的。然而,當(dāng)路徑衰減因子在2到4之間變化時(shí),AP虛擬坐標(biāo)總是以相同組群的方式同時(shí)變化,因此可以基于此組群分類(lèi)的方式對(duì)相應(yīng)的指紋點(diǎn)(視為測(cè)試點(diǎn))進(jìn)行聚類(lèi)分隔。
4.1.3 定位精度比較
采用位置誤差的累積分布函數(shù)(cumulative distribution function,CDF),分析4種不同算法對(duì)定位精度的影響,即WKNN算法、指紋點(diǎn)位置聚類(lèi)算法(RPLC)[28]、信號(hào)距離聚類(lèi)算法(SDC)[29]和基于AP虛擬坐標(biāo)(virtual AP coordinates,VAPC)的指紋點(diǎn)聚類(lèi)算法。分別選擇了0.3 m、0.5 m、0.8 m、1 m、1.5 m、2 m、2.5 m和3 m等8個(gè)不同的位置誤差閾值。
由圖3所示的結(jié)果可以看出,基于AP虛擬坐標(biāo)的指紋點(diǎn)聚類(lèi)算法的定位誤差也比其他算法小得多。例如,當(dāng)誤差閾值為1 m和2 m,該定位算法的CDF分別為50.79%和93.65%,高于WKNN算法的30.16%和74.60%,RPLC算法的31.75%和69.84%,以及SDC算法的30.16%和71.43%。表4顯示了相應(yīng)的定位誤差的統(tǒng)計(jì)結(jié)果。
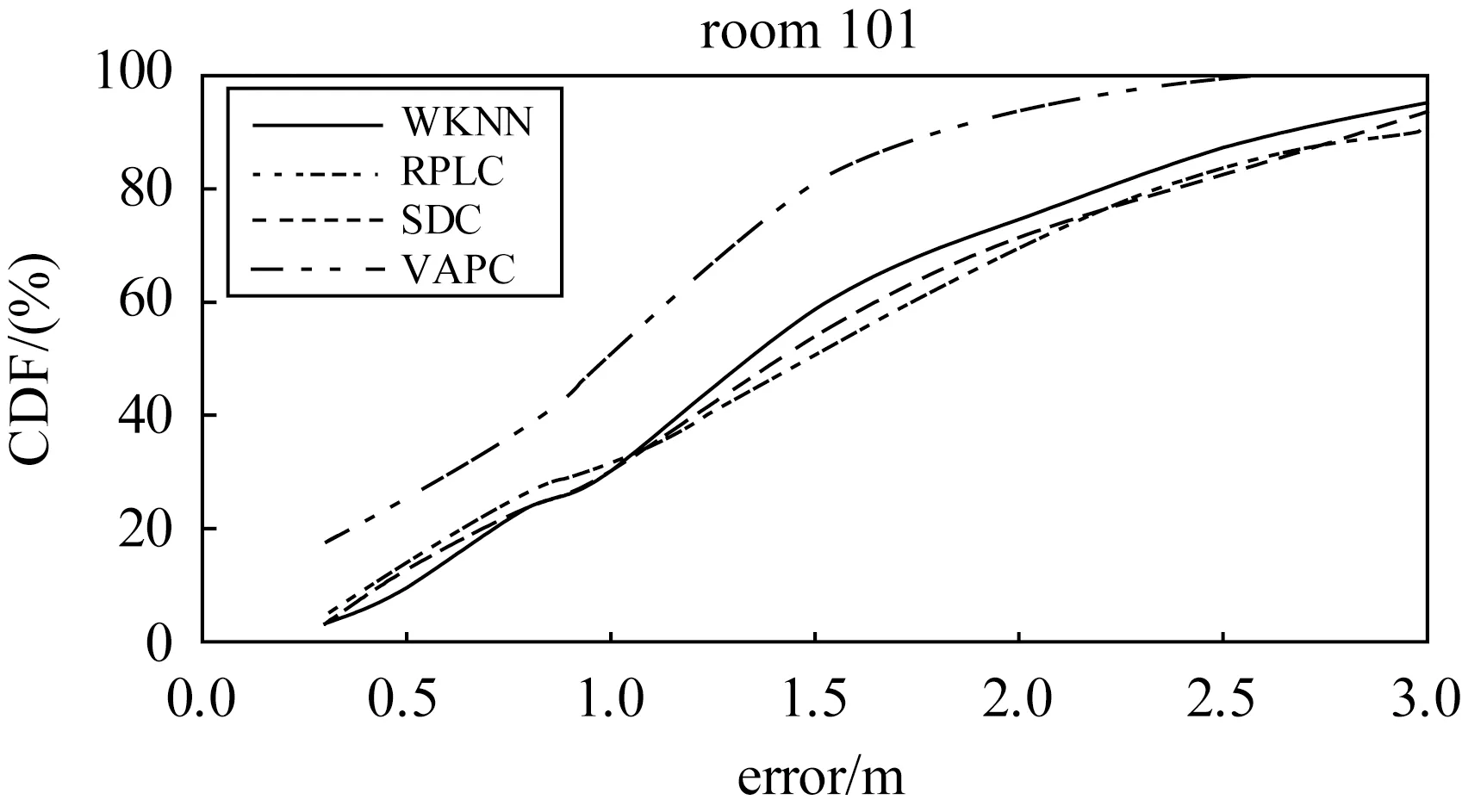
圖3 4種算法定位精度比較Fig.3 Comparison of location accuracy of four different algorithms
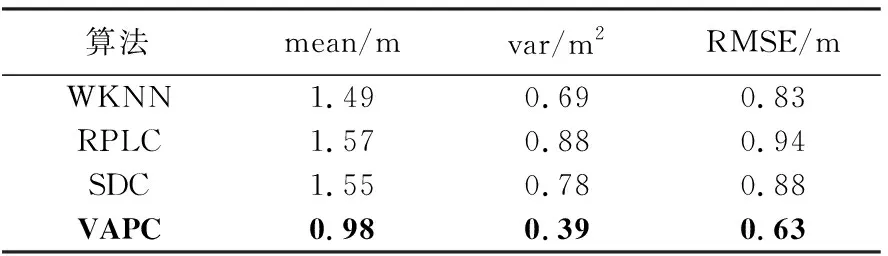
表4 4種算法的定位誤差統(tǒng)計(jì)
由表4中可以看到,基于AP虛擬坐標(biāo)的指紋點(diǎn)聚類(lèi)算法定位結(jié)果定位誤差的RMSE為0.63 m,優(yōu)于WKNN算法的0.83 m、RPLC算法的0.94 m和WKNN算法的0.88 m。
4.2 基于八陣圖的AP選取算法定位效果分析
為了驗(yàn)證基于八陣圖的AP選取算法的性能,在深圳大學(xué)科技樓14樓進(jìn)行了試驗(yàn),如圖4所示。手機(jī)接收了超過(guò)50個(gè)Wi-Fi熱點(diǎn)的RSSI數(shù)據(jù)。科技樓14樓整體建立了指紋點(diǎn)數(shù)據(jù)庫(kù),相鄰指紋點(diǎn)間距約為2 m,定位區(qū)域內(nèi)63個(gè)測(cè)試點(diǎn)采用1 m×1 m格網(wǎng)采用。采用1 s的采樣率,每個(gè)指紋點(diǎn)采集RSSI約60 s,每個(gè)測(cè)試點(diǎn)采集RSSI約25 s。
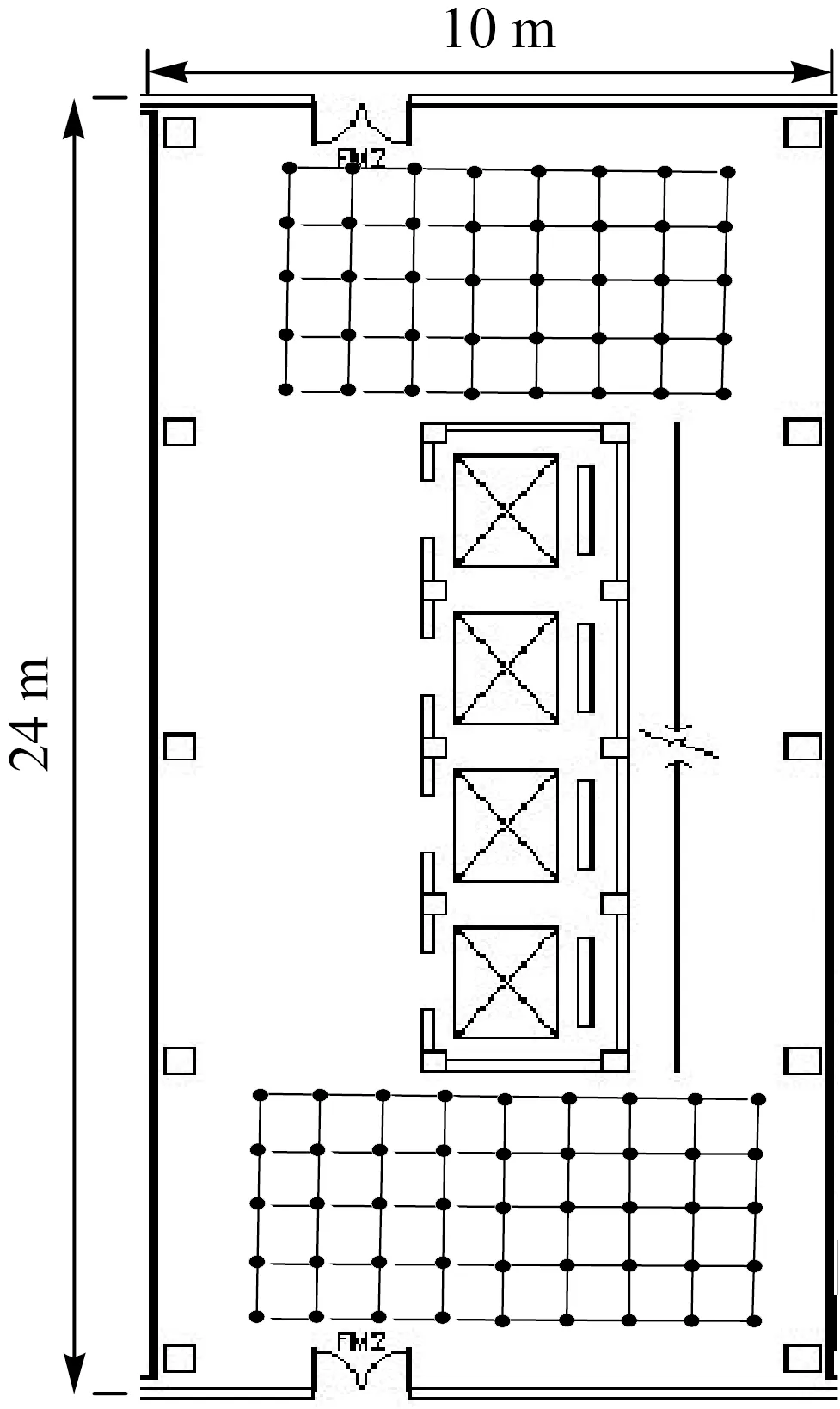
圖4 科技樓14樓大廳的試驗(yàn)平面圖Fig.4 Floor plan of two halls in the fourteenth floor
4.2.1 不同AP數(shù)量對(duì)定位精度的影響
為了獲得良好的定位性能,需要根據(jù)平均定位誤差為每種算法選擇合適數(shù)量的AP個(gè)數(shù)。圖5顯示了當(dāng)AP數(shù)量從1到20變化時(shí),北大廳和南大廳中MaxMean、InfoGain、PCA、online MI、IOD和ASCF 6種AP選取算法的平均位置誤差。通過(guò)對(duì)比分析可知,MaxMean、InfoGain、PCA、online MI、IOD和ASCF算法在不同的試驗(yàn)區(qū)域中的最優(yōu)AP數(shù)目是不同的(表5)。以PCA算法為例,在2個(gè)大廳中最優(yōu)AP數(shù)目分別為11和17。而本文提出的基于八陣圖的AP選取算法只需要4個(gè)AP,因此在實(shí)際應(yīng)用中具有更好的場(chǎng)景適應(yīng)性。
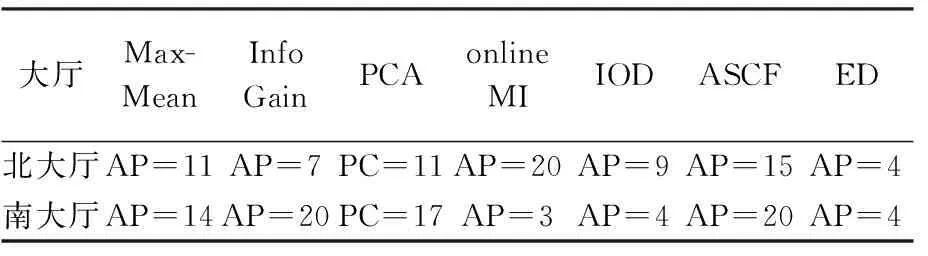
表5 6種算法在南北兩個(gè)大廳最合適的AP個(gè)數(shù)統(tǒng)計(jì)
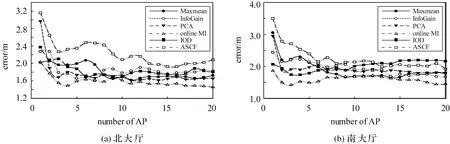
圖5 MaxMean、InfoGain、PCA、online MI、IOD和ASCF算法在不同大廳的平均誤差Fig.5 Mean error of MaxMean, InfoGain MaxMean、InfoGain、PCA、online MI、IOD and ASCF in different halls
4.2.2 定位精度比較
分析7種不同算法對(duì)定位精度的影響,即MaxMean[20]、InfoGain[31]、PCA[24]、online MI[32]、IOD[34]和ASCF[35]算法和基于八陣圖(Eight-Diagram,ED)的AP選取算法。7種算法在南北大廳定位的位置誤差CDF如圖6所示。由圖6所示的結(jié)果可以看出,基于八陣圖的AP選取算法的性能明顯優(yōu)于其他算法。以北大廳為例,當(dāng)誤差閾值為1 m和2 m時(shí),基于八陣圖的AP選取算法的誤差CDF分別為50.00%和82.50%,優(yōu)于MaxMean算法的30.00%和72.50%,InfoGain算法的27.50%和72.50%,PCA算法的22.50%和72.50%,online MI算法的32.50%和80.00%,IOD算法的27.50%和65.00%,以及ASCF算法的20.00%和62.50%。同樣,在南大廳,當(dāng)誤差閾值為1 m和2 m時(shí),基于八陣圖的AP選取算法的誤差CDF分別為35.56%和80.00%,優(yōu)于MaxMean算法的28.89%和68.89%,InfoGain算法的20.00%和71.11%,PCA算法的22.22%和62.22%,online MI算法的28.89%和80.00%,IOD算法的17.78%和64.44%,以及ASCF算法的22.22%和57.78%。
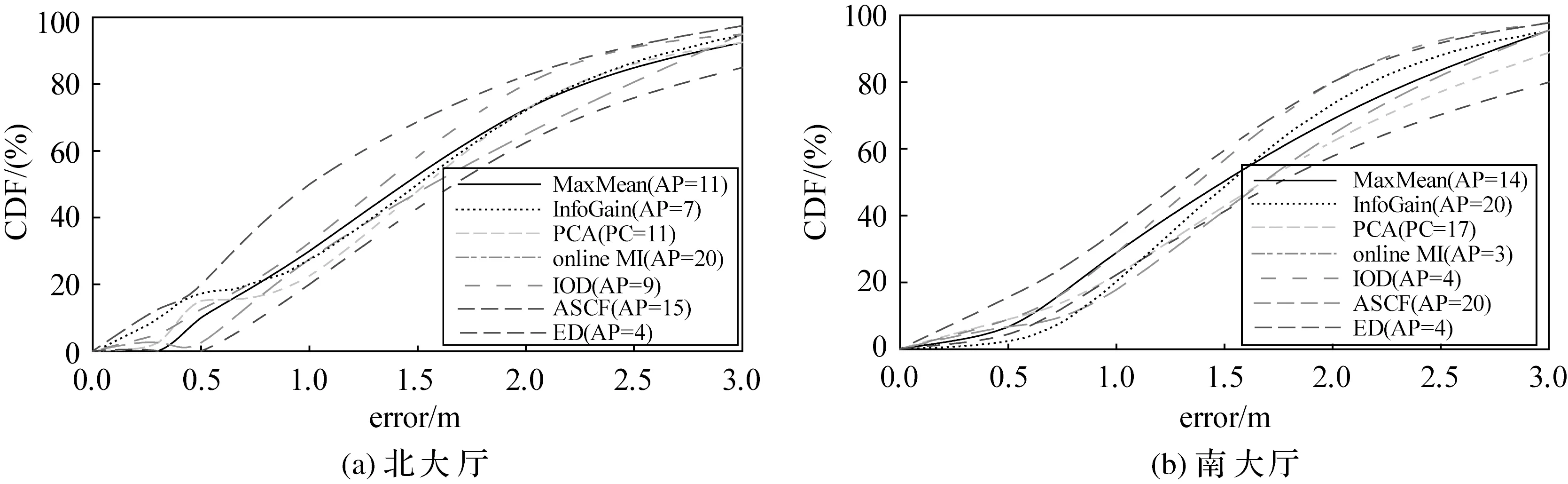
圖6 7種不同AP選取算法定位精度比較Fig.6 Location accuracy comparison of sevendifferent AP selection algorithms
相應(yīng)的位置誤差統(tǒng)計(jì)結(jié)果見(jiàn)表6。表6所示的北大廳結(jié)果表明,基于八陣圖的AP選取算法定位結(jié)果定位誤差的RMSE為1.52 m,優(yōu)于MaxMean算法的1.82 m、InfoGain算法的1.82 m、PCA算法的1.83 m、online MI算法的1.66 m、IOD算法的1.87 m和ASCF算法的2.15 m。同樣,基于八陣圖的AP選取算法在南大廳定位結(jié)果定位誤差的RMSE為1.56 m,優(yōu)于MaxMean算法的1.94 m、InfoGain算法的1.85 m、PCA算法的2.08 m、online MI算法的1.60 m、IOD算法的1.99 m和ASCF算法的2.20 m。
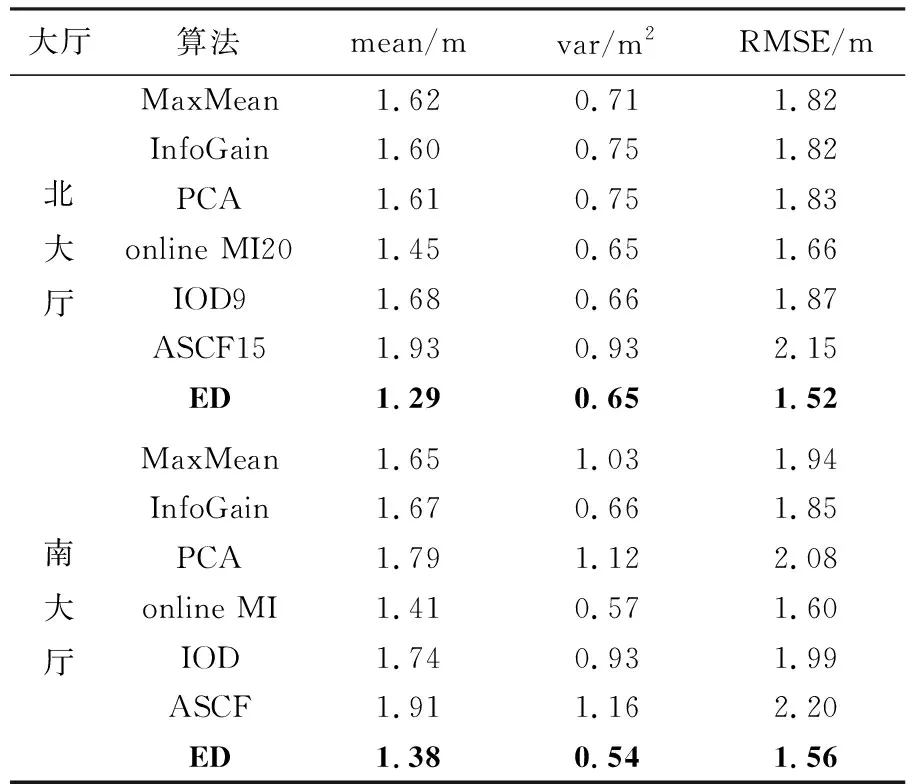
表6 7種算法的定位誤差統(tǒng)計(jì)
4.3 虛擬AP支持的室內(nèi)非線(xiàn)性約束區(qū)域定位效果分析
為了驗(yàn)證虛擬AP支持的定位算法在室內(nèi)非線(xiàn)性約束區(qū)域的綜合定位性能,將離線(xiàn)階段的基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法和在線(xiàn)階段的基于八陣圖的AP選取算法用在同一個(gè)定位場(chǎng)景進(jìn)行定位分析。以深圳大學(xué)科技樓14樓大廳的兩個(gè)試驗(yàn)為例,基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法(VAPC)、基于八陣圖的AP選取算法(ED)以及二者融合后的算法(VAPC-ED)在南北大廳定位的位置誤差CDF如圖7所示。從圖7所示的結(jié)果可以看出,二者融合后算法的性能優(yōu)于VAPC和ED算法。當(dāng)誤差閾值為1 m和2 m時(shí),二者融合后算法在北大廳的誤差CDF分別為80.00%和90.00%,在南大廳的誤差CDF分別為64.44%和91.11%,表現(xiàn)出了良好的定位效果。
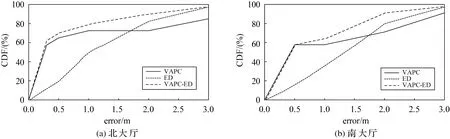
圖7 3種不同算法定位精度比較Fig.7 Location accuracy comparison of three different algorithms
相應(yīng)的位置誤差統(tǒng)計(jì)結(jié)果見(jiàn)表7。表7所示的北大廳結(jié)果表明,融合后的算法定位結(jié)果定位誤差的RMSE為1.10 m,優(yōu)于VAPC算法的1.70 m和ED算法的1.52 m。同樣,融合后的算法在南大廳定位結(jié)果定位誤差的RMSE為1.17 m,優(yōu)于VAPC算法的1.62 m和ED算法的1.56 m。
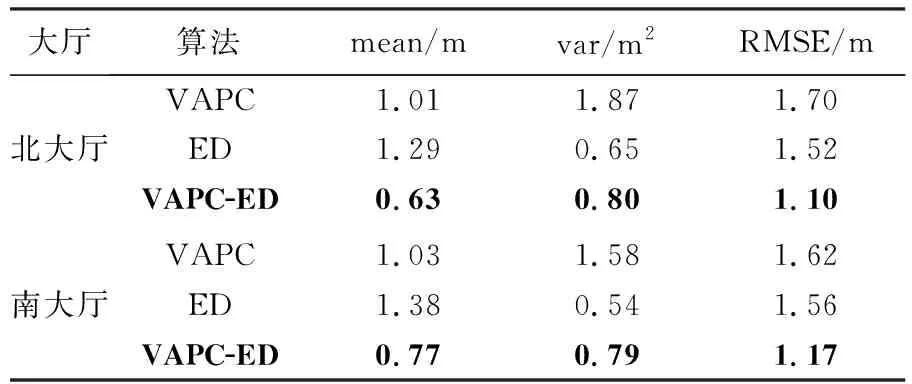
表7 3種算法的定位誤差統(tǒng)計(jì)
5 結(jié) 論
針對(duì)目前室內(nèi)非線(xiàn)性約束區(qū)域的定位精度較低、存在大量冗余AP、無(wú)法使用行為地標(biāo)和室內(nèi)地圖校正等問(wèn)題,本文提出虛擬AP定位。離線(xiàn)階段,以定位小區(qū)域AP的虛擬坐標(biāo)為依據(jù),提出一種基于虛擬AP坐標(biāo)的指紋點(diǎn)聚類(lèi)算法;算法無(wú)須預(yù)先設(shè)定聚類(lèi)個(gè)數(shù)即可實(shí)現(xiàn)指紋點(diǎn)聚類(lèi)的自動(dòng)化,提高了定位精度并降低了在線(xiàn)階段指紋匹配的計(jì)算量。在線(xiàn)階段,以定位小區(qū)域AP的衰減方向?yàn)橐罁?jù),提出了一種基于八陣圖的AP選取算法;算法利用AP方向組合控制約束信息進(jìn)行AP選取,顯著減少在線(xiàn)定位的AP數(shù)量,提高了定位精度并降低了用戶(hù)定位的計(jì)算量。虛擬AP支持的兩種算法融合后,在室內(nèi)非線(xiàn)性約束區(qū)域表現(xiàn)出了更好的定位效果。從而提高室內(nèi)非線(xiàn)性約束區(qū)域定位的精度和穩(wěn)健性,促進(jìn)室內(nèi)定位技術(shù)在行人導(dǎo)航、智能交通及智慧城市等領(lǐng)域的應(yīng)用。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52