基于視覺檢測與定位的智能車導航系統
2021-06-25 11:10:36雷楊趙玉榮王亓劍張自強
電子測試 2021年4期
關鍵詞:智能
雷楊,趙玉榮,王亓劍,張自強
(安徽新華學院電子通信工程學院,安徽合肥,230088)
0 引言
導航系統對自動駕駛的重要性日益凸顯,車輛導航系統不僅可以確定車輛的最優路徑,而且可以實時監測車輛的速度和加速度。該智能車導航系統使用視覺導航圖像傳感器獲取路徑信息,再傳輸到處理器中進行處理,對信息圖像進行二值化,根據小車與目標的位置,求得相對位置的偏移角度,并傳送給車體。車體再將接收到的圖像信息與陀螺儀獲取的數據相結合,控制轉向;速度傳感器獲取實時速度,采用增量式PID實現對電機的閉環控制,最終實現一套自主路徑規劃導航控制系統[1]。
1 系統設計方案
整個系統主要由圖像采集平臺和智能車平臺兩個部分組成。圖像采集平臺主要實現攝像頭數據的采集、處理和無線傳輸系統,智能車平臺主要有K60單片機最小系統、避障模塊、電機驅動模塊、無線傳輸模塊、陀螺儀模塊等組成。總體設計結構框如圖1所示。
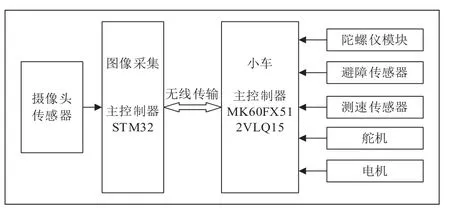
圖1 系統設計方案
2 系統硬件設計
2.1 圖像采集處理器
圖像采集主控芯片采用STM32F767。其體積小,性能穩定,具有ARM32位Cortex-M7高性能CPU,工作頻率高達216MHZ,內嵌1024KB的高速FLASH閃存程序存儲容量。具有睡眠、待機和關機三種模式使其具備較低的功耗;芯片有2個數模轉換器,多達132個快速I/O端口且所有端口均支持5V信號,同時具備兩個支持SMBus/PMBus的I2C接口、8個USART接口、6個18M位/秒的SPI接口、CAN接口和MicroUSB接口。核心板內部資源豐富,各模塊相對獨立[2]。將攝像頭采集來的圖像數據,通過NRF24L01無線傳感模塊傳輸給地面的智能車。
2.2 紅外攝像頭MT9V032
圖像采集對小車導航避障系統工作的穩定性和高效性起著重要的影響。設計過程中綜合對比后采用了紅外廣角攝像頭MT9V032。MT9V032具有感光面積大、高動態性能、自動曝光、幀率可調等諸多優點。
紅外攝像頭主要通過檢測智能車車身前后安裝的兩個大小不同的紅外圓形標記點來確定小車的坐標和車身角度信息。為此攝像頭加裝了850nm紅外窄帶濾光片,既能夠減少自然光的干擾減小誤判,又能更正廣角鏡頭產生的畸變,保證圖像畫面的清晰度。攝像頭排除其他光線的干擾只采集信標發射出的紅光與紅外光,增強了攝像頭識別系統的抗干擾性和魯棒性。
2.3 智能車核心處理器
MK60FX512VLQ15是智能車的主控芯片,該芯片是王者系列K60FX核心板,內核為ARM-CORTEX-M4,主頻150MHz,1M的FLASH,128K的SRAM,內置高分辨率的高速16位模擬轉換器ADC和2個12位數模轉換器DAC。16個DMA通道,用于外設和寄存器,實現數據的快速吞吐。此外MK60FX512VLQ15還具有豐富的模擬外設,包括3個SPI模塊,2個I2C,UART,CAN總線,USB接口等。
智能車平臺主要由主控制器和驅動電路組成。主板具有信號采集、處理和電機控制單元。同時,為了減少電機驅動電路的干擾,將控制部分和電機驅動分開。車身整體硬件包括超聲波紅外測距模塊、角度傳感器、速度傳感器、NRF24L01無線通信模塊等。通過測距傳感器對車體周圍信息進行檢測,獲取路況中障礙物的距離信息,確保避障系統的穩定運行,車身頭部和尾部還配備了兩塊圓形紅外LED燈盤,一大一小供紅外攝像頭檢測,通過測算兩紅外的坐標并進行大小比較和兩坐標的斜角計算,就能確定車模的整體位置和角度信息,最終在各個模塊的配合下實現了一套能夠識別信標位置自主路徑規劃,并且可以實時輸出車體狀態的智能車導航控制系統。
3 系統軟件設計
智能車導航系統設計主要分圖像識別系統和智能車控制系統,首先智能車先通過攝像頭采集路面信息進行坐標計算,圖像采集時可能會出現邊緣雜點、邊緣線,遠景圖像模糊、變形等問題,造成圖片信息不真實,這就需要利用Matlab來校正圖像,圖像校正后在確定采集到三個發光源后,計算出偏移角,再將采集分析后的數據發送給智能車。智能車控制系統根據接收到的數據后執行相應的操作,例如前后車燈的亮滅控制、舵機打角計算及電機的正反轉。系統整體軟件設計流程如圖2所示。
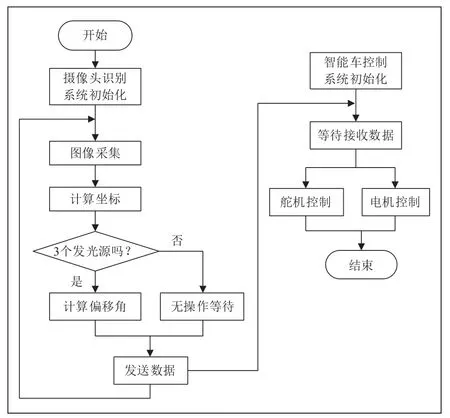
圖2 整體設計流程圖
3.1 圖像采集與校正
攝像頭在拍攝圖像時,由于鏡頭的特點(凸透鏡會聚光、凹透鏡發散光),其成像過程是對真實鏡像的一種透視失真,智能車采用的是170°廣角攝像頭,圖像產生的桶形失真相對嚴重,沿著鏡頭半徑方向向邊緣移動畸變會越來越嚴重。本設計利用棋盤式方格進行測量,創建函數矯正桶形畸變還原真實賽道信息。筒體變形的數學模型參考公式(1)。

原始圖像是一個二維數據矩陣,每個元素對應一個像素,計算量較大,可以利用Matlab仿真生成桶形畸變校正表,主控芯片只要查表找點即可。
3.2 目標識別
攝像頭采集到圖像后,圖像采集平臺對變換后的圖像按行跳躍式掃描,只掃描原始圖像的一半像素點,縮短掃描時間,基本思想如下:
(1)根據設定的閾值提取黑白跳躍點,按照掃描出連續目標區域的個數,記錄每個區域的長度和中心點坐標;
(2)利用賽道的連續性,根據上一行白塊中心的位置來確定本行的白塊與上一行白塊區域是否為同一區域,如果是便累加長度作為白塊面積,不是便建立新的白塊區域;
(3)整幅圖像掃描完成后對前三個白塊區域的各行中點求平均值,采集到的白塊區域超過三個便識別錯誤舍去;
(4)比較三個白塊的像素面積并重新排序,連同識別的目標數量按從小到大的順序一起發給小車;
(5)智能車根據白塊大小來確定信標、車頭與頭尾,其中面積最小的為車尾,再拿車尾的燈與另外兩個燈的距離作比較,較遠的為信標,較近的便是車頭。
3.3 路徑規劃
目標識別后小車需要以最快的速度準確的到達目的地,這就需要對路徑進行優化,路徑優化主要考慮以下三個方面:
(1)增加小車視場的長度和寬度
當采集到的圖像略大于整個賽道時,攝像頭采集到的目標畸變較小,此時小車會選擇一個較好的路徑快速滅掉信標且不出攝像頭視野;相反,如果視場無法覆蓋整個賽道,小車很容易沖出賽道檢測不到信標位置。雖然增大視場可以減少失真但提高了分辨率的要求,所以本設計采用STM32F767主控制器,其自帶攝像頭接口,方便操作。為了增加視場的寬度和每行采集的圖像點數,攝像頭使用廣角鏡頭來有效地增加視場的寬度。既滿足圖像采集的要求,又增加了單片機處理的圖像行數,最終處理行數為240行。
(2)相對角度處理
圖像采集平臺將采集到的坐標信息按從小到大進行排序,并將其與檢測到目標數量一同發給小車,小車在接收到數據后會比較最小的信標與另外兩個信標的距離,通過距離大小來區別信標燈和車頭。最后分別算出車尾與車頭,車尾與信標燈相對圖像的角度,兩個角度相減便得到小車與信標燈的角度差。
(3)切向滅燈與避障
行駛過程中小車速度較快,為了避免小車撞上信標,在足夠靠近信標時,讓小車與信標形成一個切向角度沖過去。外界光線結合賽道地面材料的反光容易對攝像頭造成干擾,影響采集數據的準確性,容易造成碰撞因此車前裝有三個超聲波模塊和兩個GP2Y0A21YK0F 紅外測距傳感器,再通過模數轉換將數據發送給小車,可能的排除干擾。
4 測試
為了驗證該智能車導航系統定位的效果,在室內選擇了一塊較為空曠的場地,并在空地上方安裝了圖像采集平臺,地面鋪設了可發射紅外光的信標供攝像頭識別,信標鋪設的位置預先經過測量,布設在鏡頭邊緣等畸變嚴重、識別難度較高的區域,并在鏡頭視野內擺放了一些雜物干擾智能車的行駛路徑。
實驗表明,小車會根據傳輸過來的圖像信息對亮著的信標燈進行目標識別并且規劃路徑,向著目標燈行駛過去。同時根據路面以及環境信息,電機會根據控制算法自動調整速度。在第一盞燈被滅掉之后,在下一盞燈與現處的位置之間放置隨意一物體當作障礙,小車會自動完成避障功能并且駛向下一個目標區。
5 小結
本文從總體硬件結構和系統軟件設計兩方面分析了智能車輛的視覺定位與導航技術。將視覺傳感器與車身分離出來,使之視角更為廣闊,對于控制地面車輛的行駛具有更高的前瞻性。該系統設計可以讓智能車在GPS覆蓋不到的區域能夠感應并靠近遠距離終點目標。由于攝像頭感應處理的是紅光與紅外光,對于外界自然光具有極強的抗干擾性,能夠適應不同的工作場合,相比傳統的導航方式,本設計在路徑規劃、障礙躲避、功能拓展方面具有較大優勢,具有一定的創新與研究意義。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44