自動化技術在汽車機械控制算法模型的仿真研究
2021-06-24 07:24:48齊飛
微型電腦應用 2021年6期
齊飛
(煙臺汽車工程職業學院 機電工程系, 山東 煙臺 265500)
0 引言
近年來自動化技術發展迅速,在日常生活和生產中受到了廣泛的關注和推廣,應用的范圍和領域也在不斷地擴大。在汽車機械控制系統中也有自動化技術的應用,用以保證系統運行的穩定,并大幅提高了控制系統的智能化水平以及運行效率。汽車已成為日常出行不可或缺的交通工具,人們更為關注的是日常駕駛的便利性、經濟性、安全性等綜合體驗。集成化線控底盤技術是解決這一需求的有效方法,本文設計的電控機械制動系統(EMB) 作為機電一體化制動裝置,結構更為簡單,在節能環保、響應速度等方面都體現出了優勢。該系統通過滑模控制理論,使用邊界層方法來控制顫振現象,以遺傳算法為依據對PID控制參數進行優化,彌補傳統PID 控制中整定參數上存在的不足,利用地面附著力來實現縮短制動距離的要求,非常有效地提高了目標滑移率的跟蹤效果,從而提升制動效能以及穩定性。
1 自動化技術在汽車機械控制中的應用分析
隨著電動汽車及電機控制技術的發展,機電裝置不斷完善,電控機械制動系統可以通過電機有效實現驅動、轉向及制動等過程,通過制動力矩來控制車輪制動,從而滿足電子制動力分配、制動防抱死等多種控制目標。因此,通過自動化技術的應用使汽車在環保及安全方面具備極大的發展優勢。
防抱死制動是電控機械制動過程的重要控制目標,隨著動力學建模以及控制策略等相關技術的深入研究,防抱死制動控制算法已經取得了一定的研究成果。例如,通過大量試驗尋求 PID參數,并通過制動力評價方法找出影響制動力控制效果的規律,同時分析控制參數的影響情況、通過神經網絡實現電機防抱死制動響應、通過模糊控制理論和滑移率的防抱死制動控制方法提高跟蹤性能等等[1]。自動化技術在汽車機械控制系統中的應用顯著提高了機械控制的效率和準確性。通過向各部門發送指令及數據傳輸,根據循環和應用過程中的信息及時處理計算機運行中產生的錯誤,從而減少信息收發時間,實現信息的有效循環。目前自動化技術在汽車中的應用主要包括以下幾點。
(1) 實時檢測運行數據
針對行駛過程中的汽車,可通過自動化系統收集運行中產生的相關數據,與汽車系統及設備的相關參數進行對比,在對比結果出現差距較大的時候發出警告,對車輛異常狀態進行自動判斷,為后續采取哪種有效措施提供理論支撐。
(2) 實施安全權限機制
機械自動化技術能夠顯著提高汽車駕駛的安全性,通過操作符與密碼一一對應的方式設置權限,不同駕駛員所設置的等級不同,對應的操作權限也不同。通過設置不同安全級別的方式,搭建車輛控制系統安全操作結構,便于技術人員及時發現不同程度的安全問題,并以此為據采取有針對性的措施。另外,嚴格控制信息檢查過程,非技術人員沒有查看與反饋信息的權限,確保信息的安全性和嚴密性[2]。
(3) 故障診斷和排除
自動化技術可為汽車機械控制系統提供高度集成的控制技術和手段,在確保生產質量與效率的同時降低汽車機械控制系統的生產成本和使用成本。自動化技術應用于汽車機械控制方面主要表現為基于計算機網絡技術來模擬汽車的行駛過程,在出現故障后及時報警,并可以通過自動算法預先判定一些難以發現的故障,有效避免繼續運行帶來的損失。
(4) 完善自動化配電模式
在汽車機械控制系統中,遵循可靠性和適用性原則對功率進行分配,可顯著提升汽車行駛過程中的穩定性,最大程度降低事故發生的概率。實際設計配電時首先要考慮對汽車機械負荷的要求,參照車輛相關標準對功率進行設計和分配,通過靜態補償法完成對小負荷配電線路優化,通過動態補償法完成重載條件下的配電線路優化,使系統在完全供電時能夠對電力線補償方法進行自動合理的選擇,從而降低汽車電網系統的功率負荷及損耗。其次,在汽車控制系統中設計配電線路時,需依據線路分布的不同負載,從經濟角度完成對應材料及補償形式的選擇,既保證安全性和可靠性,又在補償電路的同時節約能源[3]。
2 車輛制動過程仿真
汽車電控機械制動系統主要包括制動器、控制器 ECU、電機及傳動裝置等。在車輛制動時,駕駛員通過安裝在電子制動踏板上的踏板位移傳感器檢測位移并輸入到ECU,根據踏板位移和速度識別駕駛員制動意圖是普通制動還是緊急制動,由ECU 分析各車輪及制動塊(包括輪速傳感器和制動力傳感器)等的信號,并通過預存的控制算法獲取電機電壓控制信號,再通過行星齒輪減速器及滾動絲杠機構對制動執行電機的力矩進行減速增扭和轉換,完成旋轉運動到移動的轉換過程,實現制動塊的壓緊,最終將傳感器信號通過FlexRay 總線返回給ECU, ECU發出相應控制信號,完成對各車輪主動制動力的控制過程。
2.1 車輛制動動力學模型
本文的整車制動模型采用了基于SIMULINK 建立的1/4車輛模型,如圖1所示。

圖1 1/4 制動模型
控制過程的輪胎模型基于 Burckhardt,可以看出,在制動時所用到的表征中,輪胎滑移率同路面縱向附著系數存在明顯的關系。分別以輪胎滑移率和路面附著系數作為輸入和輸出,根據車速以及輪速計算滑移率后,再通過SIMULINK 的查表模塊在輪胎模型中查詢相應路面縱向附著系數。
滑移率在干路面、濕路面、冰雪路面等不同路況下與地面上的縱向附著系數間的具體關系,如圖2 所示。
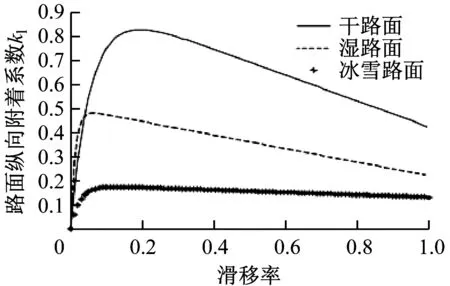
圖2 滑移率同地面縱向附著系數間的關系
對應的峰值附著系數為 0.82、0.45、0.18,最佳滑移率為0.2、0.08、0.15。在電控機械制動系統中,以電機力矩及車輪制動力矩作為動力學模型的輸入和輸出,使用 PID 控制時,則是以實際滑移率與最佳值之間的差值、電機期望力矩值作為輸入和輸出[4-5]。
3 電控機械制動系統控制過程的實現
本文通過使用MATLAB自帶的圖形用戶界面開發環境(GUI)來完成對控制策略的仿真分析過程,提升人機交互界面的友好性,用戶只需輸入對應的整車及輪胎模型參數,點擊選擇對應控制算法按鈕即可直觀快速地完成分析過程。
3.1 PID 控制模型
本文采用的PID 控制過程以滑移率為依據,基于上述車輛制動模型構建 PID 控制子系統模型,如圖3所示。

圖3 PID 控制的子系統模型
車輛制動模型向PID 控制子系統反饋獲取的實際滑移率,然后PID控制子系統向車輛制動模型輸入制動力矩信號(通過 PID控制算法的使用完成制動力矩信號的輸出),從而完成對理想滑移率的有效跟蹤過程。
針對PID 控制子系統,本文使用SIMULINK構建PID 控制算法模型,如圖4所示。
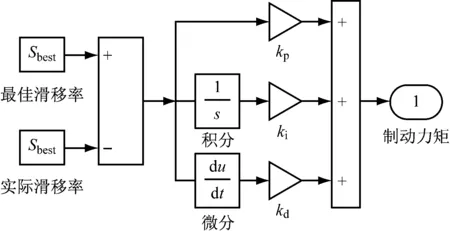
圖4 PID 控制算法模型
在制動過程中,需要預先對干路面、濕路面及冰雪路面的理想滑移率數值進行預設,例如分別預設為:0.2、0.08、0.15,再與各個時刻計算獲取的實際滑移率相減,通過對差值進行按比例、積分、微分等相關運算,最終獲取電機力矩的數值,最終通過調節制動器的制動力矩,使制動效能得以顯著提升,從而完成防抱死控制過程[6]。
3.2 PID 控制參數對制動性能的影響
車輛以80 km/h的初始車速在干路面上制動時,制動性能受到不同的比例、積分及微分系數的影響情況的仿真結果,如圖5—圖7所示。
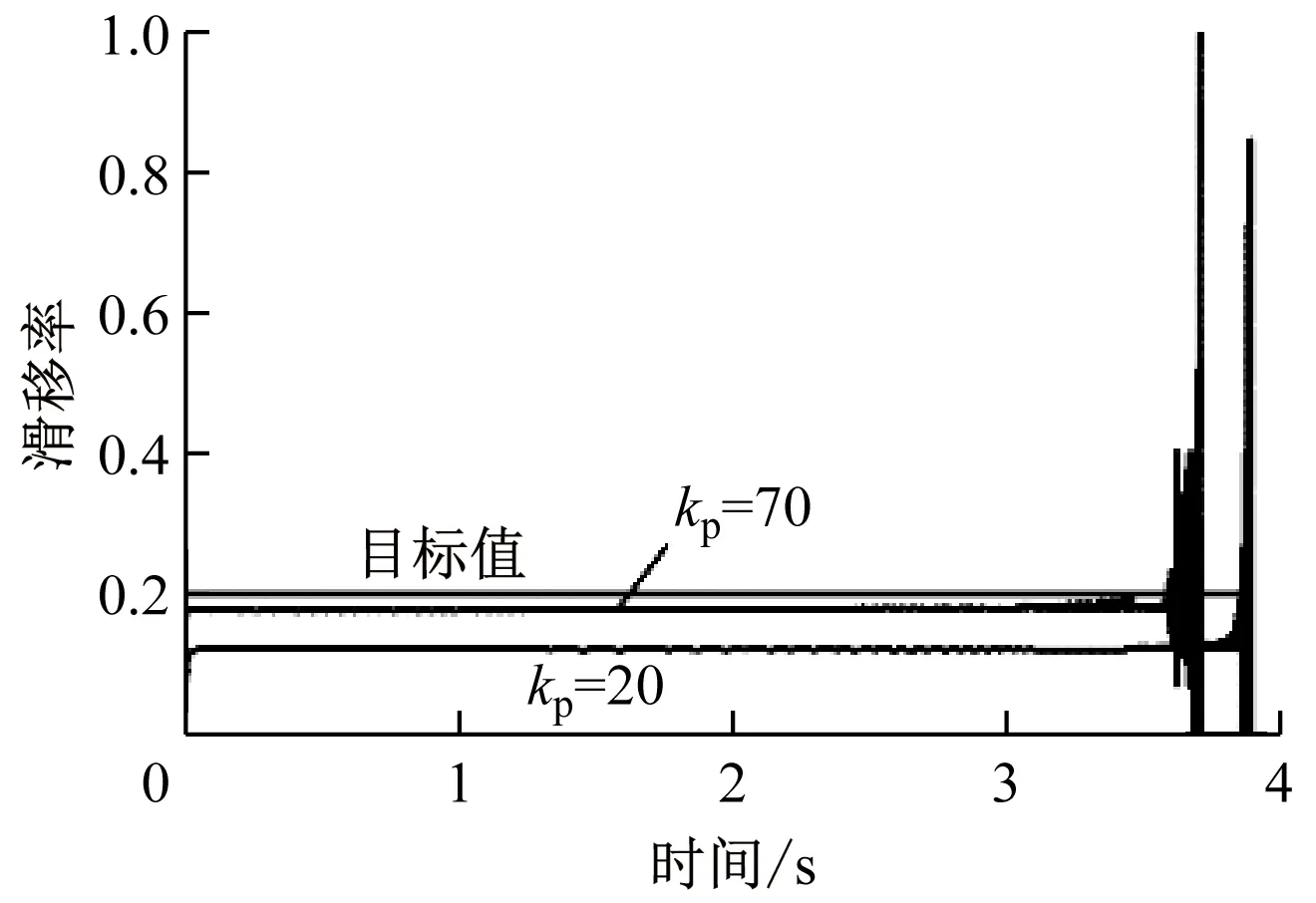
圖5 不同比例系數的影響
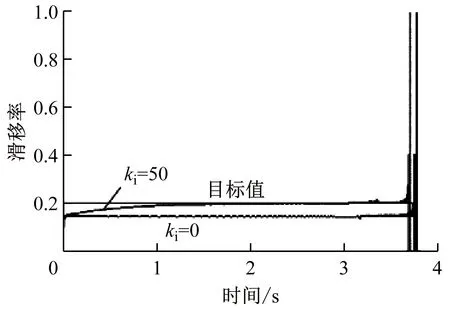
圖6 不同積分系數的影響
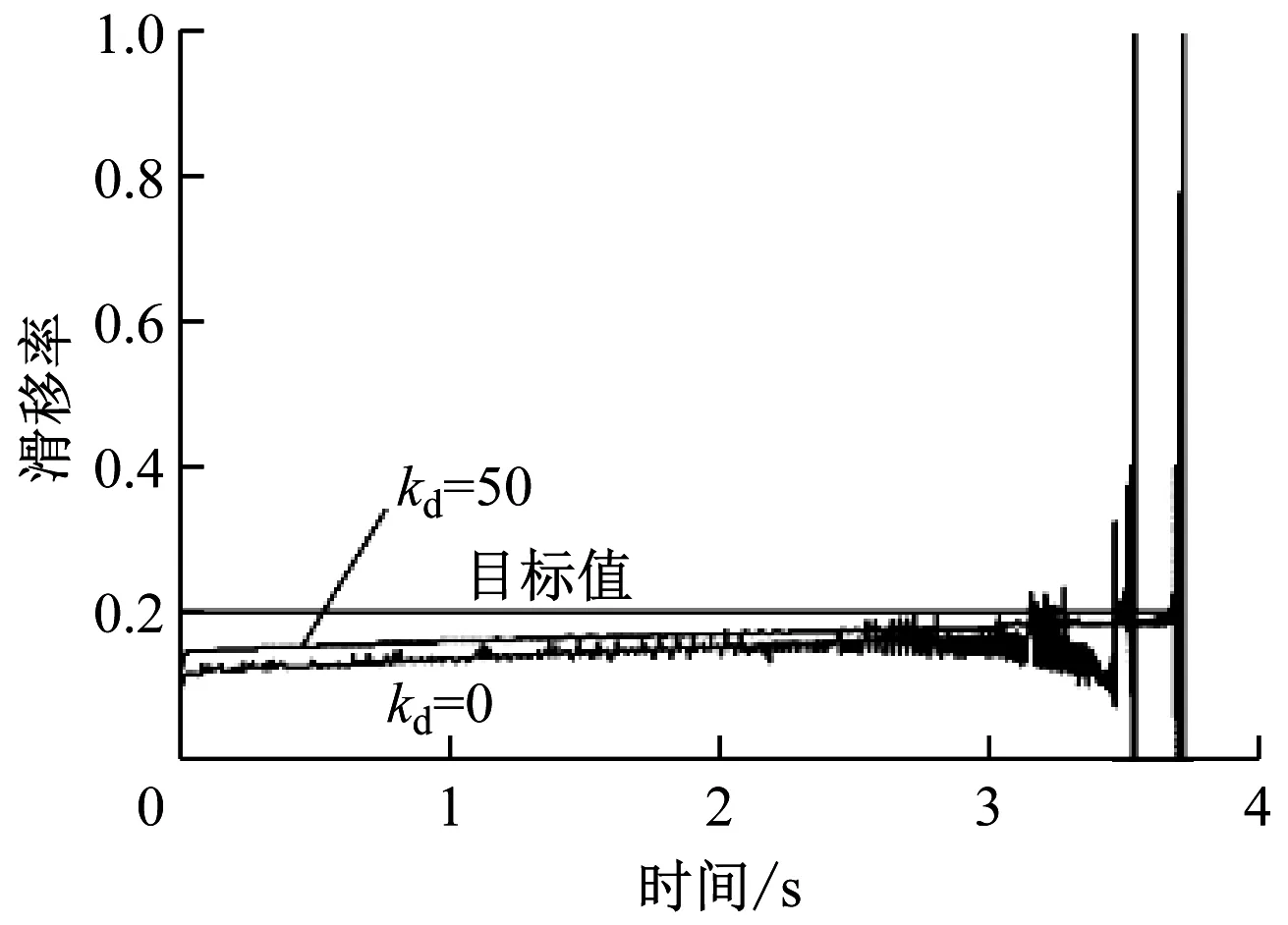
圖7 不同微分系數的影響
由圖5—圖7可知,在比例系數取值不同的情況下,將滑移率變化過程與目標值進行對比,得到以下結果。
(1) 滑移率跟蹤響應速度與比例系數(由kp表示)成正比,穩態誤差減小。在比例系數超過一定范圍之后振動加劇,系統易表現出不穩定性。
(2) 滑移率跟蹤響應速度與積分系數增成正比,穩態誤差呈減小趨勢,積分系數(由ki表示)超過一定范圍后振動加劇,系統易表現出不穩定性。
(3) 滑移率跟蹤響應速度與微分系數(由kd表示)成正比,穩態誤差變小,當微分系數超過一定范圍后系統抗干擾能力呈下降趨勢[7]。
3.3 優化 PID 控制參數
遺傳算法作為一種隨機優化搜索算法,適用于求解復雜系統的優化問題,可同時對空間的多個點進行高效搜索,并且可以快速全局收斂。本文使用遺傳算法對PID 控制參數進行優化。第一步,建立針對優化問題的數學模型,以kp、ki、kd作為 PID 控制參數的優化變量,將車輛穩定性條件作為約束條件。第二步,在路面上的制動過程中,將實際滑移率與理想滑移率相減,再以差值的均方根作為目標函數,然后通過位于MATLAB優化工具箱中的遺傳算法調用算法優化程序進行求解。第三步,編寫目標函數及主程序的M文件,并結合實際所需的判斷終止條件,最終獲取PID 控制參數優化結果[8]。
經過優化后的 PID控制參數在不同路面上的控制效果
的實驗仿真結果為:在干路面(ki值為4)、濕路面及冰雪路面上的kp值分別為148.6、56.7、14.2,制動距離分別為30.5 m、52.5 m、144.9 m,制動時間分別為2.7 s、4.7 s、13 s。實際結果證明了基于該算法可以在不同路面上完成對目標滑移率較好的自動跟蹤過程,在有效縮短了制動距離的同時也大幅提高了制動效能。
4 總結
本文基于車輛制動模型構建 PID 控制子系統模型,使用遺傳算法對PID 控制參數進行優化,通過汽車機械控制系統完成了對控制策略模型的設計與仿真分析過程。由于制動性能受到不同的比例、積分及微分系數的影響,因此該模型在以理想輪胎滑移率跟蹤為依據的基礎上,還驗證了PID控制參數對制動性能的影響程度。最終結果表明:基于遺傳算法的機械控制系統可以有效提升目標滑移率的自動跟蹤效果,并且充分利用地面附著力縮短制動距離,可有效滿足制動防抱死的控制需求,顯著提升控制過程的效率以及自動化水平。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代工人(2020年8期)2020-05-25 09:07:38
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
作文大王·低年級(2016年4期)2016-04-18 00:24:37
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
