直升機(jī)關(guān)鍵技術(shù)及未來(lái)發(fā)展與設(shè)想
2021-06-24 10:22:58吳希明牟曉偉
空氣動(dòng)力學(xué)學(xué)報(bào) 2021年3期
吳希明,牟曉偉
(中國(guó)航空研究院,北京 100129)
0 引 言
直升機(jī)作為特殊的航空飛行器,具有垂直起降、空中懸停、前后左右飛行、超低空貼地飛行等特殊能力。這些特點(diǎn)和能力是固定翼飛機(jī)和其他交通工具所不能替代的,也決定了直升機(jī)在維護(hù)國(guó)家安全、國(guó)民經(jīng)濟(jì)建設(shè)、社會(huì)發(fā)展中具有重要的戰(zhàn)略地位。
自1942年直升機(jī)首次裝備以來(lái),全世界累計(jì)交付直升機(jī)約10萬(wàn)架,目前仍在使用的約5萬(wàn)架[1-2]。直升機(jī)作為現(xiàn)代軍事裝備發(fā)展的重要方向,執(zhí)行了大量武裝攻擊、機(jī)動(dòng)運(yùn)輸、搜潛反潛、偵查指揮和特種作戰(zhàn)等任務(wù),在世界各次局部戰(zhàn)爭(zhēng)中發(fā)揮了重要作用。民用方面,直升機(jī)在應(yīng)急救援、護(hù)林防火、反恐緝私等維護(hù)社會(huì)安定和經(jīng)濟(jì)穩(wěn)定的各個(gè)方面發(fā)揮著重要作用。由于直升機(jī)的特殊功能和軍民兩用的廣泛性,直升機(jī)產(chǎn)業(yè)已經(jīng)成為事關(guān)國(guó)家安全、經(jīng)濟(jì)發(fā)展、社會(huì)進(jìn)步的戰(zhàn)略性產(chǎn)業(yè)。
不同于固定翼飛機(jī)前飛時(shí)機(jī)翼產(chǎn)生升力,直升機(jī)通過(guò)槳葉旋轉(zhuǎn)產(chǎn)生升力,利用槳葉攻角改變引起旋翼升力變化來(lái)實(shí)現(xiàn)垂直升降,通過(guò)槳盤(pán)傾斜來(lái)實(shí)現(xiàn)前后左右飛行,利用尾槳推力變化來(lái)實(shí)現(xiàn)與旋翼的扭矩配平并控制航向,各種飛行操縱存在著高度的耦合。
除了特有的旋翼和傳動(dòng)系統(tǒng),直升機(jī)其他組成與飛機(jī)類(lèi)似,并有獨(dú)特的抗撞擊、耐墜毀和防砂等要求,研發(fā)過(guò)程中需要進(jìn)行大量的試驗(yàn),是典型的多學(xué)科、多領(lǐng)域高度融合的復(fù)雜系統(tǒng)工程。
我國(guó)直升機(jī)事業(yè)起步于1956年蘇聯(lián)米4直升機(jī)生產(chǎn)線的引進(jìn),先后經(jīng)歷過(guò)20世紀(jì)80年代的直9生產(chǎn)線引進(jìn)、直8測(cè)繪仿制、直11參考設(shè)計(jì),以及各個(gè)機(jī)型的加裝改型。自20世紀(jì)90年代開(kāi)始,在關(guān)鍵系統(tǒng)國(guó)際合作支持下,以直10直升機(jī)為抓手,開(kāi)啟了我國(guó)直升機(jī)的自主研發(fā)和產(chǎn)業(yè)體系建設(shè),目前已形成12個(gè)機(jī)型約60個(gè)改型的產(chǎn)品系列[3]。
1 直升機(jī)關(guān)鍵技術(shù)
直升機(jī)飛行原理特殊,其復(fù)雜的氣動(dòng)設(shè)計(jì)、結(jié)構(gòu)動(dòng)力學(xué)、極致重量設(shè)計(jì)等是直升機(jī)設(shè)計(jì)的難點(diǎn)。
1.1 高精度氣動(dòng)分析
飛行中的直升機(jī)旋翼和機(jī)身持續(xù)處于高度動(dòng)態(tài)的氣動(dòng)環(huán)境中,旋翼流速跨度大,可壓與不可壓流動(dòng)并存,前行槳葉處于跨聲速區(qū)域,槳尖產(chǎn)生激波,后行槳葉出現(xiàn)氣流分離與動(dòng)態(tài)失速現(xiàn)象,并且槳葉脫體渦、尾隨渦、槳尖渦等螺旋尾跡復(fù)雜,旋翼流場(chǎng)存在強(qiáng)烈的槳渦干擾現(xiàn)象[4]。因此常規(guī)氣動(dòng)分析和設(shè)計(jì)方法僅能定性指導(dǎo)研究工作,需要進(jìn)行大量的試驗(yàn)和試飛以完善和確定產(chǎn)品設(shè)計(jì)。隨著計(jì)算機(jī)技術(shù)的進(jìn)步,用于直升機(jī)空氣動(dòng)力學(xué)計(jì)算的CFD軟件技術(shù)突飛猛進(jìn),網(wǎng)格技術(shù)出現(xiàn)了結(jié)構(gòu)化網(wǎng)格、非結(jié)構(gòu)化網(wǎng)格、笛卡爾網(wǎng)格、蠅網(wǎng)格等[5],并且從單一網(wǎng)格到并行重疊網(wǎng)格、嵌套網(wǎng)格、多網(wǎng)格、自適應(yīng)網(wǎng)格,甚至多個(gè)異構(gòu)求解器耦合,同時(shí)在算法上,采用自由尾跡模型、渦量輸運(yùn)模型等效率更高更精確的模型[6]。這些技術(shù)極大地提高了求解精度,并降低了能量耗散。圖1為直升機(jī)旋翼氣動(dòng)仿真結(jié)果。
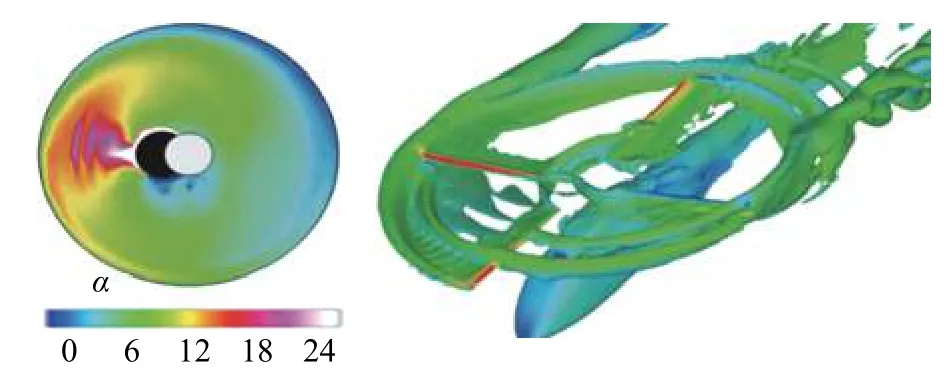
圖1 直升機(jī)旋翼氣動(dòng)仿真Fig. 1 An aerodynamic simulation of a helicopter rotor
1.2 振動(dòng)與噪聲
在世界直升機(jī)界有“振動(dòng)是直升機(jī)的永恒課題”的說(shuō)法。直升機(jī)振動(dòng)水平也是公認(rèn)的直升機(jī)先進(jìn)性標(biāo)志之一。直升機(jī)振動(dòng)主要來(lái)源于旋翼、尾槳、發(fā)動(dòng)機(jī)、傳動(dòng)系統(tǒng)以及旋翼尾跡干擾和武器發(fā)射等,主要表現(xiàn)為寬帶隨機(jī)振動(dòng)背景疊加多個(gè)定頻正弦振動(dòng)。為承受復(fù)雜動(dòng)態(tài)氣動(dòng)力和動(dòng)力學(xué)載荷,直升機(jī)槳葉必須具有一定的變形和運(yùn)動(dòng)特性,槳葉的各階、各向固有頻率應(yīng)避開(kāi)旋翼工作頻率,以免發(fā)生共振。此外,考慮到直升機(jī)傳動(dòng)系統(tǒng)和發(fā)動(dòng)機(jī)轉(zhuǎn)動(dòng)部件繁多,直升機(jī)結(jié)構(gòu)和各系統(tǒng)動(dòng)力學(xué)特性應(yīng)充分避開(kāi)運(yùn)動(dòng)部件及控制系統(tǒng)的各階固有激勵(lì)頻率[7-9]。武裝直升機(jī)武器發(fā)射是直升機(jī)振動(dòng)源之一。如其機(jī)翼上可配掛多枚導(dǎo)彈和火箭彈,各種發(fā)射狀態(tài)下機(jī)彈尾焰相容和機(jī)翼動(dòng)力學(xué)多狀態(tài)兼顧技術(shù)難度很大,特別是武裝直升機(jī)機(jī)頭航炮,其頭盔控制范圍大,相對(duì)機(jī)身做變角度運(yùn)動(dòng)射擊,機(jī)頭彈箱炮彈不同消耗狀態(tài)和執(zhí)行不同方位攻擊時(shí),射擊頻率和機(jī)身結(jié)構(gòu)與系統(tǒng)共振是直升機(jī)關(guān)鍵技術(shù)之一。
直升機(jī)的噪聲主要來(lái)自于旋翼、尾槳和發(fā)動(dòng)機(jī)。由于直升機(jī)前飛時(shí)旋翼槳盤(pán)基本平行于大氣來(lái)流,高速旋轉(zhuǎn)的槳葉持續(xù)處于槳盤(pán)非定常尾流之中,氣動(dòng)環(huán)境復(fù)雜多變,導(dǎo)致直升機(jī)噪聲環(huán)境嚴(yán)酷并且改善難度較大。目前常規(guī)直升機(jī)艙內(nèi)噪聲在100 dB左右,50 m處噪聲在120 dB左右[8-9]。圖2為直升機(jī)噪聲源。
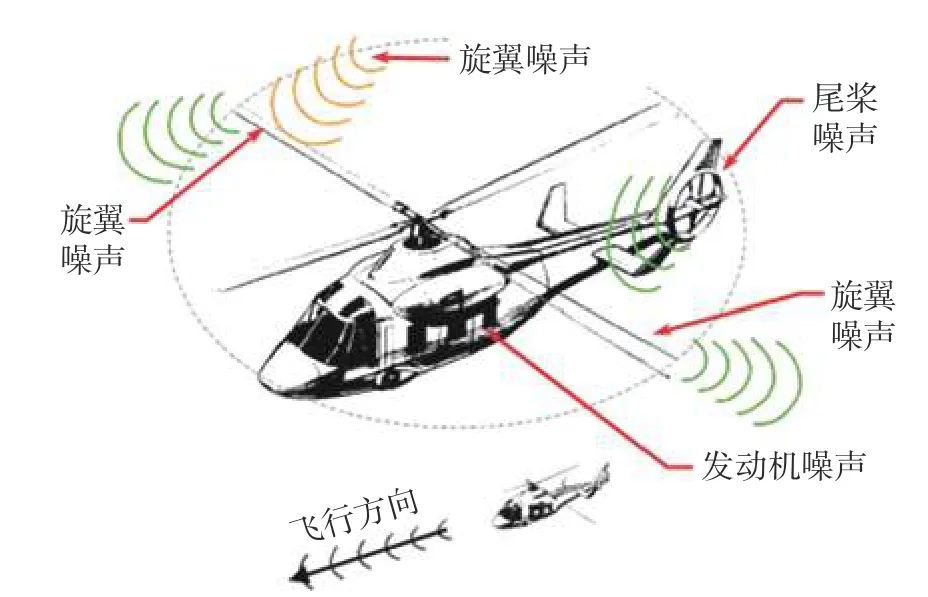
圖2 直升機(jī)噪聲源Fig. 2 A sketch of the helicopter noise source
隨著直升機(jī)減振技術(shù)的發(fā)展和主動(dòng)控制技術(shù)的成熟,直升機(jī)振動(dòng)水平已經(jīng)下降到0.05g。其中旋翼系統(tǒng)的振動(dòng)主動(dòng)控制、結(jié)構(gòu)振動(dòng)主動(dòng)控制技術(shù)、先進(jìn)的槳葉間阻尼器以及主減阻尼器等,這些技術(shù)在很大程度上都對(duì)直升機(jī)減振降噪做出了貢獻(xiàn)[10]。尤其是變形旋翼、主動(dòng)控制襟翼、主動(dòng)扭轉(zhuǎn)旋翼等智能旋翼技術(shù)的發(fā)展,為從根本上解決直升機(jī)振動(dòng)和噪聲問(wèn)題帶來(lái)了希望。基于CFD/CSD建立的智能旋翼高精度氣動(dòng)、噪聲、振動(dòng)載荷預(yù)測(cè)方法,為理論分析提供了有效的手段。研究發(fā)現(xiàn),高階諧波控制(HHC)技術(shù)和單片槳葉控制(IBC)技術(shù)能夠有效降低振動(dòng)載荷水平60%~90%,同時(shí)降噪8~12 dB;主動(dòng)副翼控制(AFC)可減小由槳尖渦引起的振動(dòng)70%~90%,同時(shí)降噪6~10 dB[11]。
1.3 地面共振/空中共振
直升機(jī)構(gòu)型可以簡(jiǎn)單地看作以旋翼槳轂中心連接的兩個(gè)振動(dòng)系統(tǒng)。異常激勵(lì)后導(dǎo)致的地面共振和空中共振是世界直升機(jī)多發(fā)事故原因之一。
直升機(jī)槳葉擺振會(huì)導(dǎo)致整個(gè)旋翼的重心發(fā)生變化,旋翼重心繞旋轉(zhuǎn)中心的轉(zhuǎn)速與旋翼轉(zhuǎn)速不一致,當(dāng)其轉(zhuǎn)速小于旋翼轉(zhuǎn)速時(shí),形成擺振后退型振動(dòng)。當(dāng)這種擺振后退型振動(dòng)與機(jī)體模態(tài)耦合,存在發(fā)生地面共振的可能[12]。而隨著無(wú)鉸旋翼的應(yīng)用,由槳轂力矩引起的機(jī)身振動(dòng)頻率若接近槳葉擺振頻率,則可能引起空中共振。空中共振需要考慮的因素很多,包括槳葉揮舞、擺振、機(jī)體運(yùn)動(dòng)、空氣動(dòng)力等多種因素,是復(fù)雜的直升機(jī)動(dòng)力學(xué)問(wèn)題。隨著直升機(jī)振動(dòng)主動(dòng)控制技術(shù)的發(fā)展,地面共振和空中共振主動(dòng)控制技術(shù)應(yīng)運(yùn)而生。通過(guò)槳葉的高階槳距控制來(lái)改變擺振平面內(nèi)的氣動(dòng)阻力和慣性力,或是通過(guò)控制槳葉揮舞運(yùn)動(dòng)來(lái)控制槳轂力矩來(lái)控制機(jī)身,是地面共振和空中共振主動(dòng)控制技術(shù)的主要發(fā)展方向。RAH-66直升機(jī)就采用主動(dòng)槳距控制技術(shù)來(lái)增加旋翼與機(jī)身的耦合阻尼,從而抑制空中共振的發(fā)生[13]。圖3為直升機(jī)揮舞振動(dòng)分析結(jié)果。
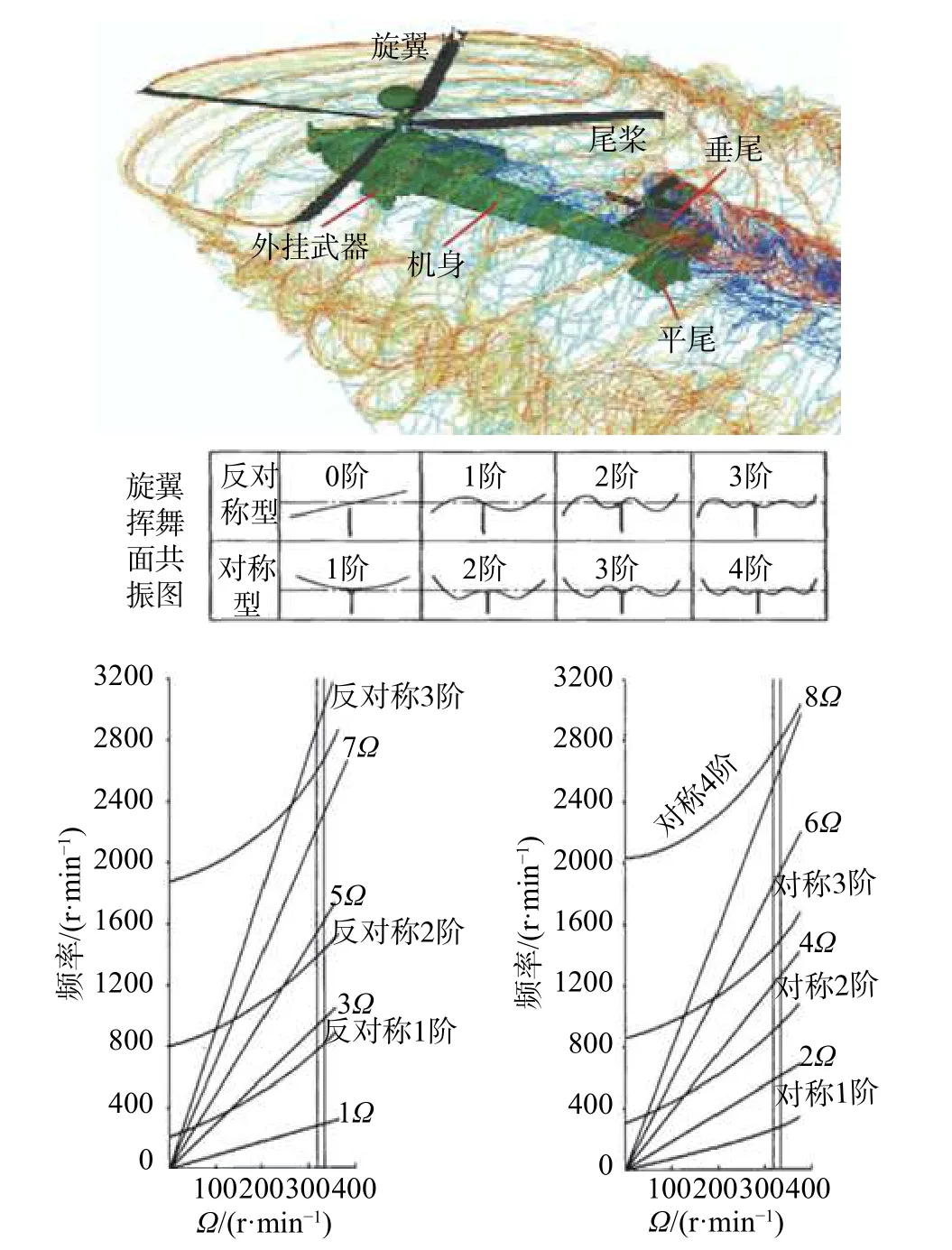
圖3 直升機(jī)振動(dòng)分析Fig. 3 A helicopter vibration analysis
隨著艦載直升機(jī)的發(fā)展,“艦面共振”問(wèn)題已經(jīng)成為直升機(jī)上艦需要面對(duì)的重要問(wèn)題之一。由于艦船的運(yùn)動(dòng)特性,艦載直升機(jī)的旋翼與機(jī)身耦合問(wèn)題相對(duì)于地面共振和空中共振更為復(fù)雜。此外,艦面起降時(shí)低速運(yùn)轉(zhuǎn)的旋翼受到的艦船空氣尾流的影響,結(jié)合艦船運(yùn)動(dòng)引起的槳葉慣性力,容易使直升機(jī)槳葉產(chǎn)生槳葉航行現(xiàn)象[14]。直升機(jī)“艦面共振”與地面共振和空中共振理論基礎(chǔ)基本一致,解決這一問(wèn)題主要從提高旋翼擺振剛度和提高阻尼兩方面入手。
1.4 抗墜毀要求
由于直升機(jī)的特殊構(gòu)型,高速旋轉(zhuǎn)的旋翼讓直升機(jī)駕駛員空中跳傘逃生實(shí)現(xiàn)難度大,因此直升機(jī)必須具備墜毀后的人員安全設(shè)計(jì)。根據(jù)世界直升機(jī)墜毀速度統(tǒng)計(jì),目前軍機(jī)民機(jī)人員墜毀生存最高要求是在垂直接地速度12.8 m/s條件下的所有墜毀情況下具有95%生存概率[15]。抗墜毀研究的主要內(nèi)容包括評(píng)估起落架系統(tǒng)及機(jī)體結(jié)構(gòu)的吸能能力。起落架變形能夠吸收部分能量,在起落架破壞的情況下,考慮機(jī)體結(jié)構(gòu)對(duì)剩余能量的吸收,需要機(jī)體結(jié)構(gòu)在綜合性能方面具有足夠的強(qiáng)度和良好的塑性變形能力,以便最大程度地吸收能量,減緩沖擊力造成的破壞[16]。現(xiàn)階段,可以通過(guò)有限元方法準(zhǔn)確預(yù)估結(jié)構(gòu)的非線性瞬態(tài)動(dòng)力學(xué)響應(yīng),以分析起落架抗墜毀設(shè)計(jì)的合理性。此外,抗墜毀座椅技術(shù)的發(fā)展可以進(jìn)一步減少直升機(jī)墜毀對(duì)人員的傷害。抗墜毀燃油系統(tǒng)可以在直升機(jī)墜毀時(shí)防止燃油泄漏起火,保證人員安全[17]。隨著大應(yīng)變彈塑性動(dòng)力學(xué)、連續(xù)損傷力學(xué)、高速?zèng)_擊動(dòng)力學(xué)、計(jì)算結(jié)構(gòu)力學(xué)、動(dòng)態(tài)斷裂力學(xué)及計(jì)算機(jī)軟件技術(shù)的發(fā)展,可以滿足直升機(jī)抗墜毀技術(shù)的研究需求。新材料和新結(jié)構(gòu)形式的出現(xiàn),增強(qiáng)了直升機(jī)抗墜毀特性,增強(qiáng)了對(duì)人員的保護(hù),讓直升機(jī)變得更加安全。圖4為世界范圍內(nèi)旋翼飛行器墜毀事故垂直速度分布結(jié)果。
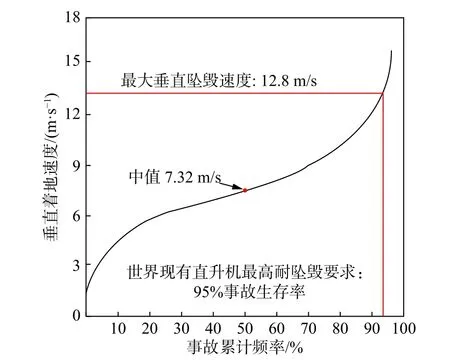
圖4 世界旋翼飛行器墜毀事故的垂直速度分布Fig. 4 The relation between the vertical velocity and the crash accumulation frequency
1.5 安全性
安全性是直升機(jī)設(shè)計(jì)工作的重中之重,是民機(jī)適航驗(yàn)證的核心要求。通過(guò)安全性分析,得到影響安全的關(guān)鍵系統(tǒng)和部件,并在設(shè)計(jì)上采取備份或冗余設(shè)計(jì),充分考慮最苛刻的使用條件并進(jìn)行試驗(yàn)驗(yàn)證,是保證達(dá)到安全性設(shè)計(jì)目標(biāo)的最有效方法。
直升機(jī)安全性設(shè)計(jì)主要包括:槳葉遭受雷擊后安全飛行0.5 h[18];傳動(dòng)系統(tǒng)失去滑油后干運(yùn)轉(zhuǎn)0.5 h[19];主電源系統(tǒng)失效后應(yīng)急供電30.5 h[20];發(fā)動(dòng)機(jī)全部停車(chē)后安全自轉(zhuǎn)著陸[21];旋翼槳葉及座艙風(fēng)擋玻璃等遭受鳥(niǎo)類(lèi)撞擊后繼續(xù)飛行[22];航電系統(tǒng)及機(jī)載設(shè)備防雷擊和防高強(qiáng)輻射場(chǎng)[23];軍機(jī)旋翼、燃油、傳動(dòng)、座椅、操縱等主要系統(tǒng)耐彈擊設(shè)計(jì)等。
1.6 重量控制
直升機(jī)因多用于低空飛行,所以對(duì)機(jī)動(dòng)性、安全性和生存性提出了更高的要求。直升機(jī)特有的旋翼、傳動(dòng)和發(fā)動(dòng)機(jī)“三大動(dòng)部件”技術(shù)復(fù)雜,研制難度大,同時(shí)考慮到振動(dòng)和噪聲特性,以及作為產(chǎn)品對(duì)安全性、可靠性和舒適性等方面的技術(shù)要求,更增加了設(shè)計(jì)難度。直升機(jī)飛行重量低于同等發(fā)動(dòng)機(jī)功率的固定翼飛機(jī),導(dǎo)致全機(jī)重量設(shè)計(jì)要求極其苛刻。直升機(jī)各系統(tǒng)同樣需要經(jīng)受內(nèi)部環(huán)境的嚴(yán)格考驗(yàn),例如:直升機(jī)航電系統(tǒng)較固定翼飛機(jī)重量輕40%左右,而其熱環(huán)境、振動(dòng)環(huán)境和電磁環(huán)境更惡劣,對(duì)系統(tǒng)及設(shè)備的性能和指標(biāo)提出了更高的要求。
重量與直升機(jī)成本有著緊密的聯(lián)系。美軍在對(duì)現(xiàn)代作戰(zhàn)飛機(jī)的成本進(jìn)行參數(shù)法估算時(shí),將成本估算關(guān)系式(CER)抽象為:生產(chǎn)成本 =f(重量,速度,產(chǎn)量)。建立各部件/系統(tǒng)的重量估算模型和成本估算模型,有利于掌握直升機(jī)生產(chǎn)成本并實(shí)行有效控制[24]。
2 世界直升機(jī)技術(shù)未來(lái)發(fā)展方向
當(dāng)前,國(guó)際直升機(jī)未來(lái)發(fā)展方向主要聚焦于高速、智能、無(wú)人、安全、環(huán)保、舒適和多元化等方向。
2.1 高安全性
安全性是直升機(jī)永恒的主題。結(jié)合現(xiàn)有安全性技術(shù)進(jìn)一步深化完善,集成直升機(jī)健康狀態(tài)監(jiān)控、使用維護(hù)、人工智能、電/光傳飛控、綜合航電等技術(shù)的研究成果[25],實(shí)現(xiàn)直升機(jī)能力提升,解決直升機(jī)“無(wú)憂”操縱與“智能”飛行等技術(shù)問(wèn)題。隨著傳感器技術(shù)的進(jìn)步和HUMS系統(tǒng)的不斷發(fā)展,直升機(jī)健康狀態(tài)監(jiān)控技術(shù)日趨成熟,其中包括直升機(jī)旋翼狀態(tài)監(jiān)測(cè)、直升機(jī)結(jié)構(gòu)健康監(jiān)測(cè)等,通過(guò)對(duì)旋翼及結(jié)構(gòu)關(guān)鍵點(diǎn)的振動(dòng)特性和力學(xué)特性的實(shí)時(shí)監(jiān)控,可以保障直升機(jī)的安全[26]。聲發(fā)射信號(hào)同步數(shù)據(jù)采集與無(wú)線傳輸技術(shù)讓實(shí)時(shí)監(jiān)控成為可能。同時(shí)伴隨著大數(shù)據(jù)技術(shù)和人工智能技術(shù)的發(fā)展,將直升機(jī)健康監(jiān)測(cè)數(shù)據(jù)上傳到特定的平臺(tái)進(jìn)行數(shù)據(jù)處理,進(jìn)而形成狀態(tài)報(bào)告,結(jié)合人工智能技術(shù),可以實(shí)現(xiàn)不同故障案例的整合與分析,從而制定更優(yōu)的解決方案[27]。同時(shí),借助電/光傳飛控、綜合航電技術(shù)的發(fā)展,通過(guò)基于機(jī)器學(xué)習(xí)的人工智能技術(shù),模仿和學(xué)習(xí)大量人類(lèi)飛行員的操作,建立起飛行數(shù)據(jù)和飛行員控制指令的數(shù)據(jù)映射,形成優(yōu)于人類(lèi)駕駛員的智能操作系統(tǒng),可以提升直升機(jī)的安全性。圖5為直升機(jī)健康監(jiān)測(cè)系統(tǒng)。
2.2 綠色低碳
當(dāng)前國(guó)際上以“綠色直升機(jī)技術(shù)”專(zhuān)項(xiàng)研究為牽引,推動(dòng)了新型旋翼、機(jī)身及槳轂減阻、振動(dòng)抑制、噪聲抑制、柴/電/混合動(dòng)力發(fā)動(dòng)機(jī)等一系列重大基礎(chǔ)技術(shù)的發(fā)展和型號(hào)應(yīng)用[28]。上述技術(shù)中,除了柴/電/混合動(dòng)力發(fā)動(dòng)機(jī)技術(shù)以外,其他幾項(xiàng)技術(shù)是通過(guò)減小阻力、降低振動(dòng)來(lái)減小需用功率,從而減小發(fā)動(dòng)機(jī)功率達(dá)到節(jié)能減排的目的,同時(shí)也降低了直升機(jī)噪聲,減少噪聲污染。而柴/電/混合動(dòng)力發(fā)動(dòng)機(jī)技術(shù)則是直接降低直升機(jī)碳排放。電動(dòng)飛行器是世界各國(guó)重點(diǎn)發(fā)展的未來(lái)飛行器主要技術(shù)方向,是實(shí)現(xiàn)綠色航空的重要途徑。隨著新概念布局、氣動(dòng)結(jié)構(gòu)一體化、電推進(jìn)、超導(dǎo)動(dòng)力傳輸?shù)汝P(guān)鍵技術(shù)的發(fā)展,電動(dòng)飛行器研發(fā)突飛猛進(jìn)。而電池、電動(dòng)機(jī)技術(shù)上的突破,更是助力電動(dòng)飛行器實(shí)現(xiàn)技術(shù)突破[29]。但是電動(dòng)飛行器所涉及到的關(guān)鍵技術(shù)還需要一段很長(zhǎng)的時(shí)間來(lái)獲得徹底的解決。相比于燃油的能量密度12 700 kw·h/kg,目前電池能夠達(dá)到的最大能量密度為500 kw·h/kg,差距還很大。處于巡航狀態(tài)的大型飛機(jī)所需的能量密度為1 kw·h/kg,未來(lái)10~15年,化學(xué)電池能量密度可以達(dá)到1~1.5 kw·h/kg,完全能夠滿足電動(dòng)飛行的需要[30]。電機(jī)技術(shù)也是電動(dòng)飛行器發(fā)展的關(guān)鍵,根據(jù)美國(guó)電動(dòng)機(jī)技術(shù)發(fā)展路線圖規(guī)劃,到2025年電動(dòng)機(jī)系統(tǒng)功率密度可以達(dá)到5.7 kw/kg[31],同時(shí)借助航空高壓直流電源技術(shù),發(fā)展270~540 V高壓直流電源技術(shù),將加快綠色航空出行成為現(xiàn)實(shí)。
2.3 無(wú)人旋翼機(jī)
無(wú)人化技術(shù)具有零傷亡、無(wú)生理限制、耐惡劣環(huán)境使用等技術(shù)特點(diǎn),成為未來(lái)發(fā)展的必然趨勢(shì)。而便攜、隱蔽、任意突防和駐留等能力使微小型旋翼飛行器在未來(lái)軍用民用領(lǐng)域具有更大的發(fā)揮空間。而自主飛行控制、多機(jī)協(xié)同、多棲起降和高效新能源等關(guān)鍵技術(shù)是無(wú)人旋翼機(jī)后續(xù)發(fā)展必須研究的關(guān)鍵技術(shù)。無(wú)人直升機(jī)受環(huán)境、信息傳遞、操縱時(shí)延等因素影響,其適應(yīng)性相對(duì)有人直升機(jī)有一定差距。隨著智能感知、環(huán)境探測(cè)、智能控制、機(jī)器學(xué)習(xí)等智能技術(shù)的發(fā)展與應(yīng)用,無(wú)人直升機(jī)將迎來(lái)技術(shù)上的突破。同時(shí)微型直升機(jī)作為無(wú)人直升機(jī)的一個(gè)分支,其發(fā)展前景廣闊。隨著低雷諾數(shù)空氣動(dòng)力學(xué)、微型化制造、微型電機(jī)、微型動(dòng)力及飛行控制技術(shù)的進(jìn)步,微型直升機(jī)性能正在穩(wěn)步提升。PD-100黑色大黃蜂微型直升機(jī)重量?jī)H16 g,飛行時(shí)間20 min,是已經(jīng)參與實(shí)戰(zhàn)的成功典范[32]。有人與無(wú)人機(jī)協(xié)同技術(shù)更是讓任務(wù)完成率提高10%以上,并可為指揮員提供更多的信息。自1992年以來(lái),美國(guó)陸軍針對(duì)有人/無(wú)人協(xié)同發(fā)展開(kāi)展了技術(shù)研究工作,并實(shí)現(xiàn)了阿帕奇與“捕食者”無(wú)人機(jī)之間的任務(wù)處理器完全融合[33]。有人/無(wú)人協(xié)同的基礎(chǔ)是攻擊規(guī)劃、無(wú)人機(jī)管理、傳感器管理、路徑管理、態(tài)勢(shì)感知顯示、無(wú)人機(jī)控制、編隊(duì)管理、通信管理、交戰(zhàn)管理等關(guān)鍵技術(shù)的突破。實(shí)現(xiàn)有人機(jī)對(duì)無(wú)人機(jī)的有效控制,必須掌握協(xié)同通信、數(shù)據(jù)融合、決策輔助、信息分發(fā)、人機(jī)交互等關(guān)鍵技術(shù)。
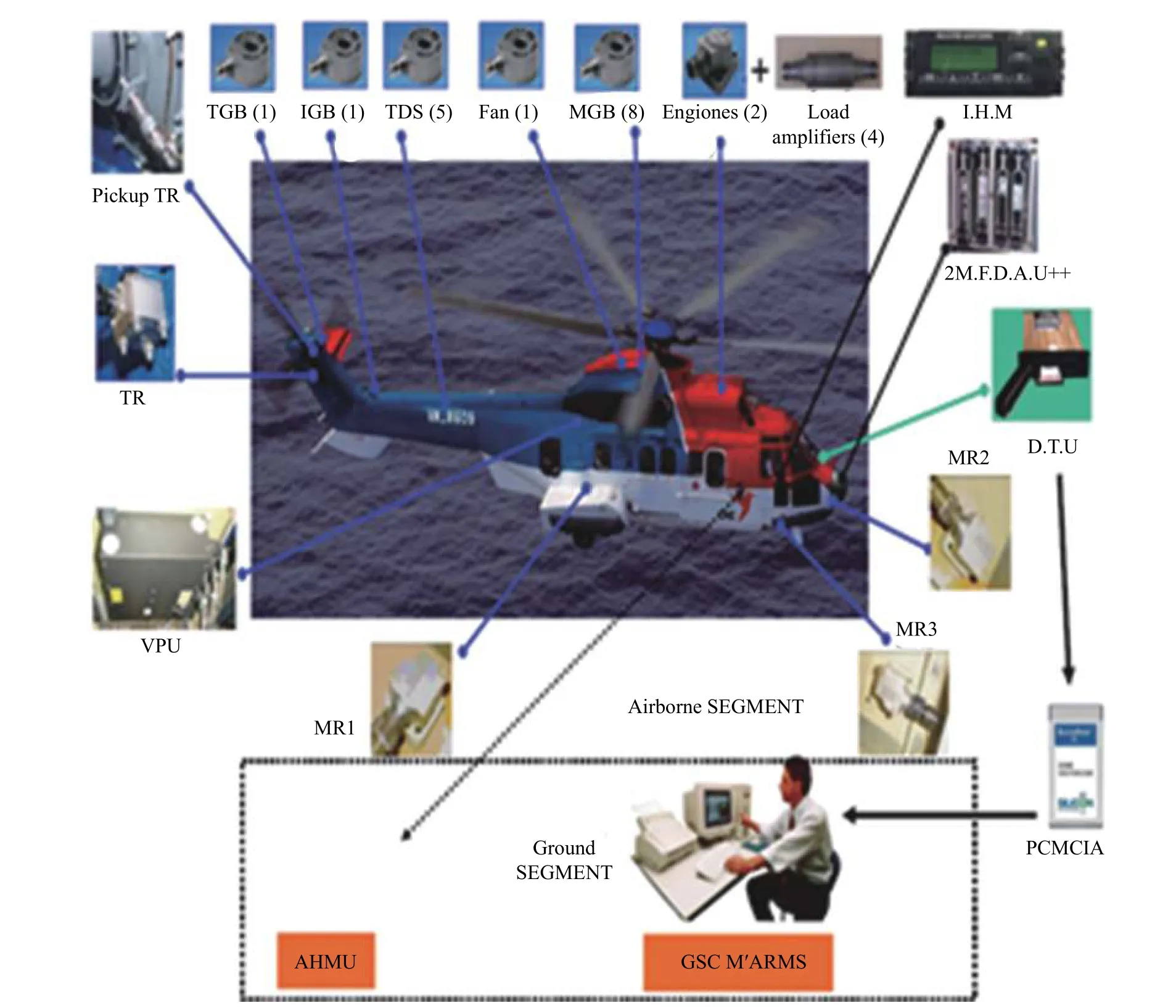
圖5 直升機(jī)健康監(jiān)測(cè)Fig. 5 The helicopter health monitoring
2.4 人工智能
近年來(lái),隨著算法及運(yùn)算能力大幅提升,在計(jì)算機(jī)視覺(jué)、自然語(yǔ)言處理、智能控制等領(lǐng)域獲得了重大突破,人工智能由計(jì)算智能、感知智能,加速走向認(rèn)知智能,從單一智能向基于情景模式的感知、學(xué)習(xí)、抽象和推理演化,面向功能和場(chǎng)景的機(jī)器學(xué)習(xí)、深度學(xué)習(xí)、強(qiáng)化學(xué)習(xí)成為技術(shù)創(chuàng)新熱點(diǎn)。機(jī)器學(xué)習(xí)與推理、自然語(yǔ)言理解、人機(jī)融合等成為軍事人工智能算法的主要方向,利用算法從文本、聲音、圖像、視頻中獲取、挖掘信息,并處理信息,感知周?chē)鷳B(tài)勢(shì),做出合理判斷是其主要研究方向。而直升機(jī)平臺(tái)與人工智能的融合將在智能飛行、多機(jī)智能協(xié)同、任務(wù)自主智能等方面顛覆傳統(tǒng)直升機(jī)使用模式。其中網(wǎng)絡(luò)協(xié)同、操縱控制、人工智能和快速重構(gòu)等方面是旋翼機(jī)后續(xù)發(fā)展的關(guān)鍵技術(shù)[34]。基于神經(jīng)網(wǎng)絡(luò)、遷移學(xué)習(xí)、深度學(xué)習(xí)以及流行學(xué)習(xí)等先進(jìn)理論,發(fā)展而來(lái)的強(qiáng)大的圖像處理以及目標(biāo)檢測(cè)、鑒別和識(shí)別算法,為直升機(jī)智能化開(kāi)辟了新的方向[35]。完全自主的智能化直升機(jī)關(guān)鍵技術(shù)還需要一段時(shí)間的研究,混合增強(qiáng)智能操控技術(shù)、智能自主飛行技術(shù)以及通過(guò)機(jī)器智能輔助來(lái)降低駕駛員反應(yīng)時(shí)間、提高執(zhí)行任務(wù)準(zhǔn)確度,是現(xiàn)階段人工智能在直升機(jī)智能化方面發(fā)展的重點(diǎn)方向之一[36]。圖6為直升機(jī)智能化應(yīng)用構(gòu)想。
2.5 高速直升機(jī)
直升機(jī)高速化一直以來(lái)是直升機(jī)行業(yè)不停追求的目標(biāo)。受飛行特性的限制,直升機(jī)前行槳葉在來(lái)流速度為馬赫數(shù)0.9左右會(huì)產(chǎn)生激波,導(dǎo)致阻力激增,鉸鏈力矩和交變載荷增加,噪聲增大,后行槳葉升力攻角過(guò)大而失速會(huì)引起嚴(yán)重振動(dòng)。設(shè)計(jì)上的平衡讓傳統(tǒng)直升機(jī)槳尖速度在200~220 m/s,對(duì)應(yīng)前飛速度被限制在100 m/s之內(nèi)。為突破這一限制,世界各國(guó)針對(duì)高速新構(gòu)型旋翼機(jī)開(kāi)展了大量的技術(shù)探索和研究。目前主要有三種非常規(guī)構(gòu)型,其中傾轉(zhuǎn)旋翼機(jī)構(gòu)型更適用于運(yùn)輸(如美國(guó)V-22),復(fù)合推力直升機(jī)更適用于武裝攻擊(如美國(guó)SB-1),而旋翼停轉(zhuǎn)或收進(jìn)式飛行器目前尚處于探索階段[37]。圖7為高速旋翼飛行器發(fā)展方向。

圖6 直升機(jī)智能化應(yīng)用構(gòu)想Fig. 6 A conception of the intelligent application of helicopters

圖7 高速旋翼飛行器發(fā)展方向Fig. 7 The development directions of high-speed rotary wing aircrafts
2.5.1 復(fù)合推力直升機(jī)
在復(fù)合推力直升機(jī)構(gòu)型研發(fā)中,SB-1的共軸剛性旋翼機(jī)構(gòu)型是其發(fā)展的主要方向。該構(gòu)型放棄槳盤(pán)左右平衡,以對(duì)稱前行槳葉為主提供升力,并由槳葉剛性保證降低轉(zhuǎn)速后的升力保持和上下槳葉間距,從而可降低槳葉轉(zhuǎn)速、提升飛行速度。這種構(gòu)型直升機(jī)在飛行高度、速度和航程等基本能力上得到加倍提升,同時(shí)機(jī)動(dòng)性、外部尺寸等都優(yōu)于常規(guī)直升機(jī)[38]。
新構(gòu)型相對(duì)常規(guī)直升機(jī)在總體氣動(dòng)布局、剛性槳葉、傳動(dòng)系統(tǒng)、操縱系統(tǒng)、綜合動(dòng)力控制等方面需要建立全新的科研技術(shù)能力,同時(shí)必須注重解決振動(dòng)大和旋翼槳轂阻力高等關(guān)鍵技術(shù)。
2.5.2 雙旋翼傾轉(zhuǎn)旋翼機(jī)
以貝爾公司為代表的歐美一流直升機(jī)研發(fā)機(jī)構(gòu)均在大力推動(dòng)傾轉(zhuǎn)旋翼機(jī)的研制,在V-22批量列裝的基礎(chǔ)上啟動(dòng)了第三代傾轉(zhuǎn)旋翼機(jī)方案論證,并已完成V-280傾轉(zhuǎn)旋翼機(jī)試驗(yàn)飛行。
傾轉(zhuǎn)旋翼機(jī)在大航程飛行時(shí)任務(wù)效率遠(yuǎn)高于常規(guī)直升機(jī)。圖8是常規(guī)直升機(jī)、固定翼飛機(jī)和傾轉(zhuǎn)旋翼機(jī)的使用高度和速度包線。傾轉(zhuǎn)旋翼機(jī)兼具常規(guī)直升機(jī)和定翼機(jī)兩者能力優(yōu)勢(shì)[39],后續(xù)型號(hào)V-280基本覆蓋兩者能力。該構(gòu)型相對(duì)常規(guī)直升機(jī)在總體氣動(dòng)設(shè)計(jì)、傾轉(zhuǎn)旋翼、傾轉(zhuǎn)機(jī)構(gòu)與傳動(dòng)系統(tǒng)、飛行控制等方面需要建立全新的研發(fā)技術(shù),特別是過(guò)渡飛行控制是重大難點(diǎn),V-22科研機(jī)和部分在役機(jī)的墜毀大都與此相關(guān)。
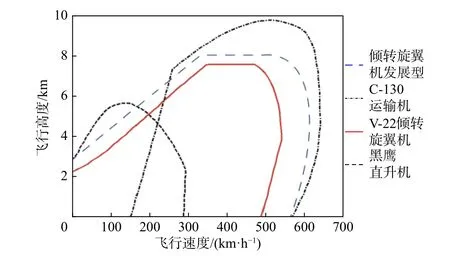
圖8 雙旋翼傾轉(zhuǎn)旋翼機(jī)飛行包線Fig. 8 Flight envelopes of tiltrotors
2.6 多元直升機(jī)
目前,我國(guó)直升機(jī)行業(yè)也正積極探索其他具備高速、長(zhǎng)航程以及垂直起降特征的新構(gòu)型旋翼飛行器技術(shù),尤其關(guān)注“破壞性創(chuàng)新”技術(shù)的出現(xiàn),以期為我國(guó)未來(lái)新構(gòu)型旋翼機(jī)的研制建立基礎(chǔ)。
未來(lái)旋翼飛行器將向多元化發(fā)展,包括構(gòu)型多元化、功能多元化和使用多元化等。未來(lái)多棲旋翼飛行器能使靈活自由出行變?yōu)榭赡堋?/p>
3 我國(guó)直升機(jī)技術(shù)后續(xù)發(fā)展有關(guān)設(shè)想
3.1 先進(jìn)直升機(jī)旋翼槳葉翼型設(shè)計(jì)技術(shù)
目前直升機(jī)旋翼槳葉外形是考慮多種因素的折中設(shè)計(jì),以一種固定狀態(tài)進(jìn)行整體攻角變化,無(wú)法實(shí)現(xiàn)性能、振動(dòng)與噪聲等設(shè)計(jì)要素的全面最優(yōu)化。至今世界各型直升機(jī)的槳葉外形設(shè)計(jì)是綜合考慮動(dòng)力學(xué)特性、材料和結(jié)構(gòu)特點(diǎn)、制造可實(shí)現(xiàn)性等,對(duì)各飛行狀態(tài)下槳葉槳尖形狀、翼型布置、槳葉攻角分布等進(jìn)行分析優(yōu)化后的折中設(shè)計(jì)。
不同噸位、不同任務(wù)目標(biāo)的直升機(jī),在高原和海上等不同使用環(huán)境,在懸停、前飛等不同飛行狀態(tài),直升機(jī)總體參數(shù)和旋翼槳葉展向各處在旋轉(zhuǎn)不同方位處的翼型、尺寸和攻角理想的設(shè)計(jì)參數(shù)都不一樣。圖9為智能旋翼建模及主要結(jié)構(gòu)。
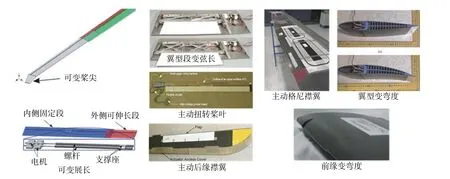
圖9 智能旋翼Fig. 9 Smart rotors
在目前旋翼槳葉只能采用整體固化形狀下,針對(duì)各種狀態(tài)下高度復(fù)雜的旋翼非定常流場(chǎng),國(guó)際先進(jìn)直升機(jī)公司在計(jì)算空氣動(dòng)力學(xué)手段分析支持下,通過(guò)大量風(fēng)洞試驗(yàn)研究,發(fā)展了各槳葉展向位置處適用于不同先進(jìn)直升機(jī)能力需求的專(zhuān)用翼型族。目前我國(guó)只有強(qiáng)調(diào)機(jī)動(dòng)能力的6T級(jí)直升機(jī)槳葉翼型,2 T級(jí)輕型直升機(jī)、10 T級(jí)通用運(yùn)輸機(jī)、13 T級(jí)大型運(yùn)輸機(jī)等都使用這個(gè)翼型,事實(shí)上無(wú)法達(dá)到各型號(hào)的最優(yōu)設(shè)計(jì)目標(biāo)。我國(guó)迫切需要掌握和建立完整的直升機(jī)槳葉翼型族,以此推進(jìn)后續(xù)直升機(jī)研發(fā)任務(wù)的開(kāi)展。
3.2 智能旋翼技術(shù)
隨著新材料、變形結(jié)構(gòu)和系統(tǒng)以及智能化控制技術(shù)的發(fā)展,針對(duì)直升機(jī)各種典型飛行狀態(tài),開(kāi)展槳葉外形智能變形的控制方法和控制機(jī)構(gòu)技術(shù)研究,建立智能旋翼的技術(shù)基礎(chǔ),可使直升機(jī)槳葉外形從全任務(wù)包線能力綜合最優(yōu)的單一外形,發(fā)展到各任務(wù)狀態(tài)槳葉外形都對(duì)應(yīng)變化的多外形智能變換,達(dá)到提高直升機(jī)裝備性能的目標(biāo)[40]。
隨著計(jì)算機(jī)計(jì)算能力的提升,未來(lái)有望針對(duì)不同任務(wù)及其對(duì)應(yīng)的不同飛行狀態(tài),準(zhǔn)確確定槳葉各展向、各方位的理想外形。結(jié)合未來(lái)快速、準(zhǔn)確、長(zhǎng)壽命且適用復(fù)雜振動(dòng)環(huán)境和狹小空間的智能旋翼槳葉外形控制技術(shù)的建立和應(yīng)用,智能旋翼的目標(biāo)將發(fā)展為槳葉各剖面位置外形實(shí)時(shí)變化,直升機(jī)性能將會(huì)進(jìn)一步提升到極致[41]。
3.3 高速直升機(jī)技術(shù)
如下所示,旋翼的升力大小隨旋翼槳盤(pán)面積增大而增大,旋翼下洗流速度隨槳盤(pán)面積增大而減小。
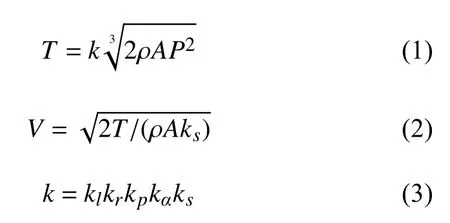
其中,T為旋翼升力,ρ為大氣密度,A為槳盤(pán)面積,P為旋翼功率,kl為滑流理論應(yīng)用誤差程度,kr為槳盤(pán)半徑影響因素(隨半徑減小而降低),kp為槳葉氣動(dòng)先進(jìn)程度,kɑ為旋翼機(jī)使用點(diǎn)與設(shè)計(jì)點(diǎn)偏差程度,ks為旋翼下洗流機(jī)身阻塞影響因素,V為旋翼下洗流速度。
目前國(guó)際在役的V-22魚(yú)鷹傾轉(zhuǎn)旋翼機(jī)空機(jī)重量15 T,海平面懸停重量24 T,在海拔1 600 m處懸停重量21.5 T,同時(shí)旋翼下洗流有10級(jí)狂風(fēng)大小,這些技術(shù)特征尚無(wú)法滿足我國(guó)高原地區(qū)使用要求。綜合考慮使用條件、環(huán)境、技術(shù)等因素,我國(guó)高速直升機(jī)應(yīng)該聚焦四旋翼傾轉(zhuǎn)旋翼機(jī)。在不增加發(fā)動(dòng)機(jī)的情況下,將V-22的雙旋翼增加為同樣大小的4旋翼,懸停飛行重量將增加6 T,扣除結(jié)構(gòu)及系統(tǒng)增重后的有效載荷可增加3 T,旋翼下洗流速度可降到常規(guī)直升機(jī)的8級(jí)風(fēng)水平。圖10為我國(guó)四旋翼傾轉(zhuǎn)旋翼機(jī)構(gòu)想圖。

圖10 四旋翼傾轉(zhuǎn)旋翼機(jī)構(gòu)型Fig. 10 A tiltrotor configuration of quadrotors
四傾轉(zhuǎn)旋翼機(jī)目標(biāo)包線如圖11所示(紅色區(qū)域),可以滿足我國(guó)高原地區(qū)高速運(yùn)輸?shù)热蝿?wù)的需求。7 000 m的巡航飛行高度可以有效避免直升機(jī)在高原峽谷間穿插飛行而必須面對(duì)的山谷風(fēng)切變和雨霧等復(fù)雜環(huán)境問(wèn)題。同時(shí),其近地(海)懸停、機(jī)動(dòng)能力不弱于常規(guī)直升機(jī),具備復(fù)雜高原環(huán)境垂直起降、近地機(jī)動(dòng)能力,懸停和近地低速機(jī)動(dòng)時(shí)飛行器下洗氣流和常規(guī)直升機(jī)相當(dāng),可保證艦面和地面復(fù)雜環(huán)境中人員正常作業(yè)。
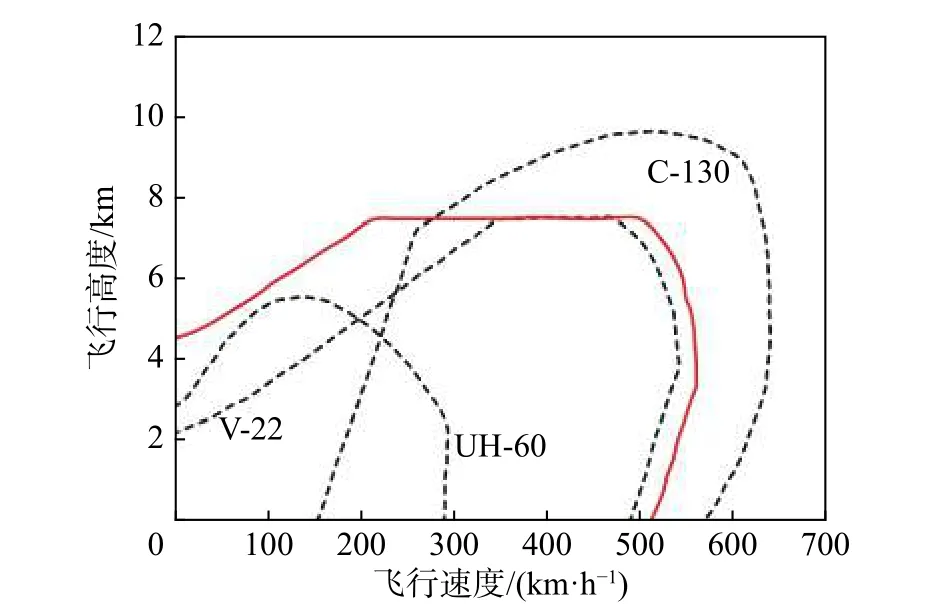
圖11 四傾轉(zhuǎn)旋翼機(jī)飛行包線Fig. 11 Tiltrotor flight envelopes of quadrotors
表1為典型直升機(jī)參數(shù)對(duì)比分析結(jié)果。四傾轉(zhuǎn)旋翼機(jī)需解決的各種技術(shù)問(wèn)題:前置旋翼對(duì)后置旋翼不可避免會(huì)產(chǎn)生嚴(yán)重干擾;旋翼在各種飛行狀態(tài)和機(jī)翼之間存在較強(qiáng)相互氣動(dòng)影響,傾轉(zhuǎn)旋翼機(jī)旋翼和機(jī)翼之間相互干擾影響其低速機(jī)動(dòng)飛行能力,并對(duì)其相應(yīng)狀態(tài)飛行控制產(chǎn)生不利影響;傾轉(zhuǎn)旋翼機(jī)有多種動(dòng)力傳動(dòng)模式,各傳動(dòng)模式各有優(yōu)勢(shì)和不足;旋翼/短艙/機(jī)翼耦合系統(tǒng)在前飛和懸停時(shí)的動(dòng)特性問(wèn)題復(fù)雜,存在“回轉(zhuǎn)顫振”問(wèn)題。針對(duì)上述問(wèn)題需要研究建立相應(yīng)的設(shè)計(jì)理論、方法和技術(shù)。
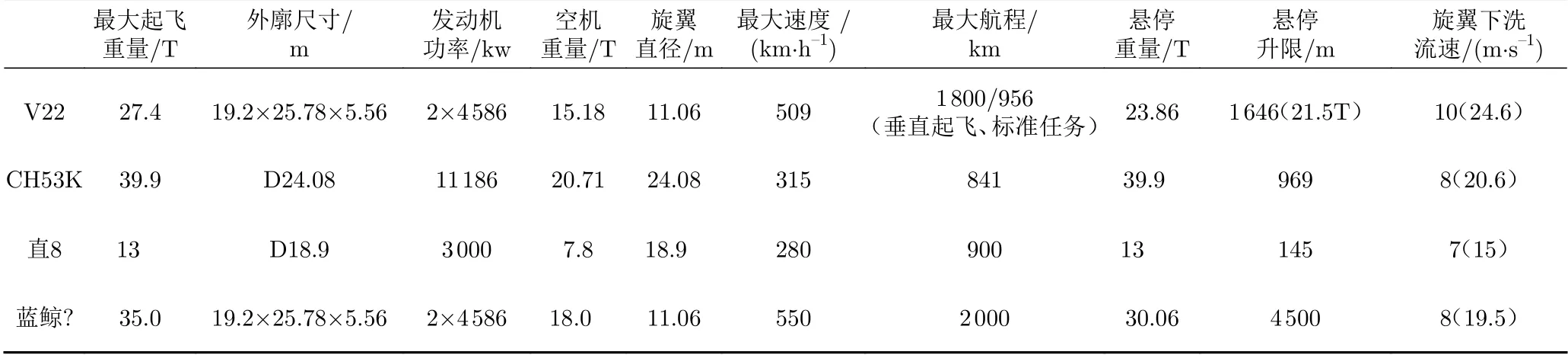
表1 典型直升機(jī)參數(shù)對(duì)比Table 1 A comparison of typical helicopter parameters
此外,針對(duì)傾轉(zhuǎn)旋翼機(jī)在懸停、低速飛行和飛機(jī)飛行模式下的不同需求和技術(shù)特點(diǎn),探索發(fā)展智能變形變轉(zhuǎn)速旋翼,實(shí)現(xiàn)不同飛行狀態(tài)下旋翼氣動(dòng)理想構(gòu)型,是實(shí)現(xiàn)傾轉(zhuǎn)旋翼機(jī)技術(shù)突破的重要方向。
4 結(jié)束語(yǔ)
我國(guó)地形復(fù)雜,高原地區(qū)廣袤,國(guó)外直升機(jī)裝備缺少相應(yīng)的針對(duì)性研發(fā)工作,特別是難于滿足我國(guó)高原地區(qū)的使用需求,因此我國(guó)直升機(jī)研發(fā)必須走獨(dú)立自主的技術(shù)和產(chǎn)品道路。根據(jù)直升機(jī)技術(shù)獨(dú)特復(fù)雜的特性,開(kāi)展“智能、無(wú)人、高速、環(huán)保”技術(shù)研究是未來(lái)直升機(jī)的發(fā)展方向,而筑牢基礎(chǔ)、建立適合我國(guó)國(guó)情的自主旋翼槳葉翼型族是我國(guó)直升機(jī)產(chǎn)業(yè)發(fā)展的根本,適應(yīng)國(guó)情、發(fā)展研發(fā)特有的四傾轉(zhuǎn)旋翼機(jī)是我國(guó)直升機(jī)未來(lái)發(fā)展和突破的有效策略。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國(guó)公路(2017年18期)2018-01-23 03:00:38