一種基于自抗擾方法的姿控直氣復(fù)合控制系統(tǒng)設(shè)計
2021-06-24 02:19:24楊寶慶
空天防御 2021年2期
劉 凱,楊寶慶
(哈爾濱工業(yè)大學(xué)航天學(xué)院,黑龍江哈爾濱 150001)
0 引言
未來空戰(zhàn)要求導(dǎo)彈不斷向高速、高機動和寬空域的方向發(fā)展,這也對導(dǎo)彈控制系統(tǒng)設(shè)計提出了更高要求。但是,由于噪聲干擾和目標(biāo)機動等影響,經(jīng)典PID控制方案下,跟蹤過載信號會有較大的相位差和波動,因此很多學(xué)者提出了新的控制系統(tǒng)設(shè)計方案。文獻(xiàn)[1]針對傾斜轉(zhuǎn)彎/側(cè)滑轉(zhuǎn)彎混合工作模式的空空導(dǎo)彈設(shè)計了基于狀態(tài)相關(guān)黎卡提方程(statedependent Riccati equation,SDRE)非線性調(diào)節(jié)器的姿態(tài)控制系統(tǒng)。文獻(xiàn)[2]基于變結(jié)構(gòu)理論設(shè)計了巡航導(dǎo)彈的控制系統(tǒng),避免了執(zhí)行機構(gòu)飽和問題。文獻(xiàn)[3]設(shè)計了導(dǎo)彈鴨舵/尾舵復(fù)合控制系統(tǒng),并采用序列二次規(guī)劃法對舵指令分配策略進行了優(yōu)化設(shè)計。
然而,以上控制系統(tǒng)多數(shù)都是基于純氣動控制設(shè)計仿真的,考慮到高空域空氣稀薄,氣動舵效率很低,單純的氣動力控制響應(yīng)速度過慢,難以準(zhǔn)確打擊目標(biāo)。為了達(dá)到更快的響應(yīng)速度,可以采用氣動力/直接力復(fù)合控制的方式。目前,常用的直氣復(fù)合方式主要有軌控和姿控兩種。軌控方式發(fā)動機通常安裝在質(zhì)心位置,利用側(cè)向推力解決彈體在高空可用過載不足的問題。姿控方式發(fā)動機配置在導(dǎo)彈頭部或尾部遠(yuǎn)離質(zhì)心處,直接產(chǎn)生姿態(tài)控制力矩迅速改變彈體姿態(tài)建立攻角,以求達(dá)到更快的指令響應(yīng)速度。文獻(xiàn)[4]針對軌控式復(fù)合控制導(dǎo)彈制導(dǎo)控制設(shè)計問題,基于動態(tài)面反步設(shè)計和非線性狀態(tài)觀測器技術(shù)設(shè)計了一體化制導(dǎo)控制方法,通過引入一階濾波器,避免了傳統(tǒng)反步設(shè)計中的“計算膨脹”問題。文獻(xiàn)[5]應(yīng)用滑模變結(jié)構(gòu)控制研究了姿控方式的復(fù)合控制系統(tǒng)設(shè)計方法,在建立攻角的同時能有效減少發(fā)動機數(shù)量消耗。文獻(xiàn)[6]利用系數(shù)圖法(coefficient diagram method,CDM)解決了直氣復(fù)合面臨的多入多出控制系統(tǒng)設(shè)計問題。張?zhí)煊睿?]、王士超[8]和張亞星[9]則對直接力-氣動力分配算法做了深入的研究,提出了混合控制、滑模控制等方法。
本文基于自抗擾控制(active disturbance rejection control,ADRC)方法減小干擾對系統(tǒng)穩(wěn)定性的影響,通過在彈體前端增加若干個姿控發(fā)動機提高系統(tǒng)指令響應(yīng)速度,采用模糊控制設(shè)計了氣動力與直接力的指令分配策略,從而保證了導(dǎo)彈在較高飛行空域的快速響應(yīng)能力。
1 導(dǎo)彈數(shù)學(xué)模型的建立
1.1 彈體動力學(xué)模型
本文設(shè)定的導(dǎo)彈模型如圖1所示。彈體具有軸對稱外形,在彈體尾部安裝有4片相同尾舵,在彈體前端安裝有5 圈姿控發(fā)動機,每圈均勻分布著36 個噴口。導(dǎo)彈采用側(cè)滑轉(zhuǎn)彎(skid to turn,STT)轉(zhuǎn)彎方式,俯仰與偏航通道通過氣動舵與姿控發(fā)動機協(xié)同控制,滾轉(zhuǎn)通道在制導(dǎo)過程中由氣動舵保持穩(wěn)定。
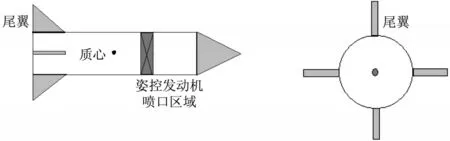
圖1 導(dǎo)彈外形Fig.1 Missile configuration
建立導(dǎo)彈質(zhì)心動力學(xué)方程的分量表達(dá)式為
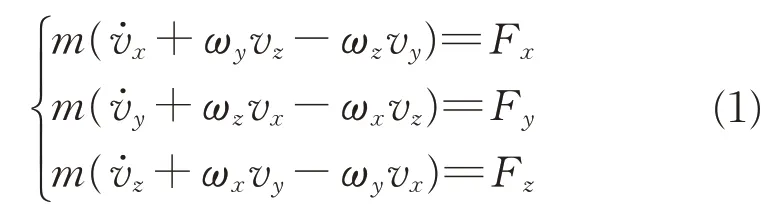
式中:Fx、Fy、Fz為導(dǎo)彈所受合外力在彈體坐標(biāo)系中的分量;vx、vy、vz為導(dǎo)彈速度矢量在彈體坐標(biāo)系中的分量;ωx、ωy、ωz為彈體角速度矢量在彈體坐標(biāo)系中的分量;m為彈體質(zhì)量。
建立導(dǎo)彈繞質(zhì)心轉(zhuǎn)動動力學(xué)方程的分量表達(dá)式為
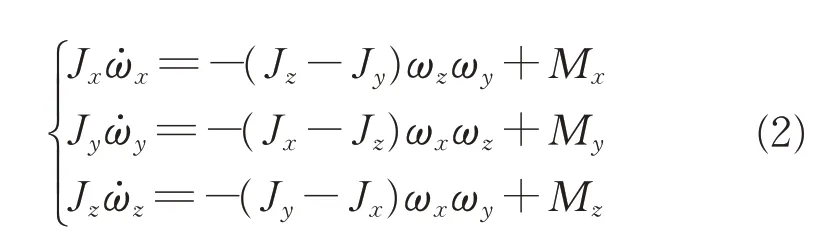
式中:Mx、My、Mz分別為作用在導(dǎo)彈上的所有外力對質(zhì)心的力矩在彈體坐標(biāo)系各軸上的分量;Jx、Jy、Jz分別為彈體各軸轉(zhuǎn)動慣量。
導(dǎo)彈的質(zhì)心運動建立在慣性坐標(biāo)系中,其分量表達(dá)式為
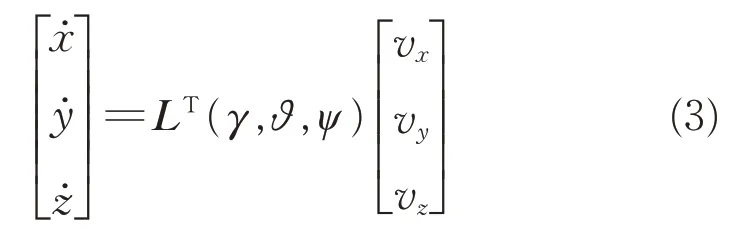
式中:L為地面坐標(biāo)系到彈體坐標(biāo)系的轉(zhuǎn)換矩陣;γ、?、ψ分別為彈體滾轉(zhuǎn)角、俯仰角、偏航角。
導(dǎo)彈繞質(zhì)心轉(zhuǎn)動的運動學(xué)模型建立在彈體坐標(biāo)系下,其分量表達(dá)式為
式中:ωx1、ωy1、ωz1為彈體坐標(biāo)系中的角速度分量。
1.2 近似線性模型
由上文推導(dǎo)的動力學(xué)模型可知,轉(zhuǎn)彎過程中期望滾轉(zhuǎn)角γc為0,考慮短周期小攻角運動過程,對動力學(xué)方程做線性化處理,如式(5)~(6)所示。
俯仰通道:

偏航通道:
式中:a1為導(dǎo)彈空氣動力阻尼系數(shù);a2為導(dǎo)彈的靜穩(wěn)定動力系數(shù);a3為導(dǎo)彈的舵效率系數(shù);a4為切線轉(zhuǎn)動的角速度增量;a5為尾舵舵面動力系數(shù);α、β、δy、δz分別為攻角、側(cè)滑角、方向舵偏角、升降舵偏角。
2 氣動力控制子系統(tǒng)設(shè)計
2.1 自抗擾控制策略分析
自抗擾控制器主要由3 部分組成:跟蹤微分器(tracking differentiator,TD),擴張觀測器(extended state observer,ESO)和非線性反饋(nonlinear state error feedback,NLSEF)。跟蹤微分器主要通過事先安排過渡過程,提取含有隨機噪聲的輸入信號和微分信號,解決傳統(tǒng)PID控制超調(diào)與快速性之間的矛盾。擴張觀測器可以通過觀測獲得對象模型中內(nèi)擾和外擾的實時值,最后非線性反饋控制根據(jù)TD得到的給定信號與信號微分,以及ESO觀測到的擾動信號,對系統(tǒng)進行控制和擾動補償。在實際應(yīng)用中,ADRC控制可以將模型中未建模部分當(dāng)做干擾進行補償,因此它并不依賴于精確的系統(tǒng)數(shù)學(xué)模型,具有很強的抗擾動性和魯棒性。
本文研究內(nèi)容為末制導(dǎo)階段,所以設(shè)定主發(fā)動機推力P=0。同時考慮到彈體對稱性,俯仰通道與偏航通道設(shè)計基本相同,本文將基于簡化后的模型設(shè)計俯仰通道氣動舵控制器和直接力發(fā)動機的開啟邏輯。氣動力控制策略采用三環(huán)控制,由外向內(nèi)依次是:法向過載環(huán)、攻角環(huán)、俯仰角速度環(huán)。法向過載環(huán)采用PI 控制,攻角環(huán)和俯仰角速度環(huán)采用ADRC 控制。俯仰通道設(shè)計如圖2所示,圖中:nyc為法向過載指令;ny為實際法向過載;ωzc為角速度指令;ωz為彈體實際角速度;f為外界干擾;αc為攻角指令;δzc為升降舵偏角指令。
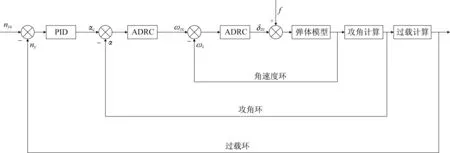
圖2 基于ADRC和PID的三環(huán)俯仰通道設(shè)計Fig.2 The three loops pitch channel design based on ADRC and PID
在彈體姿態(tài)控制系統(tǒng)中,ADRC 估計的擾動主要包括模型不確定性和外部干擾。在直氣復(fù)合控制下,直接力裝置開啟時產(chǎn)生的側(cè)向噴流會對彈體繞流產(chǎn)生干擾,形成側(cè)噴干擾效應(yīng),該效應(yīng)會加劇氣動參數(shù)攝動與通道間的耦合,從而使直氣復(fù)合控制導(dǎo)彈的參數(shù)攝動范圍明顯大于傳統(tǒng)氣動舵控制導(dǎo)彈的參數(shù)攝動范圍[10-12]。近似線性模型忽略了這些特性,在ADRC 控制中將這一部分與外部干擾一同進行估計和補償。與PID 控制相比,ADRC 控制充分考慮了模型的不確定性,具有更好的魯棒性和動態(tài)性能。
2.2 法向過載環(huán)設(shè)計
過載環(huán)的目的是快速跟蹤過載指令和消除過載偏差。考慮到過載環(huán)數(shù)學(xué)模型較為簡單,為簡化控制策略,法向過載環(huán)采用PI控制即可有效消除跟蹤信號的穩(wěn)態(tài)誤差,但初始階段可能出現(xiàn)小幅振蕩,該環(huán)節(jié)輸出αc,控制環(huán)節(jié)表達(dá)式為

式中:kp為比例系數(shù);ki為積分系數(shù)。
2.3 攻角環(huán)設(shè)計
一般來說,舵偏角變化速度要遠(yuǎn)大于彈體攻角變化速度,因此攻角環(huán)和角速度環(huán)可以分開設(shè)計,互不干擾。攻角環(huán)輸入為攻角指令αc,輸出為角速度指令ωzc,由彈體動力學(xué)方程可得

式中:dα為外界干擾;Ty為俯仰方向直接力;Y為俯仰方向氣動力;v為彈體速度。將模型簡化為

式中:
式中:f10視作未知干擾部分;f11為已知部分。設(shè)計擴展?fàn)顟B(tài)觀測器時可以把f10和f11作為一個整體進行估計,設(shè)計狀態(tài)觀測器為
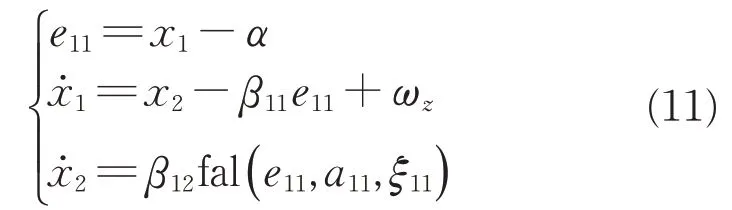
式中:x1為彈體實際攻角α的估計值;x2為未知部分的估計值;e11為估計值與觀測值的誤差;β11、β12為控制器增益;fal(·)定義為
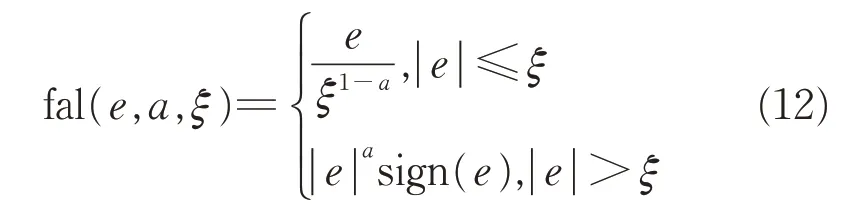
式中:e為表示偏差的參數(shù);a為0~1 之間的常數(shù);ξ為影響濾波效果的常數(shù)。
基于該狀態(tài)觀測器,由擾動估計x2實現(xiàn)補償,設(shè)計外環(huán)控制律為
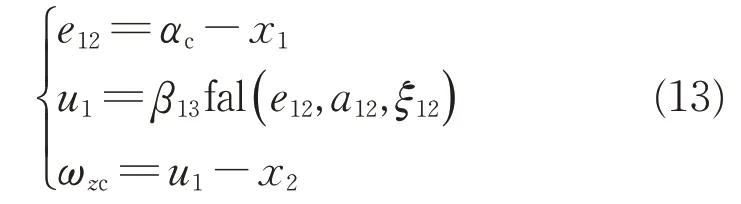
式中:u1為控制量;e12為估計值與攻角指令的誤差;β13為控制器增益。
根據(jù)式(13)可求得攻角環(huán)的控制輸出ωzc。
2.4 角速度環(huán)設(shè)計
設(shè)計角速度環(huán)主要是為了在有擾動的情況下及時跟蹤角速度指令,輸出為舵偏角指令δz,由彈體動力學(xué)方程可得
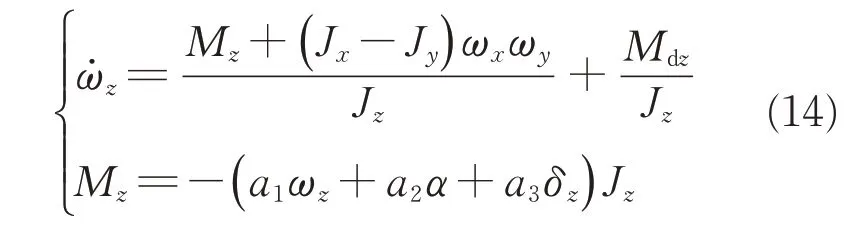
式中:Mz、Mdz為氣動力矩和干擾力矩。同樣該模型可以簡化為

式中:
根據(jù)以上簡化模型,可以設(shè)計狀態(tài)觀測器為
式中:x3為彈體實際俯仰角速度ωz的估計值;x4為未知干擾部分的估計值;e21為估計值與觀測值的誤差;β21、β22為控制參數(shù)。
基于該狀態(tài)觀測器,由擾動估計x4實現(xiàn)補償,設(shè)計外環(huán)控制律為
式中:u2為控制量;e22為估計值與角速度指令的誤差;β23為控制參數(shù)。
3 直接側(cè)向力控制子系統(tǒng)設(shè)計
3.1 基于模糊控制的指令分配方式
直接力具有響應(yīng)快但不連續(xù)的特點,在直氣復(fù)合控制系統(tǒng)中,我們利用直接力響應(yīng)快的特點迅速產(chǎn)生力矩并建立攻角,然后再通過氣動力修正過載偏差值。因此,如何分配力矩是直氣復(fù)合的重要問題,若直接力矩分配過少,起不到快速響應(yīng)、增加最大過載的目的;若直接力矩分配過多,控制系統(tǒng)容易振蕩,影響制導(dǎo)精度。本文采用模糊控制的方式確定分配系數(shù)。
首先,對實際過載與過載指令的偏差值Δn進行歸一化處理,可表示為
其中,若|Δn|>1,則令|Δn|=1。
一般來說,彈目距離R越大,姿態(tài)調(diào)整時間越充裕;Δn越大,姿態(tài)調(diào)整幅度也越大。因此,當(dāng)彈目相對距離R較小且Δn較大時,需要開啟側(cè)向直接力對彈體姿態(tài)進行迅速調(diào)節(jié),此時在力矩分配上直接力應(yīng)有較大權(quán)重。其余情況下,為了節(jié)約發(fā)動機燃料可以設(shè)定直接力權(quán)重較小。綜上所述,根據(jù)這兩個外部參數(shù)可以制定相應(yīng)的模糊規(guī)則表,可在線解算出直接力權(quán)重k。設(shè)計模糊規(guī)則表如表1所示。
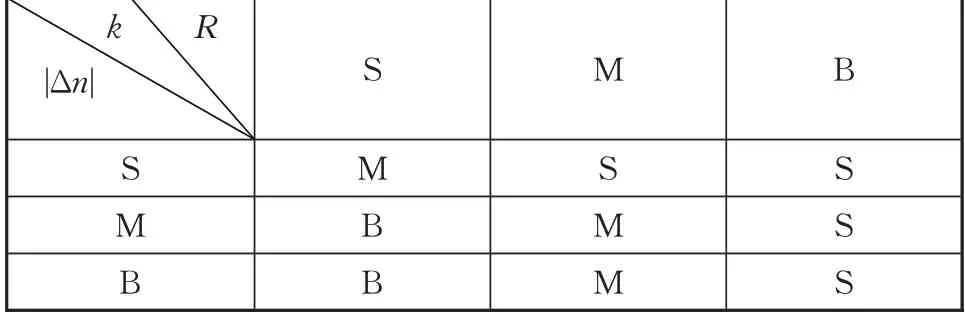
表1 模糊規(guī)則表Tab.1 Fuzzy rule table
其中,S、M、B分別表示小、中、大。對于彈目相對距離R,S、M、B 分別對應(yīng)0、1 500 m、3 000 m;對于過載偏差Δn,S、M、B分別對應(yīng)0、0.5、1.0;對于直接力權(quán)重k,S、M、B分別對應(yīng)0.1、0.5、0.9。為簡化模型,這里采用三角形隸屬度函數(shù)計算,通過重心法解模糊,在線求解k。
3.2 矢量合成點火邏輯
直接側(cè)向力控制系統(tǒng)輸入為俯仰通道直接力指令Fy和偏航通道直接力Fz在直接力控制系統(tǒng)中對兩個指令進行矢量合成解得合力F。點火邏輯大體思路為:已知合力大小和合力方向,開啟與期望方向最接近的列所在的發(fā)動機,直至達(dá)到期望的力矩大小;若最接近的列所有發(fā)動機已消耗完畢,則尋找次接近的發(fā)動機;若開啟一個發(fā)動機后形成的控制力矩超過期望值并達(dá)到某個閾值,則關(guān)閉該發(fā)動機。為簡化點火邏輯,增加以下限制:
1)圈數(shù)的選取始終按照從遠(yuǎn)到近的原則,因為距離質(zhì)心越遠(yuǎn),產(chǎn)生的力矩就越大,更容易滿足指令跟蹤的要求;
2)每次只選取一列的發(fā)動機,若該列剩余發(fā)動機全部開啟也不滿足要求,則直接退出循環(huán),完成選取過程;
3)若在合力矢量方向附近±20°范圍內(nèi)都沒有可用發(fā)動機,直接退出該次選取過程。
3.3 氣動力/直接力復(fù)合控制方案
考慮到實際情況中點火周期要遠(yuǎn)大于控制周期,直接側(cè)向力難以及時、精確地跟蹤直接力指令,所以需要先確定直接力輸出,再計算氣動力進行修正。整體控制思路為:先根據(jù)彈目距離R和過載偏差Δn計算出直接力權(quán)重k,然后經(jīng)過ADRC 控制器解算出整體所需力矩M,再根據(jù)力矩M和k計算直接力指令Fy和Fz。通過點火邏輯計算出最合適的姿控發(fā)動機開啟方案,解算出直接力矩的實際輸出值Md。最后將力矩差(M-Md)作為氣動力矩指令輸出到氣動舵?zhèn)鲃幽K,完成控制過程。控制結(jié)構(gòu)如圖3所示。
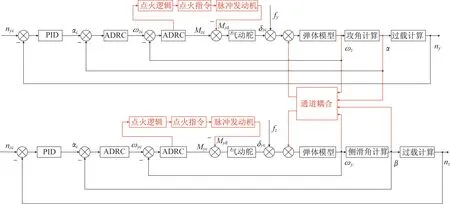
圖3 控制系統(tǒng)結(jié)構(gòu)Fig.3 Control system structure
4 仿真驗證
選取某型號攔截彈飛行高度為20 km、初始速度為1 000 m/s的氣動參數(shù)作為仿真參數(shù)。設(shè)定控制周期為0.5 ms,控制周期為2.5 ms,每個脈沖發(fā)動機點火時間為50 ms,脈沖推力為1500 N,放置于質(zhì)心前1.3 m 處。同時在仿真過程中假設(shè)飽和舵偏角為±30°。
控制器參數(shù)設(shè)計為:kp=0.0015,ki=0.4,β11=100,
β12=85,β13=4,β21=100,β22=65,β23=40,a11=a21=0.25,ξ11=ξ21=0.001,a12=a22=0.5,ξ12=ξ22=0.1。
4.1 算例1
在上述仿真條件下,分別用直氣復(fù)合控制方式和純氣動力方式跟蹤幅值為9g的法向過載指令,仿真結(jié)果如圖4和圖5所示。
由圖4(b)可知,純氣動力控制下氣動舵容易飽和,因此姿態(tài)角有較大的跟蹤偏差。圖4(a)在引入姿控直接力后,有效解決了高空氣動力不足的問題,跟蹤效果明顯改善。圖5中,黑色線為過載指令nyc,藍(lán)色線為直氣復(fù)合控制下的實際過載ny1,紅色線為純氣動力控制下的過載ny2。結(jié)果表明,直氣復(fù)合方式超調(diào)量較小,穩(wěn)定時間較短,其控制系統(tǒng)性能要明顯優(yōu)于純氣動力方式。
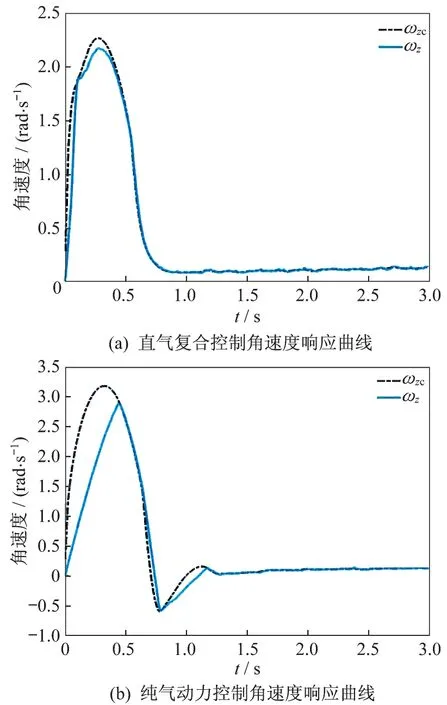
圖4 角速度響應(yīng)曲線Fig.4 Response curve of angular velocity
4.2 算例2
在末制導(dǎo)段加入導(dǎo)引頭測量噪聲進行目標(biāo)攔截仿真實驗,設(shè)定仿真環(huán)境如下:
1)進入末制導(dǎo)階段時,導(dǎo)彈速度為1 000 m/s,與目標(biāo)側(cè)向偏差為y=300 m,z=200 m,飛行高度為20 km,在目標(biāo)后方3 000 m時進行跟蹤攔截;
2)目標(biāo)初始速度為600 m/s,初始俯仰角為-0.05 rad,在彈目距離為1 000 m時以0.03 rad/s的角速度爬升以進行規(guī)避。
通過調(diào)節(jié)獲得一組控制參數(shù),仿真結(jié)果如圖5~9所示。
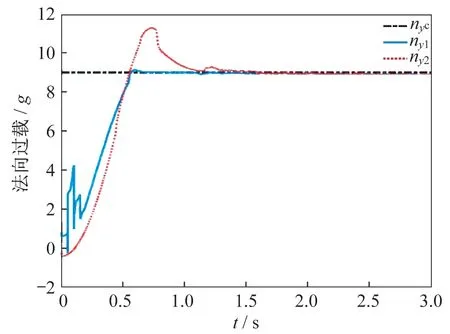
圖5 法向過載響應(yīng)曲線Fig.5 Response curve of longitudinal overload
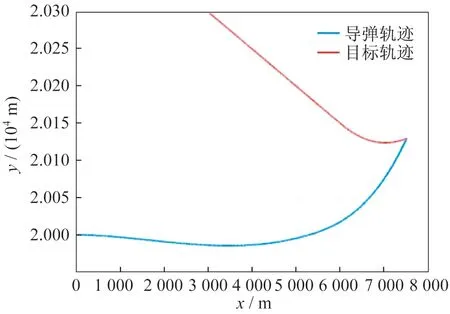
圖6 縱向平面彈目軌跡Fig.6 The trajectory in longitudinal plane
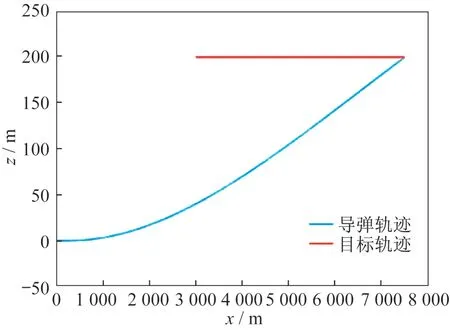
圖7 橫向平面彈目軌跡Fig.7 The trajectory in horizontal plane
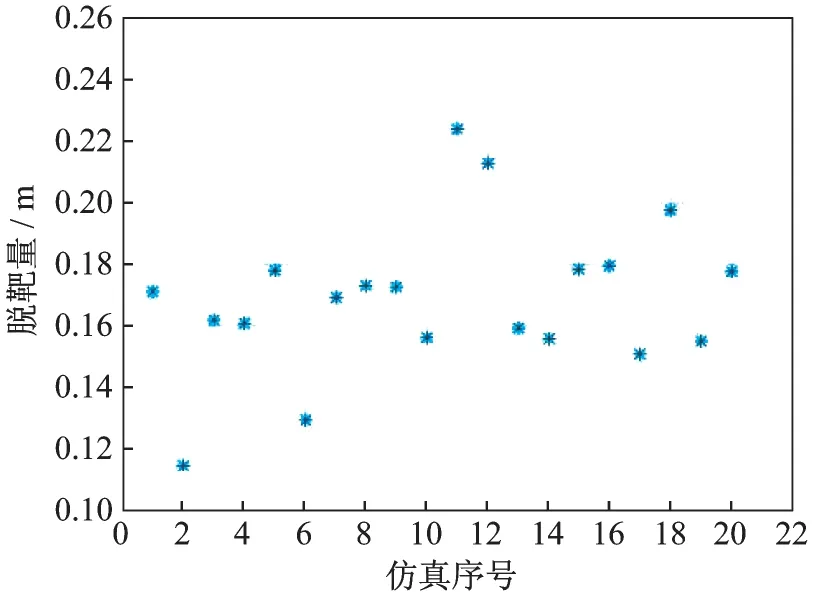
圖8 脫靶量統(tǒng)計Fig.8 Statistical data of miss distance
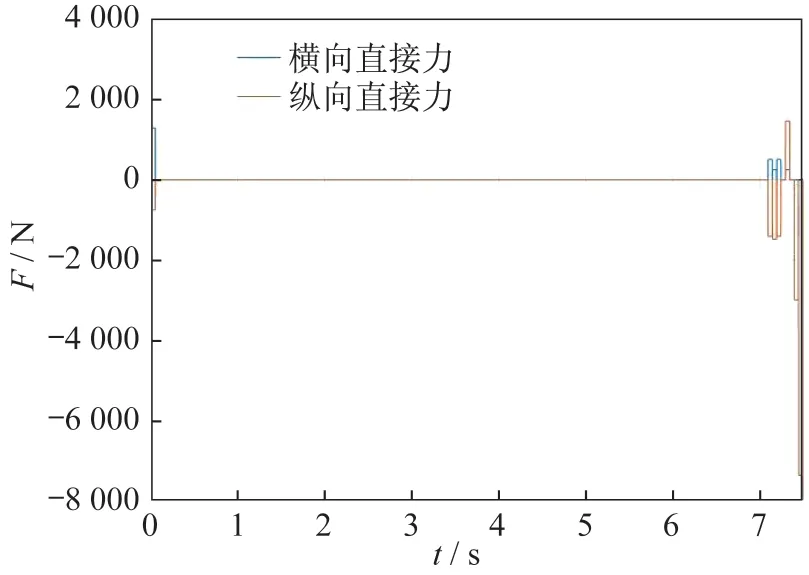
圖9 直接力曲線Fig.9 Direct lateral force curve
由圖6~7 可知,目標(biāo)先以固定角度向斜下方飛行,隨后向上減速爬升做規(guī)避機動,在爬升段被導(dǎo)彈截獲。彈目初始距離約為3 000 m,最終導(dǎo)彈截獲目標(biāo)。根據(jù)圖8中的脫靶量統(tǒng)計數(shù)據(jù)可計算得到脫靶量均值為0.169 0 m,標(biāo)準(zhǔn)差為0.024 8,表明直氣復(fù)合方式有較好的攔截效果。
由圖9 可知,在0 s 和7 s 左右側(cè)向發(fā)動機開啟,此時正是過載指令偏差較大時,需要直接力輔助調(diào)節(jié)彈體姿態(tài)。圖10為彈體法向過載響應(yīng)曲線,盡管存在一定相位差,但實際過載還是能迅速跟蹤過載指令,從而保證該復(fù)合控制系統(tǒng)具備良好的穩(wěn)定特性和動態(tài)特性。
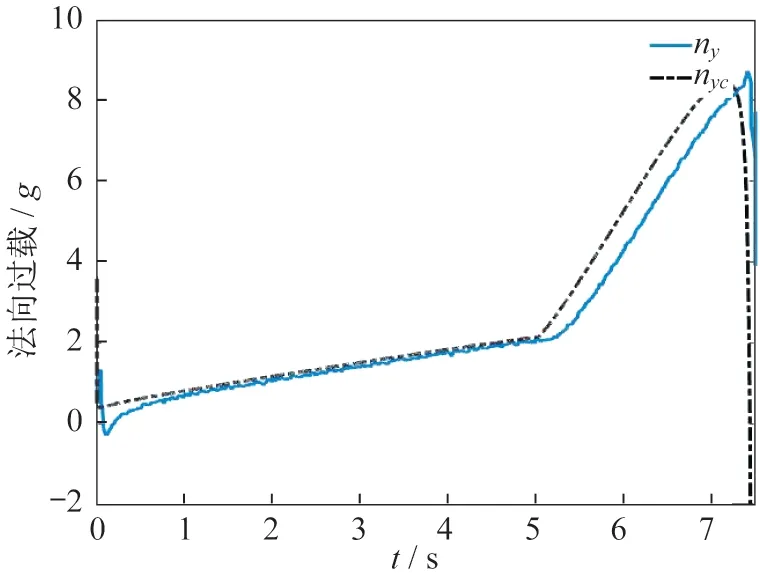
圖10 法向過載響應(yīng)曲線Fig.10 Response curve of longitudinal overload
綜合以上仿真結(jié)果,基于ADRC 姿控直氣復(fù)合控制方式可以提高指令響應(yīng)速度,同時可以避免控制過程中氣動舵輸出飽和。
5 結(jié)束語
考慮到純氣動控制在高空飛行中存在指令響應(yīng)速度較慢、氣動舵易飽和的問題,本文設(shè)計了基于ADRC 的姿控直氣復(fù)合控制方案。先用ADRC 設(shè)計純氣動控制,然后利用模糊控制設(shè)計了氣動力/直接力的舵偏角分配系數(shù),再引入直接力來控制子系統(tǒng)并分擔(dān)氣動舵的力矩。經(jīng)過Matlab 平臺上的仿真驗證,證明該復(fù)合方案在攔截高空目標(biāo)時仍能保證快速的指令響應(yīng)和較小的脫靶量。本文提出的方案適用于高空域攔截彈的自動駕駛儀設(shè)計,具有一定的工程應(yīng)用價值。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電信科學(xué)(2016年10期)2016-11-23 05:11:56
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
