改進卡爾曼濾波算法在動態扭矩傳感器中的應用
2021-06-22 08:28:42高華東
機電產品開發與創新 2021年3期
高華東, 崔 婕
(中國航天空氣動力技術研究院, 北京100074)
0 引言
動態扭矩傳感器用于扭矩測量、 轉速及機械功率測試等,在工業控制、測試測量、航空航天等領域均具有廣泛應用。
由于機械結構的限制, 動態扭矩傳感器通常采用無線供電的方式, 通過線圈耦合實現電能由定子向轉子的輸送,在通過整流和濾波,得到直流電壓。
動態扭矩傳感器的應變信號為微弱信號, 一般為0.5mV/V~2mV/V,因此在測試測量中,不可避免的受到較大干擾。 動態扭矩傳感器的干擾主要有內部干擾和外部干擾。 外部干擾指外界的干擾波和環境因素如電磁干擾靜電干擾, 內部干擾主要指傳感器采集信號和信號模數轉換的過程中以脈沖干擾的方式對信號造成誤差, 還存在于所有電子器件和傳輸介質中以電子熱振動導致的溫度變化所引起的熱噪聲。 由于動態扭矩傳感器采取線圈耦合供電的方式進行供電,周期性脈沖干擾較為嚴重。
對內部干擾采取軟件濾波,不緊可以簡化硬件電路,還可以避免硬件的二次干擾,且降低成本。 采用滑動平均濾波算法,可以消除周期性脈沖干擾和高斯噪聲,但是當窗長度較短時,濾波效果不明顯,窗長度較長時,延時又比較嚴重。 為了取得較好的濾波效果并保持較好的頻率特性,對卡爾曼濾波算法進行改進,將滑動平均濾波算法與卡爾曼濾波算法進行組合的方式, 提高了動態扭矩傳感器的測試精度。
1 動態扭矩傳感器結構及算法設計
動態扭矩傳感器由電源系統、惠斯通電橋、放大器、AD 轉換、微處理器、無線發射模塊及其外圍電路組成,見圖1。
定子供電一般為直流電源。 為了通過線圈將電能輸送給轉子, 需要通過逆變電路將直流電壓轉化為交流電壓, 在轉子上再通過整流濾波轉化為直流電壓。 該過程也是干擾產生的重要來源。
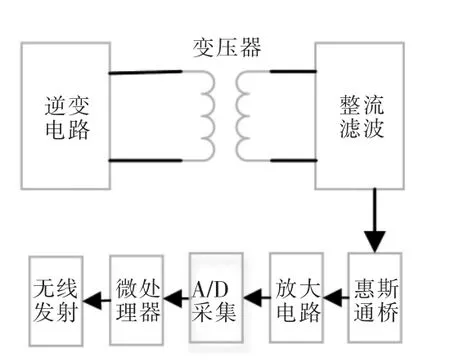
圖1 動態扭矩傳感器結構
惠斯通電橋將轉矩信號轉換為mV 級電信號, 經過放大電路處理后,由AD 采集模塊進行數字化。 放大器在進行放大時,連同噪聲一起放大。另外在A/D 轉換模塊將帶有干擾的模擬信號轉換為數字信號過程中會因為溫度導致熱噪聲影響其分辨率進而影響動態扭矩傳感器的精確度。
對于采集過程中的高斯白噪聲或模數轉化過程中產生的量化噪聲,可以通過滑動平均濾波來消除。但對于非周期較大的干擾信號,滑窗濾波算法的抑制性很差。且當干擾較大時, 需要很長的窗長度才能達到理想的濾波效果,這就大大降低了頻率特性。卡爾曼濾波算法也能消除白噪聲和周期性干擾脈沖,但對于非周期干擾脈沖,會引入線性誤差。
為了有效濾除周期性脈沖干擾、非周期性脈沖干擾、高斯白噪聲、量化噪聲等,對卡爾曼濾波算法進行改進,見圖2。

圖2 改進卡爾曼濾波算法
首先采用閾值濾波算法, 對偶然因素引起的脈沖干擾進行剔除。對于循環采樣,將更新的采樣值與對比值之差與系統所允許的最大差值來進行比較。 當在允許范圍內時,該次采樣有效,當超過允許范圍,該次采樣用對比值來代替。

式中:Dn—該次采樣值;Dc—對比值,由滑窗濾波器給出;A0—系統允許的采樣值與對比值的最大差值。
經過閾值濾波器處理后的數據Y0(n)進入滑窗濾波器進行平滑。 規定窗口長度M,按照先入先出原則,每次增加一個數, 然后去掉一個最老的數, 數目總數保持M不變。 然后對這M 個數求平均數。 數學表達式為:

該波器輸出的信號去往閾值濾作為對比值Dc, 并作為下一級卡爾曼濾波器的輸入。
卡爾曼濾波器的基本結構見圖3。

圖3 卡爾曼濾波器的基本結構
卡爾曼濾波器的實質就是, 將實際信息與測量信息有機融合,從而得到最大概率的控制量。 對于一個線性離散系統,其狀態空間方程為:

式中:H—測量系統的參數, 對于多測量系統而言,H—矩陣。 W(k)和V(k)—表示過程和測量的噪聲。 他們被假設成高斯白噪聲(White Gaussian Noise),他們的協方差(covariance)分別是Q,R(這里我們假設他們不隨系統狀態變化而變化)。
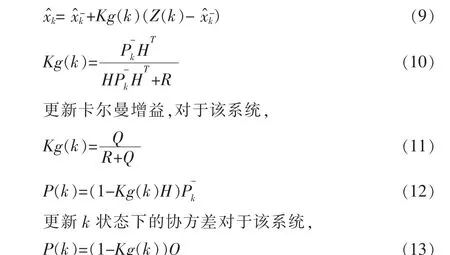
卡爾曼濾波器的實現由以下五個公式組成:

組合預測值和觀測值,得到最優估計值;Z(k)—觀測值。 對于該系統,
2 試驗測試
試驗中,采用的動態扭矩傳感器量程為500Nm,滿量程信號輸出為0.5mV/V。 AD 采集模塊選用了24 位高集成度芯片AD7192,該芯片內部集成了PGA,最大放大倍數為128 。 為了提高標定精度,采用砝碼作為負載,通過靜態標定的方式得到標定數據, 同一力矩下, 每隔1min記錄一次數據,共計三次。 濾波前后試驗數據見表1。

表1 濾波前后試驗數據
3 結論
測試結果見圖4。

圖4 濾波前后試驗結果圖
根據上圖可到以下結論:
(1)濾波后,傳感器線性度、重復性明顯優于濾波前;
(2)濾波后,傳感器的精度更加精確;
(3)濾波后,傳感器的穩定度更高。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
