激光雷達(dá)運(yùn)動(dòng)畸變?nèi)コ乃惴ㄔO(shè)計(jì)
2021-06-17 08:38:08李登峰黃杉杉龔慶紅
自動(dòng)化儀表 2021年5期
關(guān)鍵詞:方法
王 雪,李登峰,黃杉杉,龔慶紅
(長安大學(xué)嵌入式系統(tǒng)應(yīng)用研究所,陜西 西安 710061)
0 引言
為了降低成本,當(dāng)前市場(chǎng)上絕大多數(shù)智能小車都使用一些低成本的移動(dòng)底盤和激光雷達(dá)作為智能小車的主要傳感器。成本降低通常會(huì)降低智能小車?yán)锩鎮(zhèn)鞲衅鞯募庸ぞ冉档停瑥亩鴮?dǎo)致里程計(jì)信息和激光雷達(dá)所掃描出來的數(shù)據(jù)信息的準(zhǔn)確性降低[1]。而傳感器輪式里程計(jì)的精度越差,智能小車運(yùn)動(dòng)過程中產(chǎn)生的累計(jì)誤差也就越大,使智能小車所構(gòu)建的環(huán)境地圖效果也就越差。低成本的激光雷達(dá)一般采用單線雷達(dá)[2],掃描頻率較低。當(dāng)掃描頻率較低時(shí),假如小車快速運(yùn)動(dòng),激光雷達(dá)所掃描出來的位姿信息就會(huì)發(fā)生嚴(yán)重的畸變。為了解決上述問題,本文介紹了輪式里程計(jì)輔助方法的原理。但是由于輪式里程計(jì)輔助方法是位置線性假設(shè),位置線性假設(shè)沒有誤差線性假設(shè)合理。因此,本文提出了輪式里程計(jì)和迭代最近點(diǎn)(iterative closest point,ICP)方法的融合。
1 傳感器輪式里程計(jì)輔助算法
去除激光雷達(dá)運(yùn)動(dòng)畸變的方法有ICP、速度估計(jì)迭代最近點(diǎn)(velocity estimation iterative closest point,VICP)、里程計(jì)的輔助方法。但是ICP和VICP法存在一些問題:一是當(dāng)激光雷達(dá)掃描頻率是低幀率時(shí),對(duì)小車勻速運(yùn)動(dòng)的假設(shè)不成立;二是數(shù)據(jù)預(yù)處理和狀態(tài)估計(jì)過程耦合。因此,提出了傳感器的輔助方法,包括里程計(jì)輔助方法和慣性測(cè)量組合(inertial measuring unit,IMU)輔助方法。此方法的優(yōu)點(diǎn)是可以比較準(zhǔn)確地估計(jì)局部位姿,還可以跟狀態(tài)估計(jì)解耦。但I(xiàn)MU輔助方法測(cè)量線性加速度的精度較差,并且二次積分在局部的精度也很差。相比較于IMU輔助方法,輪式里程計(jì)輔助方法局部位置測(cè)量和角度測(cè)量的精度較高,速度更新更快[3]。
輪式里程計(jì)輔助方法的原理:運(yùn)用分段線性插值函數(shù)估計(jì)每個(gè)激光點(diǎn)對(duì)應(yīng)的位姿,將得到的位姿進(jìn)行坐標(biāo)轉(zhuǎn)換,最后轉(zhuǎn)換為激光數(shù)據(jù)并發(fā)布。
已知當(dāng)前幀激光起始時(shí)間結(jié)束時(shí)間為ts、te,兩個(gè)激光束之間的時(shí)間間隔為Δt。輪式里程計(jì)輔助算法步驟如下。
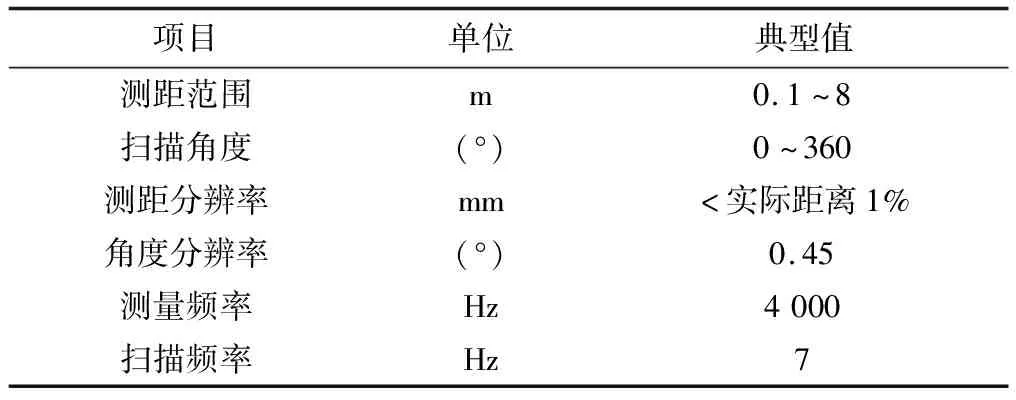
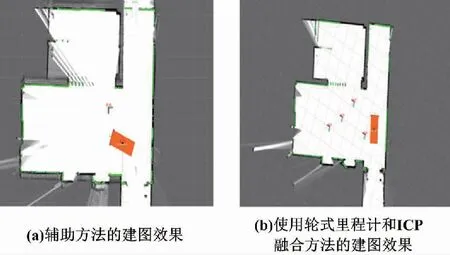
①利用拉格朗日插值法得到一條直線L1,而l (1) (2) (3) ②用分段線性插值函數(shù)對(duì)二次曲線進(jìn)行近似。 首先按照分割時(shí)間分段,然后對(duì)每個(gè)時(shí)間分段里面的激光點(diǎn)進(jìn)行線性插值[4],從而得出該分段中每個(gè)激光點(diǎn)在激光雷達(dá)坐標(biāo)系下對(duì)應(yīng)的里程計(jì)的位姿。 在ts、te時(shí)間段內(nèi),一共取k個(gè)位姿{(lán)Ps,Ps+1,...,Ps+k-2,Pe}。k個(gè)位姿通過線性插值獲取。在這k個(gè)位姿之間進(jìn)行拉格朗日線性插值。 設(shè)Ps、Ps+1之間有N個(gè)位姿{(lán)Ps,Ps+1,Ps+2,...,Ps+N-2,Ps+1},則: (4) ③坐標(biāo)系的轉(zhuǎn)換。 根據(jù)步驟②,可以求出每個(gè)激光點(diǎn)對(duì)應(yīng)的位姿Pi。設(shè)x′i為轉(zhuǎn)換之后的坐標(biāo)、xi為轉(zhuǎn)換之前的坐標(biāo),則: (5) (6) (7) 上述輪式里程計(jì)方法采用的是位置線性假設(shè),位置誤差的線性假設(shè)比位置假設(shè)更加合理。因此,本文提出了融合的方法,即將輪式里程計(jì)方法和ICP方法進(jìn)行融合。 融合算法的步驟如下。 ①用輪式里程計(jì)輔助方法去除運(yùn)動(dòng)信息中絕大部分的運(yùn)動(dòng)畸變。 ②用ICP方法進(jìn)行匹配,把匹配的結(jié)果作為正確值,將得到的里程計(jì)誤差值假設(shè)是線性分布的。 ③把匹配得到的誤差值平均到每一個(gè)激光點(diǎn)上,重新進(jìn)行激光點(diǎn)的修正。 ④進(jìn)行ICP匹配方法的迭代,直到收斂為止。 ICP方法原理如下。 給定兩個(gè)點(diǎn)云集合X,P,X為參考幀,P為當(dāng)前幀的點(diǎn)云[5]。 (8) 式中:xi和pi為點(diǎn)云的坐標(biāo);Nx和Np為點(diǎn)云的數(shù)量[6]。 (9) 求解三維旋轉(zhuǎn)矩陣R和平移向量t,使得誤差E(R,t)達(dá)最小。 分別計(jì)算兩組點(diǎn)云的質(zhì)心: (10) 對(duì)兩組點(diǎn)云去質(zhì)心: (11) 要使E(R,t)取最小值,t=μx-R×μp,則: (12) (13) 試驗(yàn)使用的激光雷達(dá)選用FLASH LIDIR F4型號(hào),其性能參數(shù)如表1所示。 表1 FLASH LIDIR F4激光雷達(dá)性能參數(shù) 為了驗(yàn)證激光雷達(dá)運(yùn)動(dòng)畸變?nèi)コ惴▽?duì)同步定位與地圖構(gòu)建(simultaneous localization and mapping,SLAM)系統(tǒng)在實(shí)際環(huán)境中的影響[8],在機(jī)器人系統(tǒng)(robot operating system,ROS)平臺(tái)中通過其可視化界面(ROS visualization,RVIZ)觀察兩種算法所建的環(huán)境地圖。智能小車移動(dòng)的線速度設(shè)置為0.7 m/s。 未去除畸變的建圖效果如圖1所示。 圖1 未去除畸變的建圖效果 試驗(yàn)結(jié)果如圖2所示。 圖2 試驗(yàn)結(jié)果 從圖1和圖2可以明顯看出,此時(shí)激光雷達(dá)所掃描得到的點(diǎn)云與原電梯間的地圖情形已經(jīng)偏移了一定的角度,說明此時(shí)激光雷達(dá)所掃描出來的數(shù)據(jù)產(chǎn)生了較大的畸變誤差。圖2(a)是使用輪式里程計(jì)輔助方法所構(gòu)建的圖,圖2(b)是使用輪式里程計(jì)和ICP方法融合的算法所構(gòu)建的圖。比較圖2(a)與圖2(b)可以看出,雖然兩種方法都可以有效去除激光雷達(dá)運(yùn)動(dòng)所產(chǎn)生的畸變,但是圖2(b)的地圖精度比圖2(a)的精度高。 綜上所述,當(dāng)智能小車在運(yùn)動(dòng)速率比較快的情況下,激光雷達(dá)所掃描出來的信息會(huì)發(fā)生畸變[9]。通過比較兩種算法的建圖效果,本文設(shè)計(jì)的激光雷達(dá)運(yùn)動(dòng)畸變?nèi)コ惴ㄌ岣吡薙LAM系統(tǒng)構(gòu)建環(huán)境地圖的精度。 針對(duì)激光雷達(dá)加速運(yùn)動(dòng)時(shí)產(chǎn)生的畸變[10],本文分析了激光雷達(dá)運(yùn)動(dòng)產(chǎn)生畸變的原因,并闡述了輪式里程計(jì)輔助方法去除激光雷達(dá)運(yùn)動(dòng)畸變的原理;分析了輪式里程計(jì)輔助方法的不足,針對(duì)位置線性假設(shè)沒有誤差線性假設(shè)合理的問題,最后提出了輪式里程計(jì)和ICP方法的融合的方法。在智能小車作室內(nèi)移動(dòng)時(shí),分別使用兩種算法進(jìn)行構(gòu)建環(huán)境地圖。試驗(yàn)結(jié)果表明,輪式里程計(jì)和ICP方法的融合方法比采用里程計(jì)輔助方法所構(gòu)建的環(huán)境地圖精度高。2 輪式里程計(jì)方法和ICP方法的融合



3 試驗(yàn)結(jié)果與分析
3.1 激光雷達(dá)性能參數(shù)
3.2 激光雷達(dá)運(yùn)動(dòng)畸變?nèi)コ囼?yàn)

4 結(jié)論
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
