模擬風力發電控制系統的設計
2021-06-17 12:42:10雷慧杰張艷偉葛峰
電子制作 2021年7期
關鍵詞:風速
雷慧杰,張艷偉,葛峰
(1.安陽工學院,河南安陽,455000;2.安陽鋼鐵集團公司,河南安陽,455000)
0 引言
風力發電技術是目前新能源中技術最成熟、最具有商業開發價值的一種發電方式之一[1],越來越多的國家已經注意到風電開發能夠緩解當前環境日益惡劣的現狀。結合當前我國節能減排的形式,開發研究風電是極具意義的。本文基于研旭風力發電仿真平臺,通過將風力發電機組的整套設備抽象成發電仿真平臺,以此來模擬直驅式風力發電系統,通過修改仿真系統的風速參數,獲取不同風速下的發電特性。
1 系統概述
實際的直驅式風力發電系統主要由風輪、永磁同步發電機、交直交變流器(背靠背連接)等組成[2]。風輪帶動發電機,從而發出三相交流電,三相交流電再通過PWM 整流器將交流電變為直流電,再通過PWM 逆變器將直流電逆變為三相交流電,再通過電感濾波,變壓器升壓后將并入主網。在仿真平臺系統中,風輪由異步電動機代替,通過變頻調速,從而模擬自然風變化的情況。
直驅式風力發電仿真平臺主要由主控臺、背靠背變流柜、風電仿真平臺組成。系統結構如圖1 所示。
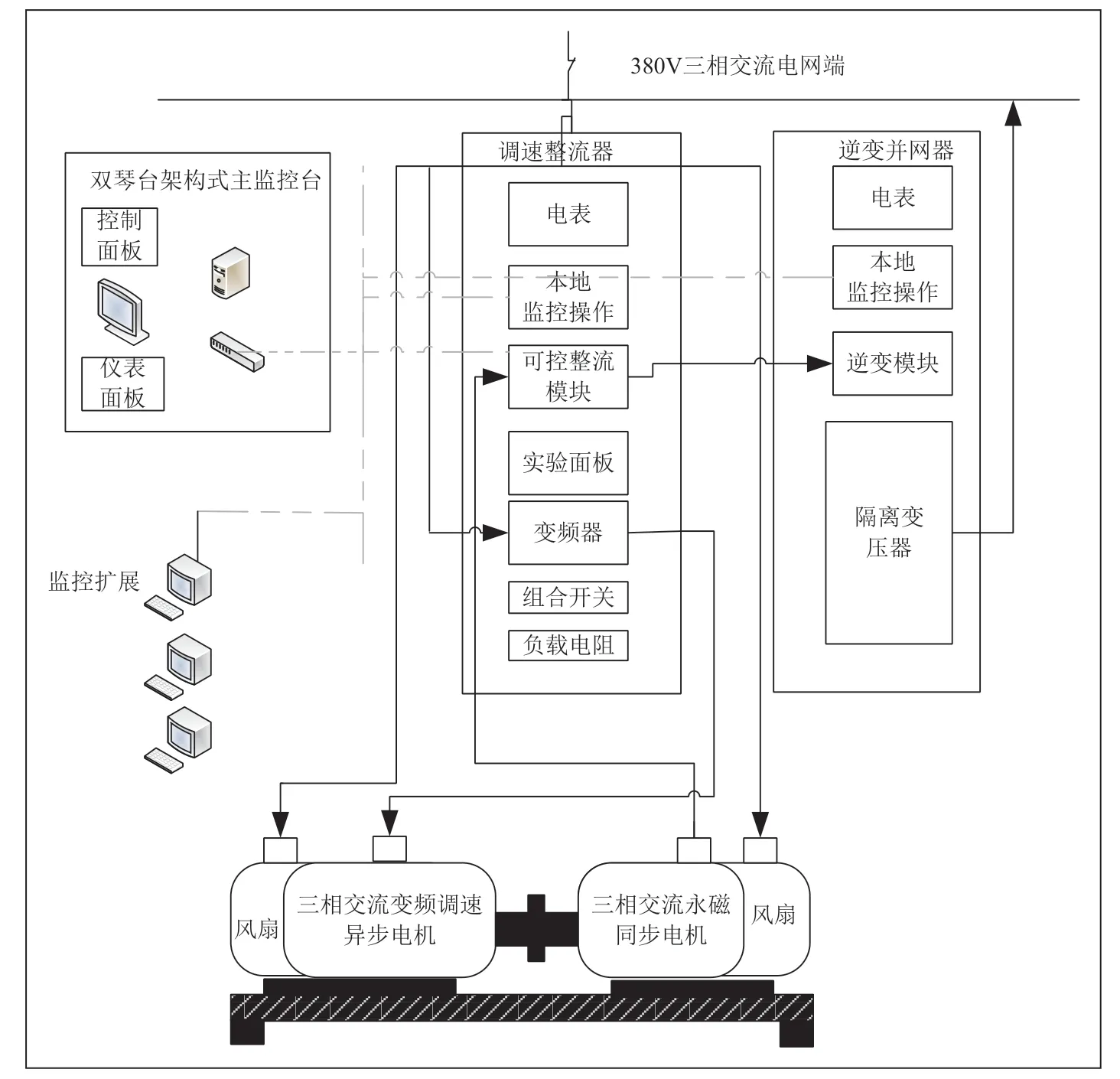
圖1 系統整體結構圖
2 系統原理
模擬風力發電是在研旭風力發電控制系統上進行,采用了三相異步電動機和永磁多極同步發電機(PMSWG)直接耦合直驅式風力發電系統,其原理如圖2 所示。
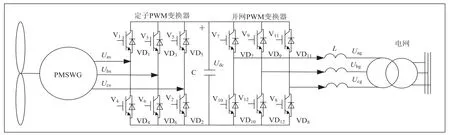
圖2 直驅式風力發電控制系統原理
PMSWG 產生的功率通過定子PWM 整流器整流成直流電,與中央DC 總線并聯的大電容器充當穩定的電壓和能量存儲緩沖器,通過并網的PWM 逆變器將直流電轉變成與電網相同的頻率的交流電并饋入電網,電網PWM逆變器和定子PWM 逆變器具有相同的結構。
3 雙PWM 變換器的基本工作原理
雙PWM 變換器可以根據需要以整流或逆變器模式運行,并且能量可以雙向流動。定子PWM變換器通常采用轉子磁鏈定向,同時將PMSWG 的定子電流控制為正弦波形,以實現轉速以及功率因數的調節;并網PWM 變換器使用電網電壓矢量定向將直流電轉換為對稱的正弦交流電,以實現并網和有功/無功解耦。
通過定子PWM 變換器或基于電網的PWM 變換器控制直流母線電壓,以保持高于電網幅度的穩定值,以便于將能量傳輸至電網(如圖3 所示)。如果定子PWM 變換器控制直流母線電壓,則與市電相連的PWM 變換器的任務是跟蹤最大風能,并且必須根據風速控制PMSWG 速度或與市電相連的電流。如果基于電網的PWM 變換器控制直流母線電壓,則定子PWM 變換器負責跟蹤最大風能。通常根據風速將PMSWG 速度控制為達到最佳速度。能量流通常從PMSWG 流向主電源,此時PMSWG 在正常發電模式下運行,但是當PMSWG 啟動時,能量可以從市電流向PMSWG,因此PMSWG 在電動狀態下能夠快速啟動。
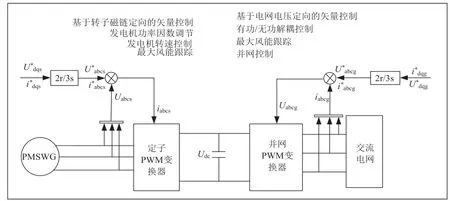
圖3 雙PWM 變換器的基本工作原理
4 永磁同步發電機的數學模型
■4.1 A-B-C 坐標系下的數學模型
電壓方程為:

其中,ua、ub和uc分別是定子三相繞組端電壓,Rs是定子繞組相電阻,ia、ib和ic分別為定子三相繞組電流,為微分算子,ψa、ψb和ψc分別為定子三相繞組的磁鏈。
轉矩方程為:

磁鏈方程為:
其中,Laa、Lbb和Lcc為各項繞組自感,且三者相等;Mx為各繞組之間的互感,公式中6 個相關量相等;ψf為永磁體磁鏈;θ為轉子N 極與a 相軸線夾角。
■4.2 α-β 坐標系下的數學模型
通過Clack 變換可以將A-B-C 坐標系下的模型轉換為α-β 坐標系下的數學模型。
電壓方程為:

其中,uα和uβ為定子電壓在α-β 軸分量;iα和iβ為定子電流在α-β 軸分量;ψ α和ψβ為定子磁鏈在α-β 軸分量。
磁鏈方程為:
其中,Ls為電感在α-β 軸分量;θ為轉子旋轉的電角速度。
轉矩方程:

其中,電機極對數p=4。
■4.3 d-q 坐標系下的數學模型
α-β 坐標系下的數學模型經過Park 變化可以轉換為d-q 坐標系下的數學模型。
電壓方程為:

其中,ud和uq為定子電壓在d-q 軸分量;id和iq為定子電流在d-q 軸分量;ψd和ψq為定子磁鏈在d-q 軸分量;為微分算子。
磁鏈方程為:

其中,Ld和Lq為電感在d-q 軸分量。
轉矩方程為:

由公式(9)可知轉矩有前半部分的電磁轉矩和后半部分的磁阻轉矩組成,而磁阻轉矩是由凸極效應所產生,本文采用的內置式永磁同步電機有Ld=Lq的關系,則有:

電機的運動方程為:

其中,TL為負載轉矩;J為轉動慣量;?r為轉子機械轉速。
5 軟件設計
■5.1 主程序設計
風力發電控制系統的整體程序框架如圖4 所示。當發出初始化指令后,PWM、AD、SCI、總線、GPIO 等中斷模塊進行初始化,初始化后判斷系統是否正常,如果正常進行啟動,若不正常再次初始化。當系統正常時開始啟動,系統判斷是否過壓/欠壓,若果過壓或者欠壓者啟動保護,當啟動系統保護時則禁止PWM 工作,如果正常則啟動標志位為有效,滿足串口發送條件,則啟動串口發送,并且最大功率跟蹤MPPT。
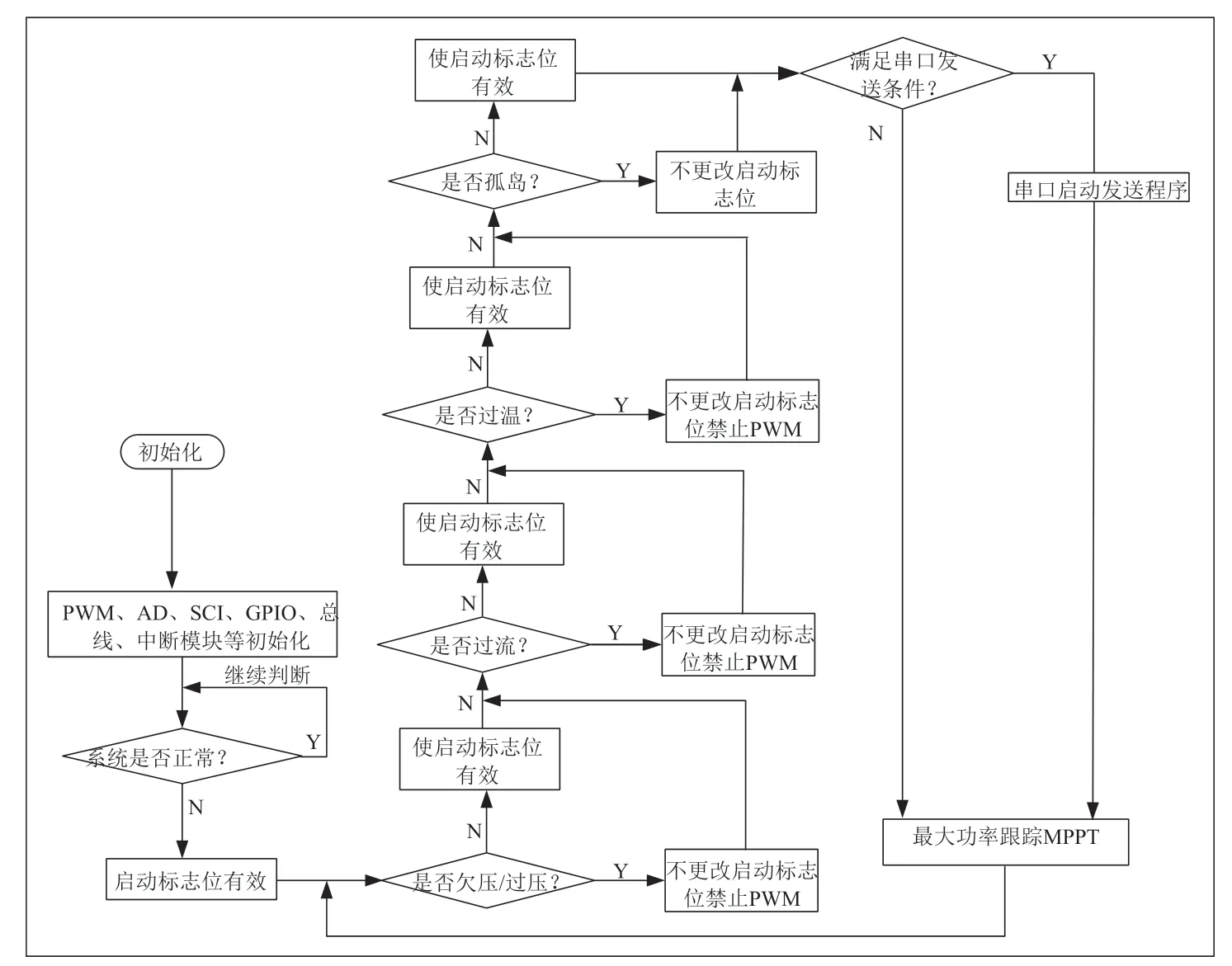
圖4 主程序流程圖
■5.2 SVPWM 算法
當內環電流Id和Iq經過PID 控制后輸出交流電壓矢量Vd和Vq,采用前饋解耦控制策略,Vd為:

Vd和Vq經過PARK 逆變換即可得到Uα和Uβ,從而確定開關管的導通時間,SVPWM 的算法流程圖如圖5 所示。
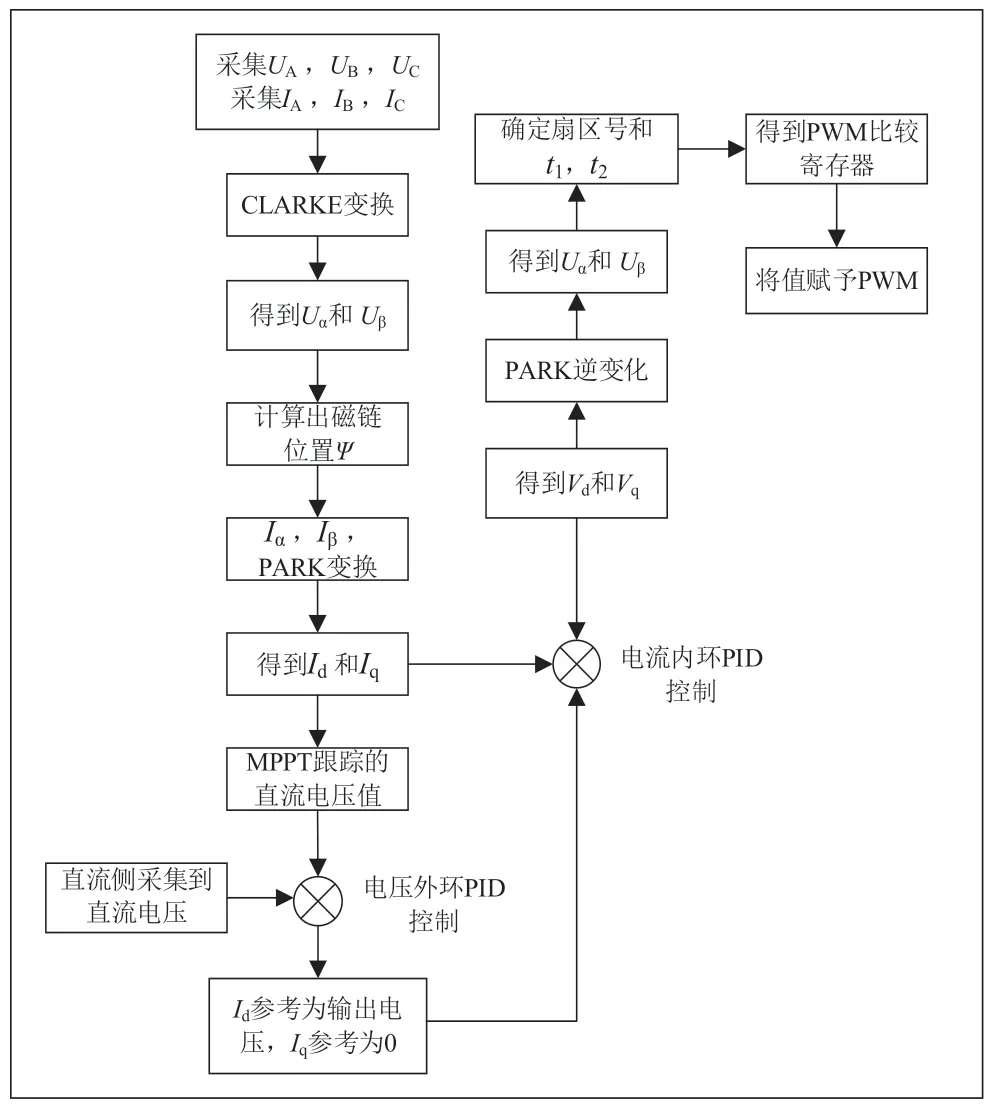
圖5
6 測試結果分析
依據上述模擬風力發電控制系統結構設計,在研旭風力發電控制系統仿真實驗平臺配置仿真參數,運行仿真軟件后,通過觀察記錄參數得到測試結果。
在上位機軟件安裝在主控臺的工控機中,打開“DirectDrivePlat”登陸,將整流器和逆變器全部開啟,當登陸成功后,出現如圖6 所示的主界面。
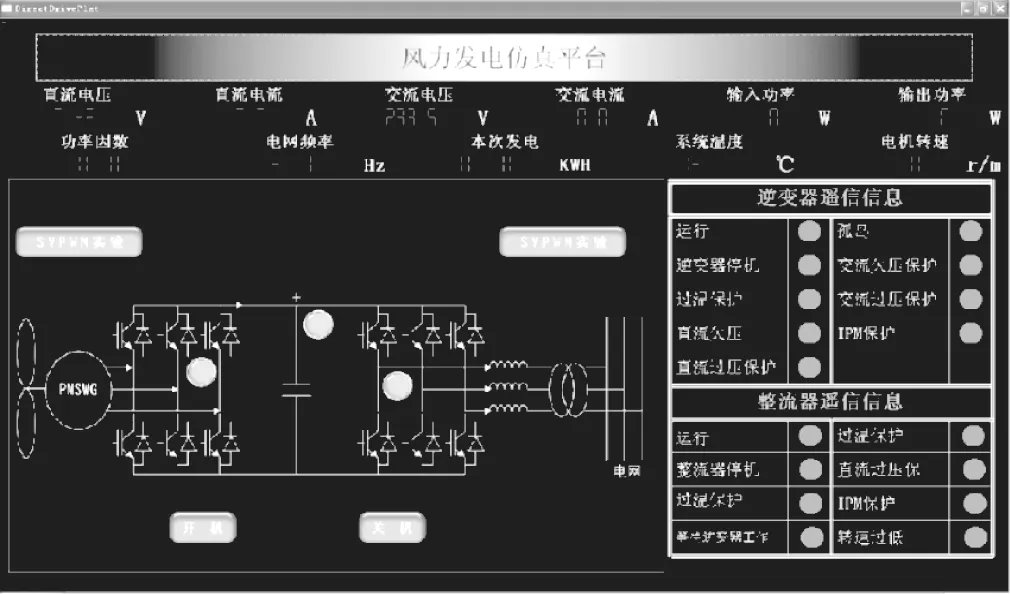
圖6 上位機軟件界面
經測試,發電機三相交流電流波形如圖7 所示,直流母線電壓、電流波形如圖8 所示,電網電壓、電流波形如圖9 所示。可以看出,系統功率因數接近1,并網電流諧波含量較小。

圖7 發電機三相電流波形圖
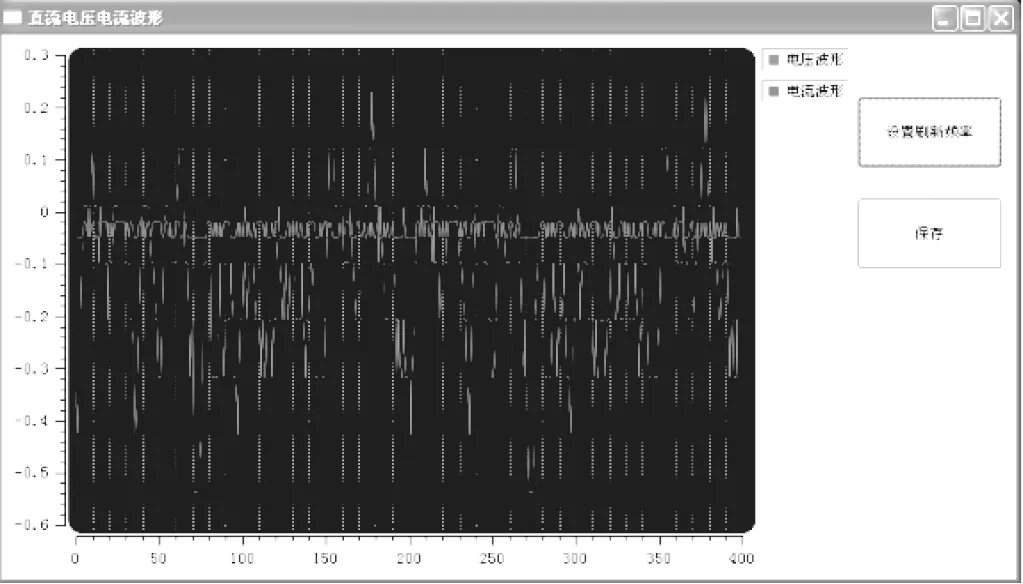
圖8 直流母線電壓、電流波形圖

圖9 電網電壓、電流波形圖
其功率曲線如圖10 所示,呈現周期性變化,從最小風速到最大風速其功率隨著風速增加而不斷增加,當達到最大功率后,又會返回到所設定的最小風速,再一次增加,以此不斷的循環。
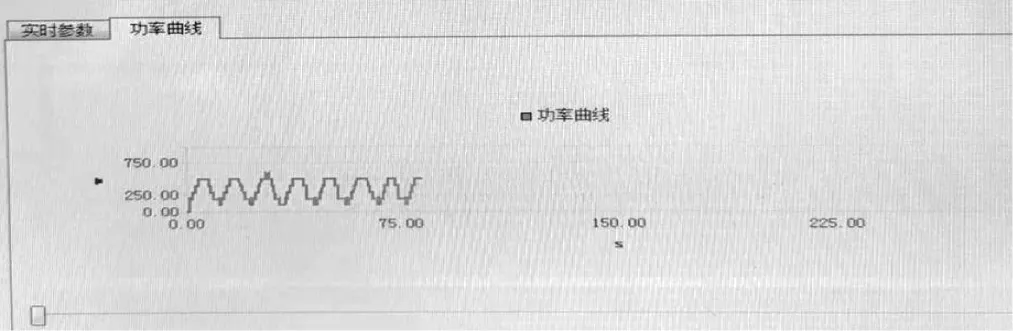
圖10 功率曲線
風機發電實時參數在隨著風速變化而不斷變化(如圖11 所示),當其電機轉速為377r/min 時,轉矩為7.9%,輸出頻率為16.60Hz,發電功率為0.2kW。
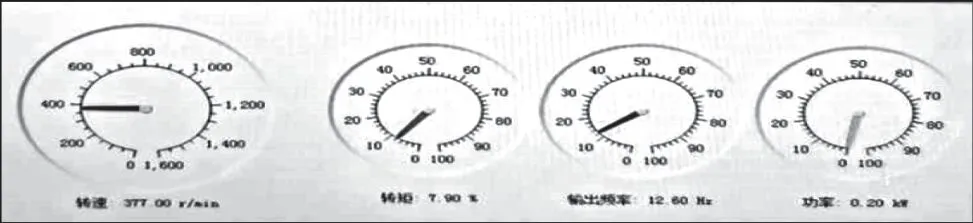
圖11 風機發電實時參數
7 結論
本文對模擬風力發電系統的控制策略進行了研究,對并在仿真平臺上進行了測試,結果表明并網電流呈現出較好的正弦波,基本實現風能最大跟蹤控制。
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31