輪轂電機驅動電動汽車3種構型的平順性分析
2021-06-16 04:22:20成林海周淑輝鄭玲玲王文竹
汽車工程學報 2021年3期
成林海,周淑輝,鄭玲玲,王文竹,2,趙 旗,李 杰
(1.吉林大學 汽車仿真與控制國家重點實驗室,長春 130025;2.沈陽航空航天大學 機電工程學院,沈陽 110136)
輪轂電機驅動電動汽車具有節能高效、環境友好和結構緊湊等優點[1],對單個車輪可以實現獨立控制[2],逐漸成為電動汽車的研究熱點之一。
為了在車輪內集成輪轂電機,在不改變懸架的情況下,提出輪轂電機驅動電動汽車3種構型[3]。構型1直接將輪轂電機裝入車輪內,輪轂電機與車輪之間剛性連接[4];構型2在構型1的基礎上引入吸振結構[5],吸收非簧載質量的振動;構型3在輪轂電機和車輪之間引入懸置結構[3],使輪轂電機變成簧載質量。
然而,將輪轂電機集成于車輪內,可能會導致非簧載質量增加,影響電動汽車的平順性[6],而平順性又直接影響乘員的舒適性和汽車的安全性[7]。
針對輪轂電機驅動電動汽車3種構型的平順性,國內外學者在降低非簧載質量[8]和抑制非簧載質量垂向振動[9]等方面開展了相應的研究工作。文獻[3]將3種構型與集中式驅動電動汽車的輪胎接地力的頻域波動變化進行了比較。文獻[10]將構型3的懸置結構變成主動懸置結構,通過加權系數的最優控制使主動懸置結構達到構型3的效果。文獻[11]將構型3的懸置結構參數非線性化,通過線性和非線性的模糊滑模控制確定懸置結構參數,并將模糊滑模控制的構型與構型3和構型1進行了對比。
以上研究既說明輪轂電機驅動電動汽車3種構型的重要性,也說明已有研究沒有根據平順性評價指標對3種構型進行分析。此外,車輛行駛時遇到的脈沖路面激勵會對輪轂電機驅動電動汽車平順性產生影響,已有研究沒有考慮這種影響,具有局限性。
針對上述問題,在前人研究的基礎上,通過描述隨機路面激勵和脈沖路面激勵,建立輪轂電機驅動電動汽車3種構型的振動模型,確定對應兩種路面激勵的平順性指標,分析輪轂電機驅動電動汽車3種構型隨機路面和脈沖路面的平順性,為輪轂電機驅動電動汽車平順性的進一步提高、優化和控制提供研究基礎。
1 兩種路面激勵描述
1.1 隨機路面激勵描述
采用濾波白噪聲法描述路面激勵,濾波白噪聲法將理想單位白噪聲作為輸入,隨機路面激勵作為輸出,兩者的關系如式(1)所示[12]:

式中:q為路面激勵,m;w(t)為零均值和單位功率密度的理想單位白噪聲;u為車速,m/s;nq=0.000 1為下截止空間頻率;n0=0.1為參考空間頻率;Gq(n0)為路面不平度系數,由標準的路面等級確定[13]。
國內路面等級現多為B級路面[13],在車速20 m/s和仿真時間5 s的條件下,B級隨機路面激勵的時域仿真結果,如圖1所示。

圖1 B級隨機路面時域仿真
為了說明獲得的隨機路面激勵的正確性,采用Welch算法對隨機路面激勵求取功率譜密度,并與標準功率譜密度曲線對比。將Matlab工具箱的Pwelch函數設定為單邊功率譜密度[14],實現Welch算法的隨機路面激勵的功率譜密度估計,如圖2所示。由圖2可知,建立的隨機路面激勵功率譜密度位于國標范圍內,說明隨機路面激勵生成的正確性。
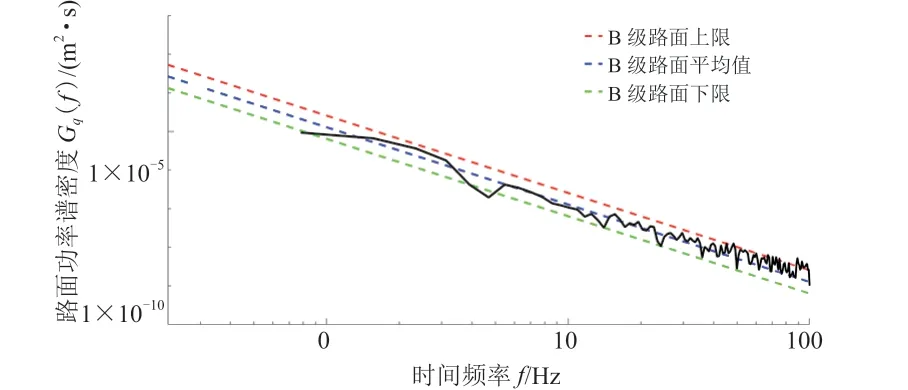
圖2 B級隨機路面功率譜密度
1.2 脈沖路面激勵描述
根據GB/T4970—2009《汽車平順性試驗方法》規定[15],采用三角形凸塊描述脈沖路面激勵如下:

式中:t0為車輛以速度u行駛到凸塊的時間,s;h為凸塊路面高度,m;l為凸塊的長度,m。
GB/T4970—2009規定的三角凸塊如圖3所示。其中,h=0.04 m,l=0.4 m。
2 三種構型的振動模型
2.1 三種構型的振動模型
構型1由簧載質量(車身)和非簧載質量(車輪)構成,如圖4a所示。其中,mb為簧載質量、mw為非簧載質量、md為輪轂電機質量、ks為懸架彈簧剛度,cs為懸架阻尼,kt為輪胎剛度,q為路面激勵,z2為車身位移,z1為車輪位移。
根據牛頓第二定律,構型1的振動模型可以描述為:



圖4 三種構型的振動模型
構型2在構型1的基礎上引入吸振結構,如圖4b所示。其中,kd為吸振結構剛度,cd為吸振結構阻尼,ma為吸振質量,za為吸振質量位移。
根據牛頓第二定律,構型2的振動模型可以描述為:

構型3在輪轂電機與車輪之間引入懸置結構,如圖4c所示。其中,kd為懸置結構的彈簧剛度,cd為懸置結構的阻尼,zd為輪轂電機位移。
根據牛頓第二定律,構型3的振動模型可以描述為:


2.2 平順性評價指標
對于輪轂電機驅動電動汽車的3種構型,平順性分析的常規振動響應量由簧載質量加速度..z2,懸架動撓度fd和車輪相對動載Fd組成。考慮到輪轂電機的引入,本文補充輪轂電機加速度..z1或..zd作為振動響應量。
對于3種構型,fd和Fd表示為:

式中:m為振動模型的總質量。
針對式(3)~(5),采用時域積分方法。例如,對Matlab中Runge-Kutta算法的ode45函數進行求解,可以得到各個時刻位移Zi、速度和加速度。再由式(6)和式(7)求得懸架動撓度fd和車輪相對動載Fd。
隨機路面的平順性評價指標由各個振動響應量的均方根表示,即

式中:x為振動響應量的均方根值;xi為振動響應量各個時刻的值。
脈沖路面的平順性評價指標由各個振動響應量的絕對值最大值表示,即

3 平順性分析
3.1 分析方案
為了分析3種構型的平順性,根據前面的理論分析,采用Matlab/Simulink開發程序分別對3種構型B級隨機路面和脈沖路面的平順性進行仿真。仿真所需的參數取自文獻[3],見表1。

表1 仿真所需參數
3.2 隨機路面平順性分析
針對B級路面,車速以1 km/h的增量由5 km/h變化到80 km/h,仿真時間5 s,各個平順性評價指標如圖5所示。
由圖5可知:


圖5 隨機路面平順性指標對比
(1)對于簧載質量加速度均方根值,構型2和構型3小于構型1,構型2相對于構型1的簧載質量加速度均方根值的均值減小0.095 m/s2,構型3相對于構型1的簧載質量加速度均方根值的均值減小0.102 m/s2。
(2)對于懸架動撓度均方根值,構型2和構型3小于構型1,但是減小幅度不大,構型2相對于構型1的懸架動撓度均方根值的均值減小0.061 mm,構型3相對于構型1的懸架動撓度均方根值的均值減小0.179 mm。
(3)對于車輪相對動載均方根值,構型2和構型3小于構型1,構型2相對于構型1車輪相對動載均方根值的均值減小0.033 2,構型3相對于構型1車輪相對動載均方根值的均值減小0.047 0。
(4)對于電機加速度均方根值,構型2和構型3小于構型1,構型2相對于構型1輪轂電機加速度均方根值的均值減小2.35 m/s2,構型3相對于構型1輪轂電機加速度均方根值的均值減小5.06 m/s2。
由以上分析可知,相對于構型1,構型2和構型3降低了輪轂電機驅動電動汽車隨機路面平順性的所有評價指標,構型3好于構型2,構型2好于構型1。
3.3 脈沖路面平順性分析
針對脈沖路面,車速以1 km/h的增量由10 km/h變化到60 km/h,仿真時間5 s,各個平順性評價指標,如圖6所示。

圖6 脈沖路面平順性指標對比
由圖6可知:
(1)對于簧載質量加速度絕對值最大值,構型2小于構型1,構型2相對于構型1簧載質量加速度絕對值最大值的均值減小1.74 m/s2。速度小于37 km/h時,構型3小于構型1;速度大于37 km/h時,構型3大于構型1。構型3相對于構型1簧載質量加速度絕對值最大值的均值減小0.77 m/s2。
(2)對于懸架動撓度絕對值最大值,構型2小于構型1,構型2相對于構型1懸架動撓度絕對值最大值的均值減小3.281 mm。速度小于47 km/h時,構型3小于構型1;速度大于47 km/h時,構型3稍大于構型1。構型3相對于構型1懸架動撓度絕對值最大值的均值減小2.011 mm。
(3)對于車輪相對動載絕對值最大值,構型2和構型3小于構型1,構型2相對于構型1車輪相對動載絕對值最大值的均值減小0.353 5,構型3相對于構型1車輪相對動載絕對值最大值的均值減小0.554 0。
(4)對于電機加速度絕對值最大值,構型2和構型3小于構型1,構型2相對于構型1電機加速度絕對值最大值的均值減小22.09 m/s2,構型3相對于構型1電機加速度絕對值最大值的均值減小85.59 m/s2。
由以上分析可知,相對于構型1,構型2和構型3總體上降低了輪轂電機驅動電動汽車脈沖路面平順性的所有指標,對于簧載質量加速度和懸架動撓度的影響不同,構型2好于構型3,構型3好于構型1;對于車輪相對動載和輪轂電機加速度,構型3好于構型2,構型2好于構型1。
4 結論
針對輪轂電機驅動電動汽車3種構型的平順性,給出隨機路面激勵和脈沖路面激勵模型,分別建立了適用于兩種路面激勵的3種構型的振動模型,確定了隨機路面和脈沖路面的平順性評價指標,針對兩種路面激勵通過仿真對比了3種構型的平順性評價指標。
研究結果表明,針對隨機路面平順性,構型2和構型3都優于構型1,且構型3更好;針對脈沖路面平順性,構型2和構型3都優于構型1,對于簧載質量加速度和懸架動撓度指標,構型2和構型3優于構型1,且構型2更好,對于輪轂電機加速度和車輪相對動載指標,構型2好于構型3,且構型3更好。
