基于多傳感器融合的復(fù)雜越野環(huán)境人員識別方法
2021-06-16 04:23:52劉英哲范晶晶李志鵬郭建英
汽車工程學(xué)報 2021年3期
關(guān)鍵詞:融合
劉英哲,范晶晶,李志鵬,郭建英
(1.北方工業(yè)大學(xué) 城市道路交通智能控制技術(shù)北京重點(diǎn)實(shí)驗室,北京 100144;2.中國北方發(fā)動機(jī)研究所,天津 300405;3.順德中專學(xué)校,廣東,佛山 528300)
軍用無人車輛的一大應(yīng)用場景就是班組伴隨、跟隨士兵,減輕班組成員的負(fù)荷,可以從整體上提升班組的戰(zhàn)斗能力。實(shí)時、準(zhǔn)確并且可靠地檢測出車輛周邊的人員,是班組伴隨自動駕駛實(shí)現(xiàn)的前提,行之有效的人員檢測技術(shù)能夠幫助班組伴隨無人駕駛車輛實(shí)現(xiàn)自動跟隨功能。
由于激光雷達(dá)和攝像頭原理不同,受環(huán)境影響的特點(diǎn)也不盡相同,采用單一傳感器對人員進(jìn)行檢測,難以適應(yīng)復(fù)雜的環(huán)境,所以大都采用多傳感器融合的方式。在激光雷達(dá)和攝像頭融合領(lǐng)域,PREMEBIDA等[1-6]通過不同方法配置的圖像數(shù)據(jù)和激光雷達(dá)點(diǎn)云數(shù)據(jù)訓(xùn)練得到自適應(yīng)人員檢測器。PONZ等[7-14]通過聯(lián)合概率數(shù)據(jù)關(guān)聯(lián)方法對激光雷達(dá)、攝像頭以及慣性傳感器等的靜態(tài)信息和在線信息進(jìn)行數(shù)據(jù)關(guān)聯(lián),以達(dá)到檢測人員的目的。在毫米波雷達(dá)和攝像頭融合領(lǐng)域,徐偉等[15-16]基于圖像的HOG特征和SVM分類方法以及毫米波雷達(dá)的快速容差中頻匹配算法,設(shè)計了多傳感器融合的行人識別算法,但由于HOG特征本身的局限性,行人識別率相對較低。
本文針對自動駕駛車輛對于復(fù)雜環(huán)境下人員識別的需求,將攝像頭和激光雷達(dá)作為感知設(shè)備,針對激光雷達(dá)采用基于KDTree加速的歐式聚類方法,針對攝像頭設(shè)計改進(jìn)YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)架構(gòu),最后設(shè)計空間融合識別算法,旨在增加人員識別的準(zhǔn)確率。通過理論計算和理論分析,結(jié)合本文所設(shè)計的微型履帶式車輛驗證平臺,在復(fù)雜環(huán)境下進(jìn)行多工況實(shí)車試驗。試驗結(jié)果表明,所設(shè)計的多傳感器融合人員識別算法能夠準(zhǔn)確識別環(huán)境中的人員目標(biāo),在復(fù)雜環(huán)境下識別率良好。
1 系統(tǒng)構(gòu)成
復(fù)雜環(huán)境下融合激光雷達(dá)與攝像頭的人員識別系統(tǒng),如圖1所示。
圖1中,通過以太網(wǎng)接口和激光雷達(dá)驅(qū)動程序獲得激光雷達(dá)三維點(diǎn)云數(shù)據(jù),隨后應(yīng)用基于KDTree的歐式聚類算法對激光雷達(dá)三維點(diǎn)云數(shù)據(jù)進(jìn)行歐式分割和聚類[17],得到若干個人員候選點(diǎn)云區(qū)域。通過像素坐標(biāo)系到世界坐標(biāo)系的映射關(guān)系和激光雷達(dá)坐標(biāo)系到世界坐標(biāo)系的映射關(guān)系,可得到激光雷達(dá)坐標(biāo)系到像素坐標(biāo)系的映射關(guān)系,結(jié)合空間尺度融合算法將若干個人員候選點(diǎn)云區(qū)域分別映射到像素坐標(biāo)系,并通過改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)架構(gòu)識別出真正包含人員的區(qū)域,并通過矩形框的形式給出各個人員在像素坐標(biāo)系下的具體坐標(biāo)位置,最后通過人員身份判別準(zhǔn)則判定環(huán)境中人員是否存在、數(shù)量和位置等相關(guān)信息。
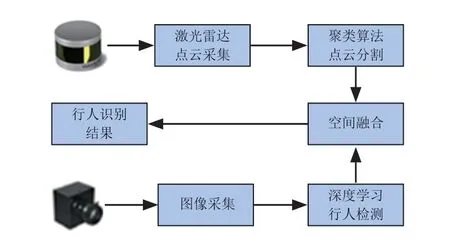
圖1 融合激光雷達(dá)與攝像頭的人員識別系統(tǒng)
2 方法設(shè)計
2.1 改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)架構(gòu)
為了進(jìn)一步提升YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)在復(fù)雜環(huán)境背景下對目標(biāo)物體的識別性能,結(jié)合當(dāng)前深度學(xué)習(xí)領(lǐng)域的熱點(diǎn)研究成果,本文提出了一種改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)結(jié)構(gòu),如圖2所示。
圖2中,改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)結(jié)構(gòu)與原始YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)結(jié)構(gòu)的差別主要體現(xiàn)在殘差模塊Residual Block的設(shè)計上。原始YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)中,殘差模塊RB的輸入經(jīng)過兩個CBL模塊處理后的信號再與RB模塊的輸入作相加的操作,得到的結(jié)果便是RB模塊的輸出。改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)中,在原始YOLO v3網(wǎng)絡(luò)RB輸出的基礎(chǔ)上增加了全局池化層、兩個全連接層、Sigmoid激活函數(shù)層和乘法層。具體來說,原始YOLO v3網(wǎng)絡(luò)RB輸出,經(jīng)過全局池化層、全連接層、全連接層和Sigmoid激活函數(shù)層操作后,再與原始YOLO v3網(wǎng)絡(luò)RB輸出的結(jié)果相乘,得到改進(jìn)后的殘差模塊輸出。圖3中,3個輸出通道y1、y2和y3的深度均為255,這是針對COCO數(shù)據(jù)集時的結(jié)果。改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)中,針對每一個網(wǎng)格單元進(jìn)行預(yù)測時都會得到3個矩形框,每個矩形框有左上角橫坐標(biāo)、左上角縱坐標(biāo)、寬度、高度和置信度等5個參數(shù),同時由于COCO數(shù)據(jù)集有80種目標(biāo)類型,因此,每個矩形框還必須包含這80種目標(biāo)的概率,因此,輸出通道y1、y2和y3的深度為3×(5+80)=255。對于包含n種目標(biāo)類型的任意數(shù)據(jù)集來說,輸出通道y1、y2和y3的深度dep可由式(1)來進(jìn)行計算。

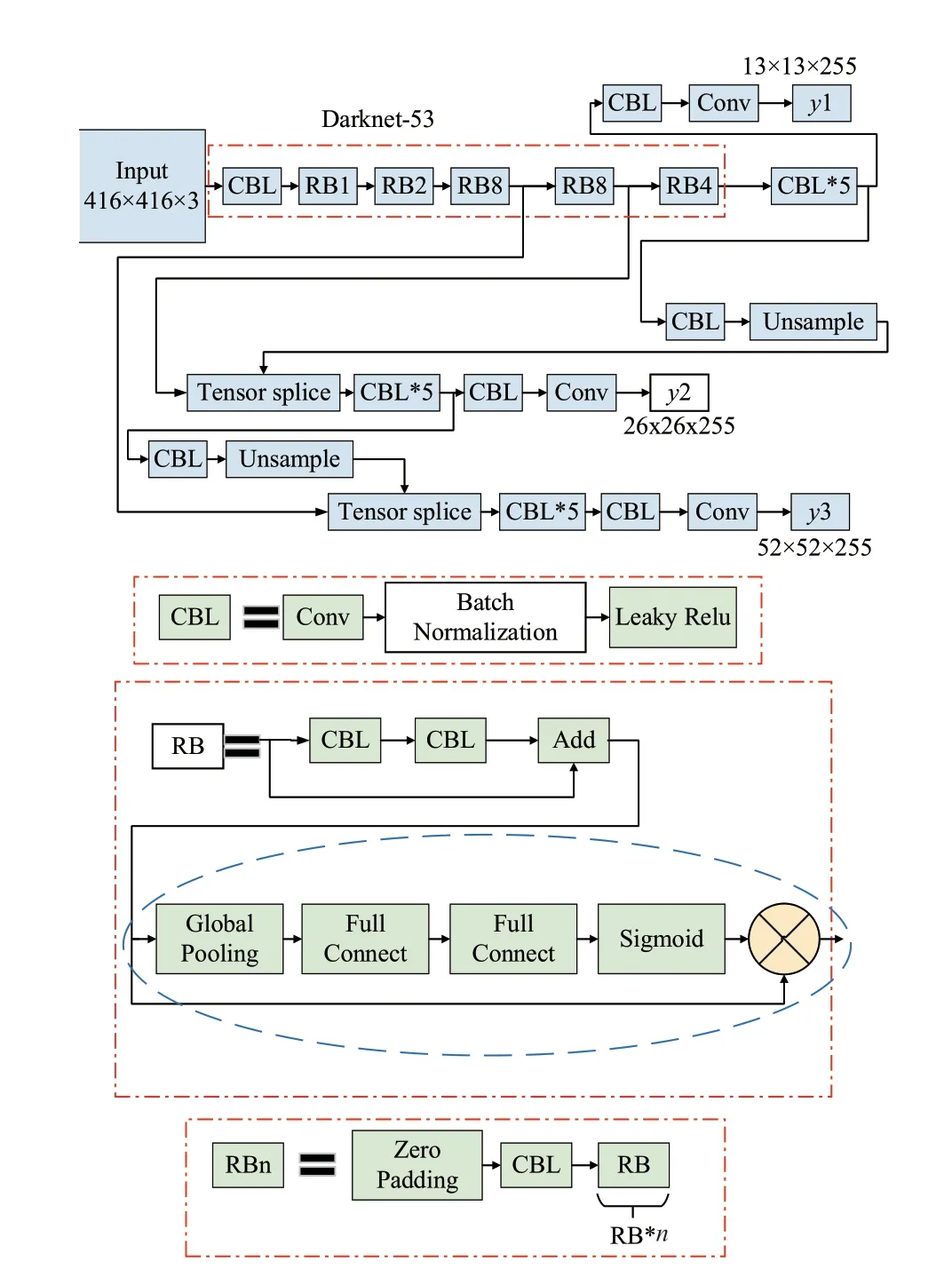
圖2 改進(jìn)殘差模塊的YOLO v3網(wǎng)絡(luò)結(jié)構(gòu)
與原始YOLO v3網(wǎng)絡(luò)相比,改進(jìn)殘差模塊的YOLO v3網(wǎng)絡(luò)在深度上明顯更勝一籌,增加了(1+2+8+8+4)=23個全局池化層,增加了2 ×(1+2+8+8+4)=46個全連接層,增加了(1+2+8+8+4)=23個Sigmoid激活函數(shù)層,增加了(1+2+8+8+4)=23個乘法層,所有網(wǎng)絡(luò)層數(shù)等于255+23+46+23+23=370個。相比于原始YOLO v3網(wǎng)絡(luò),網(wǎng)絡(luò)層數(shù)增加了(370-255)/255=45.1%,網(wǎng)絡(luò)層數(shù)量提升效果明顯。
改進(jìn)殘差模塊的YOLO v3網(wǎng)絡(luò)層數(shù)量分布見表1。
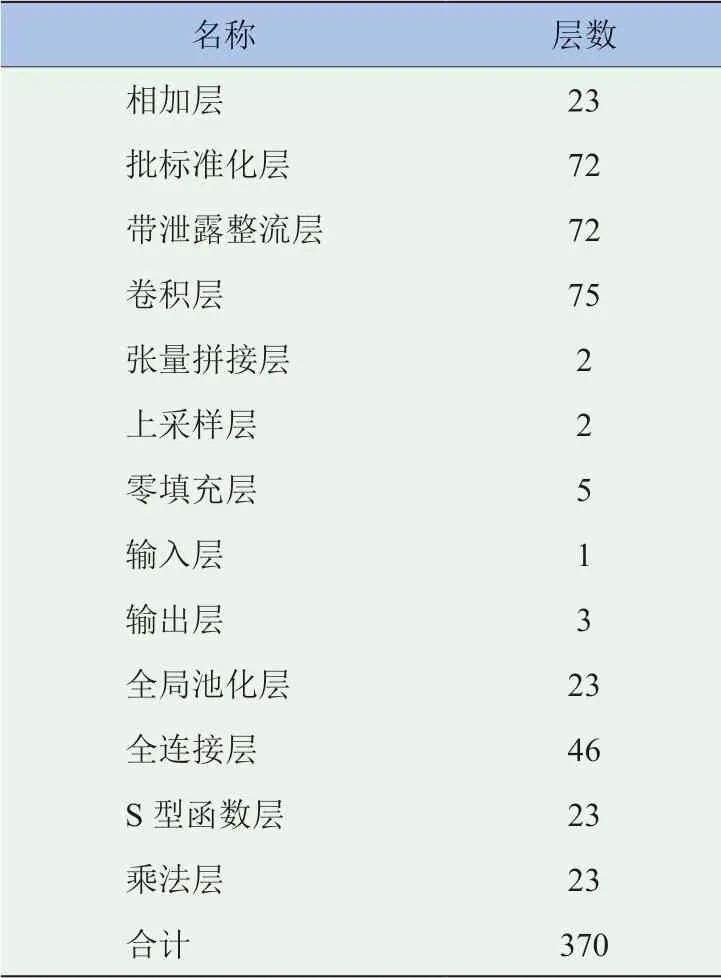
表1 改進(jìn)殘差模塊的YOLO v3網(wǎng)絡(luò)層數(shù)量分布
2.2 空間尺度融合
假定激光雷達(dá)相對于世界坐標(biāo)系的俯仰角為θL,激光雷達(dá)相對于世界坐標(biāo)系的方向角為φL,激光雷達(dá)相對于世界坐標(biāo)系的側(cè)傾角為ψL,激光雷達(dá)相對于世界坐標(biāo)系原點(diǎn)的高度為hL,激光雷達(dá)相對于世界坐標(biāo)系原點(diǎn)的橫向距離為dL,激光雷達(dá)相對于世界坐標(biāo)系原點(diǎn)的縱向距離為lL。激光雷達(dá)坐標(biāo)系和世界坐標(biāo)系的位置關(guān)系如圖3所示。
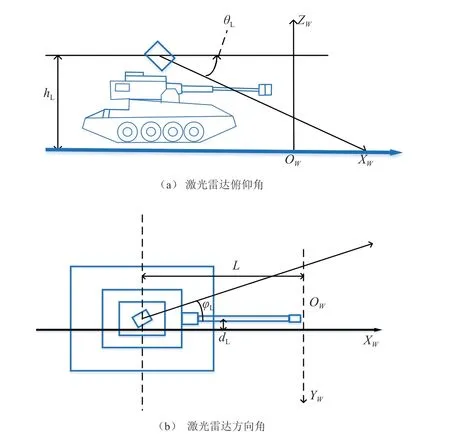
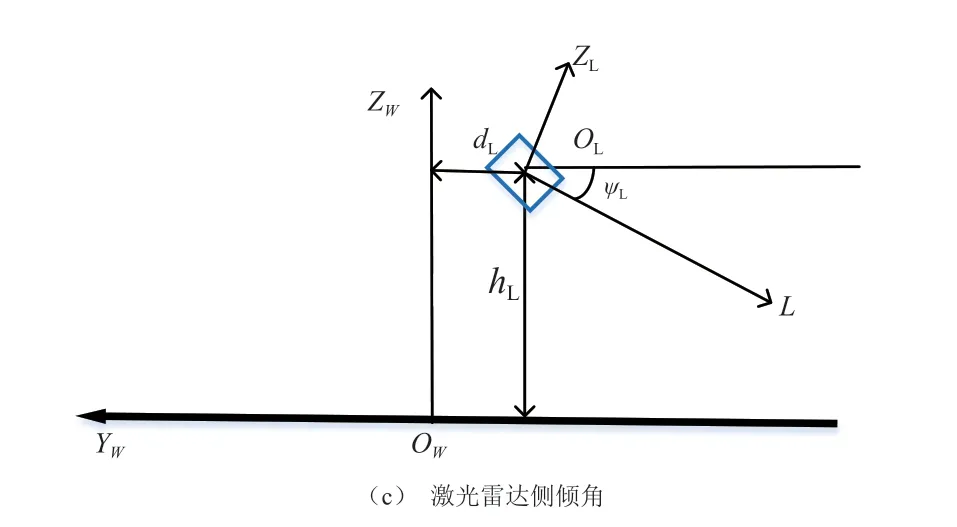
圖3 激光雷達(dá)和世界坐標(biāo)系的位置關(guān)系
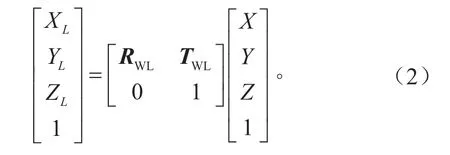
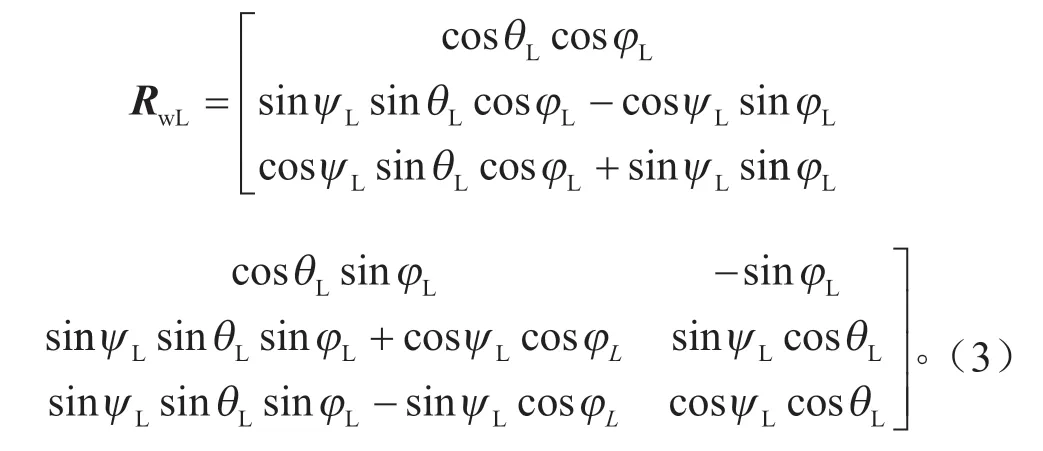
根據(jù)激光雷達(dá)坐標(biāo)系和世界坐標(biāo)系之間的旋轉(zhuǎn)和平移關(guān)系可得世界坐標(biāo)系到激光雷達(dá)坐標(biāo)系的映射關(guān)系,如式(2)所示。
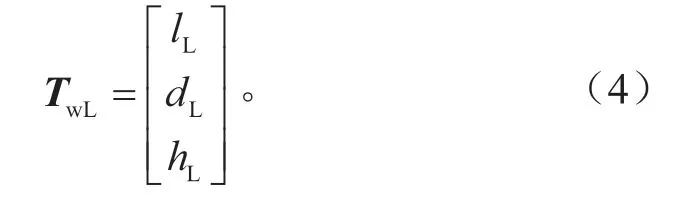
TwL的表達(dá)式為:
假定攝像機(jī)相對于世界坐標(biāo)系的俯仰角為θ,攝像機(jī)相對于世界坐標(biāo)系的方向角為φ,攝像機(jī)相對于世界坐標(biāo)系的側(cè)傾角為ψ,攝像機(jī)相對于世界坐標(biāo)系原點(diǎn)的高度為h,攝像機(jī)相對于世界坐標(biāo)系原點(diǎn)的橫向距離為d,攝像機(jī)相對于世界坐標(biāo)系原點(diǎn)的縱向距離為l。根據(jù)攝像機(jī)坐標(biāo)系和世界坐標(biāo)系之間的旋轉(zhuǎn)和平移關(guān)系以及像素坐標(biāo)系與相機(jī)坐標(biāo)系之間的映射關(guān)系,可得世界坐標(biāo)系到像素坐標(biāo)系的映射關(guān)系,如式(5)所示。

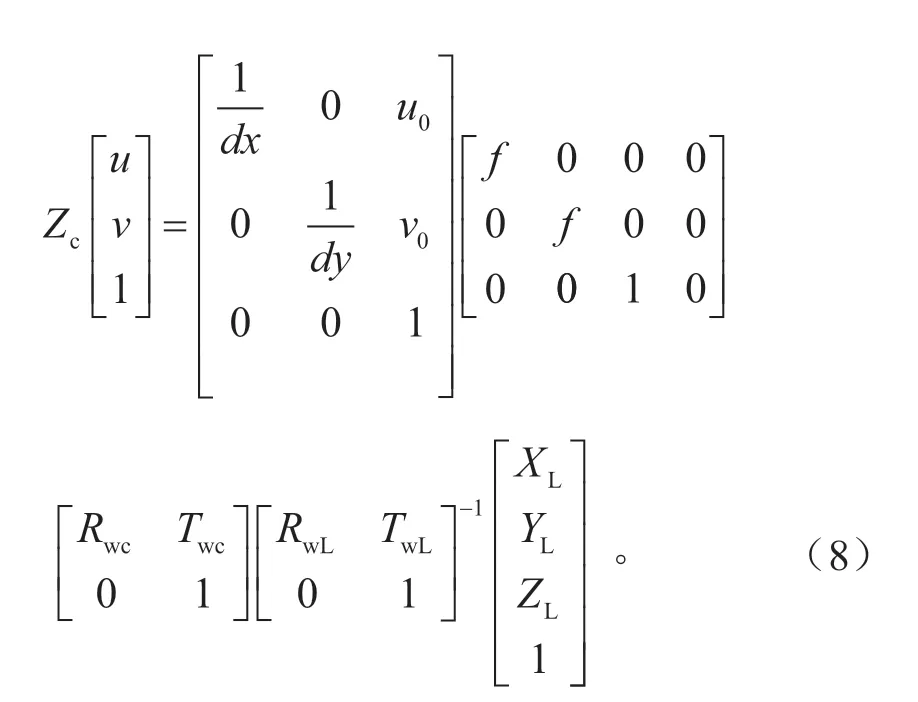
式中:Zc為三維坐標(biāo)系壓縮至二維像素坐標(biāo)系的變換因子;(u,v)為像素坐標(biāo)系下的坐標(biāo);f為相機(jī)的焦距;dx為每個像素在圖像坐標(biāo)系u坐標(biāo)軸方向上的尺寸;dy為每個像素在圖像坐標(biāo)系v坐標(biāo)軸方向上的尺寸。世界坐標(biāo)系到相機(jī)坐標(biāo)系的旋轉(zhuǎn)矩陣Rwc的表達(dá)式為:
世界坐標(biāo)系到相機(jī)坐標(biāo)系的平移矩陣Twc的表達(dá)式為:
結(jié)合上文推導(dǎo)的世界坐標(biāo)系到像素坐標(biāo)系的映射關(guān)系以及世界坐標(biāo)系到激光雷達(dá)坐標(biāo)系的映射關(guān)系,可得激光雷達(dá)坐標(biāo)系到像素坐標(biāo)系的轉(zhuǎn)換關(guān)系,如式(8)所示。根據(jù)式(8),可以完成激光雷達(dá)和攝像頭在空間尺度上的融合。
3 試驗驗證
為了驗證所設(shè)計的基于攝像頭圖像的深度學(xué)習(xí)網(wǎng)絡(luò)結(jié)構(gòu)以及激光雷達(dá)和攝像頭融合算法在復(fù)雜環(huán)境下對于人員識別的效果,搭建了如圖4所示的履帶式車輛驗證平臺。

圖4 履帶式車輛驗證平臺
圖4中,攝像頭遵循標(biāo)準(zhǔn)UVC協(xié)議(USB Video Class Protocol),其技術(shù)參數(shù)見表2。
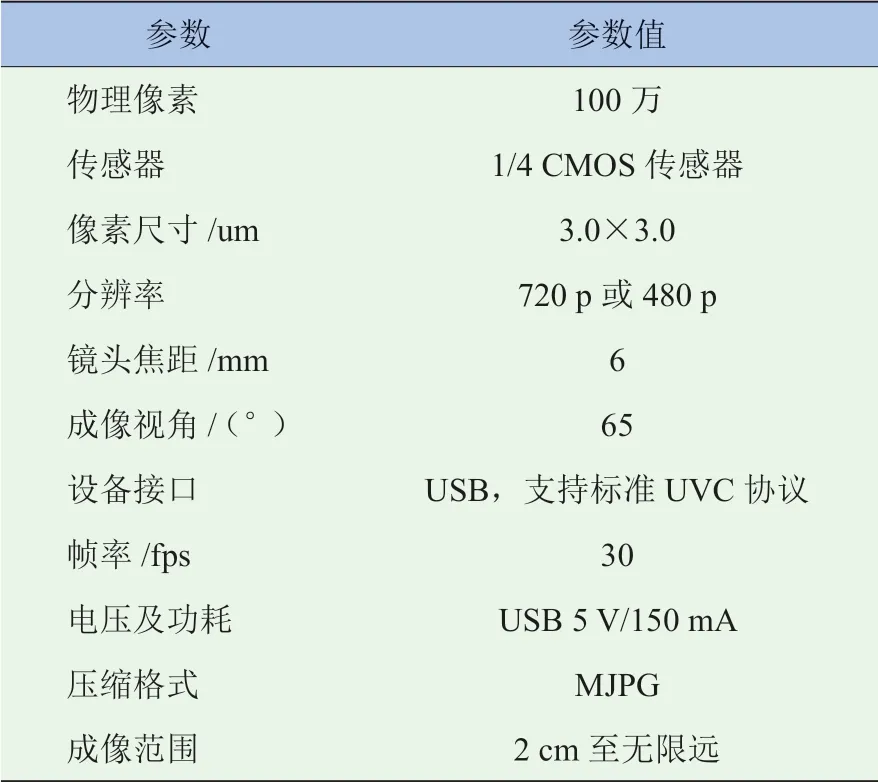
表2 攝像頭技術(shù)參數(shù)
試驗環(huán)境選擇為非結(jié)構(gòu)化道路的復(fù)雜野外環(huán)境,該環(huán)境中包含有凹凸不平的草地、數(shù)目眾多且與人員高度相近的樹木、高壓線塔以及高度不等的建筑物等,將試驗工況劃分為單人工況和雙人工況。針對所設(shè)計的單人工況和雙人工況分別進(jìn)行實(shí)車試驗,可以得到各種工況下傳感器融合的識別結(jié)果。
3.1 單人識別工況
單人工況融合識別結(jié)果如圖5所示。由圖5可知,攝像頭的圖像標(biāo)注結(jié)果中,紅色矩形框除了標(biāo)注了目標(biāo)的類型為person,目標(biāo)類型為person的概率為1.00,目標(biāo)與試驗車輛前部的距離為10.3 m以外,還有一個LC的標(biāo)簽。LC是LiDAR Confirmed的縮寫,代表紅色矩形框內(nèi)的人員目標(biāo)已經(jīng)得到了激光雷達(dá)的確認(rèn),說明激光雷達(dá)和攝像頭的融合是有效果的。具體融合準(zhǔn)則的運(yùn)行和判斷是在后臺的終端中完成的,具體計算過程如下:
(1)激光雷達(dá)測量距離與攝像頭測量距離之間的誤差為:|9.88-10.3|/9.88=4.25%,在誤差容許范圍之內(nèi)。(2)攝像頭給出目標(biāo)為person的置信度為1.00,該置信度已經(jīng)達(dá)到最大值,符合設(shè)計要求。(3)激光雷達(dá)三維點(diǎn)云數(shù)據(jù)中人員目標(biāo)的高寬比計算值為1.21,攝像頭識別到的人員目標(biāo)矩形框的高寬比為(384-154)/(319-237)=2.8,二者的計算值均在合理范圍之內(nèi),符合設(shè)計要求。(4)激光雷達(dá)識別到的人員點(diǎn)云映射到像素坐標(biāo)系后,得到的矩形框與攝像頭識別到的人員矩形框交并比的計算值為95.4%,達(dá)到了95%以上,符合設(shè)計要求。

圖5 單人工況融合識別結(jié)果
3.2 雙人識別工況
雙人工況融合識別結(jié)果如圖6所示。由圖6可知,攝像頭的圖像識別結(jié)果中,紅色矩形框除了標(biāo)注了兩個目標(biāo)的類型均為person,兩個目標(biāo)為person的概率均為1.00,左側(cè)人員目標(biāo)與試驗車輛前部的距離為8.3 m,右側(cè)人員目標(biāo)與試驗車輛前部的距離為8.5 m以外,在兩個人員目標(biāo)上均有LC的標(biāo)簽,代表兩個紅色矩形框內(nèi)的人員目標(biāo)都已經(jīng)得到了激光雷達(dá)的確認(rèn),說明激光雷達(dá)和攝像頭的融合是有效果的。具體融合準(zhǔn)則的運(yùn)行和判斷是在后臺的終端中完成的,過程如下:
(1)激光雷達(dá)測量距離與攝像頭測量距離之間的誤差為:左側(cè)人員目標(biāo)|7.89-8.3|/7.89=5.20%,右側(cè)人員目標(biāo)|8.07-8.5|/8.07=5.33%,兩個誤差均在容許的范圍之內(nèi),符合設(shè)計要求。
(2)攝像頭給出兩個人員目標(biāo)為person的置信度均為1.00,該置信度已經(jīng)達(dá)到最大值,符合設(shè)計要求。
(3)激光雷達(dá)三維點(diǎn)云數(shù)據(jù)中左側(cè)人員目標(biāo)的高寬比計算值為1.48,攝像頭識別到的左側(cè)人員目標(biāo)矩形框的高寬比為(447-123)/(268-147)=2.68,二者的計算值均在合理范圍之內(nèi);激光雷達(dá)三維點(diǎn)云數(shù)據(jù)中右側(cè)人員目標(biāo)的高寬比計算值為1.78,攝像頭識別到的右側(cè)人員目標(biāo)矩形框的高寬比為(400-118)/(587-482)=2.69,二者的計算值均在合理范圍之內(nèi)。總之,兩個人員目標(biāo)在激光雷達(dá)和攝像頭下的高寬比均符合設(shè)計要求。
(4)激光雷達(dá)識別到的左側(cè)人員點(diǎn)云映射到像素坐標(biāo)系后,得到的矩形框與攝像頭識別到的左側(cè)人員矩形框交并比的計算值為95.6%,激光雷達(dá)識別到的右側(cè)人員點(diǎn)云映射到像素坐標(biāo)系后,得到的矩形框與攝像頭識別到的右側(cè)人員矩形框交并比的計算值為96.3%,均達(dá)到了95%以上,符合設(shè)計要求。
綜上所述,雙人工況下,激光雷達(dá)和攝像頭識別到的兩個人員目標(biāo)均通過了所設(shè)計的空間融合準(zhǔn)則,可以認(rèn)定攝像頭和激光雷達(dá)識別到的左側(cè)人員是同一個人員目標(biāo),攝像頭和激光雷達(dá)識別到的右側(cè)人員是同一個人員目標(biāo)。

圖6 雙人工況融合識別結(jié)果
3.3 單人跟隨識別工況
在上述野外環(huán)境中,跟隨單人行駛,車輛和引導(dǎo)員之間的距離控制在5~10 m,車輛行駛約50 m,平均行駛速度約4 km/h,得到跟隨工況識別的統(tǒng)計結(jié)果見表3。

表3 單人跟隨工況識別統(tǒng)計結(jié)果
在該工況下,人員沒有出現(xiàn)未識別情況,在統(tǒng)計結(jié)果中,攝像頭和激光雷達(dá)識別距離平均誤差為8.2%,高寬比平均誤差為5%,交并比的統(tǒng)計平均值為93.2%,該結(jié)果能夠滿足人員跟隨系統(tǒng)的設(shè)計要求。
4 結(jié)論
本文針對復(fù)雜環(huán)境下人員識別系統(tǒng)開發(fā)中所存在的一些難以解決的問題,首先建立了多傳感器融合體系架構(gòu),重點(diǎn)研究了基于圖像的深度學(xué)習(xí)人員識別方法以及激光雷達(dá)和視覺融合算法等方法,并在搭建履帶式越野車輛試驗平臺的基礎(chǔ)上,選擇合適的試驗環(huán)境并設(shè)計合理的試驗工況進(jìn)行試驗驗證,驗證了所設(shè)計的算法在復(fù)雜環(huán)境下的有效性,并得到以下結(jié)論:
(1)設(shè)計的改進(jìn)殘差模塊的YOLO v3深度學(xué)習(xí)網(wǎng)絡(luò)架構(gòu)可以在越野環(huán)境中識別人員,對人員的識別效果達(dá)到了設(shè)計的要求。
(2)激光雷達(dá)和攝像頭融合算法實(shí)現(xiàn)了在空間尺度上的融合,融合效果達(dá)到了設(shè)計要求。
本研究僅融合了激光雷達(dá)與攝像頭,隨著車載傳感器數(shù)量的逐漸增加,后期有關(guān)多傳感器融合的研究會逐步擴(kuò)展到毫米波雷達(dá)、紅外相機(jī)以及慣性導(dǎo)航系統(tǒng)等,試驗環(huán)境的復(fù)雜度以及試驗工況的種類也有待進(jìn)一步擴(kuò)展和加強(qiáng),自適應(yīng)閾值算法對于識別效果的提升也有待進(jìn)一步驗證。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
