基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)
2021-06-02 02:52:40
計(jì)算機(jī)測(cè)量與控制 2021年5期
(1.中北大學(xué) 儀器與電子學(xué)院,太原 030051; 2.中北大學(xué) 電氣與控制工程,太原 030051)
0 引言
隨著機(jī)車(chē)制造技術(shù)、互聯(lián)網(wǎng)大數(shù)據(jù)計(jì)算技術(shù)、云計(jì)算技術(shù)、AI控制技術(shù)的多種技術(shù)的快速發(fā)展與聯(lián)合應(yīng)用,推動(dòng)了無(wú)人駕駛技術(shù)的高速發(fā)展。通過(guò)對(duì)無(wú)人駕駛車(chē)輛的輸出穩(wěn)定性控制設(shè)計(jì),提高無(wú)人駕駛車(chē)的自動(dòng)駕駛能力,確保車(chē)輛在行駛過(guò)程中的安全性,研究無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)在智能化車(chē)輛控制設(shè)計(jì)中具有重要意義。基于多數(shù)據(jù)綜合分析技術(shù)與駕駛控制技術(shù)于一體的無(wú)人駕駛技術(shù),是汽車(chē)制造與設(shè)計(jì)領(lǐng)域上的一次革命,無(wú)人駕駛技術(shù)將從理念與結(jié)構(gòu)方式上改變?nèi)藗兊纳頪1]。
在無(wú)人駕駛車(chē)輛控制中,車(chē)輛狀態(tài)數(shù)據(jù)的實(shí)時(shí)性、穩(wěn)定性、準(zhǔn)確性直接決定著車(chē)輛控制指令的正確與否。因此,車(chē)輛狀態(tài)的實(shí)時(shí)監(jiān)測(cè)是發(fā)現(xiàn)車(chē)輛異常的有效方法。基于上述思想,在無(wú)人車(chē)輛諸多操作系統(tǒng)中,車(chē)輛信號(hào)監(jiān)測(cè)系統(tǒng)的監(jiān)測(cè)效果直接決定著其他控制系統(tǒng)能夠正常運(yùn)行以及能夠做出正確的指令操作[2-3]。考慮到無(wú)人駕駛車(chē)輛的是動(dòng)態(tài)數(shù)據(jù)點(diǎn),因此信號(hào)的遠(yuǎn)程監(jiān)測(cè)清晰度決定著監(jiān)測(cè)系統(tǒng)對(duì)車(chē)輛的監(jiān)測(cè)效果。結(jié)合過(guò)去無(wú)人駕駛車(chē)輛的遠(yuǎn)程監(jiān)測(cè)數(shù)據(jù)發(fā)現(xiàn),50~100 km范圍內(nèi)是無(wú)人駕駛車(chē)常用環(huán)境下的信號(hào)遠(yuǎn)程監(jiān)測(cè)最大范圍。在此范圍內(nèi),現(xiàn)有的無(wú)人駕駛車(chē)輛信號(hào)監(jiān)測(cè)系統(tǒng)都會(huì)出現(xiàn)不同程度的信號(hào)衰減帶來(lái)的清晰度降低問(wèn)題,從而導(dǎo)致監(jiān)測(cè)數(shù)據(jù)穩(wěn)定性降低[4]。究其根源在于監(jiān)測(cè)系統(tǒng)信號(hào)處理全局變量的模量化,模量信號(hào)的不同對(duì)稱(chēng)是問(wèn)題產(chǎn)生根源,而矢量數(shù)據(jù)能夠很好地解決模量帶來(lái)的問(wèn)題,因此提出基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)。
1 基于矢量傳感器的系統(tǒng)總體框架設(shè)計(jì)
基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)總框架有兩部分構(gòu)成,分別為監(jiān)測(cè)硬件與監(jiān)測(cè)軟件,框架結(jié)構(gòu)設(shè)計(jì)原理,如圖1所示。
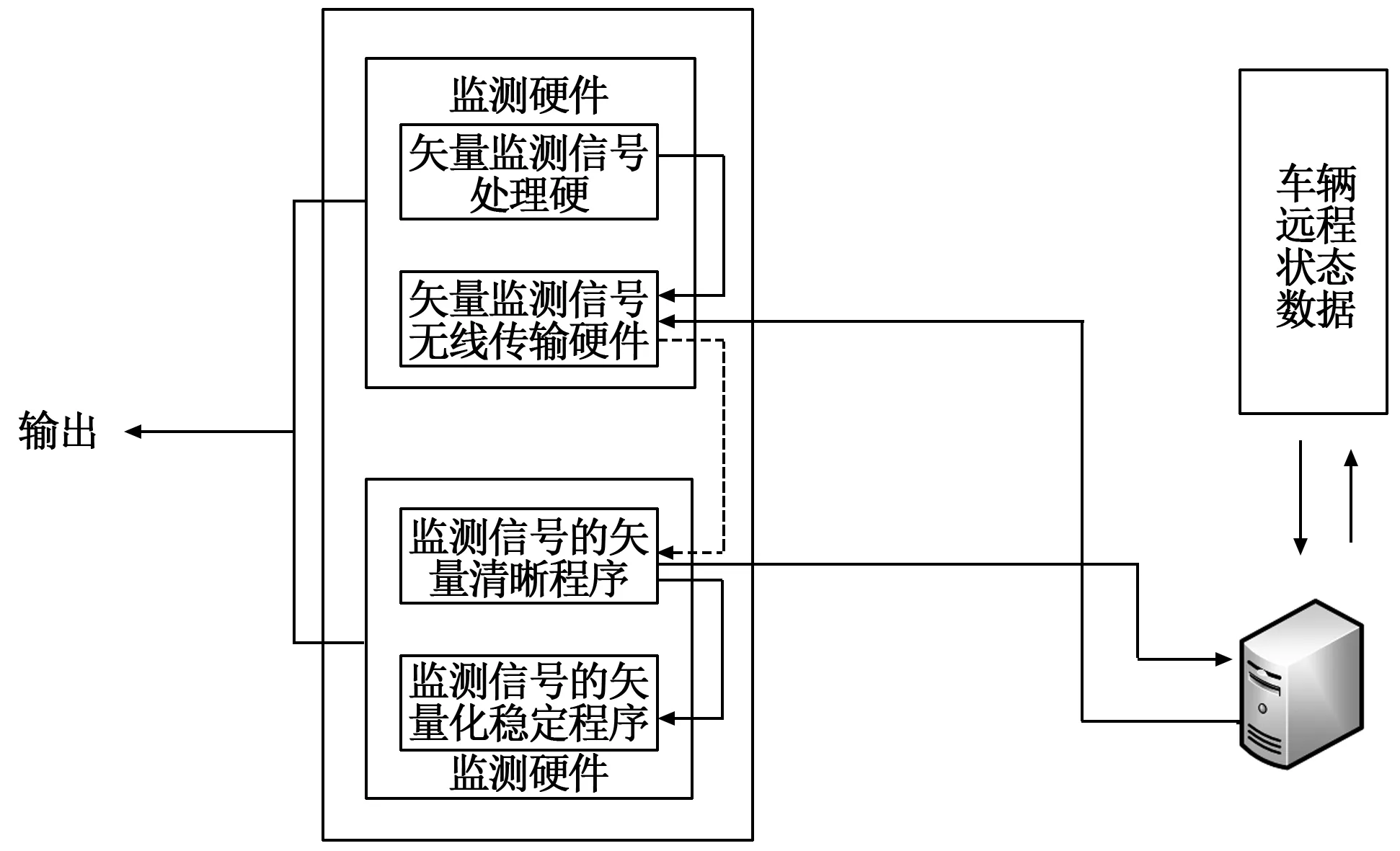
圖1 框架結(jié)構(gòu)設(shè)計(jì)原理示意圖
檢測(cè)硬件:基于矢量傳感器以及相關(guān)器件,構(gòu)建一套以矢量信號(hào)數(shù)據(jù)為核心信號(hào)源的信號(hào)收發(fā)、解析、處理平臺(tái)。矢量傳感器利用檢測(cè)的定量電壓、電流等容易檢測(cè)到的物理量信號(hào)進(jìn)行信號(hào)的遠(yuǎn)程監(jiān)測(cè)。重要的方面是如何準(zhǔn)確地獲取信號(hào)轉(zhuǎn)速的信息,且保持較高的監(jiān)測(cè)精度,滿(mǎn)足實(shí)時(shí)監(jiān)測(cè)的要求。矢量傳感器無(wú)需監(jiān)測(cè)硬件,免去了操作麻煩,提高了監(jiān)測(cè)系統(tǒng)的可靠性,降低了監(jiān)測(cè)系統(tǒng)的成本;另一方面,使得監(jiān)測(cè)系統(tǒng)的體積小、重量輕,而且減少了電機(jī)與控制器的連線,使得采用矢量傳感器的異步電機(jī)的調(diào)速系統(tǒng)在無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)中的應(yīng)用更加廣泛。利用矢量數(shù)據(jù)的一致性,通過(guò)硬件計(jì)算能力對(duì)模量數(shù)據(jù)進(jìn)行矢量化轉(zhuǎn)換,為后續(xù)軟件程序的運(yùn)行搭建處理平臺(tái)。通過(guò)不同矢量傳感器之間的數(shù)據(jù)交換,實(shí)現(xiàn)監(jiān)測(cè)信號(hào)的連續(xù)性與穩(wěn)定性,為軟件程序?qū)π盘?hào)的控制擬合,提供算力支持。
監(jiān)測(cè)軟件:軟件部分主要基于矢量傳感器設(shè)計(jì)硬件功能,通過(guò)矢量監(jiān)測(cè)相關(guān)算法,對(duì)硬件功能的驅(qū)動(dòng)程序進(jìn)行設(shè)計(jì)。通過(guò)設(shè)計(jì)程序,使硬件矢量計(jì)算功能與數(shù)據(jù)之間更好的融合,同時(shí)通過(guò)設(shè)計(jì)程序使設(shè)計(jì)硬件的遠(yuǎn)程監(jiān)測(cè)效果達(dá)到系統(tǒng)設(shè)計(jì)的預(yù)期效果。
2 基于矢量傳感器的無(wú)人駕駛車(chē)輛監(jiān)控信號(hào)交互硬件單元設(shè)計(jì)
2.1 矢量監(jiān)測(cè)信號(hào)處理硬件設(shè)計(jì)
提出系統(tǒng)硬件部分設(shè)計(jì)根據(jù)總框架結(jié)構(gòu)完成,矢量監(jiān)測(cè)信號(hào)處理硬件部分設(shè)計(jì),主要負(fù)責(zé)對(duì)監(jiān)測(cè)信號(hào)的實(shí)時(shí)高效處理,在矢量環(huán)境下對(duì)監(jiān)測(cè)信號(hào)的模量、變量進(jìn)行矢量化轉(zhuǎn)換、分析。濾除矢量環(huán)境下模量信號(hào)噪聲提升,增強(qiáng)信號(hào)解析能力,保證數(shù)據(jù)分析、傳輸、轉(zhuǎn)換效率。
矢量監(jiān)測(cè)信號(hào)處理硬件設(shè)計(jì)包括:多數(shù)據(jù)矢量傳感器R532、PL542J12矢量信號(hào)處理MCU、RS544總線、信號(hào)轉(zhuǎn)換接口485以及SIT4176R矢量信號(hào)傳感器以及信號(hào)傳輸電路構(gòu)成。硬件設(shè)計(jì)結(jié)構(gòu)如圖2所示。
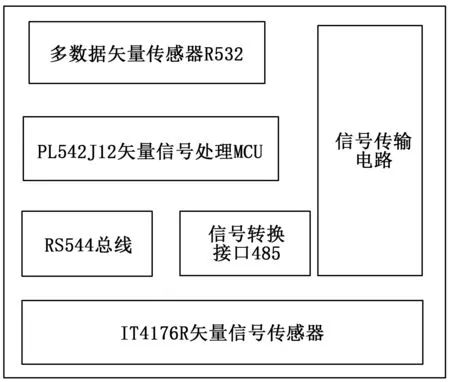
圖2 矢量監(jiān)測(cè)信號(hào)處理硬件結(jié)構(gòu)
其工作原理是由多數(shù)據(jù)矢量傳感器R532將遠(yuǎn)端監(jiān)測(cè)信號(hào)進(jìn)行接收,并將其轉(zhuǎn)發(fā)至PL542J12矢量信號(hào)處理MCU,經(jīng)過(guò)矢量轉(zhuǎn)換處理,經(jīng)RS544總線指令控制,將處理后的矢量信號(hào)由信號(hào)轉(zhuǎn)換接口485推送至SIT4176R矢量信號(hào)傳輸芯片經(jīng)信號(hào)傳輸電路輸出。
矢量監(jiān)測(cè)信號(hào)處理硬件功能實(shí)現(xiàn)過(guò)程原理如圖3所示。
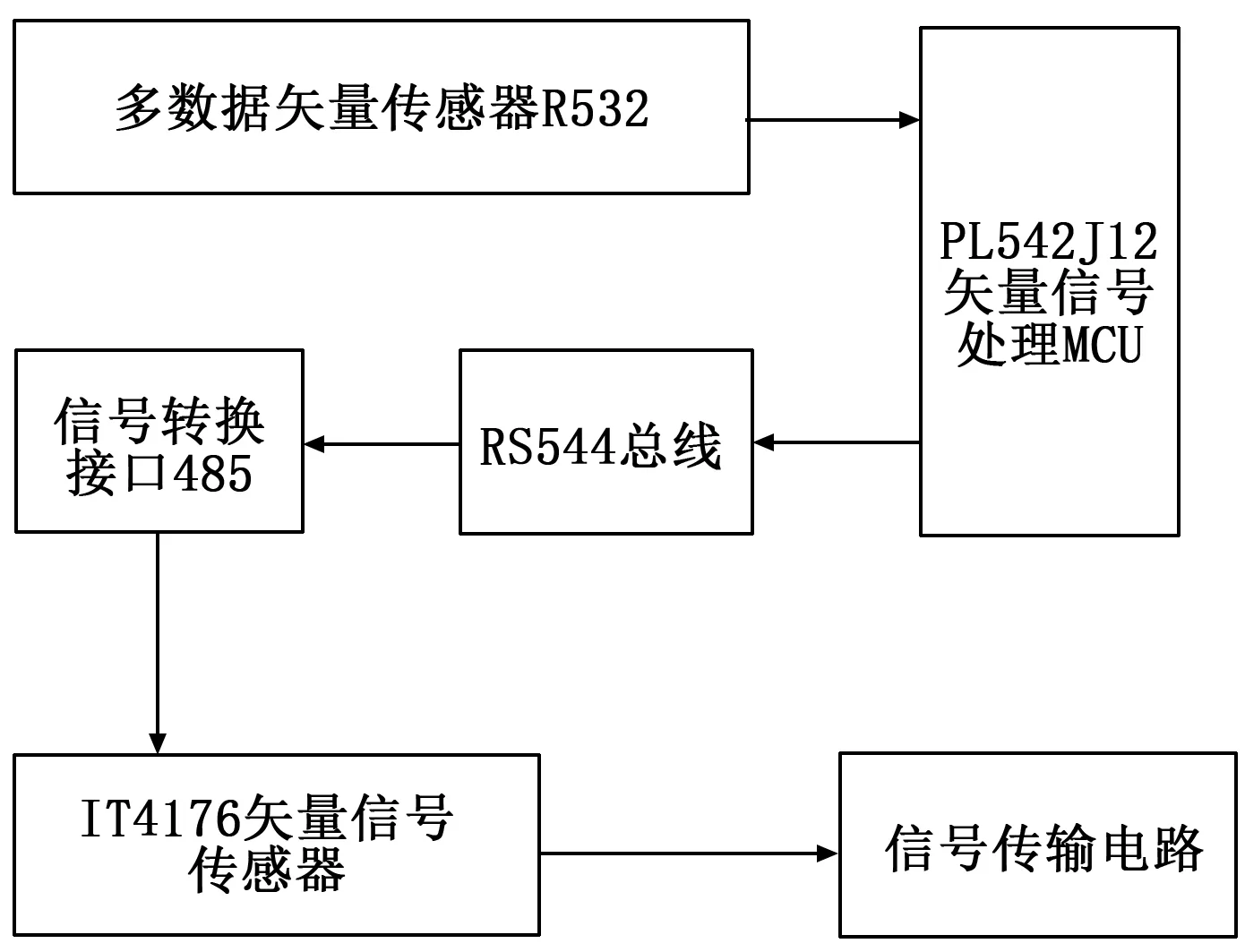
圖3 矢量監(jiān)測(cè)信號(hào)處理硬件功能實(shí)現(xiàn)過(guò)程原理
2.2 矢量監(jiān)測(cè)信號(hào)無(wú)線傳輸硬件設(shè)計(jì)
矢量監(jiān)測(cè)信號(hào)無(wú)線傳輸硬件主要通過(guò)采用矢量無(wú)線信號(hào)傳輸處理器ZP87KS33E、北斗定位信號(hào)傳感器與無(wú)線信號(hào)傳輸控制電路構(gòu)成具有矢量信號(hào)遠(yuǎn)程大功率傳輸功能模組。
ZP87KS33E矢量無(wú)線信號(hào)傳輸處理器具有矢量數(shù)據(jù)多模擬合分析速度快的特點(diǎn),輔助北斗定位信號(hào)傳感器對(duì)遠(yuǎn)程車(chē)輛位置數(shù)據(jù)的實(shí)時(shí)更新解析,由無(wú)線信號(hào)傳輸控制電路對(duì)多組信號(hào)交互擬合提供高功率、全區(qū)域覆蓋支持。無(wú)線信號(hào)傳輸控制電路設(shè)計(jì)如圖4所示。

圖4 無(wú)線信號(hào)傳輸控制電路
3 基于矢量傳感器的硬件平臺(tái)軟件適配
3.1 監(jiān)測(cè)信號(hào)的矢量清晰程序設(shè)計(jì)
在基于矢量傳感器硬件的軟件適配設(shè)計(jì)中,根據(jù)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)功能性,軟件功能設(shè)計(jì)首先對(duì)監(jiān)測(cè)信號(hào)的清晰度處理進(jìn)行設(shè)計(jì)。設(shè)計(jì)原理主要基于矢量傳感器硬件處理機(jī)制與信號(hào)濾波相關(guān)算法,對(duì)模量信號(hào)源包含的噪聲進(jìn)行矢量轉(zhuǎn)換,從而濾除模量噪聲,提升信號(hào)清晰度。程序功能實(shí)現(xiàn)的具體過(guò)程如下:
將矢量傳感器構(gòu)成硬件獲得的數(shù)據(jù)轉(zhuǎn)換為矢量空間坐標(biāo)數(shù)據(jù),根據(jù)坐標(biāo)數(shù)據(jù)創(chuàng)建矢量共維坐標(biāo)系。在坐標(biāo)空間中,定義矢量信號(hào)傳感器坐標(biāo)位置與模量信號(hào)載入坐標(biāo)位置,如圖5所示。其中,矢量信號(hào)傳感器坐標(biāo)點(diǎn)與坐標(biāo)空間的原點(diǎn)重合,將模量信號(hào)的矢量空間載入通道的正方向數(shù)量設(shè)定為3,分別沿著x,y,z正軸向分布,?1∈(-π,π]代表矢量轉(zhuǎn)換后的信號(hào)傳播水平角度值,γ1∈(-π/2,π/2]代表量轉(zhuǎn)換后的信號(hào)傳播俯仰角。

圖5 矢量監(jiān)測(cè)信號(hào)的傳感器載入方向示意圖
當(dāng)矢量轉(zhuǎn)換過(guò)程中存在任何一路信號(hào)模量不統(tǒng)一情況時(shí),程序設(shè)計(jì)函數(shù)會(huì)自行根據(jù)當(dāng)下模型轉(zhuǎn)換的矢量環(huán)境,定義4×1的矢量轉(zhuǎn)換信號(hào)誤差向量為m,從而統(tǒng)一各路模量轉(zhuǎn)換系數(shù),其中4代表模量信號(hào)的聲壓噪聲通道、x,y,z方向載入通道相位響應(yīng)與聲壓噪聲通道相位響應(yīng)之間的矢量轉(zhuǎn)換誤差量;因此m的所對(duì)應(yīng)的矢量系數(shù)為0[5]。定義此狀態(tài)下矢量信號(hào)轉(zhuǎn)換對(duì)角矩陣Γ所包含的模量數(shù)據(jù)因子為exp(km),其中,k代表矢量噪聲濾波范圍。
矢量轉(zhuǎn)換后的信號(hào)輸出向量[6],可描述為:
t(l)=[q(l),bx(l),by(l),bz(l)]Y=
o(?1,γ1)d(l)+i(l)
(1)
式中,q(l)代表聲壓通噪聲道輸出信號(hào),bx(l),by(l),bz(l),分別是信號(hào)傳播3個(gè)正向通道輸出源數(shù)據(jù);d(l)代表模量信號(hào)載入時(shí)對(duì)應(yīng)的波形向量;i(l)=[q(l),bx(l),by(l),bz(l)]Y代表聲壓噪聲與正方向3通道的矢量轉(zhuǎn)換噪聲;o(?1,γ1)代表載入模量信號(hào)的導(dǎo)向向量,其程序?qū)?yīng)算法函數(shù)形態(tài)為:
o(?1,γ1)=[1,cos(?1)cos(γ1),sin(?1)cos(γ1),sin(γ1)]Y
(2)
輸出矢量信號(hào)的噪聲協(xié)方差矩陣為:

(3)

(4)


(5)
根據(jù)式(3),可得信號(hào)清晰處理后的輸出信號(hào)為:
(6)

監(jiān)測(cè)信號(hào)的矢量清晰程序功能實(shí)現(xiàn)流程如圖6所示。
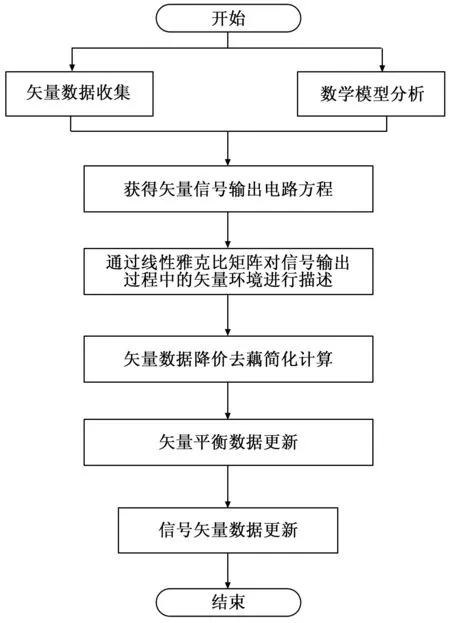
圖6 監(jiān)測(cè)信號(hào)的矢量清晰程序功能實(shí)現(xiàn)流程
3.2 監(jiān)測(cè)信號(hào)的矢量化穩(wěn)定程序設(shè)計(jì)
完成監(jiān)測(cè)信號(hào)的矢量處理后,監(jiān)測(cè)信號(hào)的清晰度得到了大幅度提升,在矢量信號(hào)的基礎(chǔ)上,為保證信號(hào)傳輸?shù)姆€(wěn)定性,設(shè)計(jì)系統(tǒng)軟件部分設(shè)計(jì)了矢量化穩(wěn)定程序?qū)ζ湫盘?hào)進(jìn)行穩(wěn)定處理[8-9]。監(jiān)測(cè)信號(hào)的矢量化穩(wěn)定程序設(shè)計(jì)功能實(shí)現(xiàn)主要基于矢量傳感器收集收據(jù),結(jié)合卡爾曼濾波空間的BLDCM模型,對(duì)傳感器信號(hào)輸出狀態(tài)進(jìn)行轉(zhuǎn)移平衡控制,達(dá)到穩(wěn)定信號(hào)傳輸效果[10]。程序功能實(shí)現(xiàn)具體步驟如下所述。
根據(jù)矢量傳感器收集數(shù)據(jù)與矢量狀態(tài)進(jìn)行數(shù)學(xué)建模分析,結(jié)合β-χ兩相靜止坐標(biāo)系上的矢量信號(hào)輸出電路方程可寫(xiě)為:
(7)
式中,Ad=Af=Aw,d代表信號(hào)矢量狀態(tài)算子。定義狀態(tài)分量r為:
(8)
根據(jù)矢量信號(hào)傳輸狀態(tài)隨時(shí)間的變化特征[11],這個(gè)基本的EKF模型在實(shí)際應(yīng)用中是隨時(shí)間變化的,可通過(guò)線性雅克比矩陣對(duì)信號(hào)輸出過(guò)程中的矢量環(huán)境進(jìn)行方程描述[12]:
(9)
為了簡(jiǎn)化程序計(jì)算流程,對(duì)矢量電路環(huán)境中的信號(hào)電流系數(shù)量nβ、nχ進(jìn)行去耦降價(jià),獲得雅可比矩陣,矢量信號(hào)輸出矩陣與矢量信號(hào)狀態(tài)轉(zhuǎn)移矩陣如下:
(10)
(11)

(12)
(13)
對(duì)信號(hào)輸出矢量數(shù)據(jù)進(jìn)行更新,更新步驟如下:
對(duì)Wf、Tf、Q0、i進(jìn)行初始化操作;采集矢量信號(hào)輸出電路ns、nm、oβ、oχ的數(shù)據(jù)值;對(duì)矢量電路信號(hào)電流值nβ(i)、nχ(i)與信號(hào)狀態(tài)動(dòng)勢(shì)rβ(i)、rχ(i)進(jìn)行數(shù)據(jù)導(dǎo)出替換。
4 實(shí)驗(yàn)結(jié)果分析
對(duì)基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)的監(jiān)測(cè)信號(hào)效果進(jìn)行對(duì)比實(shí)驗(yàn)。本文設(shè)計(jì)的基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)作為系統(tǒng)1,基于基站技術(shù)的車(chē)輛監(jiān)測(cè)系統(tǒng)作為系統(tǒng)2,基于GPS追蹤的車(chē)輛監(jiān)測(cè)系統(tǒng)作為系統(tǒng)3進(jìn)行實(shí)驗(yàn)驗(yàn)證。
4.1 實(shí)驗(yàn)配置
實(shí)驗(yàn)采用系統(tǒng)2和系統(tǒng)3作為對(duì)比系統(tǒng),分別對(duì)設(shè)計(jì)系統(tǒng)50~100 km為半徑范圍內(nèi)的信號(hào)強(qiáng)度與信號(hào)連續(xù)性進(jìn)行對(duì)比測(cè)試。具體測(cè)試步驟如下:
1)將本文設(shè)計(jì)系統(tǒng)1與兩種對(duì)比系統(tǒng)2和系統(tǒng)3接入測(cè)試環(huán)境,并統(tǒng)一向參測(cè)系統(tǒng)發(fā)送測(cè)試車(chē)輛位置移動(dòng)數(shù)據(jù)(車(chē)輛位置數(shù)據(jù)為50~100 km為半徑范圍內(nèi)的移動(dòng)狀態(tài)數(shù)據(jù));
2)以30秒為一個(gè)數(shù)據(jù)結(jié)算單位,連續(xù)記錄參測(cè)系統(tǒng)10個(gè)單位結(jié)算數(shù)據(jù);
3)對(duì)結(jié)算數(shù)據(jù)中本文設(shè)計(jì)系統(tǒng)1與系統(tǒng)2、系統(tǒng)3的信號(hào)強(qiáng)度;
4)根據(jù)對(duì)比結(jié)果得出強(qiáng)度測(cè)試結(jié)果。
按照上述測(cè)試方式,利用相同測(cè)試數(shù)據(jù)與環(huán)境,完成3種系統(tǒng)的連續(xù)性測(cè)試,并得出結(jié)論。
4.2 遠(yuǎn)程監(jiān)測(cè)信號(hào)強(qiáng)度對(duì)比實(shí)驗(yàn)
對(duì)本文設(shè)計(jì)系統(tǒng)1與兩種對(duì)比系統(tǒng)2、系統(tǒng)3的遠(yuǎn)程監(jiān)測(cè)信號(hào)強(qiáng)度進(jìn)行對(duì)比實(shí)驗(yàn),其中信號(hào)強(qiáng)度dBm的值越大越好,信號(hào)強(qiáng)度對(duì)比實(shí)驗(yàn)結(jié)果如表1所示。
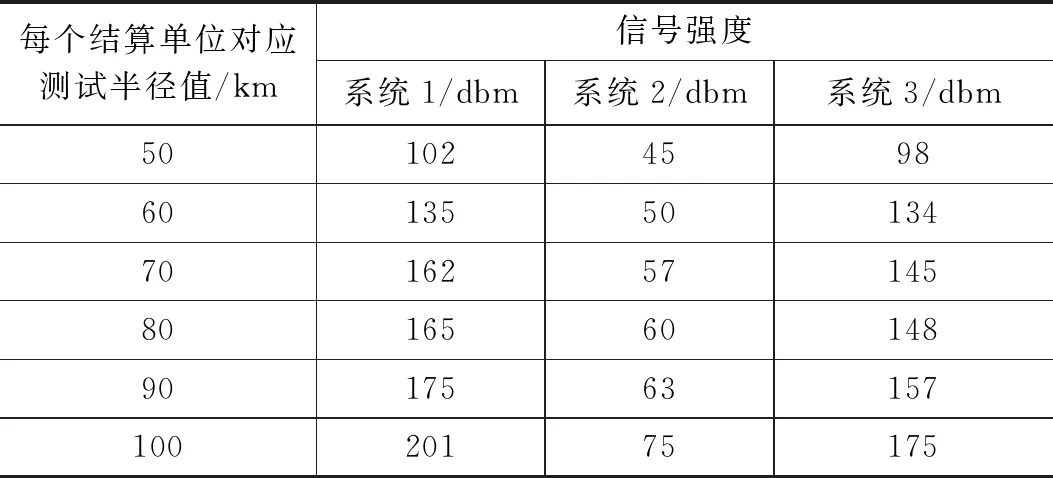
表1 不同系統(tǒng)的遠(yuǎn)程監(jiān)測(cè)信號(hào)強(qiáng)度對(duì)比實(shí)驗(yàn)結(jié)果
通過(guò)對(duì)比表1實(shí)驗(yàn)結(jié)果發(fā)現(xiàn),系統(tǒng)1(基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng))在測(cè)試距離范圍內(nèi)的信號(hào)強(qiáng)度明顯優(yōu)于系統(tǒng)2(基于基站技術(shù)的車(chē)輛監(jiān)測(cè)系統(tǒng))和系統(tǒng)3(基于GPS追蹤的車(chē)輛監(jiān)測(cè)系統(tǒng))的信號(hào)強(qiáng)度,且根據(jù)信號(hào)強(qiáng)度值波動(dòng)范圍來(lái)看,本文所設(shè)計(jì)的基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)的信號(hào)強(qiáng)度穩(wěn)定性較好;其原因是所設(shè)計(jì)的系統(tǒng)1根據(jù)矢量信號(hào)的電路電流與矢量電壓狀態(tài)分量,獲得監(jiān)測(cè)信號(hào)輸出過(guò)程中的信號(hào)矢量角與穩(wěn)定概率,一定程度上有利于提高遠(yuǎn)程監(jiān)測(cè)信號(hào)強(qiáng)度。
4.3 遠(yuǎn)程監(jiān)測(cè)信號(hào)連續(xù)性對(duì)比
對(duì)本文設(shè)計(jì)系統(tǒng)1與兩種對(duì)比系統(tǒng)2、系統(tǒng)3的遠(yuǎn)程監(jiān)測(cè)信號(hào)連續(xù)性進(jìn)行對(duì)比實(shí)驗(yàn),其中信號(hào)丟包率越小越好,實(shí)驗(yàn)結(jié)果如表2所示。
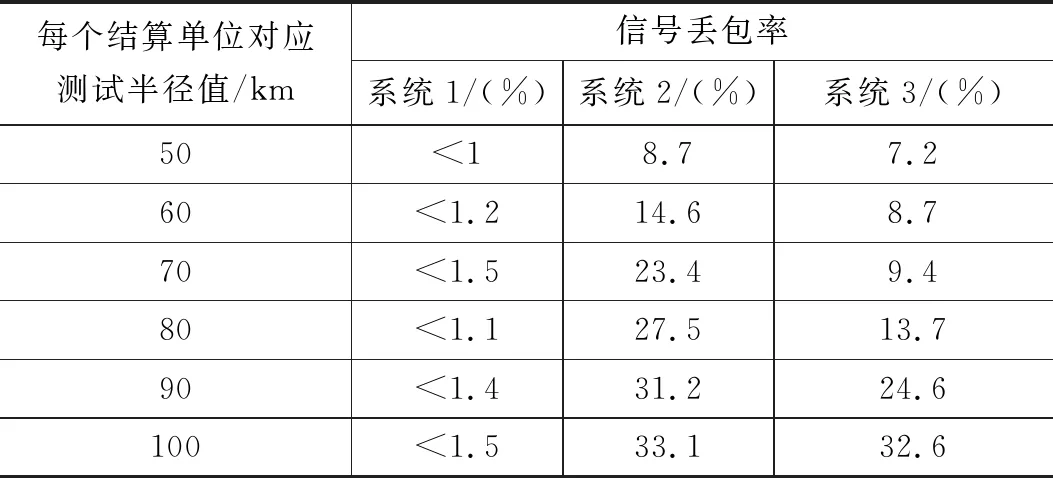
表2 不同系統(tǒng)的遠(yuǎn)程監(jiān)測(cè)信號(hào)連續(xù)性對(duì)比實(shí)驗(yàn)結(jié)果
通過(guò)對(duì)比表2實(shí)驗(yàn)結(jié)果發(fā)現(xiàn),系統(tǒng)1在50~100 km測(cè)試范圍內(nèi)的信號(hào)丟包率,能夠穩(wěn)定控制在1.5%以下,相對(duì)比系統(tǒng)2和系統(tǒng)3的信號(hào)丟包率效果優(yōu)越性明顯,通過(guò)信號(hào)丟包率能夠側(cè)面反映出系統(tǒng)1的信號(hào)連續(xù)性。其原因是所設(shè)計(jì)的系統(tǒng)1完成監(jiān)測(cè)信號(hào)的矢量處理后,大幅度提升了監(jiān)測(cè)信號(hào)的清晰度,在矢量信號(hào)的基礎(chǔ)上,保證了信號(hào)傳輸?shù)姆€(wěn)定性,更有利于降低信號(hào)丟包率。
綜上所述,結(jié)合對(duì)不同系統(tǒng)的信號(hào)強(qiáng)度與連續(xù)性對(duì)比實(shí)驗(yàn)數(shù)據(jù)綜合分析,可以證明提出的基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)具有提升監(jiān)測(cè)信號(hào)清晰度,優(yōu)化監(jiān)測(cè)信號(hào)實(shí)時(shí)性與連續(xù)行的效果,起到了改進(jìn)傳統(tǒng)系統(tǒng),解決信號(hào)質(zhì)量問(wèn)題的作用。
5 結(jié)束語(yǔ)
文章對(duì)傳統(tǒng)無(wú)人駕駛車(chē)輛信號(hào)監(jiān)測(cè)系統(tǒng),存在的遠(yuǎn)程信號(hào)清晰度隨距離基量增加信號(hào)衰減,導(dǎo)致的監(jiān)測(cè)信號(hào)清晰度降低問(wèn)題,提出了基于矢量傳感器的無(wú)人駕駛車(chē)輛信號(hào)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)。利用矢量數(shù)據(jù)的統(tǒng)一性,結(jié)合矢量傳感器應(yīng)用技術(shù)與矢量傳感器相關(guān)算法,對(duì)提出系統(tǒng)的軟件與硬件進(jìn)行了相關(guān)設(shè)計(jì)。通過(guò)與兩種不同監(jiān)測(cè)系統(tǒng)的信號(hào)強(qiáng)度與連續(xù)性數(shù)據(jù)對(duì)比,證明了設(shè)計(jì)系統(tǒng)的可應(yīng)用性與應(yīng)用推廣價(jià)值。設(shè)計(jì)系統(tǒng)的提出,為無(wú)人駕駛車(chē)輛的研發(fā)與控制技術(shù)的完善,提供了更多基礎(chǔ)實(shí)踐數(shù)據(jù)與解決方案。但是本文研究?jī)H在實(shí)驗(yàn)環(huán)境中進(jìn)行了測(cè)試,實(shí)際無(wú)人駕駛車(chē)輛信號(hào)監(jiān)測(cè)環(huán)境更為復(fù)雜,因此該系統(tǒng)有待進(jìn)一步研究和分析。對(duì)于未來(lái)的研究,可就減少事故發(fā)生率,對(duì)信號(hào)監(jiān)測(cè)系統(tǒng)輔助無(wú)人駕駛車(chē)輛行駛進(jìn)行研究,提高無(wú)人駕駛車(chē)輛安全性能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
- 計(jì)算機(jī)測(cè)量與控制的其它文章
- 基于DE-Xgboost的U71Mn鋼粗糙度預(yù)測(cè)模型
- 面向飛行器遙測(cè)數(shù)據(jù)的關(guān)聯(lián)規(guī)則挖掘方法研究
- 動(dòng)態(tài)數(shù)據(jù)校正技術(shù)用于GMVC控制器性能評(píng)估的改進(jìn)
- 大數(shù)據(jù)加密算法在數(shù)據(jù)安全保護(hù)中的應(yīng)用研究
- 基于粒子群優(yōu)化方法的電力系統(tǒng)狀態(tài)向量估計(jì)模型
- FPGA塊存儲(chǔ)器的多位翻轉(zhuǎn)容錯(cuò)設(shè)計(jì)