單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)圓錐誤差分析與仿真
2021-05-27 06:38:30程向紅劉文倩
中國慣性技術(shù)學(xué)報(bào) 2021年1期
丁 鵬,程向紅,劉文倩
(1.微慣性儀表與先進(jìn)導(dǎo)航技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,南京210096;2.東南大學(xué) 儀器科學(xué)與工程學(xué)院,南京 210096)
在捷聯(lián)式慣性導(dǎo)航系統(tǒng)(Strapdown Inertial Navigation Systems,SINS)中,陀螺儀直接固連于載體,敏感載體相對(duì)慣性空間的角運(yùn)動(dòng)。姿態(tài)算法的性能直接影響SINS 的導(dǎo)航精度,由于有限轉(zhuǎn)動(dòng)的不可交換性影響,姿態(tài)解算中不可避免地引入圓錐誤差,尤其是在高動(dòng)態(tài)環(huán)境下更為惡劣[1]。1971年Bortz 最早提出了等效旋轉(zhuǎn)矢量概念,在理論上解決了不可交換性誤差的補(bǔ)償問題,后續(xù)眾多學(xué)者在其基礎(chǔ)上對(duì)圓錐誤差補(bǔ)償算法進(jìn)行了研究[2-5]。
慣性測(cè)量單元(Inertial measurement unit,IMU)的測(cè)量精度是影響SINS 導(dǎo)航性能的主要因素,通過旋轉(zhuǎn)調(diào)制技術(shù)在SINS 上加裝一個(gè)轉(zhuǎn)位機(jī)構(gòu),令I(lǐng)MU 按設(shè)計(jì)的方案進(jìn)行旋轉(zhuǎn),通過旋轉(zhuǎn)調(diào)制可有效抑制IMU的常值誤差項(xiàng),提高導(dǎo)航系統(tǒng)的精度[6]。雖然IMU 與載體之間不再直接固連,增加了轉(zhuǎn)位機(jī)構(gòu)和測(cè)角裝置,但在導(dǎo)航解算上仍采用捷聯(lián)慣導(dǎo)算法,因此也被稱為旋轉(zhuǎn)調(diào)制式捷聯(lián)慣導(dǎo)系統(tǒng)(Rotational Strapdown Inertial Navigation Systems,RINS)[7]。20 世紀(jì)90年代,Sperry 公司研制出首臺(tái)激光陀螺單軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng),并成功應(yīng)用于水面艦船和潛艇中[7]。后續(xù)國內(nèi)外研究團(tuán)隊(duì)開展了基于激光陀螺和光纖陀螺的單軸、雙軸和三軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)的研制[8,9]。
在單軸RINS 中,IMU 安裝在轉(zhuǎn)位機(jī)構(gòu)上并隨之轉(zhuǎn)動(dòng),相對(duì)純SINS 其運(yùn)動(dòng)模型發(fā)生了改變,其不可交換性誤差、圓錐誤差補(bǔ)償效果以及補(bǔ)償后的剩余誤差也將發(fā)生改變,目前尚未有針對(duì)單軸RINS 此方面的研究。針對(duì)上述轉(zhuǎn)變,本文首先剖析了單軸RINS在典型圓錐環(huán)境下的運(yùn)動(dòng)形式,建立其運(yùn)動(dòng)模型并推導(dǎo)角速率擬合下的不可交換性誤差,然后研究了基于角速率的旋轉(zhuǎn)矢量算法和轉(zhuǎn)位方案對(duì)圓錐誤差補(bǔ)償?shù)挠绊懀詈笸ㄟ^仿真實(shí)驗(yàn)驗(yàn)證理論分析的有效性。
1 單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)圓錐運(yùn)動(dòng)特性分析
相對(duì)于SINS,單軸RINS 的圓錐運(yùn)動(dòng)模型和不可交換性誤差均發(fā)生了改變,因此需要對(duì)其進(jìn)行分析推導(dǎo),為圓錐誤差補(bǔ)償算法在實(shí)際工程中應(yīng)用提供參考。下面將以光纖陀螺慣導(dǎo)系統(tǒng)為例分析單軸RINS 的圓錐誤差,所得的結(jié)論同樣適用于輸出信號(hào)為角增量的激光陀螺系統(tǒng)。
1.1 單軸旋轉(zhuǎn)捷聯(lián)系統(tǒng)圓錐運(yùn)動(dòng)描述
圓錐運(yùn)動(dòng)是慣性儀表感受到角振動(dòng)的作用結(jié)果,當(dāng)其兩個(gè)正交軸上有同頻不同相的正弦角振動(dòng)輸入時(shí),第三個(gè)正交軸上便會(huì)輸出常值角速度,稱為等效陀螺漂移,它的產(chǎn)生會(huì)帶來導(dǎo)航計(jì)算誤差,即圓錐誤差[1]。
本文所用的坐標(biāo)系定義:導(dǎo)航坐標(biāo)系n采用東-北-天地理坐標(biāo)系;載體坐標(biāo)系b按右-前-上構(gòu)成右手直角坐標(biāo)系;旋轉(zhuǎn)坐標(biāo)系r是三軸陀螺加速度計(jì)所指向的坐標(biāo)系,因此在轉(zhuǎn)位機(jī)構(gòu)旋轉(zhuǎn)起始時(shí)刻有。
在SINS 中,假設(shè)b系相對(duì)n系以為錐軸做典型圓錐運(yùn)動(dòng),半錐角為α,圓錐運(yùn)動(dòng)角頻率為則SINS 中t時(shí)刻的姿態(tài)四元數(shù)為:
在單軸RINS 中IMU 安裝在一個(gè)轉(zhuǎn)位機(jī)構(gòu)上,由于轉(zhuǎn)位機(jī)構(gòu)相對(duì)載體坐標(biāo)系b存在轉(zhuǎn)動(dòng),導(dǎo)致r系相對(duì)n系除了做典型圓錐運(yùn)動(dòng)外,還會(huì)隨著轉(zhuǎn)位機(jī)構(gòu)繞轉(zhuǎn)動(dòng),設(shè)其轉(zhuǎn)速為則單軸RINS 中的圓錐運(yùn)動(dòng)可以表示為b系相對(duì)n系做圓錐運(yùn)動(dòng)與r系相對(duì)于b系做旋轉(zhuǎn)運(yùn)動(dòng)的合成,則耦合轉(zhuǎn)動(dòng)下的圓錐變換四元數(shù)為:

由式(2)和式(4)可得,當(dāng)轉(zhuǎn)位機(jī)構(gòu)存在旋轉(zhuǎn)角速度時(shí),圓錐運(yùn)動(dòng)模型也將發(fā)生轉(zhuǎn)變。
1.2 單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)中圓錐運(yùn)動(dòng)的等效旋轉(zhuǎn)矢量分析
由于剛體幾何轉(zhuǎn)動(dòng)的不可交換性的影響,使得利用IMU 的輸出在圓錐運(yùn)動(dòng)環(huán)境下進(jìn)行導(dǎo)航解算時(shí)存在誤差,體現(xiàn)在等效旋轉(zhuǎn)矢量的計(jì)算誤差。
以Q(tk)和Q(tk-1)分別表示在tk和tk-1時(shí)刻n系至r系的變換四元數(shù),對(duì)應(yīng)的姿態(tài)變化四元數(shù)為q(h),其中姿態(tài)更新周期h=tk-tk-1,根據(jù)四元數(shù)更新方程,有:

可得tk-1時(shí)刻至tk時(shí)刻對(duì)應(yīng)于r系的四元數(shù)q(h):
根據(jù)姿態(tài)變化四元數(shù)q(h)與等效旋轉(zhuǎn)矢量Φ(h)之間的對(duì)應(yīng)關(guān)系,有:

式中,|Φ(h)|是矢量Φ(h)的模,由于姿態(tài)更新周期一般都很短,可認(rèn)為Φ(h)為小量,簡化式(7)得:

對(duì)比式(6)和式(8)的矢量部分可得:
2 單軸RINS 中轉(zhuǎn)動(dòng)不可交換性誤差與圓錐誤差補(bǔ)償算法
在SINS 中,通常采用基于角速率/角增量的多子樣旋轉(zhuǎn)矢量算法補(bǔ)償不可交換性誤差。由于單軸RINS的圓錐運(yùn)動(dòng)特性發(fā)生改變,其補(bǔ)償形式也將會(huì)不同,因此需要研究姿態(tài)算法和轉(zhuǎn)位方案對(duì)圓錐誤差補(bǔ)償?shù)挠绊憽?/p>
2.1 轉(zhuǎn)動(dòng)不可交換性誤差分析
雖然光纖陀螺的輸出信號(hào)是角速率形式,但考慮到采樣量化電路,故實(shí)際使用的光纖陀螺大都是在高速率采樣的基礎(chǔ)上再作平均和降頻處理,其輸出信息更像是角增量。文獻(xiàn)[2]指出若將角速率形式信號(hào)轉(zhuǎn)換成角增量進(jìn)而構(gòu)造等效旋轉(zhuǎn)矢量,則在此轉(zhuǎn)換過程中會(huì)引入較大噪聲,為此設(shè)計(jì)了基于角速率輸入的廣義圓錐算法。基于角速率N子樣圓錐補(bǔ)償算法的基本原理是在每個(gè)姿態(tài)更新周期h內(nèi)獲得N+1 次陀螺采樣角速率ωi(i=0,1,2,…,N),利用數(shù)值積分公式[2]由角速率估計(jì)角增量,并通過ωi之間的矢量叉乘對(duì)圓錐誤差補(bǔ)償項(xiàng)進(jìn)行逼近,等效旋轉(zhuǎn)矢量估計(jì)值?()hΦ為:
當(dāng)(ωc-ωr)h和ωch都是小量時(shí),即有sin[(ωc-ωr)h]=(ωc-ωr)h,sin[ωch]=ωch,角增量估計(jì)值為:
因此不可交換性誤差的理論值近似為:
通過式(12)可以看出:
(1)基于角速率輸入下的單軸RINS 的不可交換性誤差在x軸與y軸分量為0,這與純SINS 的圓錐誤差一致。當(dāng)(ωc-ωr)h和ωch不都是小量時(shí),單軸RINS的不可交換性誤差在x軸與y軸表現(xiàn)為周期量,其角頻率為ωc-ωr,幅度與子樣數(shù)有關(guān)。
(2)z軸常值誤差分量中引入了ωr及其與α的耦合項(xiàng),相對(duì)SINS 發(fā)生了變化。
2.2 基于角速率的圓錐誤差補(bǔ)償算法分析
在對(duì)不可交換性誤差進(jìn)行補(bǔ)償時(shí),將主要考慮其常量部分。根據(jù)式(12)有:
利用泰勒級(jí)數(shù)展開δΦz(mì)(h)中sin(ωc-ωr/2)h,可得:

式中,dk=(-1)k+1N2k+1/[2(2k+1)!],λ1=(ωc-ωr/2)T。
文獻(xiàn)[2]中基于角速率的圓錐誤差補(bǔ)償項(xiàng)通式為:

式中,KN-i為待優(yōu)化系數(shù),將角速率公式(4)代入到ω(ti)×ω(tj)且i≠j,得:

基于角速率的多子樣旋轉(zhuǎn)矢量算法常用式(17)對(duì)式(13)進(jìn)行逼近,待優(yōu)化系數(shù)為Kj(j=1,2…N),對(duì)于純SINS,有λ1=λ2,因此可令式(17)和(13)相等,從而求解各子樣下的Kj。但在單軸RINS 中,λ1≠λ2,Kj取決于ωc和ωr,而在實(shí)際系統(tǒng)中ωc無法獲得,ωr也并非常值。根據(jù)實(shí)際工程中的應(yīng)用,令單軸RINS 中的Kj與SINS 的圓錐優(yōu)化系數(shù)一致,在此基礎(chǔ)上對(duì)圓錐誤差補(bǔ)償后的剩余誤差進(jìn)行分析。
比較式(17)和式(14),可以看出在一個(gè)姿態(tài)更新周期內(nèi)單軸RINS 圓錐誤差補(bǔ)償?shù)氖S嗾`差包括4 部分:
(3)λ1和λ2的差異在補(bǔ)償時(shí)會(huì)產(chǎn)生誤差。
(4)多子樣算法在逼近圓錐補(bǔ)償項(xiàng)時(shí)存在剩余誤差,可近似為。
綜合以上分析,可得單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)N子樣圓錐誤差補(bǔ)償算法的剩余誤差為:
根據(jù)式(18),可將剩余誤差分為3 類:
(1)εN的第一項(xiàng)誤差與算法的子樣數(shù)無關(guān),由轉(zhuǎn)位機(jī)構(gòu)的旋轉(zhuǎn)角頻率所引起,不存在于SINS 中。
(2)εN的第二項(xiàng)誤差與圓錐運(yùn)動(dòng)角頻率、轉(zhuǎn)位機(jī)構(gòu)旋轉(zhuǎn)角頻率和算法子樣數(shù)相關(guān)。在角頻率不變下,增加算法的子樣數(shù)可減小該項(xiàng)誤差,SINS 中也存在類似誤差。
(3)εN的第三項(xiàng)誤差與圓錐運(yùn)動(dòng)角頻率、轉(zhuǎn)位機(jī)構(gòu)旋轉(zhuǎn)角頻率和算法子樣數(shù)相關(guān),增加算法的子樣數(shù)可減小該項(xiàng)誤差,SINS 中不存在此類誤差。
在SINS 中,圓錐誤差的補(bǔ)償精度隨著子樣數(shù)的增加而提高。但在單軸RINS 中,由于εN中第一項(xiàng)剩余常值誤差的限制,使得多子樣算法的補(bǔ)償精度不再隨子樣數(shù)的增加而逐漸提高。
2.3 轉(zhuǎn)位方案對(duì)圓錐誤差補(bǔ)償?shù)挠绊?/h3>
綜合考慮轉(zhuǎn)位方案對(duì)陀螺水平常值漂移的調(diào)制效果和實(shí)際工程應(yīng)用成本,轉(zhuǎn)位機(jī)構(gòu)通常以多位置轉(zhuǎn)停的方式進(jìn)行正反方向旋轉(zhuǎn)。而在實(shí)際系統(tǒng)中,轉(zhuǎn)位機(jī)構(gòu)的啟停存在變速運(yùn)動(dòng),即ωr是時(shí)間t的函數(shù),若在轉(zhuǎn)位方案中頻繁引入變速運(yùn)動(dòng),不僅會(huì)降低實(shí)際系統(tǒng)的誤差調(diào)制效果,還會(huì)影響圓錐運(yùn)動(dòng)模型及其誤差補(bǔ)償效果。
(1)多子樣算法補(bǔ)償不可交換性誤差后的剩余誤差是通過時(shí)間累積來影響單軸RINS。當(dāng)ωr在轉(zhuǎn)動(dòng)周期內(nèi)表現(xiàn)為正反向?qū)ΨQ時(shí),εN中第1 項(xiàng)常值誤差在每個(gè)轉(zhuǎn)動(dòng)周期內(nèi)將相互抵消。
(2)在單軸RINS 的停留階段,其圓錐運(yùn)動(dòng)模型及剩余誤差εN與SINS 相同。
(3)轉(zhuǎn)位機(jī)構(gòu)的變速運(yùn)動(dòng),不僅直接影響了IMU位置和速率的對(duì)稱性,還間接影響了不可交換性誤差的補(bǔ)償效果。
3 仿真實(shí)驗(yàn)與分析
針對(duì)以上對(duì)單軸RINS 在圓錐運(yùn)動(dòng)下不可交換性誤差補(bǔ)償?shù)睦碚撏茖?dǎo)與分析,將通過仿真比較轉(zhuǎn)位方案對(duì)姿態(tài)誤差的影響以及基于角速率的多子樣旋轉(zhuǎn)矢量法對(duì)圓錐誤差補(bǔ)償?shù)男Ч?/p>
3.1 單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)中轉(zhuǎn)位方案對(duì)圓錐誤差影響仿真
仿真總體條件設(shè)置如下:半錐角α為1 °,圓錐運(yùn)動(dòng)頻率為1 Hz,陀螺采樣周期T=0.005 s,仿真時(shí)間20 min,假設(shè)b系相對(duì)n系做典型圓錐運(yùn)動(dòng),姿態(tài)更新算法采用基于角速率的二子樣旋轉(zhuǎn)矢量算法。
當(dāng)旋轉(zhuǎn)角速度ωr為0 時(shí),其姿態(tài)誤差如圖1所示;當(dāng)轉(zhuǎn)位機(jī)構(gòu)以ωr=16 °/s 單方向持續(xù)旋轉(zhuǎn)時(shí),其姿態(tài)誤差如圖2所示;當(dāng)轉(zhuǎn)位機(jī)構(gòu)以旋轉(zhuǎn)角速度ωr=16 °/s,旋轉(zhuǎn)角加速度ar=8 °/s2單位置正反轉(zhuǎn)停時(shí),其姿態(tài)誤差如圖3所示,停轉(zhuǎn)時(shí)間為2.5 min;當(dāng)轉(zhuǎn)位機(jī)構(gòu)以ωr=16 °/s,ar=8 °/s2四位置轉(zhuǎn)停,四位置轉(zhuǎn)位停的順序?yàn)椋? °→180 °→270 °→90 °→0 °,其姿態(tài)誤差如圖4所示。其中ΔH、ΔP、ΔR分別表示載體的航向角、俯仰角和橫滾角誤差。
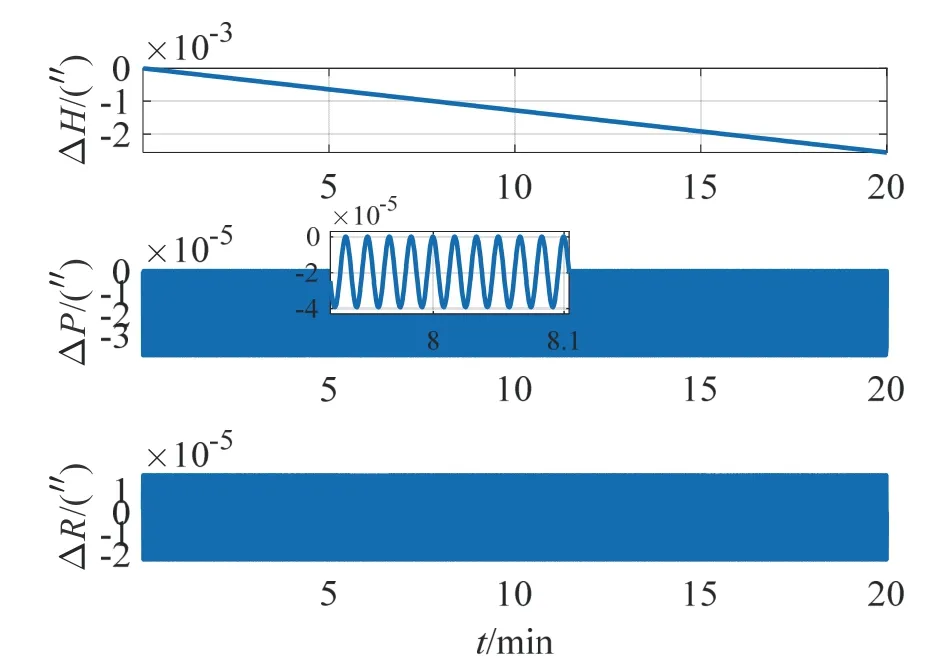
圖1 零速旋轉(zhuǎn)下姿態(tài)誤差Fig.1 Attitude error under zero speed rotation
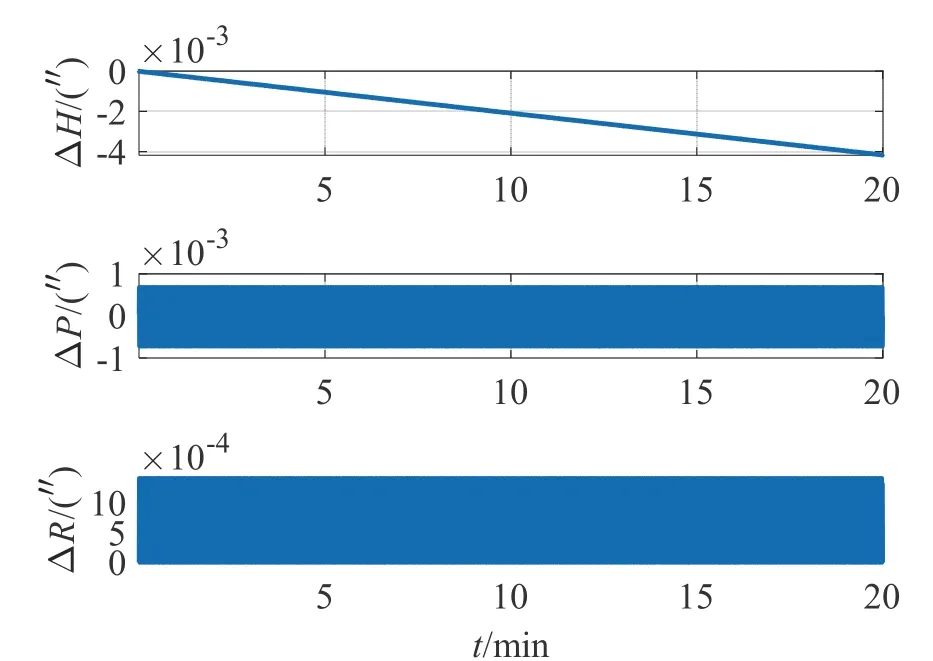
圖2 單向勻速旋轉(zhuǎn)下姿態(tài)誤差Fig.2 Attitude error under unidirectional rotation
由圖1 可以看出,轉(zhuǎn)位機(jī)構(gòu)停轉(zhuǎn)條件下的姿態(tài)誤差變化與SINS 一致;相對(duì)零速轉(zhuǎn)動(dòng),圖2 中當(dāng)轉(zhuǎn)位機(jī)構(gòu)存在轉(zhuǎn)速時(shí),航向角誤差增大0.6 倍,水平姿態(tài)角誤差波動(dòng)幅度增大1~2 個(gè)數(shù)量級(jí)。對(duì)比圖2、圖3和圖4 可知,通過轉(zhuǎn)位機(jī)構(gòu)的正反轉(zhuǎn)可降低航向角誤差和水平姿態(tài)角誤差,但由于在啟停過程中引入了變速運(yùn)動(dòng),導(dǎo)致水平姿態(tài)角誤差在短時(shí)間內(nèi)有劇烈的周期振動(dòng),比停轉(zhuǎn)階段的誤差幅度大2~3 個(gè)數(shù)量級(jí)。單軸RINS 在圓錐運(yùn)動(dòng)下的水平姿態(tài)角誤差仍是呈現(xiàn)出周期性變化,故主要考慮航向角誤差,四種轉(zhuǎn)位方案下的航向角誤差仍隨時(shí)間發(fā)散,由表1 知四位置轉(zhuǎn)停方案下的航向角誤差最小,但其啟停階段的航向角誤差要比停轉(zhuǎn)階段的誤差大3 個(gè)數(shù)量級(jí),持續(xù)時(shí)間取決于啟停的時(shí)間差,在本節(jié)仿真中轉(zhuǎn)過90 °和180 °所需的時(shí)間分別為7.625 s 和13.25 s。
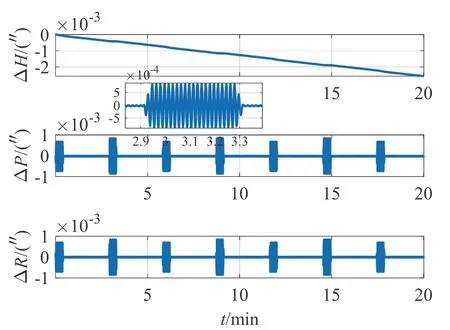
圖3 正反轉(zhuǎn)停下姿態(tài)誤差Fig.3 Attitude error under reversible switch-stop
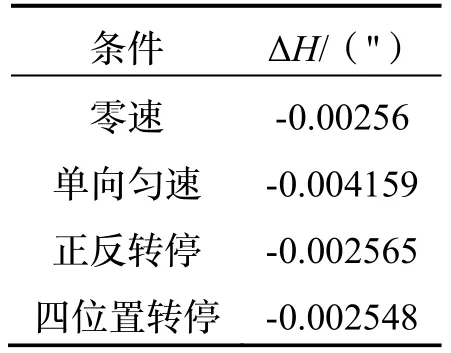
表1 仿真20 min 后航向角誤差Tab.1 Heading error after 20 minutes of simulation
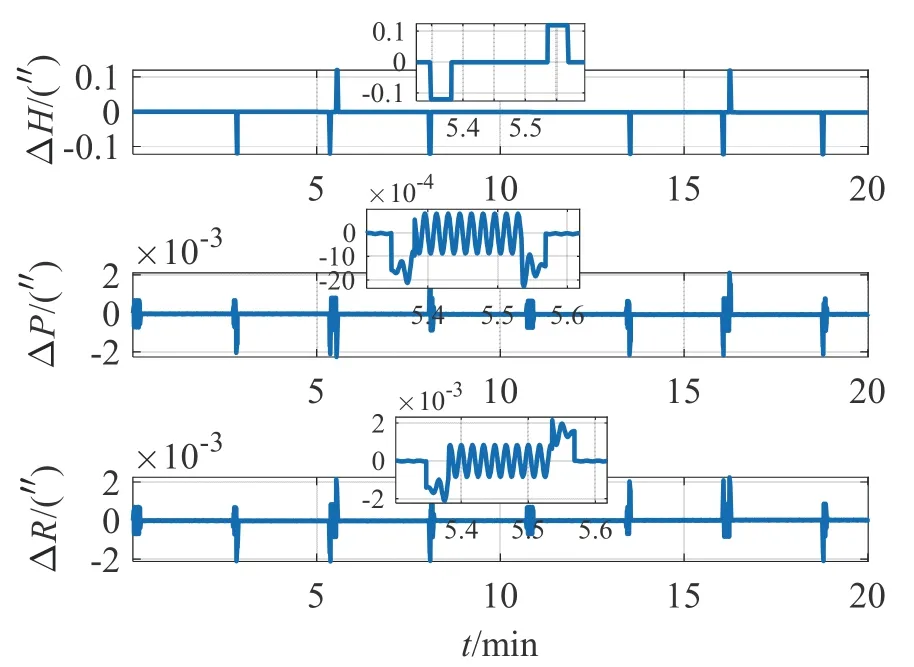
圖4 四位置轉(zhuǎn)停下姿態(tài)誤差Fig.4 Attitude error under four-position switch-stop
3.2 四位置轉(zhuǎn)停下基于角速率的多子樣旋轉(zhuǎn)矢量算法對(duì)圓錐誤差影響仿真
仿真總體條件設(shè)置如下:半錐角α為1 °,圓錐運(yùn)動(dòng)頻率為1 Hz,旋轉(zhuǎn)角速度ωr=16 °/s,旋轉(zhuǎn)角加速度ar=8 °/s2,陀螺采樣周期T=0.005 s,仿真時(shí)間20 min,假設(shè)b系相對(duì)n系做典型圓錐運(yùn)動(dòng)。四位置轉(zhuǎn)停的順序?yàn)椋? °→180 °→270 °→90 °→0 °,轉(zhuǎn)位機(jī)構(gòu)的旋轉(zhuǎn)角度和角速度如圖5所示,包括勻加速、勻速、勻減速和停轉(zhuǎn)四個(gè)階段,停轉(zhuǎn)時(shí)間為2.5 min。分別采用基于角速度的三子樣、四子樣和五子樣等效旋轉(zhuǎn)矢量算法對(duì)單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)的圓錐誤差進(jìn)行補(bǔ)償后,其姿態(tài)誤差分別如圖6、圖7 和圖8所示。
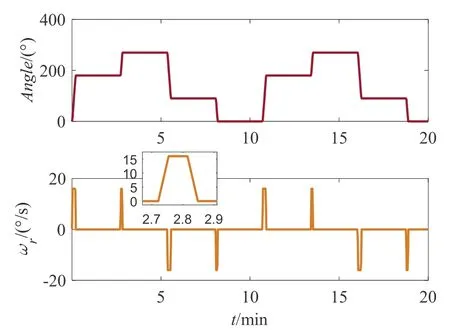
圖5 轉(zhuǎn)位機(jī)構(gòu)的角度和角速度變化Fig.5 Change of angle and angular velocity of indexing mechanism
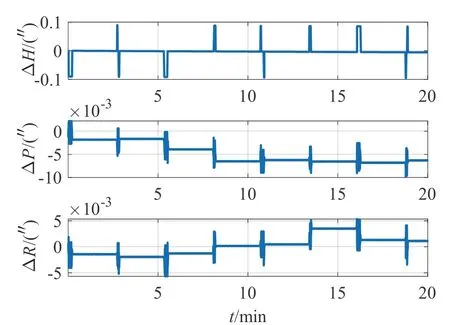
圖6 三子樣算法姿態(tài)誤差Fig.6 Attitude error of triple-sample algorithm
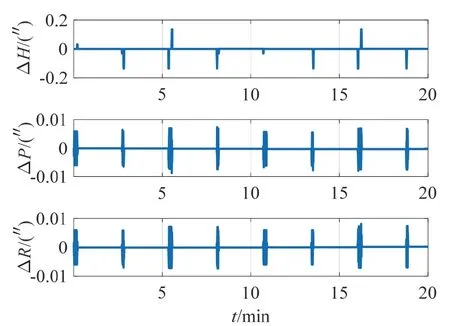
圖7 四子樣算法姿態(tài)誤差Fig.7 Attitude error of four-sample algorithm
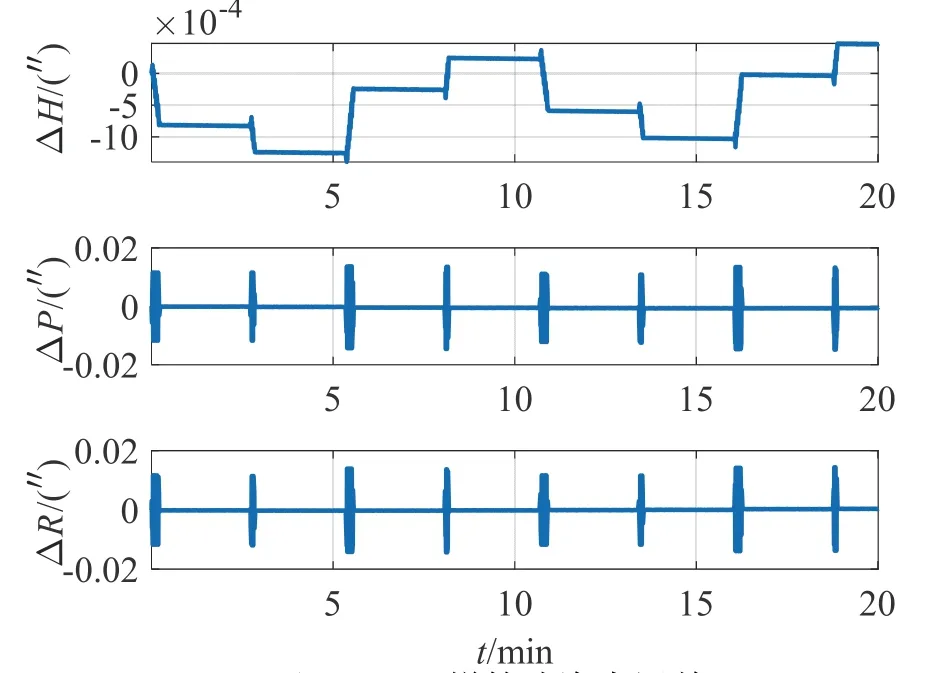
圖8 五子樣算法姿態(tài)誤差Fig.8 Attitude error of five-sample algorithm
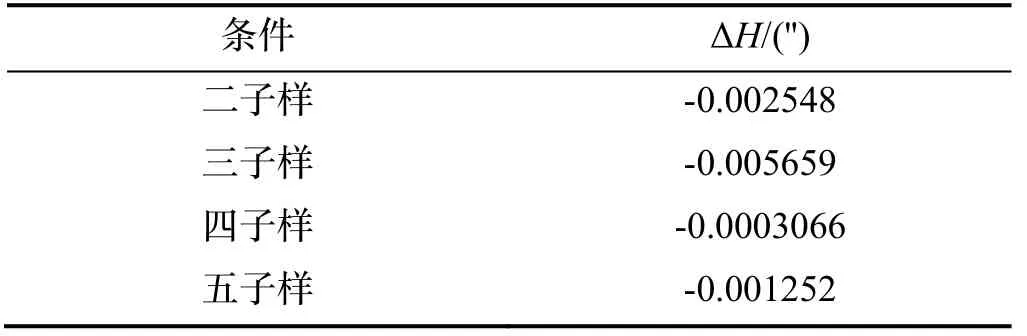
表2 停轉(zhuǎn)階段最大航向角誤差Tab.2 Maximum heading error during stop phase
對(duì)比圖4、圖6、圖7 和圖8,可以看出,在陀螺采樣頻率固定的情況下,由于不同子樣算法的姿態(tài)更新周期不同,導(dǎo)致圓錐誤差補(bǔ)償效果未因子樣數(shù)的增加而提高。其中三子樣補(bǔ)償后的水平姿態(tài)誤差最大且呈發(fā)散趨勢(shì),五子樣補(bǔ)償后的航向角誤差呈階梯式變化。由表2 知,采用四子樣補(bǔ)償算法下的航向角誤差最小,且水平姿態(tài)角誤差呈現(xiàn)周期變化,補(bǔ)償效果相對(duì)較好。結(jié)合工程實(shí)際中IMU 輸出頻率固定和計(jì)算實(shí)時(shí)性要求,可采用基于角速率的四子樣補(bǔ)償算法。
4 總結(jié)與展望
本文通過理論分析和仿真,得出以下結(jié)論:
(1)單軸RINS 的圓錐誤差及其補(bǔ)償后的剩余誤差大于SINS 中的誤差,通過增加基于角速率/角增量的旋轉(zhuǎn)矢量算法的子樣數(shù)不能無限提高圓錐誤差補(bǔ)償精度;轉(zhuǎn)位方案會(huì)影響圓錐誤差的補(bǔ)償精度,四位置轉(zhuǎn)停方式的誤差補(bǔ)償效果最好。
(2)在四位置轉(zhuǎn)停方案中,啟停階段的航向角誤差會(huì)急劇增大,其持續(xù)時(shí)間在10 s 左右,雖然對(duì)RINS的導(dǎo)航定位解算影響不大,但對(duì)以RINS 為主的組合導(dǎo)航系統(tǒng)來說可能會(huì)造成濾波校正后的結(jié)果變差,故應(yīng)盡量降低RINS 啟停頻率或延長停轉(zhuǎn)時(shí)間。
(3)RINS 中圓錐誤差隨載體搖擺幅度和搖擺頻率的增大而增大;現(xiàn)有圓錐算法大都在假設(shè)陀螺輸出無誤差的前提下設(shè)計(jì)姿態(tài)誤差補(bǔ)償系數(shù)且其實(shí)際精度尚未得到驗(yàn)證,然而陀螺輸出信號(hào)中包含了隨機(jī)誤差、安裝誤差、標(biāo)度因素誤差和量化等誤差,導(dǎo)致實(shí)際信號(hào)中難以保留理論運(yùn)動(dòng)假設(shè)下的全部特性,進(jìn)而造成圓錐誤差補(bǔ)償效果不理想,因此如何提高高動(dòng)態(tài)條件下圓錐誤差的實(shí)際補(bǔ)償精度是下一步的研究方向。