GPS-RTK/UWB 緊組合精密動態定位性能分析
2021-05-24 04:50:58王生亮劉根友高銘曹士龍肖恭偉趙文浩
全球定位系統 2021年2期
王生亮,劉根友,高銘,曹士龍,肖恭偉,趙文浩
(1.中國科學院精密測量科學與技術創新研究院 大地測量與地球動力學國家重點實驗室,武漢 430077;2.中國科學院大學 地球與行星科學學院,北京 100049)
0 引言
GPS 的建成和投入使用極大地改變了傳統的測繪方式,其中實時動態(RTK)定位技術可以獲取厘米級定位精度,廣泛應用于定位導航、工程測量等領域中[1-2].RTK 技術需要一臺基準站和一臺流動站接收機同時觀測可見衛星,然后基準站通過通信鏈路發送偽距、載波相位改正信息給流動站,流動站通過差分處理后獲得相對于基準站的高精度的位置坐標[3].目前RTK 技術已相當成熟,但是在一些特殊復雜環境下,如城市峽谷、樹下遮擋、露天礦底部,流動站觀測值存在多路徑誤差或由于可視衛星空間幾何構型差、數量不足等原因造成無法獲取高精度的固定解,只能得到低精度的浮點解甚至無法定位,嚴重影響了工程測量的需求[4].目前針對如何增強RTK 技術已有大量的研究,如星基增強、偽衛星增強、移動通信增強、多源傳感器增強[5-8]等.
超寬帶(UWB)技術是于2002 年左右才開始大力發展起來的一種短距離通信、定位系統,其采用獨特的脈沖信號,具有信號抗干擾能力強、通信容量高、抗多徑能力強、時間分辨率高等優點,因此在短距離室內定位領域具有非常明顯的優勢[9-11].目前UWB 系統采用的信號體制主要有到達時間(TOA)、到達時間差(TDOA)、信號飛行時間(TOF)、雙向測距(TWR)等[12].將UWB 與GPS 組合來增強定位能力其優勢在于UWB 系統成本低、復雜度低、抗多路徑效應強、測距精度高,且UWB 主要在地面附近布設不受高處遮擋物影響[13-15].因此將UWB 與RTK技術進行組合定位可以有效彌補復雜環境下RTK 無法獲取高精度定位結果的缺陷,且緊組合可以充分利用觀測值比GPS-RTK 更有優勢.但UWB 系統也有自身的不足,例如有限的測距范圍,需要按需自行布設等[16-18].
本文首先介紹了UWB 定位系統的原理和基本觀測方程,然后給出了GPS-RTK/UWB 緊組合的數學模型,并給出了詳細的數據處理流程.在滑軌推車動態定位實驗中,通過設置不同的截止高度角和人為遮擋干擾方式模擬城市峽谷或露天礦井底部等復雜環境,對GPS-RTK/UWB 緊組合的性能進行詳細分析.
1 GPS-RTK/UWB 緊組合數學模型
1.1 UWB 定位原理
UWB 是近年來興起的一項新技術,其不需要傳統通信體制中的載波,而是通過發送和接收納秒及以下的極窄脈沖來傳輸數據,頻率范圍在3.1~10.6GHz,具有傳輸速率高、穿透能力強、定位精度高等優點,目前在室內外定位領域已得到了廣泛的應用.
UWB 定位系統包括基站(BS)、標簽節點(Tag)及定位服務器,該系統通過BS 對Tag 節點測量高精度的TOA、TDOA、TOF 后進行定位.基于TDOA定位原理的UWB 系統僅需與BS 之間保持高精度時間同步即可,降低了Tag 與BS 之間時間同步的要求.三維定位時測量Tag 到4 個及以上BS 之間的TDOA測量值,多個TDOA 觀測值之間建立的雙曲面即可交會出Tag 的位置,基于TDOA 二維平面定位原理如圖1 所示:UWB 三維定位時,設主基站BS1 坐標為(X1,Y1,Z1),第i個基站BSi的已知坐標為(Xi,Yi,Zi),其中i=(2,……,p),Tag 的待估位置為(x,y,z),令Tag 到BSi之間的距離為Ri,Ri,1為Tag 到主BS 和從BS之間的TDOA,建立方程
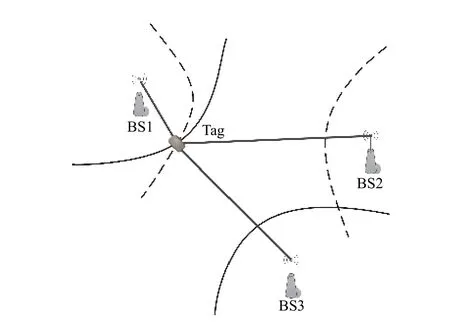
圖1 TDOA 二維平面定位原理
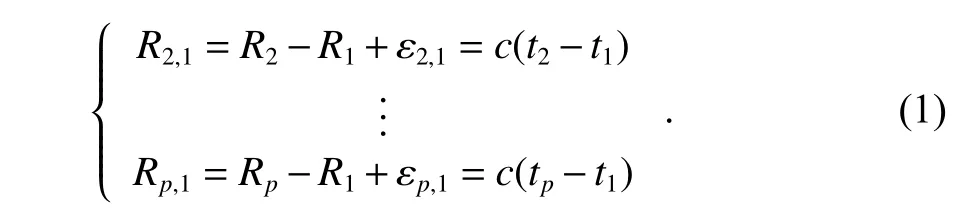
對于采用TDOA 測量值進行定位的UWB 系統,由于?Ri=Ri?R1中均存在R1,因此各?Ri之間是相互關聯的,此時TDOA 測量值的協方差矩陣可表示為
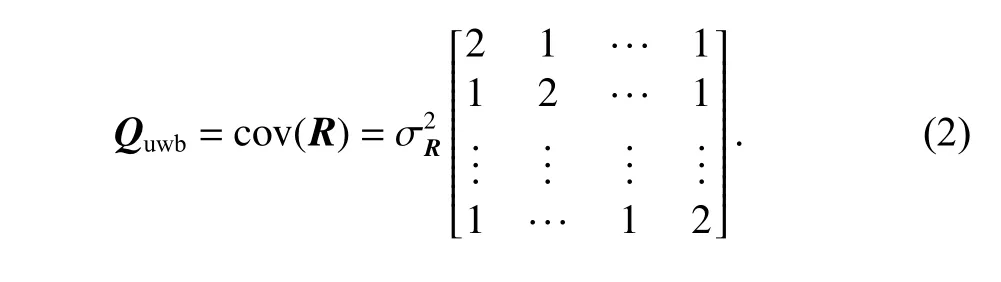
式中,一般情況下σR可取為0.1m,或根據UWB 實際測距精度評估結果確定即可.
1.2 GPS-RTK/UWB 緊組合數學模型
GPS-RTK 一般是先進行基準站與流動站站間單差,再進行衛星間求雙差,設基準站為m,移動站為r,對衛星p、q 的雙差觀測方程為

將UWB 標簽在近似位置(x0,y0,z0)處采用泰勒級數展開后并化簡可得誤差方程
式中:QLL表示觀測向量L的協方差矩陣;Factor表示觀測值類型的權分配因子(載波相位賦為1;偽距賦為100);a、b通常同時取0.003m,el為衛星高度角.
綜合以上GPS 和UWB 隨機模型,GPS-RTK/UWB 緊組合觀測量的隨機模型如下:
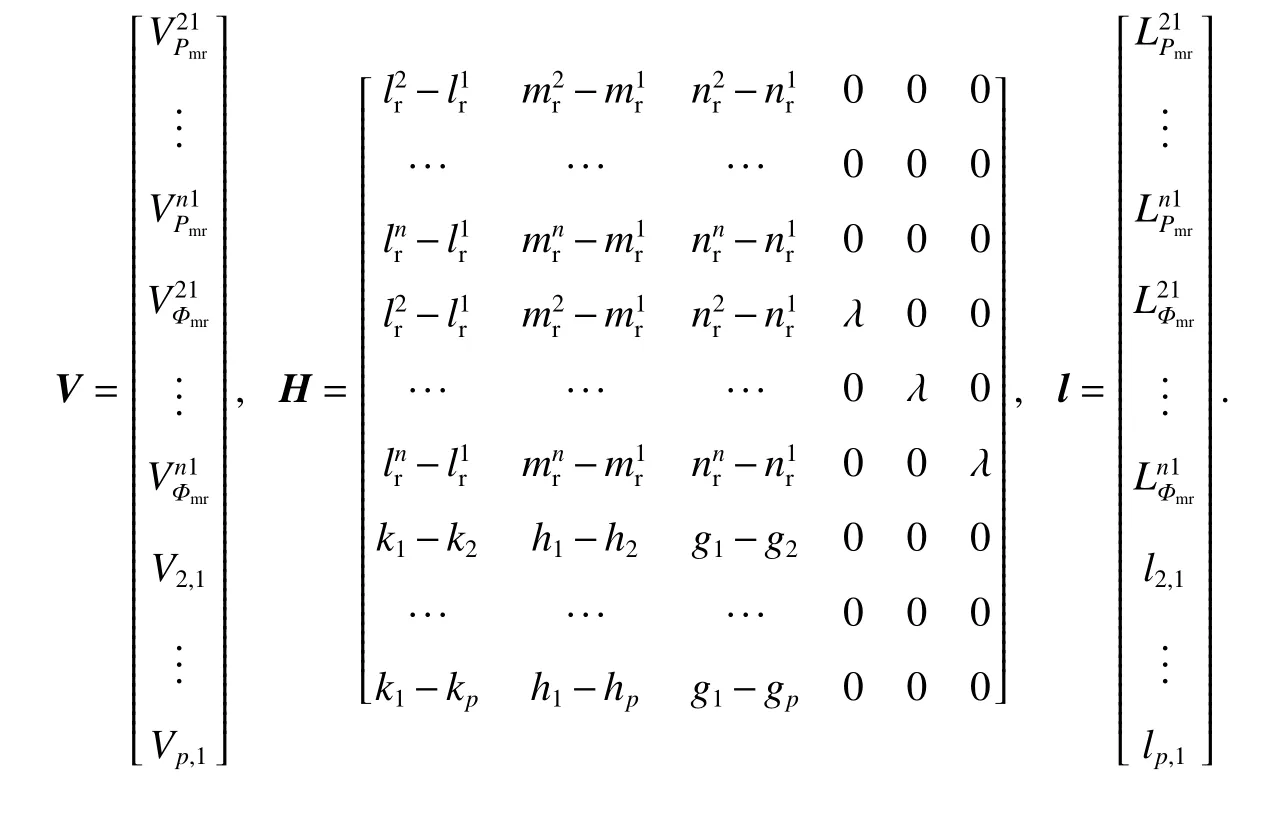
根據式(3)和式(4)合并后組成間接平差誤差方程如下:

本文采用最小二乘平差原理進行參數估計

式中: P為GPS-RTK/UWB 緊組合權陣,即式(6)中協方差矩陣QRTK/UWB的逆矩陣.從式(8)中將模糊度浮點解及其協方差陣從最小二乘得到的參數估計值及其方差-協方差陣中提取出來,作為最小二乘降相關(LAMBDA)算法的輸入參數,并根據Ratio 檢驗判斷模糊度固定是否成功,設置其最小限值為3.如果固定成功,將固定解代入到參數估計方程中得到基線固定解,否則,直接輸出浮點解.
1.3 數據處理流程
本文進行的GPS-RTK/UWB 緊組合實驗數據處理流程如圖2 所示.具體步驟如下:
步驟1:讀取UWB 基站位置坐標和TDOA 觀測量并預處理;
步驟2:讀取GPS 基準站、移動站觀測數據及廣播星歷數據,并與UWB 觀測數據同步匹配;
步驟3:使用廣播星歷計算衛星位置、SPP 解算流動站近似坐標和基線近似長度;
步驟4:根據可視衛星的高度角選擇參考衛星,形成GPS 雙差觀測值;
步驟5:組成GPS-RTK/UWB 緊組合誤差矩陣、根據隨機模型組成觀測值權陣;
步驟6:采用最小二乘法求解待估參數及其方差-協方差,迭代多次;
步驟7:將得到的浮點模糊度和相應的協方差矩陣作為LAMBDA 算法的輸入參數,如果Ratio>3,則模糊度固定成功并代入到誤差方程獲取其他參數的固定解;否則,輸出浮點解;
步驟8:判斷如果沒有到達最后歷元,則重復上述過程,進入下一歷元直到所有觀測數據解算完畢.

圖2 GPS-RTK/UWB 緊組合數據處理流程圖
2 GPS-RTK/UWB 緊組合性能分析
2.1 實驗數據
實驗采用兩臺Trimble R9 接收機分別作為基準站和移動站.基準站位安置于中國科學院精密測量科學與技術創新研究院(東湖園區)導航樓樓頂固定觀測墩,移動站安置于辦公樓樓頂天臺,進行滑軌推車實驗.UWB 采用國內尋蹤科技公司的TracLocation 系統,共布設4 個UWB 基站,其位置通過RTK方式事先精確測定.GPS 天線和Tag放置在同一垂線上,且其天線相位中心差距提前測定并在數據預處理過程中進行補償,如此可保證GPS 天線相位中心與Tag 定位中心的統一.如圖3 所示,解算模式分別為GPS-RTK和GPS-RTK/UWB 緊組合兩種模式,通過人為短時遮擋方式和設置不同的截止高度角模擬城市峽谷或露天礦井底部等局部復雜環境下的動態定位,分別設置截止高度角為10°、20°、40°,以高精度后處理相對定位結果作為參考真值進行統計分析.觀測時間總長約為16min,有效觀測歷元總數為944 個,第1—778個歷元為無遮擋時段,從第779 個歷元開始人為遮擋干擾流動站GPS 天線.
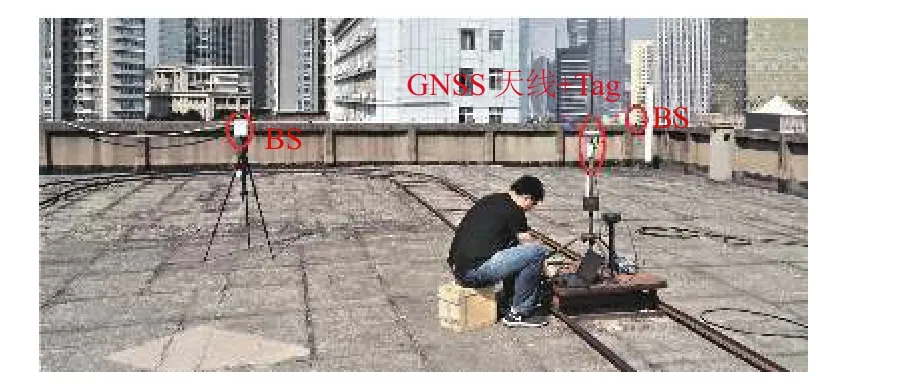
圖3 樓頂滑軌推車動態實驗部分現場
2.2 實驗結果分析
圖4、圖5 分別給出了不同截止高度角情況下的可用觀測值數量和位置精度因子(PDOP),可以看出,隨著截止高度角增加,GPS 可用觀測衛星數量逐漸減少,其中當截止高度角為40°時,GPS-RTK 共視衛星僅為3 顆,無法進行解算,參與統計的有效觀測歷元527 個;而GPS-RTK/UWB緊組合模式比GPS-RTK模式有效增加了可用觀測值的數量,并有效地降低了PDOP 值.
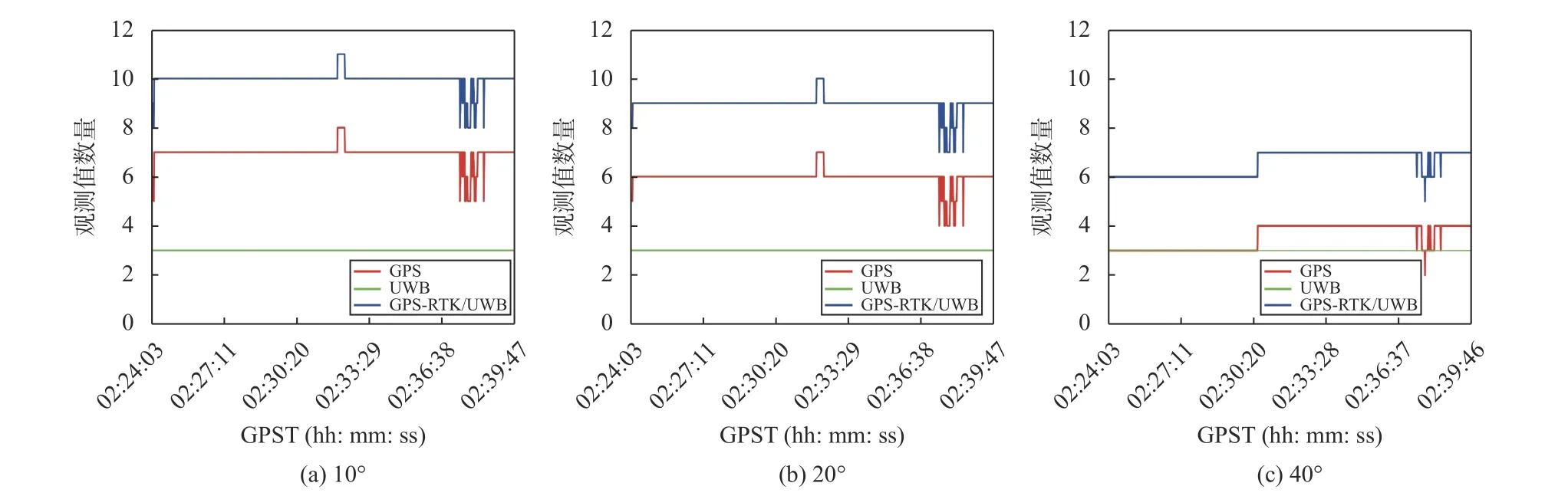
圖4 不同截止高度角情況下的可用觀測值
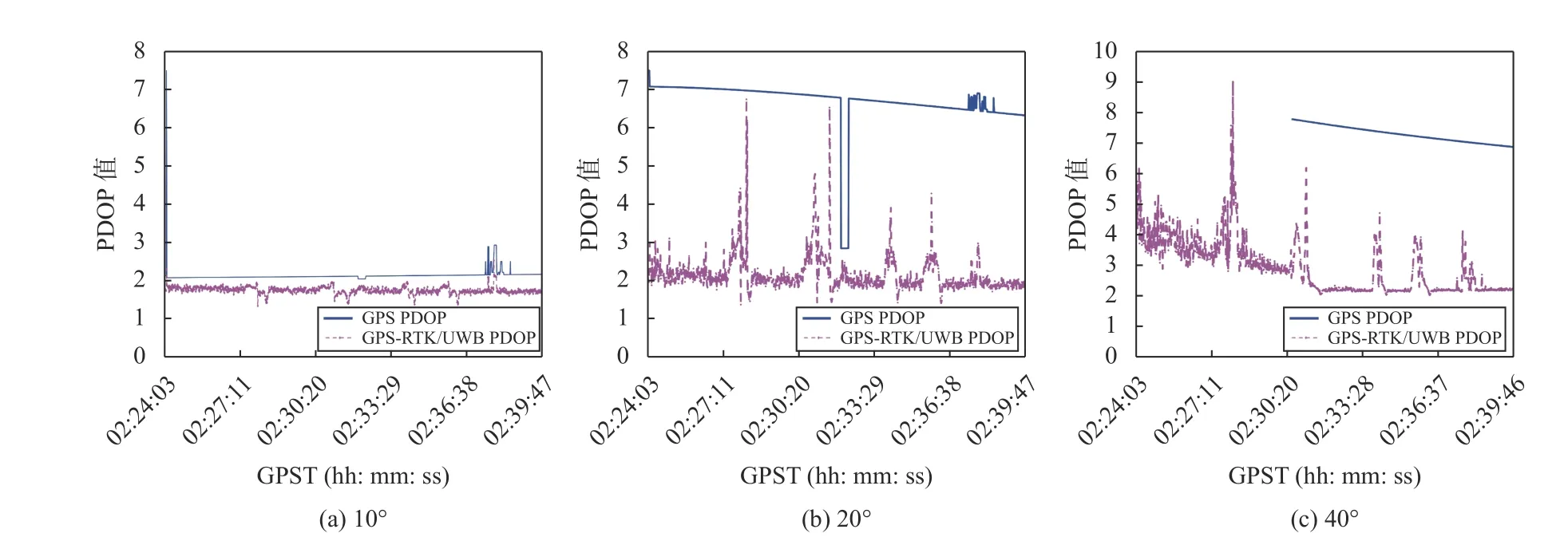
圖5 不同截止高度角情況下的PDOP 值
表1 給出了GPS-RTK 和GPS-RTK/UWB 緊組合模式在不同截止高度角情況下的整周模糊度固定率統計情況,圖6 和圖7 分別給出了GPS-RTK 和GPS-RTK/UWB 緊組合模式在不同截止高度角情況下的小推車動態軌跡.可以看出在低截止高度角(10°和20°)情況下,GPS-RTK 在推車起始、終止位置存在較多的浮點,這是由于該位置人員走動及人為故意遮擋干擾天線來模擬復雜環境導致的GPS 觀測質量下降,整周模糊度無法固定,浮點解精度較差,GPS-RTK/UWB 組合后比GPS-RTK 整周模糊度固定率均有不同程度的提高,平面軌跡更加平滑,起始、終止位置的浮點明顯減少.在截止高度角為40°情況下,GPS-RTK 模式大部分歷元為浮點解,整周模糊度固定率僅20.93%;GPS-RTK/UWB 組合后整周模糊度固定率達到93.96%,顯著提升了固定率,浮點解精度也得到了明顯改善.
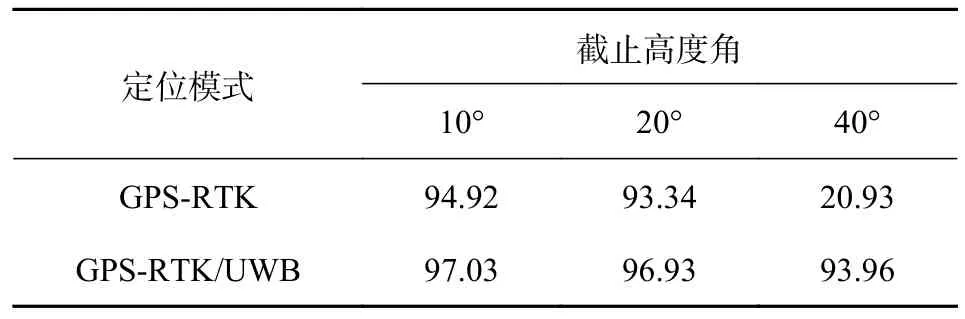
表1 不同截止高度角時的模糊度固定率 %
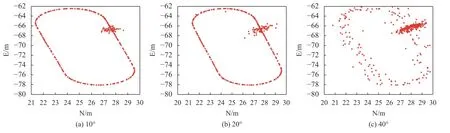
圖6 GPS-RTK 在不同截止高度角情況下的小推車動態軌跡
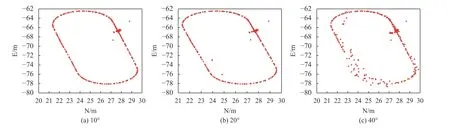
圖7 GPS-RTK/UWB 緊組合在不同截止高度角情況下的小推車動態軌跡
以高精度商業軟件IE 事后處理的結果(截止高度角10°,正反向平滑濾波)為真值參考,表2、表3、表4 分兩個時間段分別給出了截止高度角為10°、20°、40°的結果統計情況.表2 中,截止高度角為10°時,GPS-RTK 無遮擋時段動態定位平面精度優于3cm,高程精度優于5cm,GPS-RTK/UWB 緊組合在N、E、U 方向上均方根(RMS)值分別減小47.8%、36.4%、34.8%;人為遮擋時段 GPS-RTK/UWB緊組合平面RMS 為厘米級,高程RMS 為分米級,且比GPS-RTK 模式N、E、U 方向上RMS 值分別減小了74.8%、85.7%、21.3%.
聯合表3、4 可以看出,隨著截止高度角增大,可觀測衛星變少,PDOP 增大,GPS-RTK 動態定位精度降低,GPS-RTK/UWB 緊組合比GPS-RTK 模式在N、E、U 方向上RMS 值均有大幅的降低,即UWB 在特殊復雜環境下能對GPS-RTK起到很好的增強作用.在截止高度角為40°的環境下,GPS 有效觀測歷元明顯減少,固定解比例僅20.93%,N、E、U 方向精度均為分米至亞米級;GPS-RTK/UWB 緊組合后極大地改善了觀測狀態,固定解比例顯著提升到93.96%,平面RMS 值降低至厘米級,高程RMS 值降低至分米級.
綜合來看,GPS-RTK 在良好的觀測環境下三維動態定位精度優于5cm,復雜環境下RTK 精度顯著降低,但GPS-RTK/UWB 緊組合后固定解比例明顯提升,N、E 方向精度保持在厘米級,但U 方向上的RMS 值提升比例低于N、E 方向,這是由于UWB基站與GPS 接收機基本布設在同一平面內,存在不同UWB 基站在高程方向上布設很難拉開較大距離的局限性,因此其對平面的貢獻要明顯優于對高程方向的貢獻,實際應用中應盡量依據場景將UWB 基站布設為高低錯落、左右均勻分布更有利于定位精度的提升.
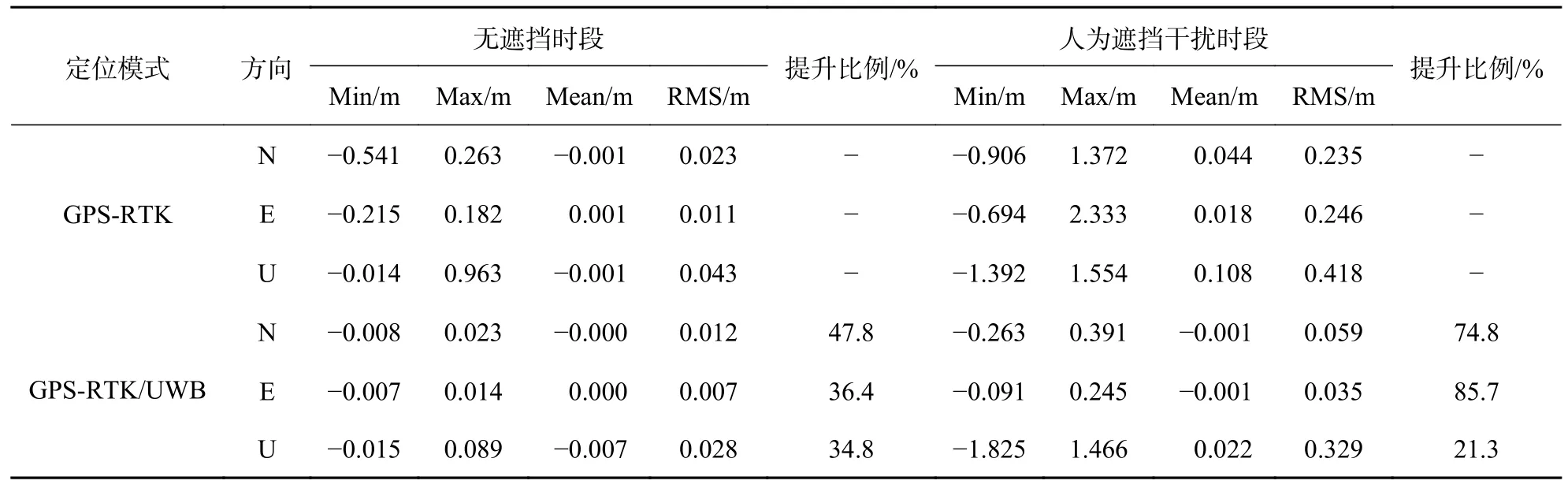
表2 截止高度角10°時小推車位置誤差統計
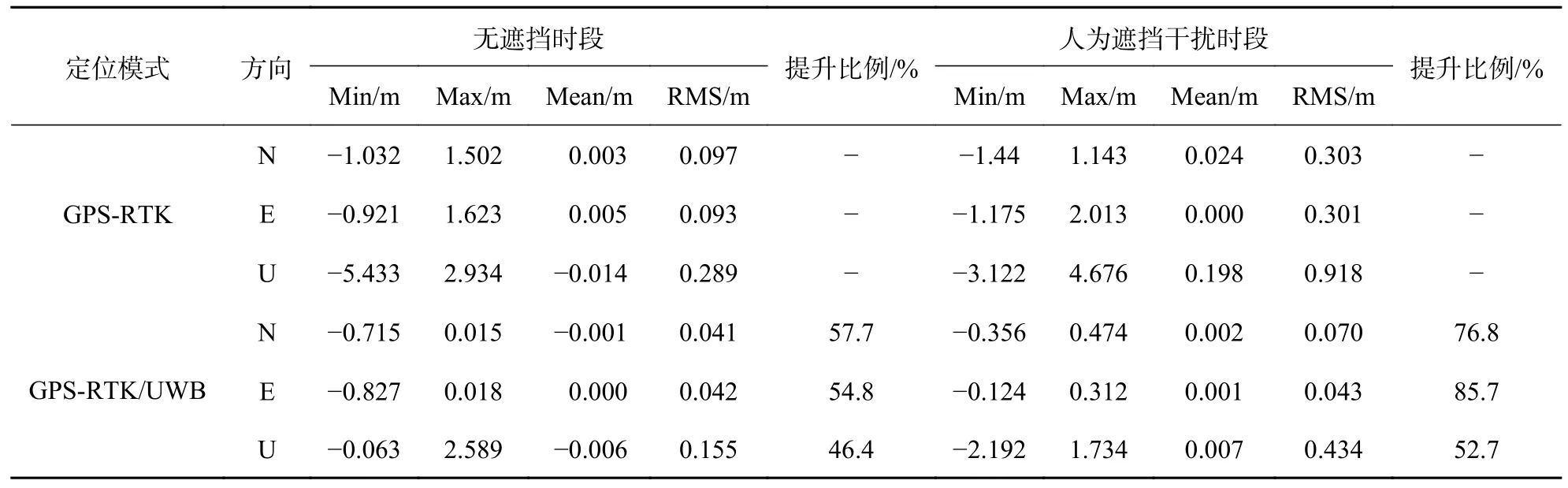
表3 截止高度角20°時小推車位置誤差統計
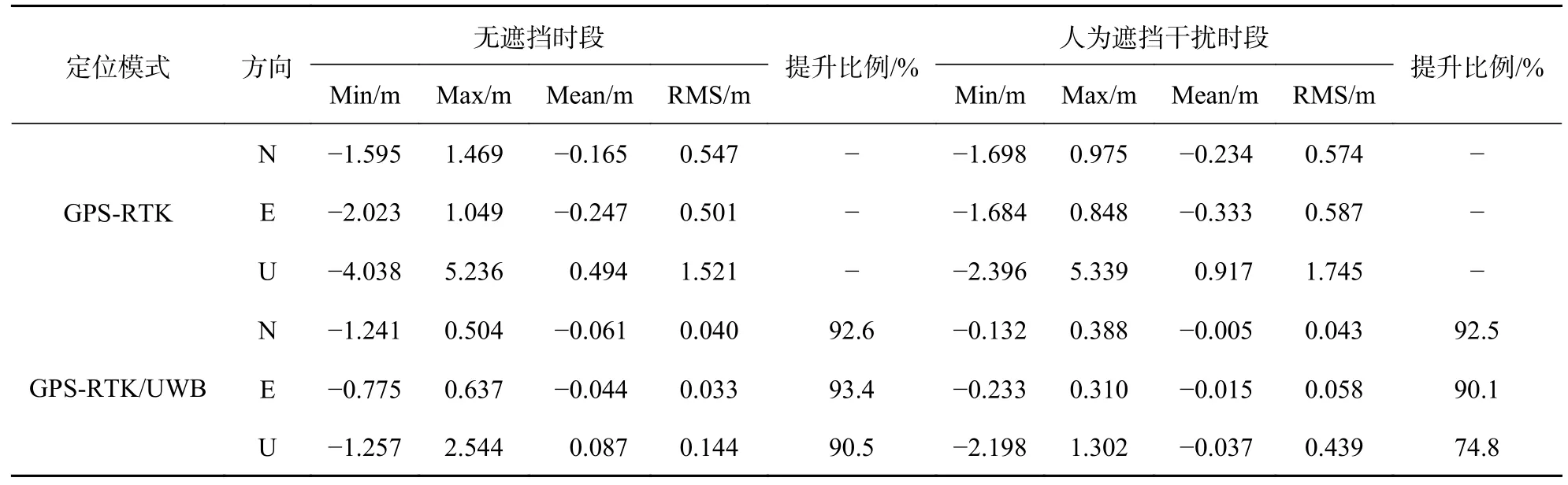
表4 截止高度角40°時小推車位置誤差統計
3 結束語
針對復雜環境下GPS-RTK 定位精度低甚至由于可觀測衛星數量不足無法定位的情況,開展了GPS-RTK/UWB 緊組合動態精密定位性能分析,在不同的截止高度角和人為干擾情況下分析了滑軌小推車動態定位結果,得到以下結論:
1)GPS-RTK/UWB 緊組合比GPS-RTK 模式可以有效增加觀測值數量,降低PDOP 值改善可用觀測值的幾何結構;
2)在截止高度角較低(10°和20°)且無遮擋的良好觀測環境下,GPS-RTK 的精度較高,GPS-RTK/UWB緊組合能進一步提高固定解比例和定位精度;對人為遮擋干擾情況下的定位精度有明顯大幅提升;
3)在截止高度角為40°的復雜環境下,GPS-RTK有效觀測歷元減少,固定解比例僅20.93%,N、E、U 方向精度均為厘米至分米至亞米級;GPS-RTK/UWB緊組合后改善了觀測值幾何結構,固定解比例顯著提升至93.96%,平面精度保持在厘米級,高程精度為分米級,仍能滿足一定的工程需求.
本文研究由于UWB 基站布設在高程方向上差距不大,對GPS-RTK/UWB 緊組合后在U 方向的精度提升比例低于N、E 方向.后續研究包括不同UWB基站布設情況下與GPS 組合的效果分析及其進一步與BDS、GLONASS、GALILEO 等多系統進行組合.