區域導航系統站間時間同步野值剔除方法研究
2021-05-20 06:55:10黃穎濤
現代導航 2021年2期
關鍵詞:測量
黃穎濤
(中國電子科技集團公司第二十研究所,西安 710068)
0 引言
在區域導航系統中,基準站站間時間同步是系統自主運行的基礎,時間同步精度也是導航系統實現高精度測量、定位與導航的前提。目前,較為常用的無線電技術是采用雙向時間比對方法,即利用基準站間時延測量信號的相互播發與接收,通過同時刻雙向時延測量值比對來實現高精度時間同步。但該方法在遠距離無線動態下,特別是在高動態條件下,因受站間無線通信手段的限制,不能及時獲得同時刻的比對數據,使時差測量值出現突跳,這將會導致時間頻率跟蹤環路波動,且動態越大,帶來的波動越大,嚴重影響到基準站間的時間同步性能。因此需要在實時獲取基準站間時鐘基準偏差測量值的基礎上,進行時差野值的判斷、剔除以及時差濾波處理,從而實現站間的高精度時間同步建立和維持。
1 雙向時間比對方法
雙向時間比對設備通過無線電交換時間同步信號,如果這個無線電通信鏈路是對稱的或者近似對稱的,那么雙向信號傳輸的延遲將得到很好的對消,這就是雙向時間比對系統所依據的基本原理。雙向時間比對原理如圖1所示。
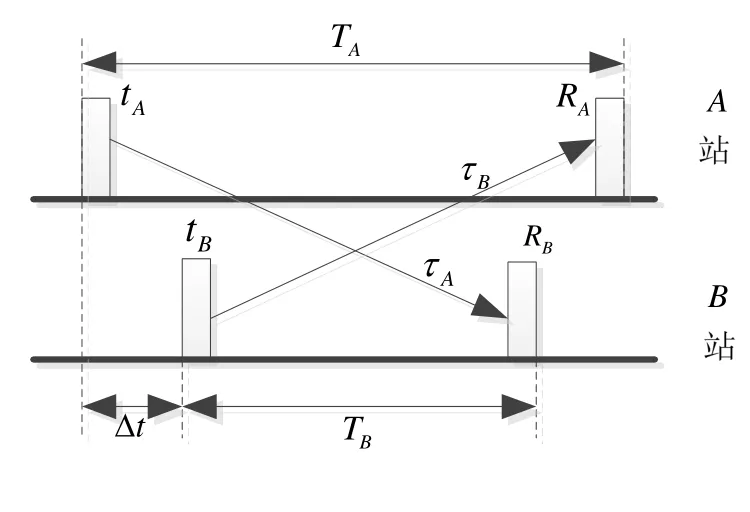
圖1 雙向時間比對原理示意圖
如圖1所示,Δt為A、B兩站時差,A、B兩站發射設備與接收設備的時延分別為(tA,RA)和(tB,RB),A站到B站路徑傳播時延為τ A,B站到A站路徑傳播時延為τ B,則兩計數器測量值分別為:
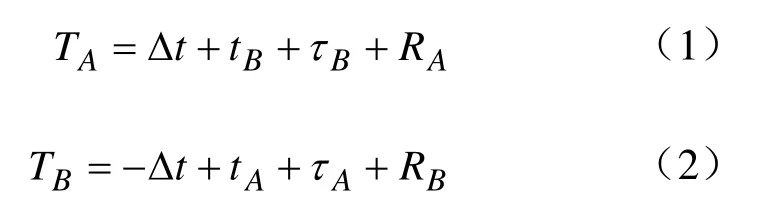
因為A、B兩站站間的空間傳播路徑相同,即τA=τB。聯立式(1)和式(2)得:

式中,(tA,RA)和(tB,RB)是設備的硬件時延,可以通過事先標定得到,計數器測量值已知,因此可得到兩站的時差值Δt。從基準站即可依據時差Δt調整本地的時間,保持與主基準站的時間同步。
2 區域導航站間時間同步時差計算
基于雙向時間比對,系統間導航基準站播發和接收設備硬件時延固定和站間兩個收發天線之間距離相同,通過從基準站與主基準站之間區域導航信號傳播時延的相互測量,建立雙向比對時差測量模型。假設主基準站為A,從基準站為B,則有:
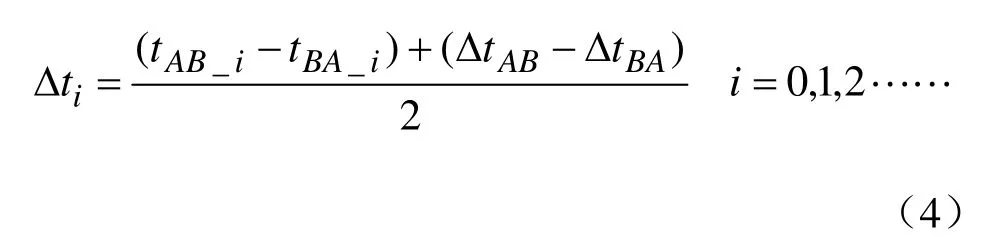
式中,Δti為i時刻從基準站與主基準站的時差值;ΔtAB為主基準站A發射和從基準站B接收之間的硬件時延;ΔtBA為從基準站B發射和主基準站A接收之間的硬件時延;tAB_i和tBA_i分別為在當前i時刻,主基準站A和從基準站B之間導航信號互相收發的傳播時延。
在動態實時同步過程中,會因各種突變因素帶來由測量數據突跳產生的時差值野值,若不剔除,會嚴重影響到時間同步性能。
3 時差野值剔除及濾波方法
在靜態情況下,站間時間同步相對穩定,而動態情況下,由于站間實時數據的獲取會有延遲,所以實時數據野值剔除分為兩步,即先需要對觀測數據進行外推預測,然后再進行野值的判斷及剔除。
對時差值的外推預測方法采用五點線性預測法,即通過當前時刻i及前4 s 的時差值對下一時刻i+1 的時差值進行預測,預測公式為:
式中,系數權重Pj=(3j-7)/10;為時差值預測值。
在野值剔除過程中,設定其判決門限值M,將i時刻的時差測量計算值Δti與時差預測值作比較,若其差值小于判決門限M,則可判斷此時差測量計算值Δti有效可用,將其送入濾波器作后續處理,否則此時刻將采用時差五點線性預測值。具體判決過程如下:

式中,為預測時刻前連續5 s 的時差平均值,判斷門限取值選為其均方根σi的3 倍。
在將野值剔除后得到的時差值送時鐘頻率鎖定環路之前,為保障時差值的平穩性,需對時差值進行線性濾波處理,將濾波處理后的時差值送入時鐘頻率鎖定環路,達到時間同步的高精度維持。濾波處理方法如式(8)所示:

式中,Δti_r為i時刻經過野值處理后的時差值;為i時刻經過濾波處理后送入時鐘頻率鎖定環路的時差值,且=0。
4 試驗驗證
利用區域導航系統設備,進行外場試驗,試驗場景為主基準站A固定在經度為114.465878°,維度為31.11754°,高度為65.44 m 的位置,從基準站B安放在船艇上,在遠離主站約1 km 的湖面上運動,運動軌跡如圖2所示。

圖2 基準站B 運動軌跡
對于試驗過程中時差值的采集記錄為1 s/次,針對外場試驗中采集的時間同步時差值數據作如下分析:在從基準站B動態過程中,與主基準站A作時間同步,時間同步維持過程中未經處理的秒差值記錄數據如圖3所示。
從圖3中可以看出,基準站B在動態狀況下,時差值趨勢在+5 ns 和-5 ns 之間波動,由于基準站B被放置在汽艇上在湖面運動,在汽艇轉彎過程中,由于湖面的波動及接收天線的角度變化,會出現因測距值突跳帶來的時差野值,若不剔除,直接送入時鐘頻率鎖定環路,則會影響時間同步的穩定性,進而影響到基準站之間的測距。
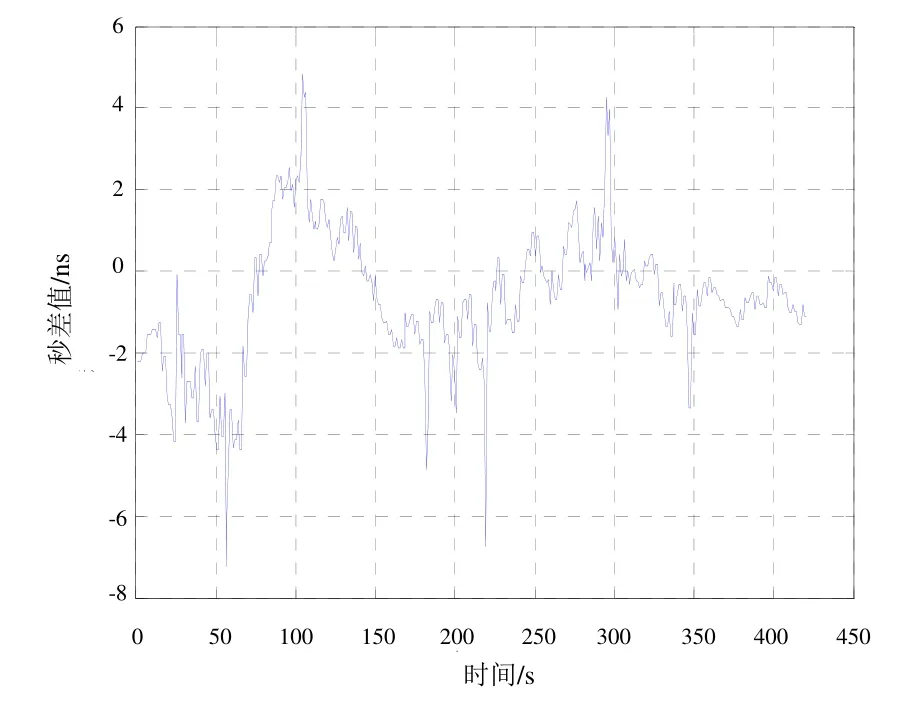
圖3 時間同步未經處理的時差值
在時差值數據采集的過程中,通過五點線性預測法對實時的時差值進行預測,可得到時差值的預測值,如圖4所示。
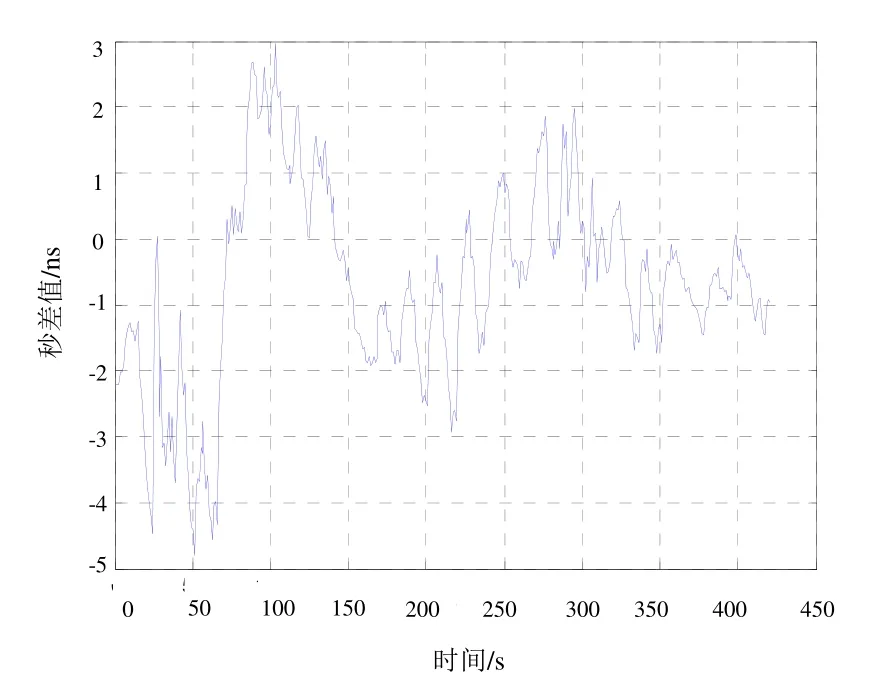
圖4 時間同步時差值的預測值
從圖4中可以看出,在基準站B動態過程中,時差值的預測值趨勢與未經處理的時差值大體相同,在-5 ns 和+3 ns 之間波動,沒有出現野值點。將時差值原始數據與預測值作對比分析,如圖5所示。
通過時差野值剔除的判決公式,可得到原始時差值與預測值的偏差值與判決門限值的關系,如圖5所示,圖中虛線為判決門限值,實線為偏差值,從圖5中可以看出,有幾處的偏差值大幅度超過判決門限值,并從局部圖6中可明顯看出偏差值與判決門限值的關系。根據判決準則,測量時差值將會被作為野值進行剔除,并將預測值作為當前時刻的時差值輸入線性濾波器中作處理,并將處理結果送到時鐘鎖定頻率環路中,最終處理結果如圖7所示,最終處理后的時差值維持了時差值原有趨勢,并有效剔除了檢測出的野值點。
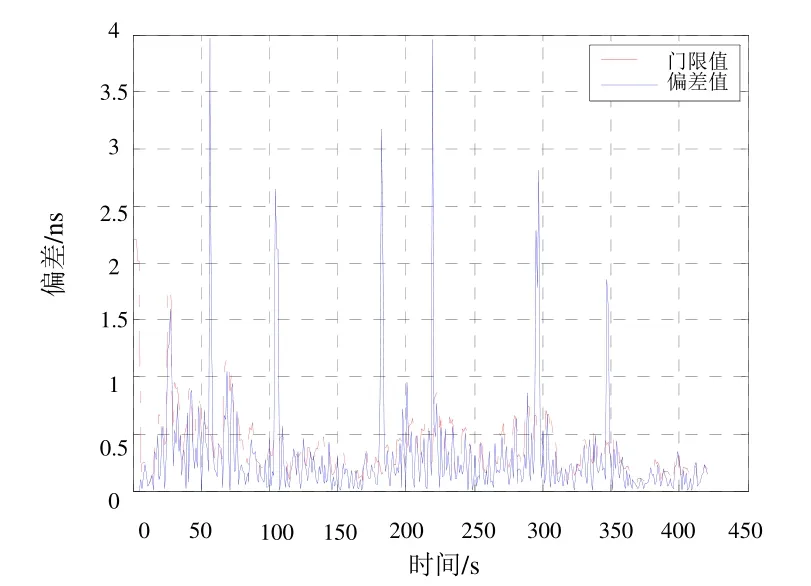
圖5 時差值與預測值的偏差及門限值
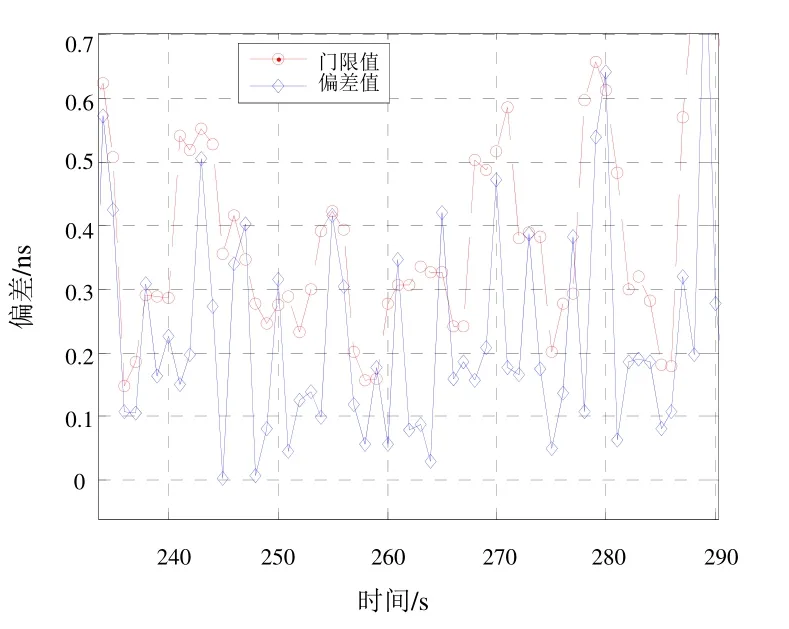
圖6 時差值與預測值的偏差及門限值(局部圖)
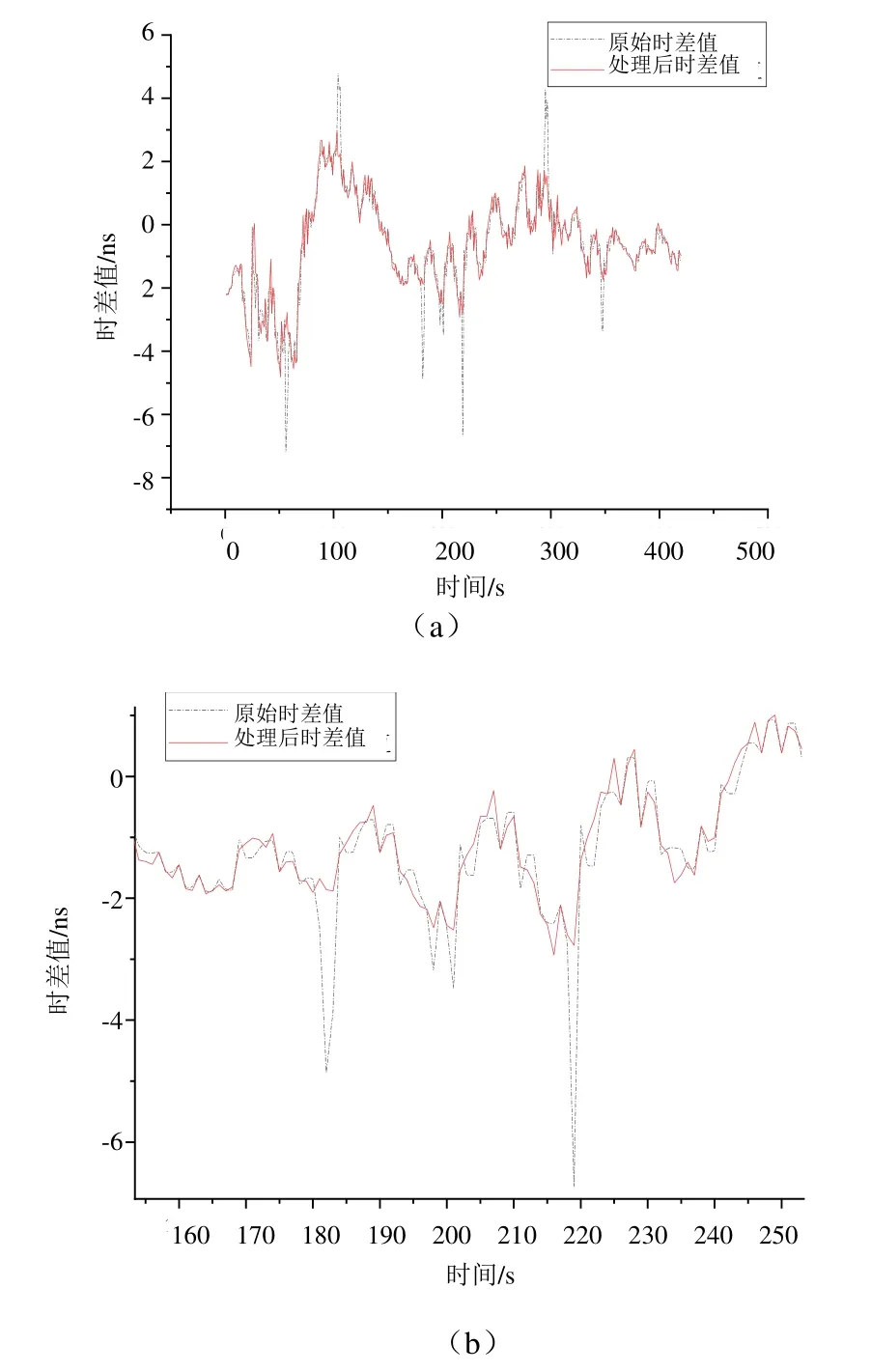
圖7 原始時差值與處理后的時差值
5 結語
在區域導航系統的時間同步中,高動態下時差值野值的出現會影響時間同步的精度,進而影響系統運行的穩定性。本文針對這一問題,提出一種時差值野值判斷剔除方法,利用實時的時差值數據進行預測和設置自適應判決門限,并對野值進行判斷并剔除。通過試驗驗證,該方法能夠有效地對時差野值進行判斷并剔除,保障了系統基準站站間時間同步的精度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00