城市軌道交通列車故障救援延誤計算與仿真
2021-05-20 01:22:36孫元廣陳紹寬
重慶交通大學學報(自然科學版) 2021年5期
孫元廣,繭 敏,金 華,陳紹寬
(1.廣州地鐵設計研究院股份有限公司,廣東 廣州 510010;2.北京交通大學 交通運輸部綜合交通運輸大數據應用技術交通運輸行業重點實驗室,北京 100044)
0 引 言
城市軌道交通系統運營過程中如發生列車故障,將會影響正常運營降低服務質量。列車故障如無法在短時間內排除,行車調度員需根據故障情況進行運營調整,對故障列車進行救援,即利用其他列車或者工程車將故障車移出正線。
國外研究主要針對運營干擾或中斷后的恢復調整與故障分析。V.CACCHIANI等[1]對鐵路系統的擾動和干擾管理與恢復算法進行研究,將系統故障分為干擾和中斷;GAO Yuan等[2]對地鐵列車運行中斷后的運行線路重排問題進行研究,將非正常運行圖分為故障階段和恢復階段進行分析;XU Xiaojie等[3]在分析列車運行中干擾管理問題中,認為故障可分為由乘客上下車、區間限速或計劃維修引起的延誤,以及由安全制動、子系統失效或事故等系統異常導致的運營中斷;ZHAN Shuguang等[4]則將故障中斷定為運營區段的完全阻斷。國外研究較少關注列車故障救援組織優化與決策。
同時,國內關于城市軌道交通列車故障救援的研究主要集中在兩個方面:① 針對故障停車線,分別從宏觀角度研究其布局和微觀角度分析其設置形式與運用。付意莊[5]從停車線備車角度對停車線設置位置與客流因素進行了分析;郭彥東[6]根據呼和浩特1號線線路及客流數據,驗證了雙列位停車線的適用性;② 針對列車故障救援組織進行分析并提出相關優化建議。陳穎斌等[7]對城軌列車故障救援的規程、人員操作和設施設備進行了分析;鄒冉[8]則對列車故障救援的影響因素和延誤效率進行分析,提出了提高救援效率的對策及建議。此外,王宏剛等[9]對列車運行狀況的影響因素進行分析,建立基于MLD理論的列車運行調度模型。總體而言,現有研究多側重于基礎設施、救援組織的定性分析以及列車的運行調整,缺少救援方式的具體劃分及影響的定量研究。
筆者對列車故障救援流程進行分析,按照救援列車選擇、救援車組運行狀態和故障列車停放位置這3類指標,對列車故障救援方式進行劃分,計算各救援方式所產生的延誤,并應用Open track軟件進行仿真驗證,為列車故障救援方案選擇提供依據。
1 故障救援作業分析
列車故障救援是指列車因動力或制動故障而無法繼續運營,需借助救援列車退出正線運營的行車組織[10],救援可劃分為故障列車自救階段和救援列車救助階段。故障車自救階段作業包括故障列車司機自救與技術協助處理。司機若無法完成自救,行車調度發布救援與清客命令,故障列車(位于車站附近)完成清客作業,與救援車進行聯系并實施防護。救援列車司機了解救援情況并準備接受行調命令(如清客命令、接受救援命令、生效動車命令),隨后將救援列車運行至故障列車位置并與其進行連掛、試拉。救援車與故障車完成連掛后需要切除故障車常用制動,隨后運行至停放位置。
根據故障位置,列車故障救援分為區間救援和車站救援,故障列車和救援列車作業流程和時間如圖1。故障車完成清客作業后需等待救援車到達,由圖1可知,救援列車和故障列車完成連掛動車前的作業時間計算如式(1),該作業時間的瓶頸為救援列車作業。救援列車的作業時間組成如式(2)[8]:

圖1 不同位置列車故障救援作業情況
T作業時間=max[T故障列車作業,T救援列車作業]
(1)
(2)
式中:T作業時間為救援作業的總時間;T故障列車作業為故障列車作業的總時間,包括故障列車司機判斷及處理、技術協助下故障處理、行車調度發布救援命令、故障列車清客作業和聯系及列車防護作業時間;T救援列車作業為救援列車的作業的總時間,包括了解救援情況、行車調度發布救援命令、救援列車清客、運行至故障位置和連掛故障車并試拉的時間;T固定作業時間為固定作業的時間,包括了解救援情況、行車調度發布救援命令、救援列車清客和連掛故障車并試拉;l救—故為救援列車與故障列車間的距離;v救援為救援列車平均運行速度。
由式(2)可知,救援列車的運行時間與救援列車與故障列車的間距和救援列車平均運行速度有關。以1~10 km間距和10~80 km/h的速度范圍得到圖2。由2圖可知,隨著救援列車到達故障點速度的增加,救援列車作業時間先迅速減小后趨于平緩,說明在一定范圍內,提高救援速度可以有效減小救援列車作業時間。若列車故障救援作業時間上限取1 800 s[11],救援列車與故障列車連掛完成前的作業時間約為720 s,則救援車組的運行時間約為1 080 s。圖2中各救援距離的時間曲線,與最大運行時間的交點所對應的救援速度,為該救援距離下的速度下限。完成連掛后的救援車組從故障位置到停放位置的旅行速度,應大于該速度下限,以保障救援作業時間。
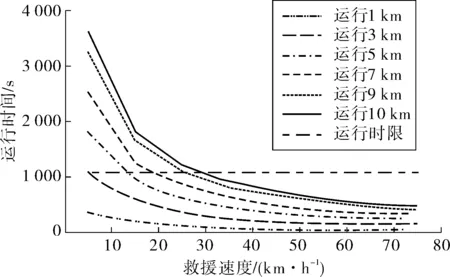
圖2 救援距離與救援速度關系
2 故障救援方式與救援延誤計算
列車故障救援方式可按救援車組的運行方向可分為牽引救援和推送救援;按停放位置可分為車輛段停放救援和配線停放救援,其中用于停放故障車的配線為停車線、折返線及越行線[12]。此外,軌道交通故障救援列車還可用車站配線存放。車輛段停放模式中故障車組運行至車輛段后影響完全消除,暫存于配線則影響未被完全消除。對于救援列車的選擇,一般選擇前序列車(或鄰線折返列車),后序列車承擔救援任務,但救援處置中不扣停前序列車而扣停后序列車。此外,救援車組推送運行通常不存在敵對方向,安全性較高。故障車輛存放于車輛段或停車場時不存在二次延誤,且便于車輛維修;而存放于配線存在二次延誤,不便于列車維修[10]。
列車救援方式的組合要素包括救援列車種類(后序列車、前序列車和鄰線列車)、車組運行方向(正向運行、反向運行和混合運行)和故障列車的停放位置(車輛段、停車場、單/雙列位停車線和車站配線)。后序列車救援優點為安全性較高,救援方式為推送、牽引和對向救援;前序列車救援的優勢是正向救援時采用牽引運行,牽引速度一般情況下大于推送速度,通常可以達到40~45 km/h[13],可減少正線運營的干擾;對于反向和對向救援,前序列車救援以推送為主,因增加延誤較少使用。
鄰線列車救援會對鄰線列車運營產生干擾,使鄰線救援列車接近并與連掛的過程產生更大的延誤。因而鄰線正向救援過程中采用牽引模式以增加速度,減少對本線運營的干擾。因此,前序列車和鄰線列車救援通常都采用正向運行方向。
筆者主要討論5種救援方式:后序列車正向救援、后序列車反向救援、后序列車對向救援、前序列車正向救援以及對向列車正向救援;救援車組目的地分別是:車輛段、貫通式單列位停車線、貫通式雙列位停車線、盡頭式單列位停車線、盡頭式雙列位停車線。
2.1 救援作業分析
救援作業中流程中,圖中符號含義如表1。
表1 各符號含義
2.1.1 后序列車正向救援
后序列車正向救援作業流程如圖3,主要作業內容包括:① 故障判斷與命令發布、② 故障處理與清客、③ 后續列車接近救援列車、④ 救援車與故障車連掛、⑤ 推送運行到前方站、⑥ 故障車在前方站清客和⑦ 推送到停放地點。

圖3 后序列車正向救援流程
2.1.2 后序列車反向救援
后序列車反向救援流程如圖4,作業內容包括:① 故障判斷與命令發布、② 故障處理與清客、③ 后續列車接近救援列車、④ 救援車與故障車連掛、⑤ 逆向牽引到后方站、⑥ 故障車在后方站清客和⑦ 牽引到停放地點。
圖4 后序列車反向救援流程
2.1.3 后序列車對向救援
后序列車對向救援作業流程如圖5。作業內容包括:① 故障判斷與命令發布、② 故障處理與清客、③ 后序列車接近救援列車、④ 救援車與故障車連掛、⑤ 推送運行到前方站、⑥ 故障車在前方站清客、⑦ 推送到渡線、⑧ 換端與徑路安排和⑨ 救援列車從渡線到停放地點。

圖5 后序列車對向救援流程
2.1.4 前序列車正向救援
前序列車正向救援作業流程如圖6。作業內容包括:① 故障判斷及救援命令發出、② 前序列車清客、③ 前序列車接近、④ 救援車與故障車連掛、⑤ 牽引運行到前方站、⑥ 故障車在前方站清客和⑦ 牽引到停放地點。

圖6 前序列車正向救援流程
2.1.5 對向列車正向救援
對向列車正向救援作業流程如圖7,作業內容包括:① 故障判斷與命令發布、② 前序救援列車到達渡線、③ 救援列車到達前序車站、④ 清客、⑤ 救援列車接近故障列車、⑥ 救援車與故障車連掛、⑦ 牽引運行到前方站、⑧ 故障車在前方站清客和⑨牽引到停放地點。

圖7 對向列車正向救援流程
2.2 救援延誤計算
列車故障救援延誤時間分為一次延誤和二次延誤兩部分。一次延誤是指,從故障發生到救援列車將故障列車救援至停放位置產生的延誤;二次延誤是指,從救援列車將故障列車救援至停放位置至救援列車完成救援(救援列車可恢復運營或臨時停放在停放點)產生的延誤。其中一次延誤由救援列車選擇、車組運行方向以及故障列車停放點的位置決定,二次延誤則由故障列車停放點的類型決定。
2.2.1 一次延誤
以救援車組(救援列車與故障列車完成連掛的車組)動車為時間節點,列車故障救援的一次延誤計算如式(3):
(3)
式中:T救援列車作業為救援列車的作業時間;T救援車組作業為救援車組作業時間;xi為0或1,表示是否有救援車組動車后的延誤修正;l故停為故障點到停放點的距離;v后車為故障車組后方列車的平均運行速度;Δh為后方列車運行的追蹤間隔與原間隔的差。
考慮到正向救援,列車將故障列車推送至停放位置時,后序列車可在保持一定追蹤距離的前提下跟隨救援列車前進,因此延誤要減去后序列車跟隨前進節省的時間l故停/v旅行(此時后續列車的旅行速度受限制)。故障列車的追蹤間隔應減去追蹤間隔變化的差異h1-h2。因此,后序列車正向救援的一次延誤時間如式(4):
(4)
式中:t判斷為故障判斷時間;t后清為后序救援列車的清客時間;l故后為故障列車離后方車站的距離;v接近為救援列車接近故障列車的平均速度;t連掛為救援列車與故障列車的連掛作業時間;l故停為故障列車與停放點的距離;v推送為連掛后救援列車推送的平均速度;t清客為故障列車的清客時間;v旅行為正常情況下的平均旅行速度;h1為正常情況下的列車追蹤間隔;h2為后序列車與救援列車之間的追蹤間隔。
反向救援列車的后序列車在救援過程中須原地等待,因此不需對后序列車前進進行修正。從安全角度考慮,不允許停放位置在救援列車的后序列車之后,防止產生沖突。后序列車反向救援的一次延誤時間如式(5):
(5)
式中:v牽引為連掛后救援列車的平均牽引速度。
同樣對于正向運行,延誤應減去后序列車跟隨前進節省的時間l故渡/v旅行,此外還應減去追蹤間隔變化的差異h1-h2。對于對線也是同樣處理,延誤要減去l渡停/v旅行,不同的是由于不知道救援列車折返時對線后序列車的位置,可能在離渡線0至h1的任何一個位置,這里定為其位置的期望h1/2,因此追蹤間隔變化的差異為h1/2-h2。后序列車對向救援的一次延誤時間如式(6):
(6)
式中:l故渡為故障列車與渡線的距離;l故渡為故障列車與渡線的距離。
與后序列車正向救援相比,主要區別在于前序列車不扣停,離故障列車較遠,接近時間長,但連掛之后牽引運行,速度更快。前序列車正向救援的一次延誤時間如式(7):
(7)
式中:t前清為前序列車的清客時間;l前清故為前序列車清客車站到故障列車的距離。
與后序列車正向救援類似,應減去追蹤間隔變化的差異h1-h2,連掛作業的流程和時間不同。對向列車正向救援的一次延誤時間如式(8):
(8)
式中:l清渡為清客車站與渡線的距離;l故前為故障列車與前方車站的距離。
2.2.2 二次延誤
1)無二次延誤
對于雙列位的停車線和車輛段,當救援列車和故障列車進入后,正線即可恢復正常運營,不存在二次延誤的情況。如果救援列車需要恢復運營,可通過調整列車間隔,在合適的時候投入運營,對正線的影響較小,筆者忽略此影響。因此車輛段、貫通式雙列位停車線和盡頭式雙列位停車線不產生二次延誤。
2)貫通式單列位停車線
貫通式單列位停車線兩端與正線連通,救援列車正向和反向救援均可直接進入,僅區分推送救援和牽引救援。推送救援如圖8,救援列車在摘鉤換端之后返回正線,之后再次換端,恢復運營,二次延誤時間如式(9);牽引救援過程如圖8,救援列車無需換端,二次延誤較少。
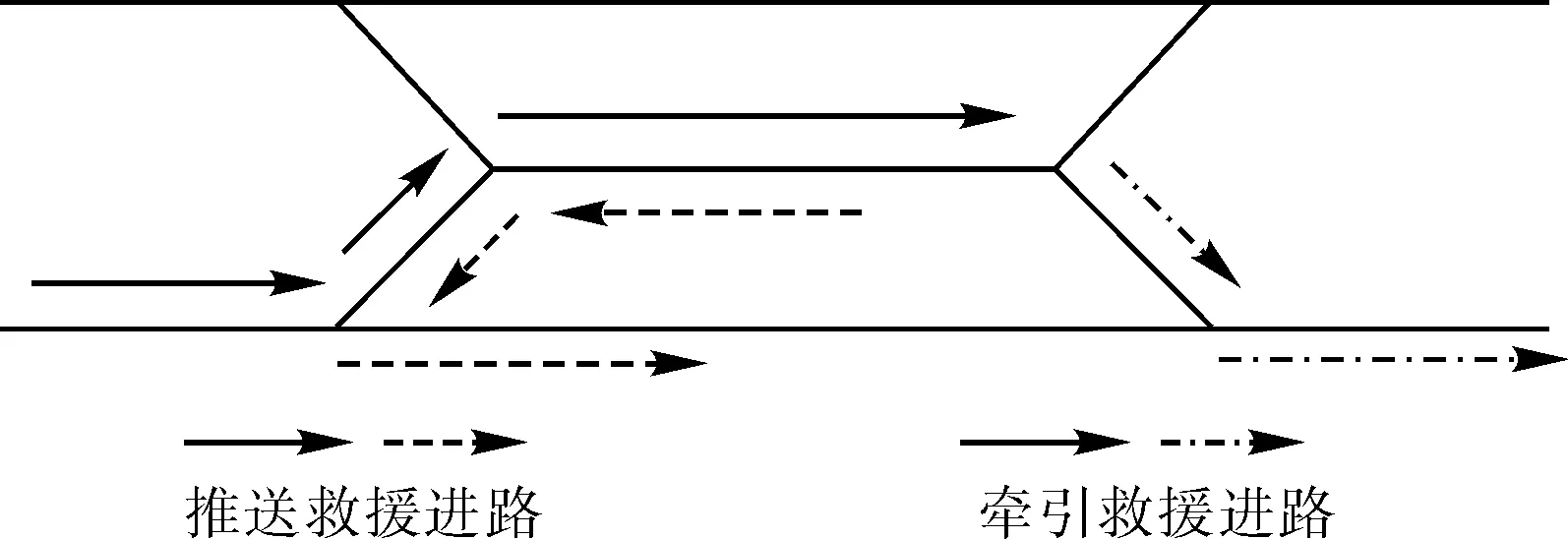
圖8 單列位停車線故障列車停放進路
(9)
3)盡頭式單列位停車線
向盡頭式單列位停車線推送救援,救援列車摘鉤后換端返回正線,再次換端恢復運營,此條件下無法進行牽引救援。二次延誤如式(10):
(10)
對于任意一個救援方案j,設其救援方案路徑選擇類型為kj,停放位置類型為lj,則其延誤計算如式(11):
Dj=T1,kj+T2,lj
(11)
3 救援延誤仿真分析
針對不同救援方式的延誤計算結果,筆者應用Open track軟件結合實際線路開展仿真驗證,分析計算延誤與仿真延誤的差異及產生原因。
以福州市某軌道交通線路部分區間為研究對象。線路區段起于A站,終于E站,總長8 268.7 m;共設站5座,平均站間距2 067 m,D-E區間站間距最大為3 088 m,B-C區間站間距最小為1 270 m;A-B區間站間旅行速度最大為82.3 km/h,B-C區間站間旅行速度最小為38.4 km/h。該區段故障車停放點為A站右側盡端式交叉渡線折返線和E站后的停車場,區段線路如圖9。各區間牽引救援和推送救援的速度如表2。

圖9 區間線路

表2 站間距與救援速度
仿真的救援情景為列車在車站B出現故障無法動車,需救援列車進行救援,救援過程涉及列車數量為5列,具體情況如表3。

表3 采用仿真列車說明
筆者研究計算延誤和仿真分析相關作業參數及取值如表4。
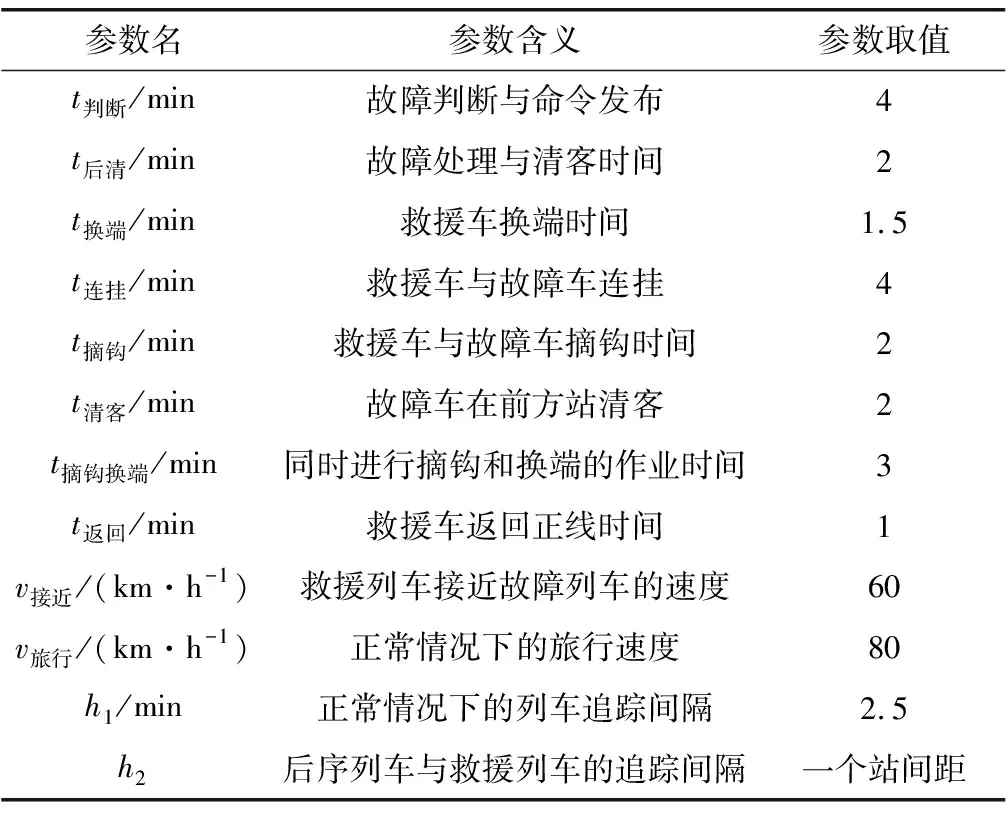
表4 列車故障救援仿真分析相關參數
延誤計算結果與仿真結果如表5,其中仿真結果為后序列車1在各站的平均延誤時間,二者相對誤差在0.66~9.80%范圍。后序列車對向救援的平均延誤統計對象為上行后序列車1,未對鄰線列車延誤進行統計,與理論計算存在差異較大,但后序列車對向救援影響范圍為本向和對向線路,其延誤情況可放大。綜上,筆者方法可較為準確地計算列車故障救援延誤。

表5 仿真結果與計算結果對比
從仿真結果可知,后序列車正向救援的平均延誤最大,前序列車和對向列車正向救援延誤最小。后序列車正向救援因以后序列車為救援車,救援車組以低速運行至停放點(切除ATP保護下,救援車組以固定閉塞運行時限速為25 km/h),產生較大延誤;前序列車和對向列車正向救援因采取牽引運行,救援車組以較高速度(限速為40 km/h)運行至停放點,產生延誤較小。此外,對同一故障點B分別采用5種救援方式進行仿真,救援列車的后序列車在各站延誤的統計結果如圖10。由圖10可知,因救援起訖點存在救援作業,上行后序列車1在救援起點B站和終點E站前均會產生延誤突增;且因運行速度低,后序列車正向和反向救援使列車在終點E站前延誤累積過多,突增幅度較大。
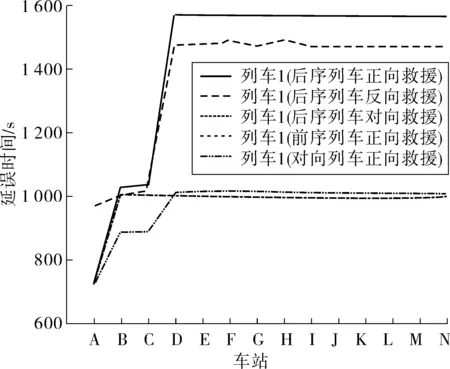
圖10 后序列車各站延誤
4 結 語
筆者對城市軌道交通列車故障救援作業流程和救援方式所造成的延誤進行分析和計算,并對救援作業中常用的后序列車正向推送救援的適用情況進行了分析,結論如下:
1)隨著救援列車到達故障點速度的增加,救援列車作業時間先迅速減小后趨于平緩,說明在一定范圍內提高救援速度可以有效減小救援列車作業時間。
2)各救援方式的延誤情況分析與計算進行的仿真驗證表明筆者所提出的計算方法相對誤差在0.66%~9.80%,可較為準確地反映延誤情況。
3)在救援起訖點范圍內,以固定閉塞運行的后序列車會出現延誤突增,且因延誤累積,造成延誤增幅差異。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
汽車維修與保養(2019年7期)2020-01-06 03:30:42
故事大王(2016年7期)2016-09-22 17:30:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39