智能除塵機器人系統的設計
2021-05-19 06:09:31黃俊曹文成江雨
科技資訊 2021年4期
關鍵詞:智能化
黃俊 曹文成 江雨
摘 ?要:傳統吸塵器工作時需要人的參與,且操作不便。該文研發智能除塵機器人是基于單片機物聯網平臺之下所應用的,在借助于STM32單片機程序設計、語音識別、軌跡規劃算法和WiFi遠程控制,將移動機器人技術和吸塵器技術有機地融合起來, 結構靈巧, 實現了室內環境的自主清潔。該文研發的是一種環保、健康、智能型的服務機器人,具有廣闊的應用前景和市場需求。
關鍵詞:STM32單片機 ?除塵機器人 ?軌跡規劃算法 ?智能化
中圖分類號:TP242.6 ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ?文章編號:1672-3791(2021)02(a)-0025-04
Design of Intelligent Dust Removal Robot System
HUANG Jun ?CAO Wencheng ?JIANG Yu
( School of Mechanical Engineering, Changshu Institute of Technology, Suzhou, Jiangsu Province, 215500 China)
Abstract: Traditional vacuum cleaners need people to participate in their work and are inconvenient to operate. The intelligent dust removal robot developed in this paper is applied under the platform of single chip microcomputer Internet of Things. With the help of STM32 single chip microcomputer programming, speech recognition, path planning and WiFi remote control, the mobile robot technology and dust collector technology are organically integrated, and the structure is smart, thus realizing the autonomous cleaning of indoor environment. The research and development of this paper is an environment-friendly, healthy and intelligent service robot, which has broad application prospects and market demand.
Key Words: STM32 single chip microcomputer; Dust removal robot; Trajectory planning algorithm; Intelligent
近年來,人口老齡化現象的不斷加劇,家居的智能性一次又一次地被提起,智能家居行業正在蓬勃發展,其中人們對于智能除塵機器人的需求也在不斷增加。然而現在市面上的智能除塵機器人價格普遍較高,并不是很適合在極大范圍內進行推廣。該文設計的除塵機器人以STM32F103單片機為控制中心,這樣一來可以最大限度地保留了它智能性的同時,也降低了生產成本,更加有利于市場推廣。
1 ?除塵機器人設計介紹
1.1 除塵機器人總體設計
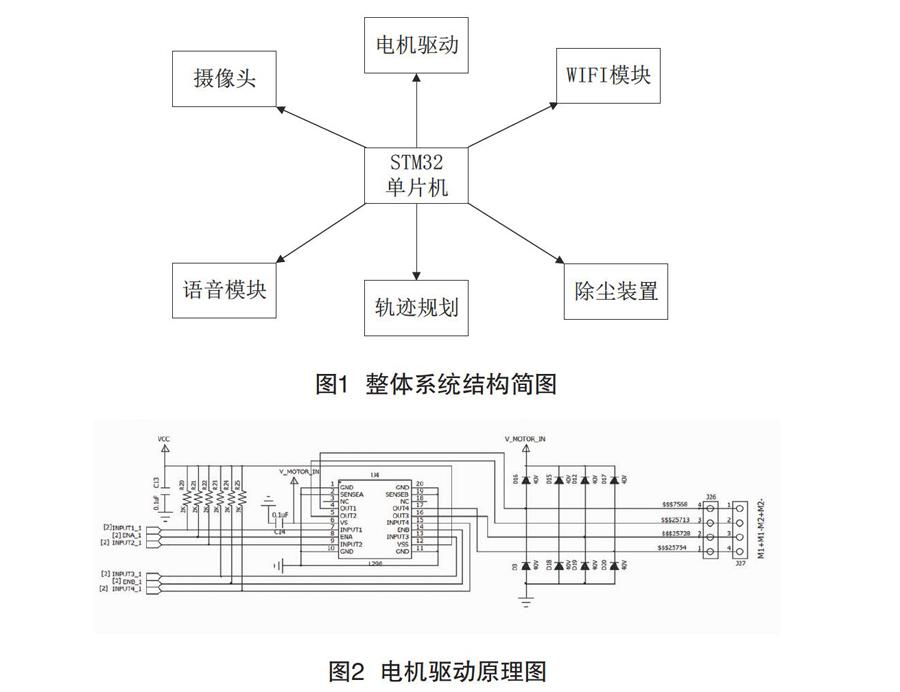
該文主要內容包括系統方案的選擇、硬件電路圖的設計與搭建、STM32單片機控制程序的編寫等內容。該課題以STM32單片機為控制中心,運用了多種搭載超聲波、紅外線、吸塵、WiFi、語音等模塊,加上軌跡規劃等算法,實現除塵機器人的智能操控,方便人們的日常生活。整體系統結構簡圖具體見圖1。
1.2 機械結構
在所有的機器人本體中能夠良好地實現各個功能模塊的通常為車體型。車體型的優點有速度快且靈活,控制操作簡單。一般車體型的運動方式主要是有步行式和輪式履帶式,輪式能夠穩定快速地移動,能量效率高,結構簡單控制簡單,根據該文設計內容采用輪式比較合理,履帶雖然結構十分穩定,承載能力大,但是速度慢。所以該文采用四輪式車體型在四輪的結構穩定性好,承載力大的特點基礎上速度也十分快。該設計采用四輪的結構,并且采用了4個驅動輪,能夠靈活地實現左轉右轉,做到穩定移動,車頭放置紅外感應器和超聲波模塊能流暢地避開障礙物。整體車長20cm、寬15cm,很好地契合了現代小型除塵機器人的便攜以及輕巧性。將STM32單片機、電機驅動模塊和WiFi模塊放置于車身后半部分,將裝置焊置車前底部能夠很好地穩定車體型結構。
2 ?硬件選型
2.1 電機驅動模塊
電機有直流電機和步進電機兩種型號的機體,直流電機通常采用的是連續的移動模擬的控制方式,直流電機以電壓為控制變量,以位置或者速度作為命令變量,直流電機需要反饋系統,以間接的方式控制電機。直流電機雖然結構較為復雜但是在速度和性能方面優良,調速方便且平滑范圍大,該系統采用的是直流電動機額定電壓為12V。電機驅動原理圖如圖2所示。
2.2 STM32F103單片機
該文的除塵機器人采用的是SYM32單片機中常用的STM32F103型號,它是屬于用途非常廣的32位ARM微控制器,集成了非常豐富的接口,通信模塊,功能齊全,實時性比較強。它的類型實際上是一種集成電路,它的程序存儲容量是64 kB且使用超大規模集成電路技術,把中央處理器、37個I/O接口、隨機存儲器、7個定時器、中斷系統以及計數器等部件組成,組成了適用于各個場合、各種裝置器件、各個場合、各類裝置器件的多功能控制系統。STM32電路原理圖具體見圖3。
2.3 紅外避障模塊
紅外避障模塊具有一對紅外線發射與接收管,對環境光線適應能力強,發射管發射出一定頻率的紅外線,當檢測信號檢測到發射面方向遇到障礙物時,紅外線反射回來被接收管接收,經過比較器電路接收之后,指示燈會亮起,同時信號輸出接口開始輸出數字信號。傳感器的有效距離范圍為2~30 cm,工作電壓為3.3~5V。該傳感器具有干擾小、探測距離可調節、便于裝配、使用方便等特點,可以廣泛應用于機器人避障、避障小車、流水線計數和黑白線循跡等眾多場合。
2.4 語音模塊
語音識別模塊可以更加方便使用者的操作,且靈活多樣。但在開始階段語音識別模塊是無法有效識別出內容來進行工作的,而是需要進行訓練,收集大量的語音資料,進行數據采集和分析后,建立特定的語音識別參考模型,當人說出話語時,與庫中的語音進行相似度比較,然后把相似度最高的語音作為識別的結果,最后進行輸出控制。語音模塊實物圖如圖4所示。
2.5 WiFi模塊
該文采用的ESP8266是一款超低功耗的UART-WiFi透傳模塊,設備發起連接后,上位機能夠十分迅速地進行WiFi信號識別,接收反饋信號。能夠廣泛用于物聯網、家居設備,智能電信十分適用于該研究的除塵機器人。圖5為WiFi模塊電路原理圖,圖6為WiFi模塊實物圖。
3 ?除塵機器人整體工作流程
打開開關后,攝像頭模塊進行環境數據采集,找到灰塵后采用軌跡規劃算法進行最優行動軌跡,隨后通過WiFi模塊上傳至上位機。用戶通過手機APP可以點擊開始除塵。在路程中使用紅外避障和循跡模塊來躲避障礙物。此外,也可以通過語音識別模塊遠程開關除塵機器人進行除塵工作。除塵機器人總體工作流程圖如圖7所示。
4 ?軌跡規劃算法
由于傳統的Dijkstra算法雖然可以規劃出更優的路線,但是由于耗時較長,不適用于該文的除塵機器人。該文采的A*算法是一種標準的靜態全局軌跡尋優算法,能夠極大地減少計算時間,提高行動效率。A*算法是計算所有通過環境地圖中初始位置到目標位置的路線,在進行對比、選擇出最優的行動方向,直到搜尋到目標位置,最后回到初始位置然后形成全局的最優軌跡的一種算法,其函數可以表示為:
f(n)=g(n)+h(n) ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
式中,f(n)是初始節點到目標節點的估計函數;g(n)為n到目標的最短軌跡的啟發值;h(n)為從當前節點n 到目標節點軌跡最優的代價估計。若啟發式函數h(n)為 0時,估價函數則完全由實際代價函數g(n)來決定。相反,若不考慮實際代價,即當g(n)為0時,估計代價決定整個規劃軌跡代價,此時類似于深度優先搜索算法。該文采用此算法能夠更快捷、更方便地搭建除塵車對環境出發點和目標點軌跡選擇,更加合理地完成除塵工作。A*算法流程圖如流程圖8所示。
5 ?結語
該文大量研究了市面上現有的除塵機器人,仔細閱讀分析了相關的參數和設計原理,分析了彼此之間的優缺點,從中得出一些對我們有利的啟示。該文詳細地給出了基于STM32除塵機器人系統的硬件設計和軟件設計,所設計的除塵機器人系統具有智能化、人性化等優點,具有廣泛推廣的應用價值。
參考文獻
[1] 劉力瑋,馬振興,張志輝,等.一種基于SLAM算法的移動機器人[J].科學技術創新,2020(27):89-90.
[2] 孫煒,呂云峰,唐宏偉,等.基于一種改進A*算法的移動機器人軌跡規劃[J].湖南大學學報:自然科學版,2017,44(4):94-101.
[3] 李娜娜,張冬琴,孫淼,等.面向公共場所的智能存取裝置[J].電腦知識與技術,2020,16(3):252-254.
[4] 程傳奇,郝向陽,李建勝,等.融合改進A*算法和動態窗口法的全局動態軌跡規劃[J].西安交通大學學報,2017,51(11):137-143.
[5] 周臺新,牟令,馬興超.嵌入式清潔機器人系統設計[J].中外企業家,2018(7):96-97.
[6] 鐘智杰,楊昊旋,崔鵬,等.基于STM32的智能四輪全向移動可重構避障機器人[J].傳感器與微系統,2020,39(9):112-115,118.
[7] 于波,王慧.基于STM32單片機的智能消防小車系統[J].工業儀表與自動化裝置,2020(4):117-121.
[8] 張志威.基于STM32嵌入式系統的電機驅動控制與可靠性分析[D].電子科技大學,2017.
[9] 徐道鴻.基于STM32的服務機器人硬件平臺的設計與實現[D].東南大學,2017.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25
