解線性方程組的VRP-GMRES(m)迭代法
2021-05-13 05:52:48白雪婷楊琴樂
通化師范學院學報 2021年4期
白雪婷,楊琴樂
應用科學、物理和工程領域許多問題可建立偏微分方程的數學模型,這些微分方程經過離散后一般都可歸結為求解大型稀疏線性方程組Au=b,A∈Rn×n,u,b∈Rn,其中A為非奇異矩陣.這類方程組的求解通常采用迭代法.目前,以Galerkin 原理為基礎建立的廣義極小殘余GMRES(m)迭代法是求解此類方程組最有效的方法之一.因此,近年來GMRES(m)算法及其在其他領域的應用一直是人們研究的熱點[1-4].實際計算表明,當系數矩陣A是良態矩陣時,GMRES(m)算法及一些簡單改進后的GMRES(m)算法便可有效地求解這些線性系統[5-6],但如果系數矩陣A具有很強的病態性,則必須結合一些特定的預處理技術[7-10].
不管是GMRES(m)算法還是預處理GMRES(m)算法,在實際執行這些算法時,參數m一旦選定,在之后整個迭代過程當中將始終固定不變.所以參數m的選擇也是影響算法有效執行的關鍵因素之一.研究表明,m取值較小時,有可能出現收斂慢甚至不收斂等現象,m選擇過大會造成存儲空間過多的需求.因此,如何選擇一個合適的參數m一直困擾著眾多學者,最近有不少學者試圖通過變化GMRES(m)算法中的重啟動參數m來克服這些困難.BAKE A H 最初通過選擇隨機的參數m來改善GMRES(m)算法的收斂性,后來又根據兩次迭代所得殘余向量的范數之比來確定參數m的大小,但這也并不能保證算法的收斂性[11-12],PEAIRS L 等則通過強化學習方法來決定參數m的取值,該方法進一步表明適當的參數m可以提高GMRES(m)算法的計算效率,但由于強化學習只是一種機器學習方法,因此存在一定局限性[13].
1 GMRES(m)算法基本理論
1.1 Galerkin 原理
任意給定向量u0∈Rn,令u=u0+z,則方程組Au=b等價于

其中:r0=b-Au0是初始殘余向量.給定一個參數m>0,設Rn中兩個m維子空間Km和Lm分別為:

且v1,v2,…,vm和w1,w2,…,wm分別為子空間Km和Lm的基.令求解式(1)的Galerkin 原理為:給定一個m>0,尋找近似解zm=Vmym∈Km,使(r0-Azm)⊥Lm,即(r0-AVmym)⊥Lm,該 式 也 可 表 示 為(r0-AVmym,ωi)= 0,ym∈Rm.
1.2 Arnoldi 過程及其性質
Arnoldi 過程具體如下(文中若不作特殊說明,‖ · ‖均表示向量的二范數):
①對m>0 和初始向量v0∈Rn.計算v1=r0‖r0‖,其中r0=b-Au0;
②對于k= 1,2,…,m,計算hi,k= (Avk,vi),要 求
③如果hk+1,k= 0,停止;否則vk+1=
Arnoldi 過程有如下重要性質.
定 理1[14]在Arnoldi 過 程 中,令Vm+1=則如下關系成立.

其中:Hm= (hij)m是上海森伯格矩陣,=(0,0,…,1) ∈Rm且I是一個m+ 1 階單位矩陣.
1.3 GMRES 算法
定理2[15]令A為n×n方陣并假定L=AK,u=u0+z=u0+Vmy,則由Galerkin 原理得到的近似解Zm將使殘余向量‖r0-Az‖在Krylov子空間Km中達到最小,反之亦然,并且有

其中:β= ‖r0‖,e1= ( 1,0,…,0)T∈ Rm+1.‖r0-Az‖2等價于在Rm中極小化
這個定理表明,在Km中極小化殘余向量GMRES(m)算法基本思想就是固定重啟動參數m,通過求解最小二乘問題迭代計算求得zm,使得‖rm‖= ‖r0-Azm‖<τ,GMRES(m)算法詳細步驟如下:
①給定誤差上界τ>0,給定一個合適的m(m<n),取u0∈Rn,計 算r0=b-Au0以及β= ‖r0‖;
④計 算zm=Vmym.若‖rm‖= ‖r0-Azm‖<τ,迭代終止;否則,令um=u0+zm,u0=um,轉向步驟②.
在GMRES(m)算法中,并非任意選取m都能使其收斂.事實上,適當地變化m可以有效地改善GMRES(m)的收斂性,且在一定程度上可以避免收斂慢甚至不收斂等現象.
2 VRP-GMRES(m)算法
2.1 VRP-GMRES(m)算法
適當變化重啟動參數m,通過迭代使得殘余向量‖rm‖= ‖r0-Azm‖<τ,具體過程為:
Step1:選擇一個較小的初始正整數m(m?n),給定誤差上界τ>0;
Step3:求解如下最小二乘問題

可得ym,計算近似解zm=Vmym,且令um=u0+zm;
Step4:如 果‖rm‖= ‖r0-Azm‖<τ,迭 代停止,輸出u=um.否則,轉向Step5;
Step5:令u0=um,m=m+ 1(m≤n)轉至Step2.
實際執行VRP-GMRES(m)算法時,可能出現收斂慢甚至不收斂等現象(雖然這種情況較少發生).所以,為防止參數m過大而造成存儲空間過多的需求,可以先執行若干次VRP-GMRES(m)算法,待m增加到一定程度且殘量范數減小到某一適當值時,再固定m循環迭代,即執行GMRES(m)算法.
2.2 收斂分析
定義1[15]設

其中:實數c和s滿足,稱Gi為平面旋轉矩陣,也稱為Givens(吉文斯)變換矩陣.
定 理3 在VRP-GMRES(m)算 法 中,令
證明 在VRP-GMRES(m)算法中,令式(5)中Gi∈R(m+1)×(m+1),

其中:i= 1,2,…,m,經i-1 次Givens 正交變換后對角線及次對角線元素.
令Qm=GmGm-1…G1,對 式(4)中和βe1作正交變換,則可得

其中:Rm是m階可逆上三角方陣.

解Rmy=gm,得ym.此時

當參數m變為m+ 1 時,由Arnoldi 過 程,有
令式(5)中Gi∈R(m+2)×(m+2),且

其中:i= 1,2,…,m+ 1,取Qm+1=Gm+1Gm…G1,對式(4)中和βe1作正交變換,則

其中:Rm+1是m+ 1 階可逆上三角方陣,

其中:e1= ( 1,0,…,0)T∈ Rm+2,gm+1∈ Rm+1.
于是

解Rm+1y=gm+1,得ym+1.此時

由定理3 知,VRP-GMRES(m)算法不僅收斂,而且比GMRES(m)算法計算精度更高.
3 數值實驗
本節通過兩個不同類型的數值算例說明VRP-GMRES(m)算法的有效性和可行性,分析比較GMRES(m)和VRP-GMRES(m)兩種算法的數值結果.在以下算例中均選取u0=作 為 初 始 向 量,‖rm‖=‖r0-Azm‖<τ= 1e- 8 作為停止迭代標準.算例1 考慮如下一維波動方程

該方程精確解為:u(x,t)= sin( πx)cos( 2πt)+ sin( 2πx)cos( 4πt),其中:u(x,t)表示振弦,是對特定位置x和特定時間t的波強度的一個測量,如圖1(a)所示.用中心差分格式離散后可得

其中:n表示x方向和t方向網格數.用VRPGMRES(m)算法求解式(8),計算結果如圖1(b)所示.由圖1 知,式(7)的數值解和精確解是一致的,這也說明VRP-GMRES(m)算法的正確性.
分別用GMRES(m)算法和VRP-GMRES(m)算法求解式(8),當n= 10,m= 7時,cond(A)=56.507 9.GMRES(m)算法循環迭代9 次后出現迭代停滯,此時殘量范數為1.409 9,但對于VRP-GMRES(m)算法,迭代3 次后殘量范數已達到1.423 0e-014.迭代過程各節點絕對誤差大小的比較如圖2 所示.

圖2 迭代過程中各節點絕對誤差大小的比較
由圖2 可知,當迭代次數相同時,用VRPGMRES(m)算法比用GMRES(m)算法得到的計算結果的絕對誤差要小得多,而且隨著迭代次數的增加,用VRP-GMRES(m)算法計算產生的絕對誤差減少得更快.這說明本文算法不僅具有更高的計算精度,而且能快速收斂.
當參數m分別取不同值時,對兩種算法的計算結果進行比較如表1~表4 所示.表1~表4 分別給出兩種算法的迭代次數、運行時間、計算精度和收斂速度比較.從表1~表4 可知,文中提出的算法收斂快,穩定性好,計算精度高,運行時間短.參數m的選擇對GMRES(m)算法至關重要,參數m選擇不當會導致算法失敗,而參數m的選擇對VRP-GMRES(m)算法的執行基本無任何影響.這表明,GMRES(m)算法對參數m的選擇相當敏感,m的微小變化可能會導致GMRES(m)算法出現迭代停滯等現象,而本文提出的VRP-GMRES(m)算法中參數m是變化的,在一定程度上降低了GMRES(m)算法對參數m的敏感度,這也是VRP-GMRES(m)算法的優點之一.

表1 兩種算法迭代次數比較

表2 兩種算法運行時間比較

表3 兩種算法計算精度比較

表4 兩種算法收斂性比較
事實上,當網格數n增大時,系數矩陣A的條件數也不斷增大,當n=59時,A的條件數已達到2.109 8e+003,方程組(8)呈現嚴重的病態性.由表1 知,此時即使參數m取值很大,GMRES(m)算法的收斂速度也不是很快,而且在達到給定誤差時,GMRES(m)算法的迭代次數是VRP-GMRES(m)算法的11.7 倍,運行時間是其10.7 倍.這表明,隨著計算規模地增大,VRP-GMRES(m)算法比GMRES(m)算法更有效,有更廣闊的前景.
算例2 考慮如下二維泊松方程

該方程精確解為u(x,y)=x2(x+y2)+ 2,其中:u(x,y)是溫度分布函數,溫度分布如圖3(a)所示.將式(9)所示的求解區域分別沿x方向和y方向n等分,可得

取n=40,m=10,用VRP-GMRES(m)求解式(10)時,各節點處的溫度分布如圖3(b)所示.由圖3 可知,數值解和精確解是一致的.

圖3 溫度分布(n=40,m=10)
當m=10 時,隨著計算規模不斷增大,VRP-GMRES(m)算法所需迭代次數變化較小且所需的迭代次數要比GMRES(m)少很多,如圖4(a)所示,說明VRP-GMRES(m)算法有更高的計算效率,同時,VRP-GMRES(m)算法還有更高的精度,如圖4(b)所示.另外,實際執行VRP-GMRES(m)算法時,雖然每次迭代所耗時可能比GMRES(m)算法長,但是由于VRP-GMRES(m)算法收斂速度很快,所以當殘量范數達到給定誤差時,如表5 所示,本文提出的VRP-GMRES(m)算法總的運行時間要比GMRES(m)算法少很多.
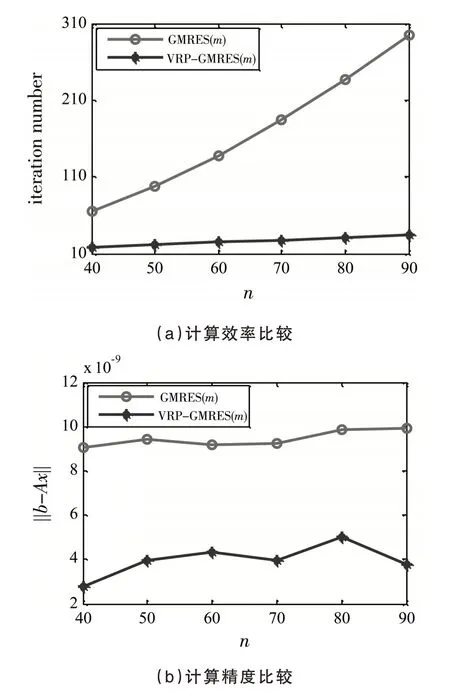
圖4 不同網格下兩種算法計算效率和計算精度比較(m=10)

表5 不同網格下兩種算法運行時間比較
4 結語
文中提出一種求解線性方程組的VRPGMRES(m)算法,理論證明新算法收斂且計算精度更高.數值試驗結果表明本文提出的VRP-GMRES(m)算法不僅有更高的計算效率和計算精度,而且有更好的穩定性.新算法適合用來求解由科學研究和工程問題得到的大型線性方程組.