番茄枝葉裁剪機(jī)械臂設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析*
2021-05-11 13:37:52楊銘濤梁喜鳳
中國(guó)農(nóng)機(jī)化學(xué)報(bào) 2021年4期
關(guān)鍵詞:機(jī)械
楊銘濤,梁喜鳳
(中國(guó)計(jì)量大學(xué)機(jī)電工程學(xué)院,杭州市,310018)
通訊作者:梁喜鳳,女,1976年生,內(nèi)蒙古赤峰人,博士,教授,碩導(dǎo);研究方向?yàn)檗r(nóng)業(yè)機(jī)器人。E-mail: lxfcjlu@163.com
0 引言
中國(guó)是世界上番茄培栽面積最大、生產(chǎn)總量最多的國(guó)家之一[1]。以無(wú)架的形式種植番茄,其種植面積小,植株長(zhǎng)勢(shì)沒(méi)有規(guī)律,移動(dòng)番茄的枝干容易造成枝干的折斷,并且產(chǎn)量很低;而大面積的番茄種植是在溫室大棚中以高架的形式進(jìn)行種植的,這種種植方式的優(yōu)點(diǎn)是可種植番茄的品種多,產(chǎn)量高,能夠充分提高陽(yáng)光的利用率,灌溉、施肥以及植保也非常方便,植株之間的行距比較寬闊,無(wú)論是采摘果實(shí)還是修剪枝葉,都適合機(jī)械化作業(yè)。番茄的枝葉裁剪是一項(xiàng)繁重的工作。番茄植株一般長(zhǎng)到13片葉子的時(shí)候,會(huì)分出兩個(gè)主要的枝干,此時(shí)就需要將多余的側(cè)枝剪掉,以保證主枝有足夠的營(yíng)養(yǎng)供應(yīng)[2-4]。另外大棚番茄每結(jié)一穗果之后,需要將番茄果實(shí)下部的病葉殘葉剪掉,為下一穗果的生長(zhǎng)提供空間、節(jié)約養(yǎng)分。目前番茄枝葉的修剪主要還是依靠人工割斷或是直接掰斷,這樣不僅人工成本高,而且還容易損傷番茄植株[5-6]。
自1983年第一臺(tái)番茄采摘機(jī)器人在美國(guó)誕生以來(lái),日本與歐美等發(fā)達(dá)國(guó)家不斷研究開(kāi)發(fā)各類(lèi)采摘機(jī)器人[7-8]。日本KNODO等人研制的西紅柿采摘機(jī)器人,采用三菱的RH-6SH5520型四個(gè)自由度的工業(yè)機(jī)器人。而我國(guó)在進(jìn)入21世紀(jì)后也開(kāi)始加大采摘機(jī)器人的研究力度[9]。但是,由于農(nóng)業(yè)采摘機(jī)器人的作業(yè)環(huán)境特殊、作業(yè)對(duì)象復(fù)雜,對(duì)機(jī)械臂的結(jié)構(gòu)要求很高,迄今為止采摘機(jī)器人的發(fā)展仍停留在實(shí)驗(yàn)室階段[10-11]。在各類(lèi)果蔬中,番茄是機(jī)器人作業(yè)難度最大的果蔬種類(lèi)之一[12-13]。
目前,多自由度的機(jī)械臂運(yùn)動(dòng)學(xué)表達(dá)方式主要有D-H方法、四元數(shù)方法、指數(shù)積方法。其中D-H方法概念清晰,能夠比較直觀(guān)地推導(dǎo)出機(jī)械臂的運(yùn)動(dòng)學(xué)模型,在使用過(guò)程中具有一定優(yōu)勢(shì)[14]。Paul修正后的D-H 矩陣法,被越來(lái)越多的學(xué)者用于求解機(jī)械臂運(yùn)動(dòng)學(xué)的問(wèn)題,并作為一種通用方法沿用至今[15]。故本文也采用D-H方法,建立機(jī)械臂的運(yùn)動(dòng)學(xué)模型[16-18]。運(yùn)動(dòng)學(xué)仿真主要是機(jī)械臂的動(dòng)態(tài)仿真,目前常用的仿真方法是在Adams環(huán)境下進(jìn)行仿真,若單純使用Adams進(jìn)行運(yùn)動(dòng)學(xué)仿真,需要重新進(jìn)行建模,再添加相應(yīng)的參數(shù)[18-22]。也有部分學(xué)者使用MATLAB Robotics Toolbox工具箱直接進(jìn)行運(yùn)動(dòng)學(xué)仿真,該方法需要工具箱中的零件重新進(jìn)行建模,仿真的準(zhǔn)確性稍差[22-24]。故本文采用Solidworks和Adams聯(lián)合進(jìn)行運(yùn)動(dòng)學(xué)仿真,既保留了機(jī)械臂的原始模型,又避免了繁瑣的仿真環(huán)境搭建,大大縮短了運(yùn)動(dòng)學(xué)仿真周期。當(dāng)研究機(jī)械臂用于作業(yè)時(shí),需考慮一個(gè)重要的因素,即機(jī)械臂在運(yùn)動(dòng)過(guò)程中,能達(dá)到的空間位置,這對(duì)于作業(yè)和避障都有一定的實(shí)際意義。因此機(jī)械臂在設(shè)計(jì)階段,應(yīng)對(duì)機(jī)械臂的工作空間進(jìn)行分析。針對(duì)該問(wèn)題,本文通過(guò)采用蒙特卡洛法分析該機(jī)械臂的工作空間,并對(duì)機(jī)械臂的工作域進(jìn)行求解,給出了機(jī)械臂末端的工作空間點(diǎn)云圖。
1 機(jī)械臂結(jié)構(gòu)設(shè)計(jì)
1.1 剪裁對(duì)象
本文針對(duì)的剪裁對(duì)象為番茄的枝葉,包括番茄的莖和葉。番茄植株株高0.6~2 m,全體生粘質(zhì)腺毛,莖易倒伏,其葉子呈羽狀復(fù)葉,或羽狀深裂,長(zhǎng)10~40 cm,小葉極不規(guī)則,大小不等,大部分情況下有5~9枚,卵形或矩圓形,長(zhǎng)5~7 cm,邊緣有不規(guī)則鋸齒或裂片。由于番茄的莖為半直立型,且具頂端優(yōu)勢(shì),即需要修剪的側(cè)枝生長(zhǎng)范圍是在整個(gè)番茄植株上,故該機(jī)械臂的工作空間高度范圍為番茄植株的株高,即在0.6~1.8 m內(nèi),且由于番茄植株的生長(zhǎng)特性,要求機(jī)械臂在裁剪目標(biāo)枝葉時(shí),不損壞其他非目標(biāo)枝葉。
1.2 機(jī)械臂整體結(jié)構(gòu)
機(jī)械臂是摘葉機(jī)器人的重要執(zhí)行部件,其主要功能是為實(shí)現(xiàn)摘葉末端執(zhí)行器的定位,考慮到機(jī)械臂要實(shí)現(xiàn)多角度大空間的工作范圍,故根據(jù)番茄枝葉的生長(zhǎng)特性,設(shè)計(jì)了一種由三個(gè)轉(zhuǎn)動(dòng)關(guān)節(jié),兩個(gè)移動(dòng)關(guān)節(jié)組成的五自由度機(jī)械臂,兩個(gè)移動(dòng)關(guān)節(jié)通過(guò)兩級(jí)伸縮桿實(shí)現(xiàn),機(jī)械臂的具體結(jié)構(gòu)圖如圖1所示。
機(jī)械臂的主箱體為450 mm×390 mm×200 mm的長(zhǎng)方體箱體,內(nèi)部安裝蝸輪蝸桿結(jié)構(gòu),其中一個(gè)側(cè)面固定安裝主電機(jī),通過(guò)主傳動(dòng)軸連接上方的第二關(guān)節(jié)、第三關(guān)節(jié)。其中伸縮桿外殼的主體為500 mm×80 mm×80 mm的長(zhǎng)方體外殼,內(nèi)部安裝有氣動(dòng)伸縮桿外殼,其主體為450 mm×50 mm×50 mm的長(zhǎng)方體外殼,其行程長(zhǎng)度為0~340 mm。氣動(dòng)伸縮桿外殼內(nèi)部固定安裝一個(gè)行程為0~370 mm的氣動(dòng)伸縮桿。
工作時(shí),主電機(jī)通過(guò)蝸輪蝸桿帶動(dòng)主傳動(dòng)軸轉(zhuǎn)動(dòng),以實(shí)現(xiàn)整個(gè)機(jī)械臂的旋轉(zhuǎn)運(yùn)動(dòng)。伸縮桿基座安裝在主傳動(dòng)軸上端,俯仰電機(jī)通過(guò)減速器帶動(dòng)伸縮桿外殼旋轉(zhuǎn),實(shí)現(xiàn)伸縮桿的俯仰運(yùn)動(dòng)伸縮桿外殼一側(cè)安裝小電機(jī),小電機(jī)通過(guò)齒輪齒條帶動(dòng)氣動(dòng)伸縮桿的伸縮。伸縮桿外殼的內(nèi)部一側(cè)安裝了滑軌,該滑軌的作用是將氣動(dòng)伸縮桿固定在伸縮桿桿外殼上,以保證氣動(dòng)伸縮桿的平穩(wěn)滑動(dòng)。實(shí)現(xiàn)機(jī)械臂的一級(jí)伸縮運(yùn)動(dòng)。氣動(dòng)伸縮桿則實(shí)現(xiàn)了機(jī)械臂的二級(jí)伸縮運(yùn)動(dòng)。
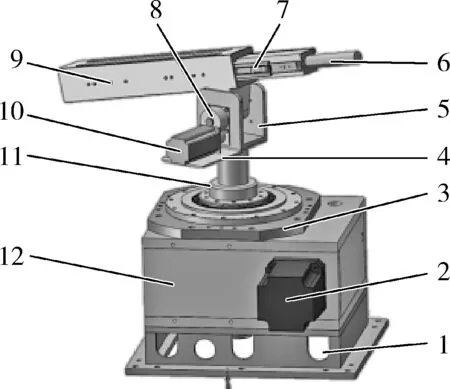
(a) 機(jī)械臂整體結(jié)構(gòu)側(cè)面圖
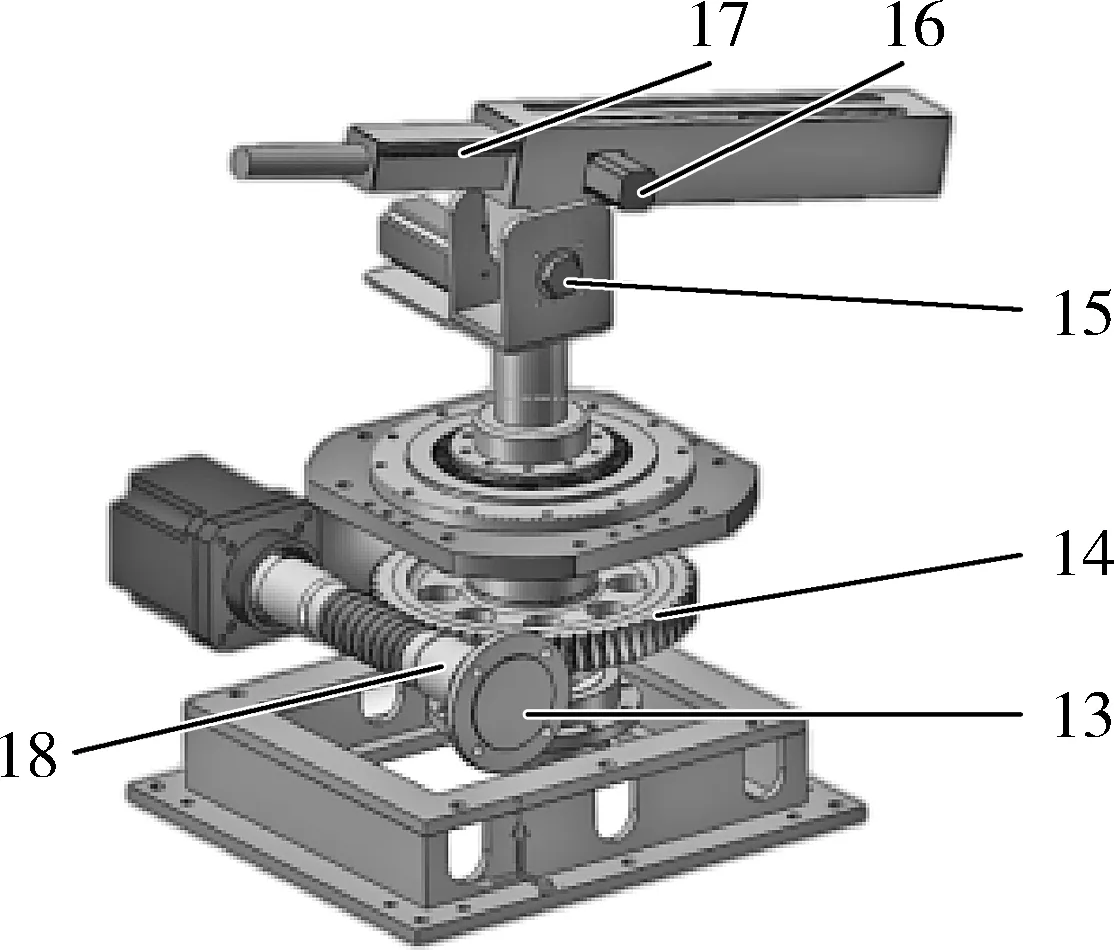
(b) 機(jī)械臂去箱體三維圖圖1 機(jī)械臂整體結(jié)構(gòu)Fig. 1 Overall structure of manipulator1.底座 2.主電機(jī) 3.固定盤(pán) 4.電機(jī)座 5.伸縮桿基座 6.氣動(dòng)伸縮桿 7.滑軌 8.減速器 9.伸縮桿外殼 10.俯仰電機(jī) 11.主傳動(dòng)軸 12.主箱體 13.蝸桿法蘭 14.渦輪 15.法蘭 16.小電機(jī) 17.齒輪齒條 18.蝸桿
2 機(jī)械臂的正運(yùn)動(dòng)學(xué)分析
2.1 D-H坐標(biāo)及參數(shù)
為了研究機(jī)械臂各關(guān)節(jié)的運(yùn)動(dòng)關(guān)系,本文采用標(biāo)準(zhǔn)D-H法對(duì)該機(jī)械臂進(jìn)行運(yùn)動(dòng)學(xué)建模,可得到的機(jī)械臂的連桿坐標(biāo)系如圖2,機(jī)械臂的D-H參數(shù)表如表1。
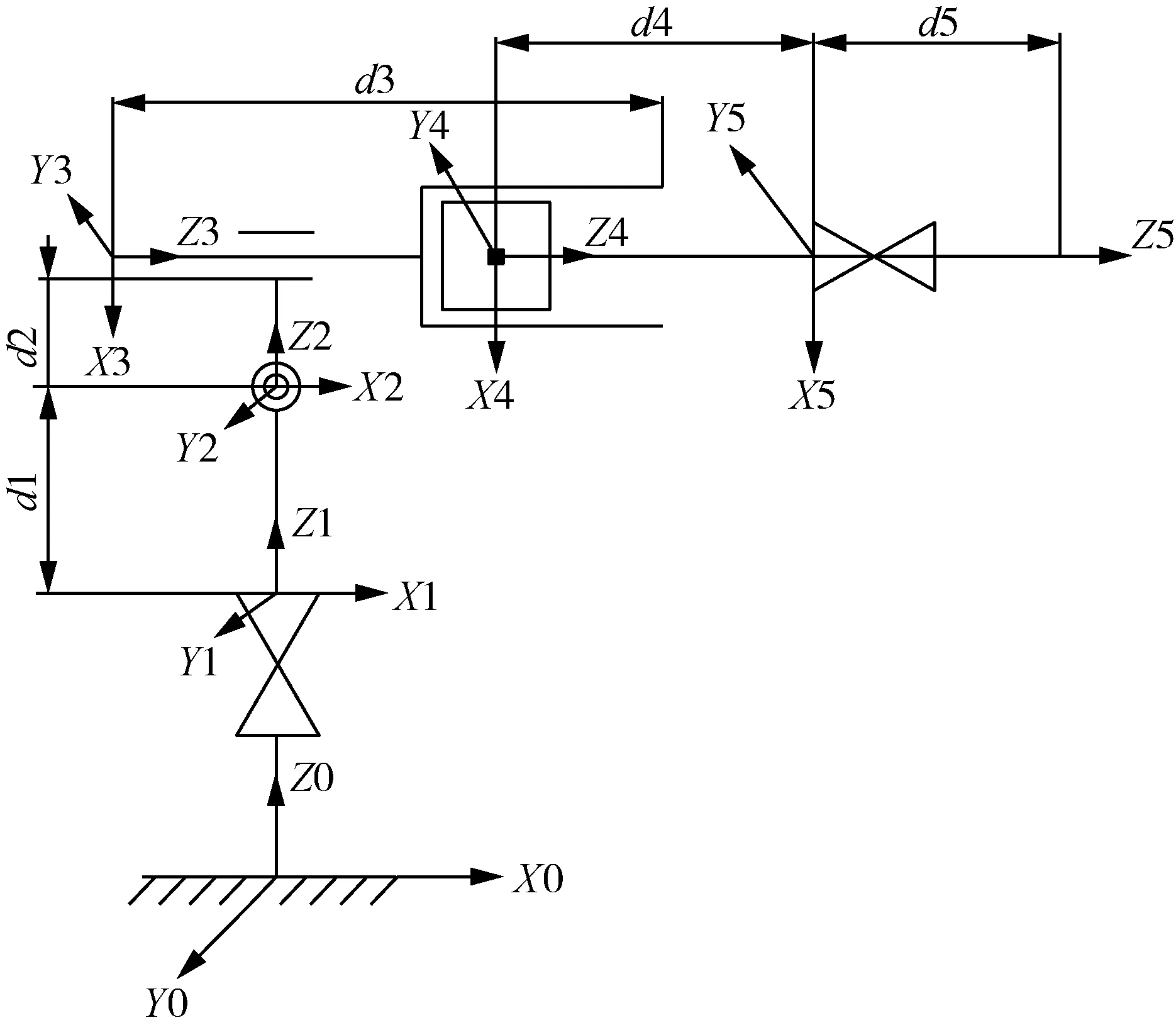
圖2 機(jī)械臂連桿坐標(biāo)系圖Fig. 2 Coordinate system of mechanical arm connecting rod
2.2 建立機(jī)械臂的DH參數(shù)
通過(guò)機(jī)械臂的模型,建立機(jī)械臂的D-H參數(shù)。
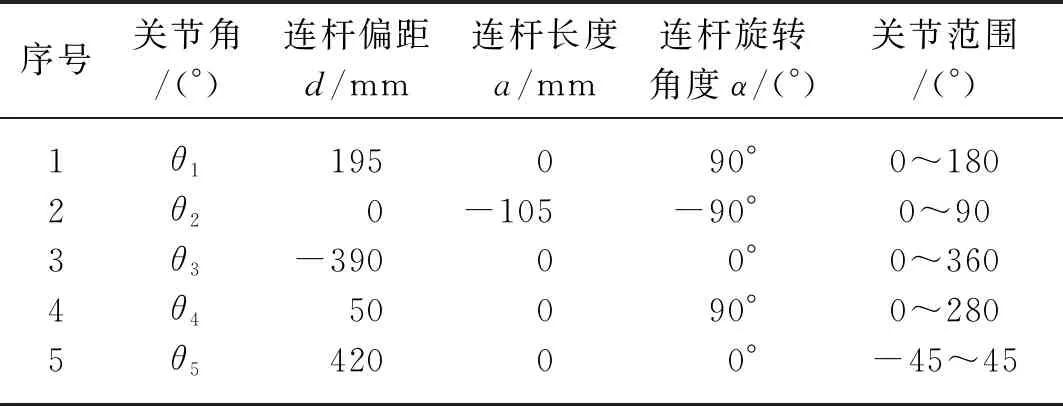
表1 機(jī)械臂的D-H參數(shù)Tab. 1 D-H parameters of manipulator
參數(shù)以各部件的總長(zhǎng)度為極限伸縮長(zhǎng)度,轉(zhuǎn)角為一周的轉(zhuǎn)動(dòng)。最后一個(gè)轉(zhuǎn)動(dòng)自由度對(duì)行程的蒙特卡洛工作空間沒(méi)有影響,故其取值范圍對(duì)工作空間沒(méi)有影響。其中θi(i=1,2,3,4,5)為關(guān)節(jié)變量。
2.3 建立機(jī)械臂的D-H正運(yùn)動(dòng)學(xué)方程
機(jī)械臂相鄰連桿間的變換矩陣
(1)
將兩關(guān)節(jié)間的變換矩陣依次相乘,可得到機(jī)械臂的運(yùn)動(dòng)學(xué)方程
0T5=0T11T22T33T44T5
(2)

其中:ci表示cosθi,si表示sinθi,cij表示cos(θi+θj),sij表示sin(θi+θj)。
3 機(jī)械臂的運(yùn)動(dòng)學(xué)仿真
3.1 機(jī)械臂的仿真試驗(yàn)與分析
采用Solidworks和Adams兩個(gè)軟件對(duì)機(jī)械臂的運(yùn)動(dòng)性能進(jìn)行仿真分析。通過(guò)Solidworks軟件進(jìn)行建模,將建模后的模型輸入到Adams軟件中,在該軟件的工作環(huán)境下進(jìn)行仿真試驗(yàn)。仿真流程圖如圖3所示。機(jī)械臂各關(guān)節(jié)運(yùn)動(dòng)表如表2所示。
在Adams中,對(duì)機(jī)械臂模型進(jìn)行“添加材料”“修改外觀(guān)”以及“添加運(yùn)動(dòng)副”的操作后,對(duì)模型進(jìn)行運(yùn)動(dòng)學(xué)仿真驗(yàn)證。根據(jù)機(jī)械臂的選型情況,在前述驅(qū)動(dòng)中分別增加適合的驅(qū)動(dòng)函數(shù)。

圖3 軌跡仿真流程圖Fig. 3 Flow chart of trajectory simulation
表2 機(jī)械臂各關(guān)節(jié)運(yùn)動(dòng)表Tab. 2 Motion Table of each joint of manipulator
設(shè)置運(yùn)行時(shí)間為5 s,按照設(shè)置的驅(qū)動(dòng)函數(shù),機(jī)械臂的運(yùn)動(dòng)軌跡圖如圖4所示,該軌跡包含了機(jī)械臂在裁剪番茄枝葉時(shí)的工作軌跡,以及機(jī)械臂的最大工作高度和最低工作高度。
如圖4所示的運(yùn)動(dòng)軌跡,左側(cè)的圓弧最低點(diǎn)為機(jī)械臂末端的所能到達(dá)的最低點(diǎn),經(jīng)過(guò)俯仰一個(gè)角度之后,到達(dá)軌跡的上端的圓形軌跡,最上端的圓形軌跡是機(jī)械臂的末端位于所能達(dá)到的最大高度時(shí),旋轉(zhuǎn)360°的軌跡。整個(gè)軌跡是從機(jī)械臂的伸縮桿最緊縮的狀態(tài)到最大極限位置,最終再回到初始位置。
圖4 機(jī)械臂運(yùn)行軌跡圖Fig. 4 Trajectory of manipulator
3.2 運(yùn)動(dòng)學(xué)仿真結(jié)果
在Adams的工作環(huán)境中,設(shè)置機(jī)械臂模型的剛度為10E+05 N/mm,設(shè)置力指數(shù)為2.2,設(shè)置摩擦阻尼10.0 (N·s)/mm。將3個(gè)轉(zhuǎn)動(dòng)副和2個(gè)移動(dòng)副正確的創(chuàng)建在各個(gè)位置之后,創(chuàng)建運(yùn)動(dòng)軌跡,并添加4個(gè)驅(qū)動(dòng)和相應(yīng)的驅(qū)動(dòng)函數(shù)。機(jī)械臂的仿真結(jié)果如圖5所示。
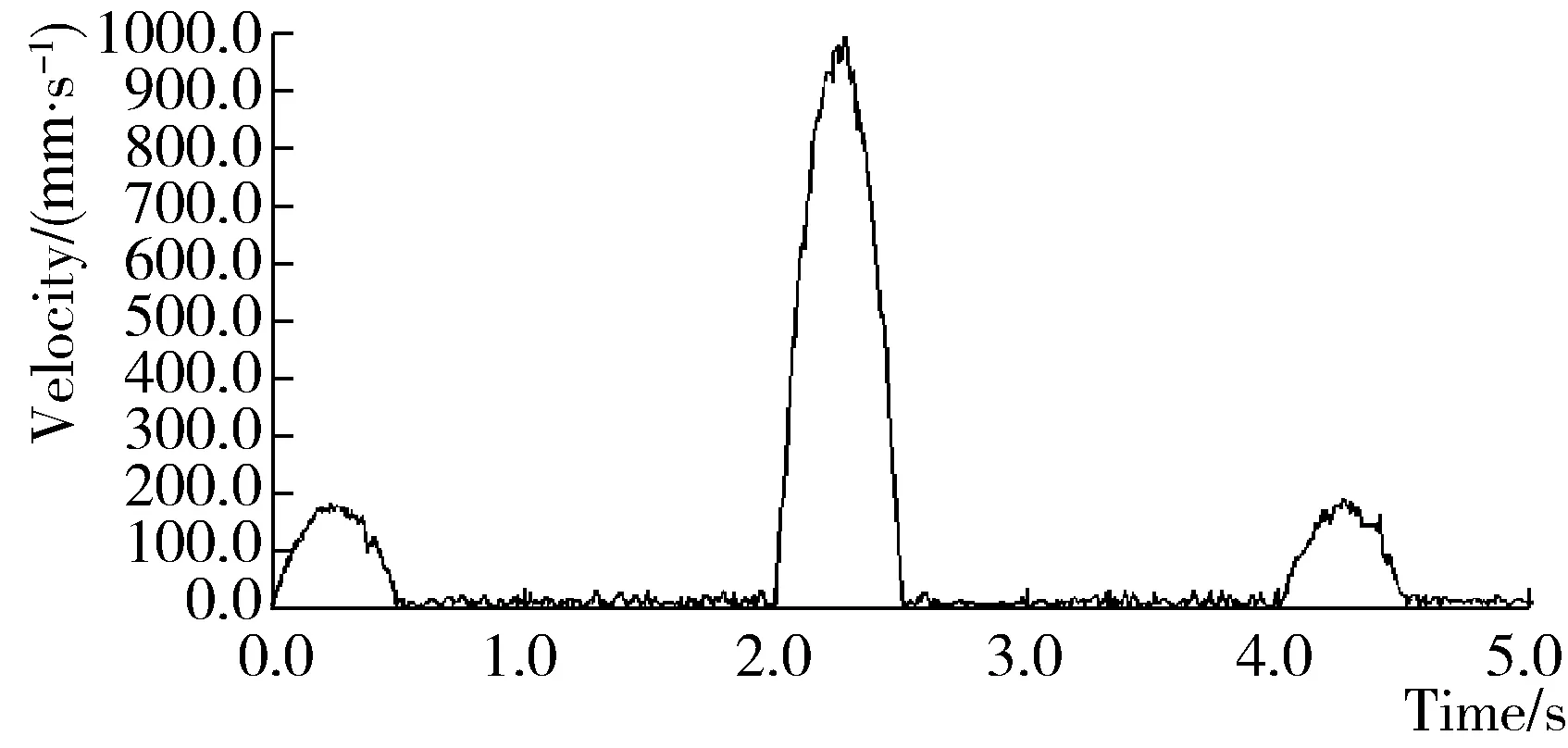
由圖5可知,其中前1 s內(nèi),氣動(dòng)伸縮桿始終處于初始位置,隨后開(kāi)始伸長(zhǎng),整個(gè)運(yùn)動(dòng)軌跡中的最大伸長(zhǎng)長(zhǎng)度為70 mm,其運(yùn)動(dòng)過(guò)程中的速度曲線(xiàn)幾近平穩(wěn),符合機(jī)械臂在番茄枝葉裁剪期間,需要將末端執(zhí)行器穩(wěn)定的送到指定工作位置的要求。
由氣動(dòng)伸縮桿外殼的位移曲線(xiàn)可知整個(gè)工作過(guò)程中,氣動(dòng)伸縮桿最大位移量為140 mm,由于氣動(dòng)伸縮桿外殼承載著氣動(dòng)伸縮桿,故其位移長(zhǎng)度不可太大,140 mm符合要求。
(a) 氣動(dòng)伸縮桿外殼位移
(b) 末端位移
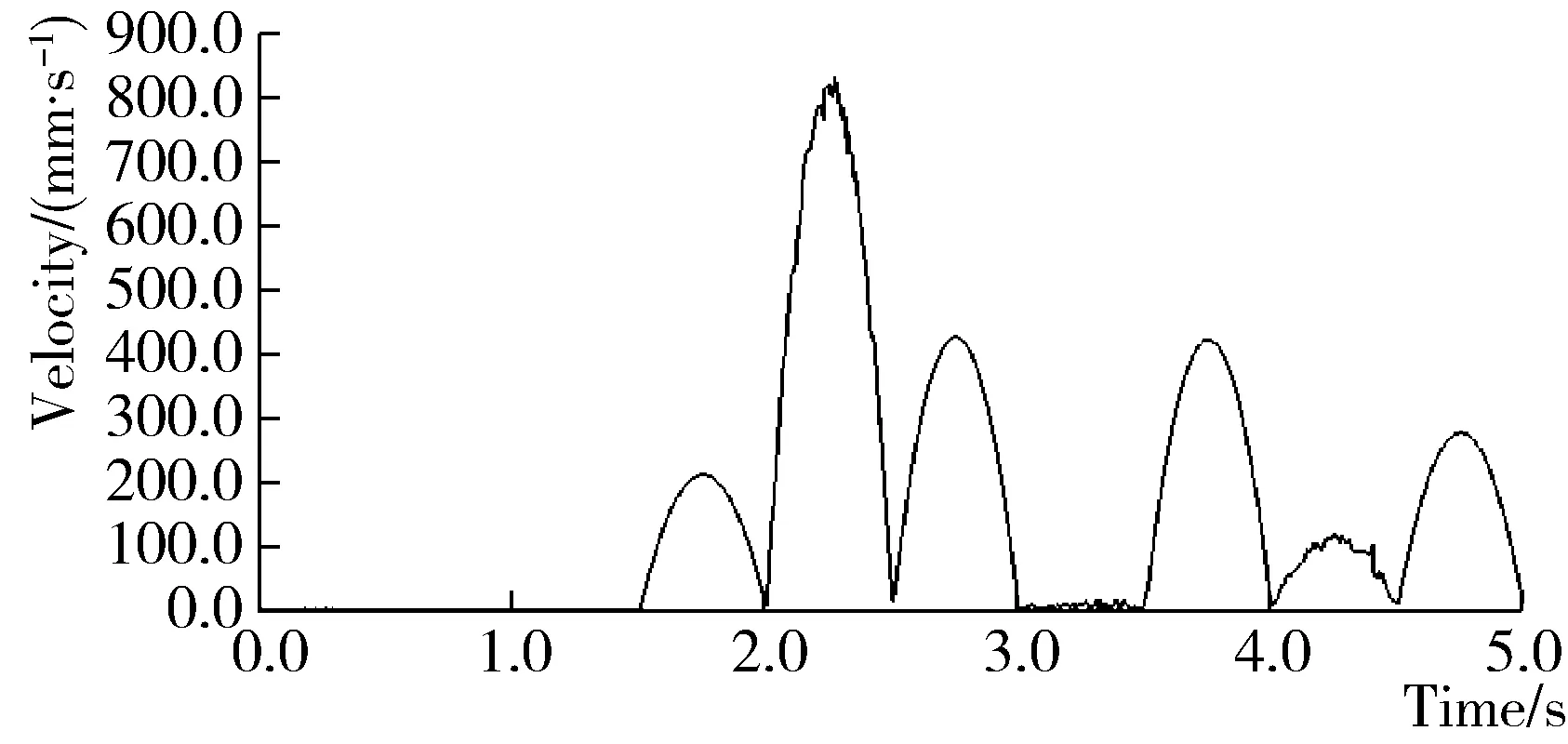
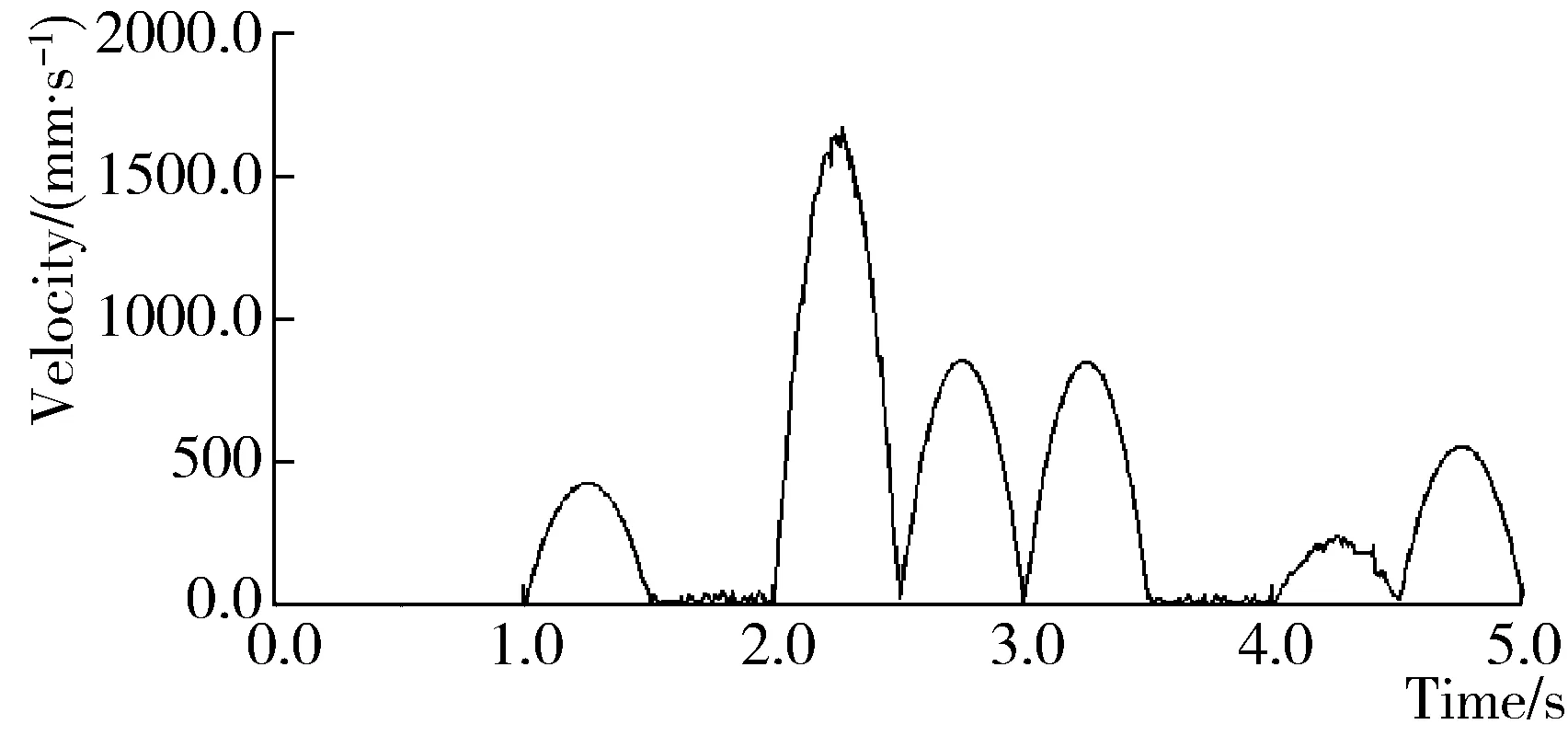
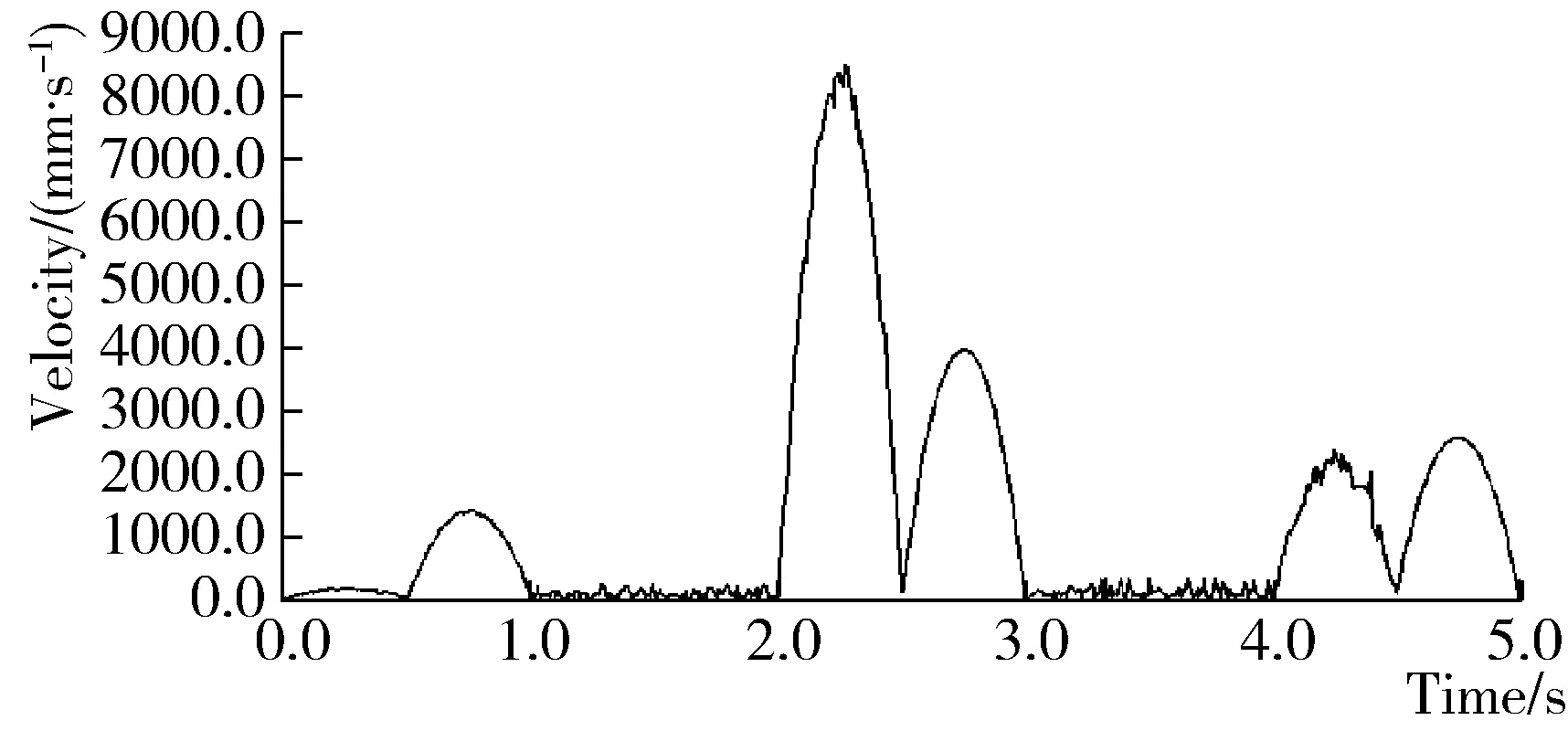
(c) 末端速度
(d) 氣動(dòng)伸縮桿外殼速度
(e) 伸縮桿外殼速度
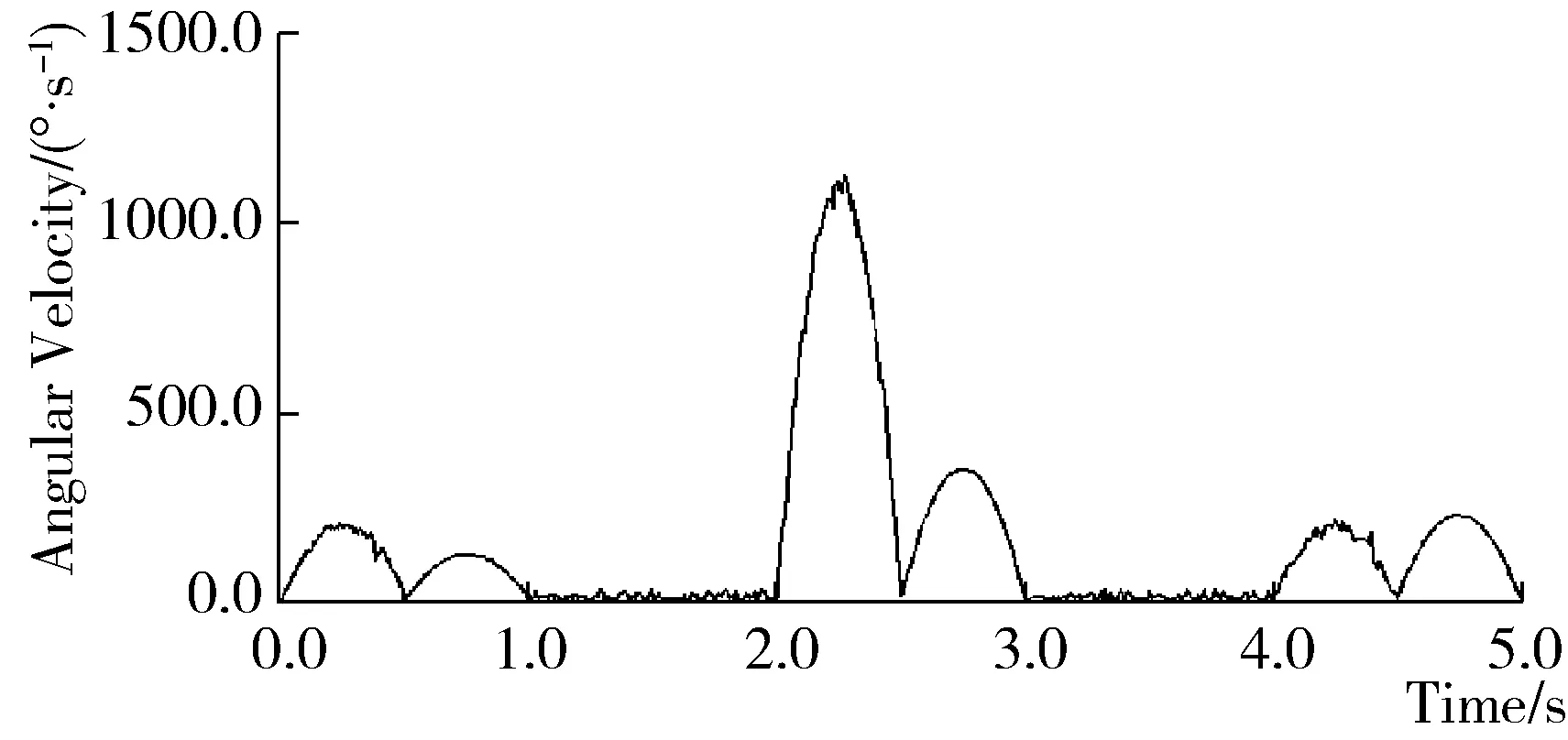
(f) 伸縮桿外殼角速度
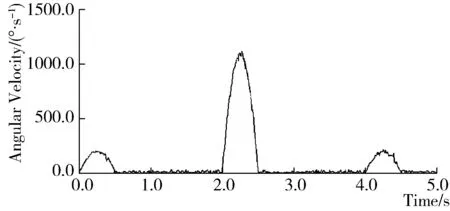
(g) 主傳動(dòng)軸角速度
(h) 主傳動(dòng)軸速度圖5 機(jī)械臂的仿真結(jié)果圖Fig. 5 Simulation results of manipulator
由于伸縮桿外殼只做俯仰運(yùn)動(dòng),故只需關(guān)注其速度和角速度即可,整個(gè)伸縮桿的外殼的速度和角速度曲線(xiàn)如圖5(e)和圖5(f)所示,在整個(gè)仿真過(guò)程中,速度波動(dòng)范圍在10 mm/s以?xún)?nèi),角速度的波動(dòng)在5°/s以?xún)?nèi),相對(duì)于工作時(shí)的速度,可以忽略不計(jì),故其整體的速度和角速度曲線(xiàn)比較穩(wěn)定,有波動(dòng)的主要原因是俯仰電機(jī)和伸縮桿外殼之間有安裝一個(gè)齒輪減速器,在傳動(dòng)過(guò)程中會(huì)有震動(dòng),導(dǎo)致其速度和角速度曲線(xiàn)會(huì)有波動(dòng)。
圖5(g)和圖5(h)為主軸的速度和角速度圖,總體平穩(wěn),其中速度的波動(dòng)范圍在5 mm/s以?xún)?nèi),角速度的波動(dòng)范圍在5°/s以?xún)?nèi),引起速度和角速度波動(dòng)的原因?yàn)槲佪單仐U傳動(dòng)的震動(dòng)。
綜上,整個(gè)機(jī)械臂的各個(gè)關(guān)節(jié)的位移、速度和角速度,整體平穩(wěn),由傳動(dòng)機(jī)構(gòu)引起的波動(dòng)可忽略不計(jì)。
4 機(jī)械臂工作空間分析
4.1 機(jī)械臂工作空間求解
機(jī)械臂的工作空間是機(jī)械臂末端執(zhí)行器所能到達(dá)的所有點(diǎn)的集合,運(yùn)用集合的概念,其工作空間可表示
(3)
式中:P——機(jī)械臂的工作空間;
(Px,Py,Pz)——機(jī)械臂末端的位置坐標(biāo);

4.2 機(jī)械臂工作空間的仿真驗(yàn)證
運(yùn)用MATLAB中的Robotics工具箱建立機(jī)械臂的仿真模型,如圖6所示。
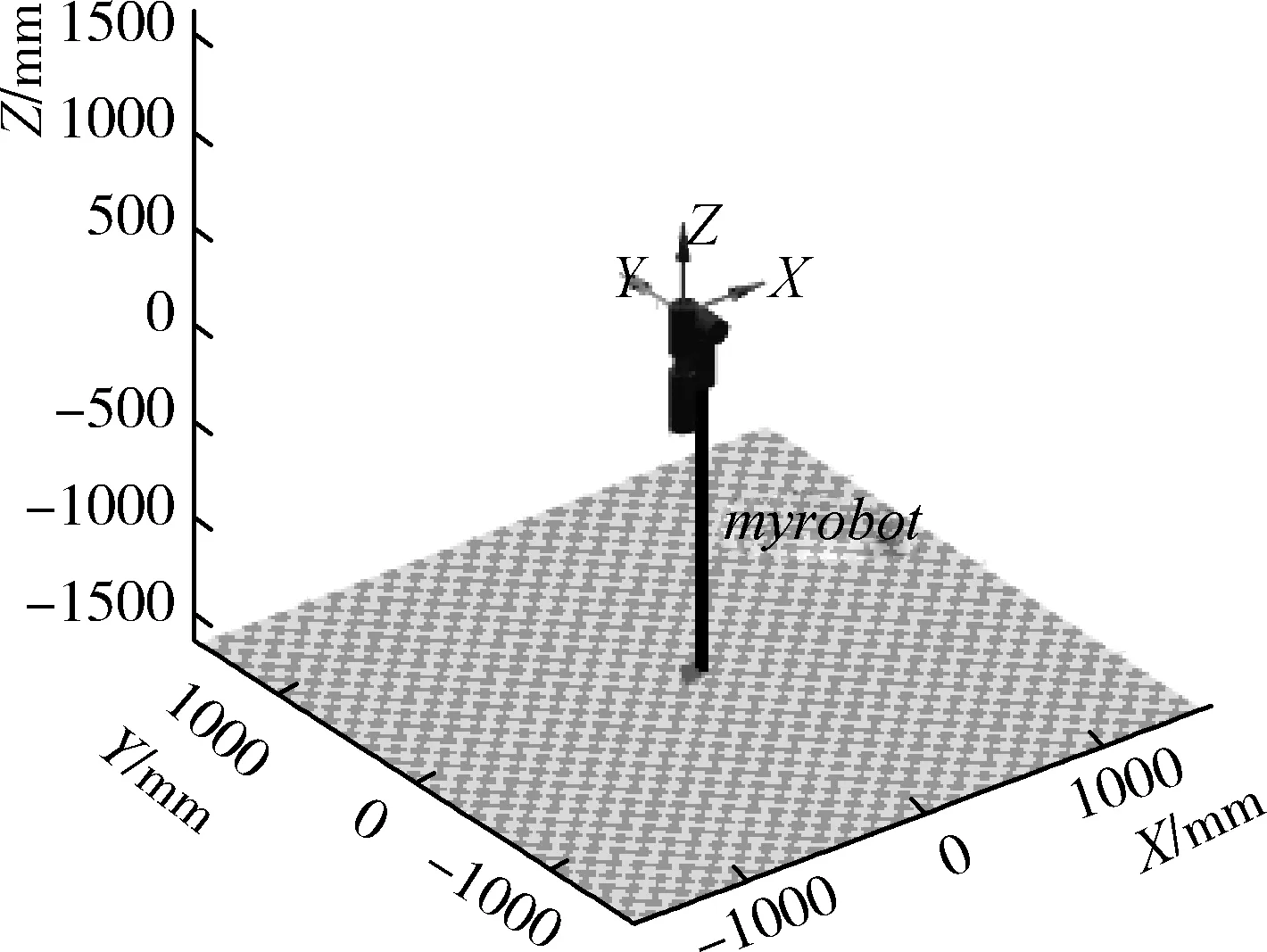
圖6 機(jī)械臂虛擬仿真模型Fig. 6 Virtual simulation model of manipulator
通過(guò)混合同語(yǔ)法產(chǎn)生隨機(jī)函數(shù),在MATLAB軟件環(huán)境中用蒙特卡對(duì)機(jī)械臂的工作空間進(jìn)行求解。取仿真的隨機(jī)數(shù)個(gè)數(shù)為100 000,即100 000組隨機(jī)的關(guān)節(jié)角組合,可得到100 000個(gè)機(jī)械臂末端坐標(biāo),進(jìn)而得到機(jī)械臂工作空間的點(diǎn)云圖,點(diǎn)云圖的三維圖如圖7所示。
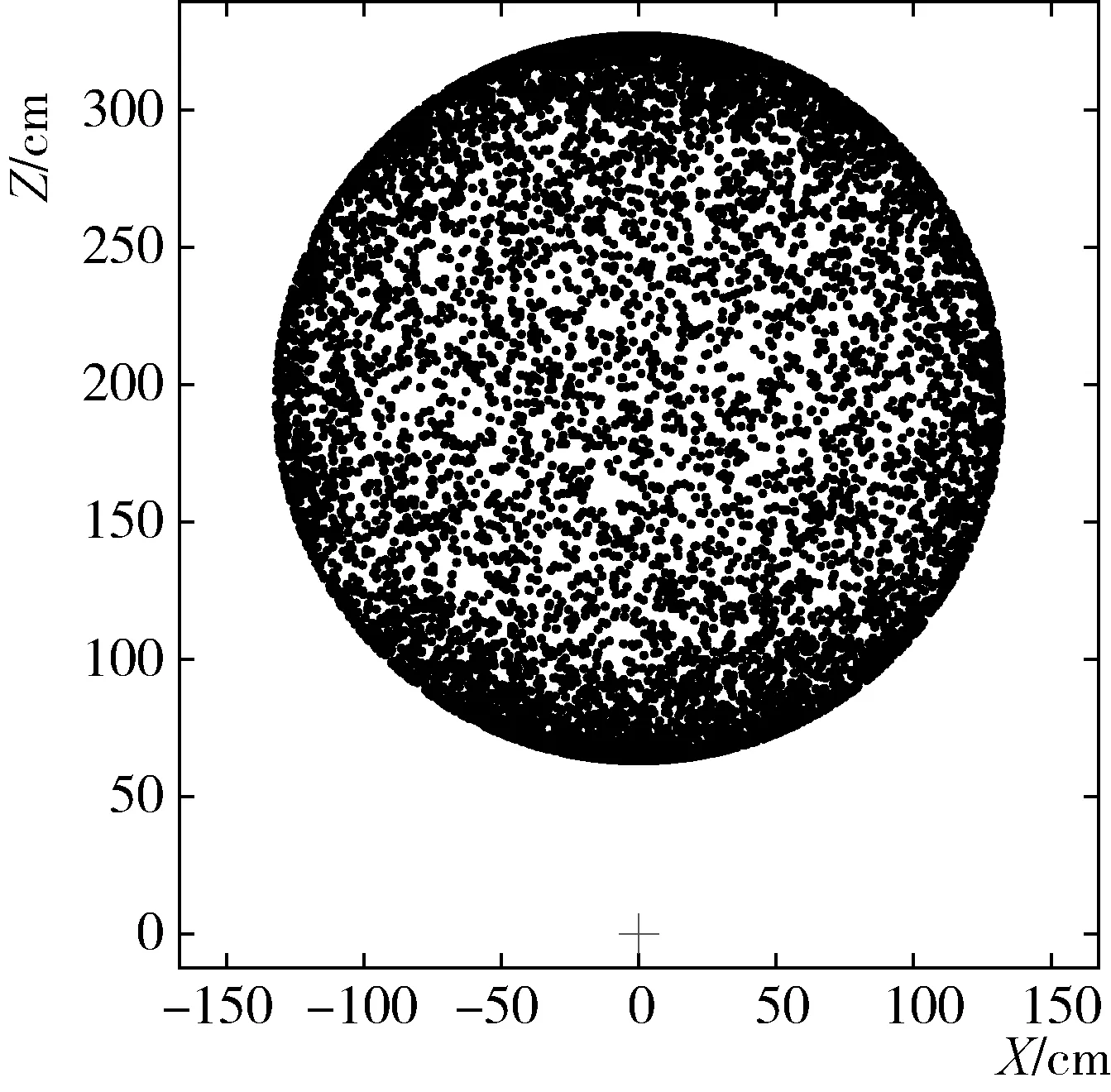
(a) 工作空間在XOZ平面投影
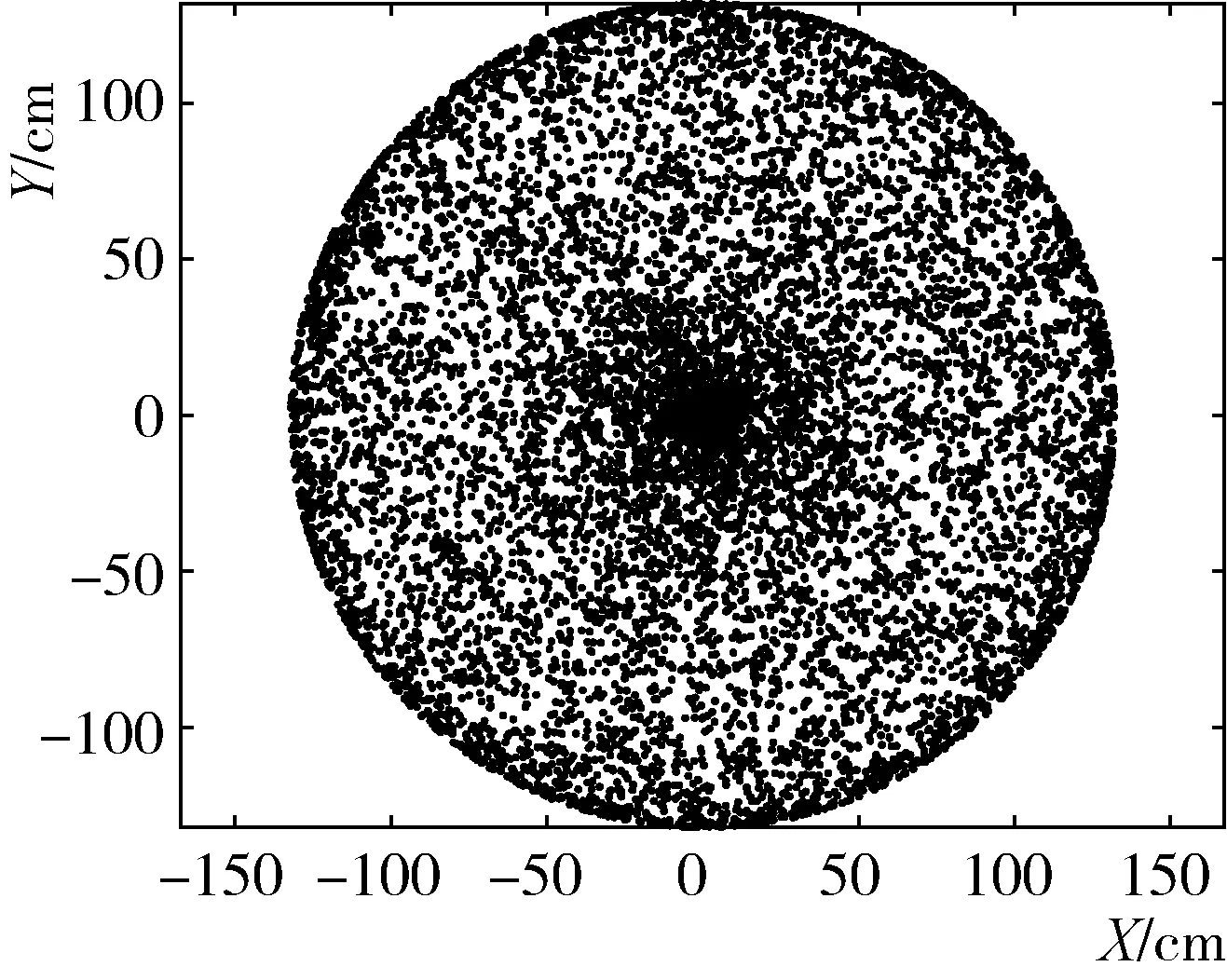
(b) 工作空間在XOY平面投影
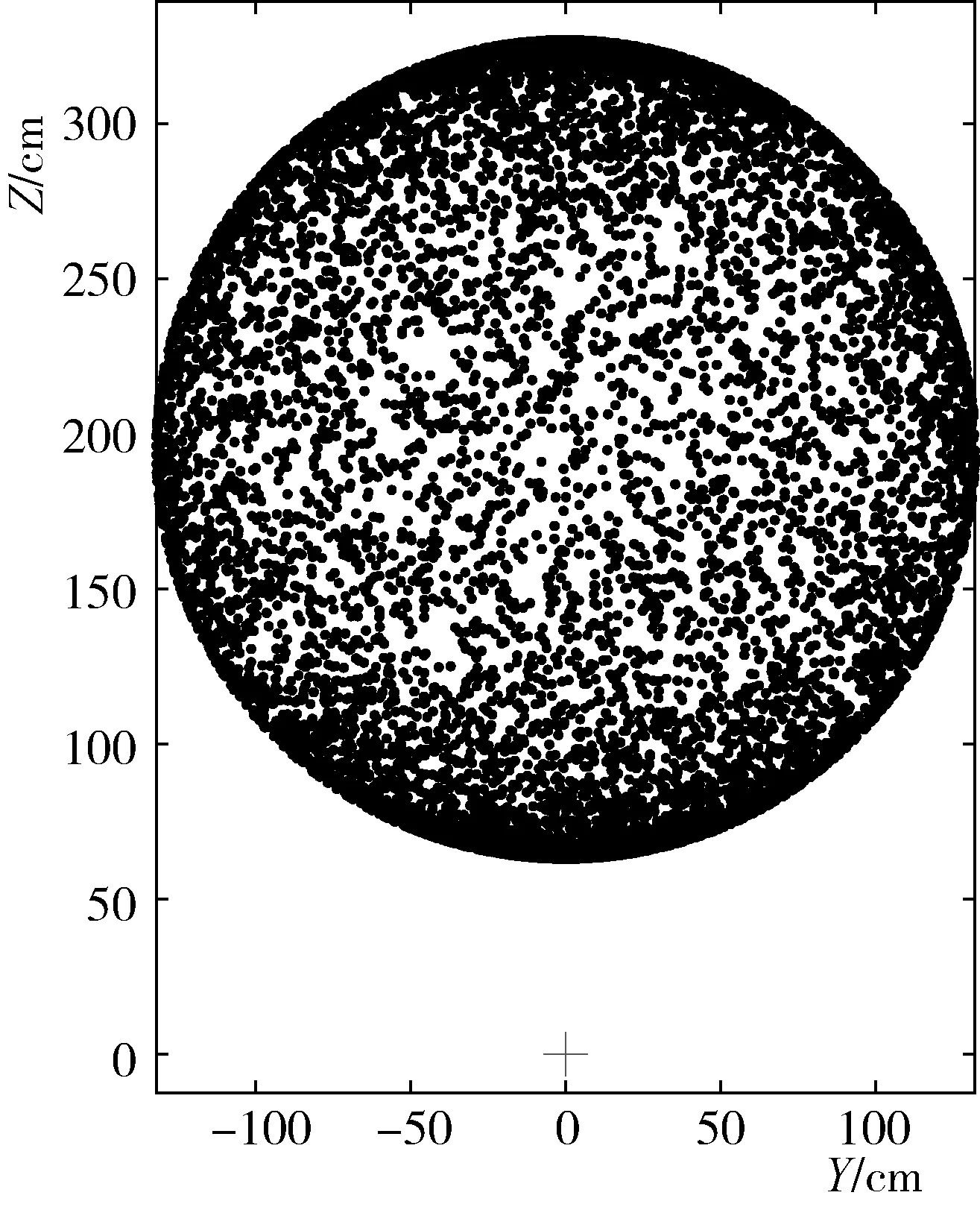
(c) 工作空間在YOZ平面投影圖7 機(jī)械臂工作空間點(diǎn)云圖Fig. 7 Point cloud of manipulator workspace
由圖7可知,仿真結(jié)果圖和理想狀態(tài)一樣,工作空間同為球狀。從圖中可以看出:機(jī)械臂的工作空間在X軸上的分布范圍為-135~135 cm,在Y軸上的分布范圍為-135~135 cm,在Z軸上的分布范圍為65~335 cm。
因此,該機(jī)械臂的工作空間的高度范圍為65~335 cm,而番茄植株的高度為0.6~2 m,故該機(jī)械臂的工作空間滿(mǎn)足番茄枝葉裁剪時(shí)的需求。
5 結(jié)論
1) 采用兩級(jí)伸縮桿,兩級(jí)伸縮桿工作時(shí),行程可以更長(zhǎng),不工作時(shí),可以縮的較短,適用于安裝在空間受到限制而行程要求很長(zhǎng)的場(chǎng)合,番茄種植大棚即為該類(lèi)型場(chǎng)合,且兩級(jí)伸縮桿能更穩(wěn)定的將末端執(zhí)行器送到指定位置進(jìn)行作業(yè),結(jié)構(gòu)簡(jiǎn)單,穩(wěn)定性高。蝸輪蝸桿結(jié)構(gòu)傳動(dòng)平穩(wěn),這對(duì)整個(gè)機(jī)械臂的傳動(dòng)性能有很大作用。能使末端執(zhí)行器在裁剪番茄枝葉時(shí),更加穩(wěn)定的作業(yè)。
2) 通過(guò)Adams軟件對(duì)機(jī)械臂進(jìn)行歸集仿真,結(jié)果表明:機(jī)械臂完成整個(gè)裁剪和復(fù)位的過(guò)程,用時(shí)能在5 s以?xún)?nèi),且各個(gè)主要傳動(dòng)部件的速度在工作時(shí)的波動(dòng)不超過(guò)10 mm/s,在工作時(shí)角速度的波動(dòng)不超過(guò)5°/s,且整體平穩(wěn),適合番茄枝葉裁剪的工作。
3) 通過(guò)MATLAB軟件對(duì)機(jī)械臂的工作空間進(jìn)行分析,結(jié)果表明機(jī)械臂的工作空間高度范圍在65~335 cm內(nèi),符合番茄植株的生長(zhǎng)高度特性,滿(mǎn)足番茄枝葉裁剪要求。
4) 本文機(jī)械臂用于帶動(dòng)末端執(zhí)行器,將末端執(zhí)行器送到指定裁剪位置進(jìn)行裁剪作業(yè),通過(guò)上述對(duì)機(jī)械臂的分析,該機(jī)械臂滿(mǎn)足要求。
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
