基于上肢肢體殘疾人群體育服務的EMG仿生手設計與開發研究
2021-05-11 10:41:46張皓銘鄭州大學
灌籃 2021年3期
關鍵詞:信號
張皓銘 鄭州大學
國家出臺的《“健康中國2030”規劃綱要》中明確提出“要推動殘疾人康復體育和健身體育廣泛開展”。殘疾人是人類社會的重要組成部分,也是社會發展不能忽視的一個重要群體。生命在于運動,這對殘疾人來說尤其重要,運動也是身體康復的重要基礎。中國歷來重視殘疾人體育運動,在古代有很多名醫運用吐納、五禽戲、八段錦等各種體育活動治療殘疾人疾病的例。在當今社會,政府也十分重視殘疾人群體。
發展殘疾人體育運動是政府和社會對弱勢群體關愛的具體體現,也能從人文角度促進健康成長,通過運動,促進其身體盡快康復,最大限度地矯正和補償他們的身心缺陷,恢復、保持和提高他們生活、學習和工作的能力,使其成為自食其力的社會大家庭中平等的一員。經常參加體育運動可以有效地改進殘疾人身體各器官、各系統的功能,提高整個機體的免疫能力,“用進廢退”說明合理的體育鍛煉,不僅可以避免殘疾人身體其他部位肌肉的萎縮和神經壞死,而且還能使機體獲得改善與發展。
對于這一“idea”我們成功申請了鄭州大學的國家級大學生創新創業訓練計劃項目,我們根據上肢肢體殘疾人的殘缺特點,開始了EMG仿生機械假肢設計與研發。
一、功能概述
該肌電助殘仿生手能夠幫助手掌缺失殘疾人完成一些生活中需要用到雙手的簡單的動作。在手掌缺失患者的小臂上佩戴兩個傳感器,傳感器采集數據對使用者的運動意圖進行結算估計,從而控制仿生手運動。目前國內僅僅單自由度的機械手較為普及,但單自由度很難幫助患者完成一些較為復雜的動作,而多自由度的肌電仿生手則造價及其高昂,一般家庭很難負擔得起。我們則另辟蹊徑,運用獨特的技術路線(多路獨立采集處理,自適應算法,軟硬件濾波降噪),用極低的成本實現了四個自由度的肌電助殘手,且在低成本內將性能和可靠性盡可能地提高了。
基于肌電技術,使機械手能夠按照使用者的意識運動,同時肌電技術常運用與截肢患者術后康復訓練,該機械手具有幫助患者術后康復的作用。由于使用了多路獨立采集處理,低價處理器,電路集成技術,該產品具有成本低廉,性價比高,性能可靠的優點。運用了自適應算法,令使用者不需要經常找技術人員進行參數校準,帶上肌電傳感器即可使用。作品運用多種信號處理降噪濾波方法(硬件降噪,算法濾除工頻干擾,數字低通濾波,Willison濾波算法),克服了低成本所帶來的不可避免的干擾問題,實現了較高準確度的識別。
二、EMG仿生手設計思路
(一)EMG仿生手的信號源
本設計選擇了肌電信號作為EMG仿生手的控制信號源,皮膚表面肌電信號是伴隨在肌肉收縮時產生的電信號,可以在人體表面檢測肌肉活動。對康復醫學和體育科學有巨大的應用背景,應用肌電技術能夠快速反映出人體想要表達的控制意愿。輸出信號的大小取決于選定肌肉的活動量,輸出信號的波形可顯著指示被觀察位置皮下肌肉的運動情況,方便做肌電信號的分析與研究。
(二)EMG仿生手肌電信號的采集
肌電假肢是由截肢者的大腦神經支配殘肢肌肉運動產生肌電信號,通過將肌電信號放大后用來控制微型電機,帶動傳動系統,驅動假肢動作。由于肌電假肢的運動接受大腦指揮,它除了具有電動假肢的長處外,還具有直感性強、控制靈活和使用方便等優點。
人體手臂在肌肉屈伸時,檢測電極會檢測到手臂表面的肌電信號的變化,針對殘疾人身體缺陷的不便以及人體正常肢體手部的運動特點,在這里通過兩個EMG傳感器采集皮膚表面的生物靜電信號,針對解決多傳感器相互影響的嚴重噪聲問題。提出了解決多單片機系統的方案實現對生物靜電信號的采集。兩個傳感器分別置于小臂的拇長屈肌和尺側腕屈肌,依次接在兩個系統上。
(三)EMG仿生手信號的處理
肌電信號有效頻譜范圍在20Hz到500Hz之間,而截取20Hz到150Hz之間的信號就足夠用以運動解算。由奈奎斯特采樣定理,系統只需要采用大于300Hz的采樣頻率即可還原原始信號,采樣頻率越高還原度越高。故采用1000Hz 采樣頻率既可兼顧運算速度又可兼顧信號準確性。故采用巴特沃斯二階高通濾波器截掉低于20Hz的無用信號,用巴特沃斯二階低通濾波器截掉高于150Hz的信號,同時再使用四階巴特沃斯濾除50Hz工頻干擾即可得到極易處理的數據集。
低通濾波器采用二階巴特沃斯低通濾波器,由于出于計算性能的考慮,截止頻率為150Hz,濾波器參數為:
numerator:{0.3913,0.7827,0.3913},{0.1311,0.2622,0.1311}
Denominator:{1.0000,0.3695,0.1958},{1.0000,-0.7478,0.2722}
高通濾波器采用二階巴特沃斯高通濾波器,截止頻率為20Hz,濾波器參數為:
Numerator:{0.8371,-1.6742,0.8371},{0.9150,-1.8299,0.9150}
Denominator:{1.0000,-1.6475,0.7009},{1.0000,-1.8227,0.8372}
陷波濾波器采用四階巴特沃斯陷波濾波器,使用兩個二階巴特沃斯濾波級聯產生,截止頻率50Hz,主要目的是濾除工頻干擾。濾波器參數為:
Numerator:{0.9522,-1.5407,0.9522,0.8158,-0.8045,0.0855},{0.5869,-1.1146,0.5869,1.0499,-2.0000,1.0499}
Denominator:{1.0000,-1.5395,0.9056,1.0000-1.1187,0.3129},{1.0000,-1.8844,0.9893,1.0000,-1.8991,0.9892}
隨后對信號運用Willison算法進行處理:
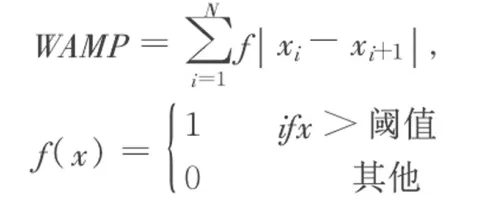
對信號的導數進行分析,結果顯示,經過前面對信號的預處理及濾波,得到的數據極易分析,從中提取出特征點。
(四)EMG仿生手自適應調節參數以及控制
該EMG仿生手的自適應參數通過代碼執行初始化函數實現。
系統開啟穩定后,將給予使用者一個可視信號,引導使用者做出相應的動作,對信號持續采集儲存,并綜合處理計算出合適的閾值。
得到的閾值具有時效性,適應當前使用者的肌肉狀態,皮膚狀況,以及傳感器位置等,省去的煩瑣高深的人工參數調節步驟,具有極大的便捷性,實現即穿即用,將整個系統轉變為“黑盒”,解決了以往離不開專業人士進行參數調節的問題。
三、EMG仿生手使用條件與局限
首先,該EMG仿生手的使用者手掌缺失患者,故要求使用者前臂殘肢的肌肉及神經健康。由于截肢后患者殘肢肌肉可能存在收縮不穩定等問題,故需要進行一定的練習才能夠掌握。
其次是EMG仿生手設計外部條件的制約。肌電技術目前發展水平有待提高,很多肌電技術相關的EMG仿生手停留在研究階段或者理論階段,所以,肌電技術發展是該EMG仿生手制約的外部分條件。
最后,傳感器問題。由于設計中沒有開發設計傳感器,該EMG仿生手設計中使用的傳感器需要購買,所以存在因為購買傳感器成本控制的局限。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06