駕駛經驗對安全車速選擇影響的研究
2021-05-08 03:16:24王靖誼
公路交通技術 2021年2期
王靖誼
(山東建筑大學 交通工程學院,濟南 250100)
駕駛員作為人-車-路環境所構成的動態復雜系統中最不穩定的主體,其駕駛行為受道路及環境影響,并直接影響車輛的運行安全。根據文獻[1]研究,我國的道路交通事故在很大程度上與車輛駕駛人員“過高的安全車速控制”有關,即在實際行駛過程中,沒有保持與道路條件及行駛環境相協調的“安全車速”。據此分析,安全車速應是在特定的道路條件、環境等綜合情景下,在法律法規和道路標志線規定的限速范圍內,車輛能夠確保安全所允許的最大行駛車速[2],具有道路及環境約束下保證安全的“客觀性”。即某個路段的安全車速由客觀道路環境所提供,但需要被駕駛員正確感知。也就是說,駕駛員通過對系統環境的感受,綜合各種因素,在自我心中產生一種在確保安全的情況下,希望所達到的“目標車速”,又稱為“期望車速”[3],即指車輛在不受其他車輛約束的條件下,駕駛員希望所達到的最高“安全”車速。然而,“期望車速”并非在道路上行駛的真正的安全速度,而是駕駛員個體自認為的安全速度[4]。
針對預期車速和安全車速問題,科技人員做了較多研究。涂輝招等[5]通過表征駕駛員主觀認知的“預期車速”和車路環境的“安全車速”的車速差對高速公路的行車安全水平進行了建模分析。郭鳳香等[6]提出了預測駕駛員期望車速的全新方法,在一定程度上可為國內的道路設計和交通安全評價提供速度依據。李海青等[7]使用期望安全車速作為閾值,驗證了高速避障路徑跟蹤與控制策略能夠高效避障。崔航等[8]綜合考慮多種因素提出的“建議車速—預期車速”模型,體現了駕駛員的主觀認知與道路客觀環境不匹配性產生的安全風險。
從駕駛過程中安全認知的角度,駕駛員在各種情境下的預期速度是復雜的交通環境中多種因素綜合作用的結果,駕駛員對行駛環境安全性的判斷決定了其所選擇的車速。李鑫銘等[9]在研究影響期望車速的因素時,對駕駛員特性進行了研究。吳玲等[10]通過駕駛試驗對熟練駕駛人和非熟練駕駛人在隧道路段的安全車速進行研究,結果表明,二者在隧道路段的車速差相對較小,但在普通路段則有相對較大的車速差。根據文獻[11],新手與有經驗的駕駛員之間存在危險反應時間及對環境線索利用之間的差異。此外,Benda[12]還指出,經驗不足的駕駛員更注重情況的細節和判斷危險性的類型,而有經驗的駕駛員則會更全面地判斷危險性。
據上分析,現有研究主要集中于安全車速的預測方面,但針對駕駛經驗與安全車速之間相關性的研究較少。本文將駕駛員根據駕齡長短及是否常跑高速劃分為有經驗駕駛員與無經驗駕駛員,在給定的不同道路環境的因素下進行情景試驗,結合數據分析,對駕駛經驗是否會對安全車速的感知產生影響進行分析。
1 計算方法
1.1 試驗情景設計
由于在人-車-路環境中,可組合的情景有很多種,在情景試驗的選取中,不可能對每一種情景都進行試驗。因而,本文選取典型情景進行試驗,在試驗中,除了考慮標準情景,還考慮了其他因素的不利狀態,共選取7種情景,如表1所示。
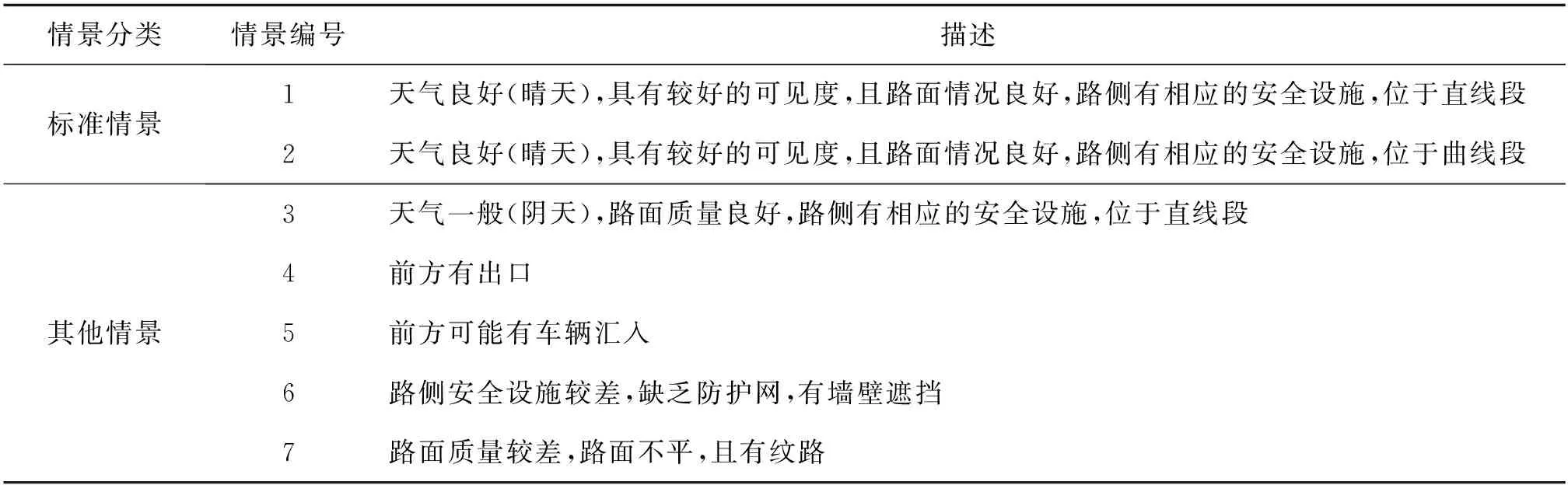
表1 試驗情景
1.2 試驗方法
在本次研究中,通過向駕駛員發放調查問卷進行情景試驗。問卷的內容包括2部分:第1部分為基本統計信息,內容涉及駕駛員的年齡、實際駕齡、是否經常開車、是否常跑高速;第2部分為根據試驗情景及相應的文字描述,給出駕駛員在所給的情景中的期望達到的車速。
1.3 樣本規模
根據文獻[13]研究,試驗分析所需的最佳樣本量公式為:
所需樣本規模=[(所需最小樣本量×100)÷(預期平均百分比響應率)]。
當最小樣本量為200個,平均響應率為48%時,樣本規模相對較好。根據最佳樣本量公式,本次研究所需的樣本數量為417份。本次研究共發放820份問卷,其中回收有效數據424份,平均響應率為51.7%,符合所需的樣本規模要求。
2 標準情景下安全車速相關性分析
2.1 試驗數據分布檢驗
在理論上,試驗數據應符合正態分布。下面選取標準情景1、2,即標準情景下的直線段、曲線段的試驗數據進行檢驗分析,驗證試驗數據的分布特征,如圖1所示。
由圖1可以看出,在標準情景下,駕駛員的安全車速分布集中,呈現中間亮、兩側低的分布規律,且數據點與理論直線(即對角線)基本重合,數據服從正態分布,故而標準情景中的安全車速試驗值基本符合正態分布。
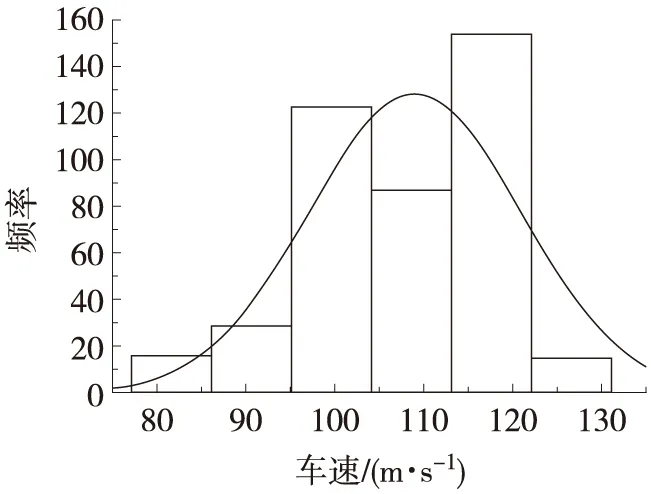
(a) 情景1頻率分布圖
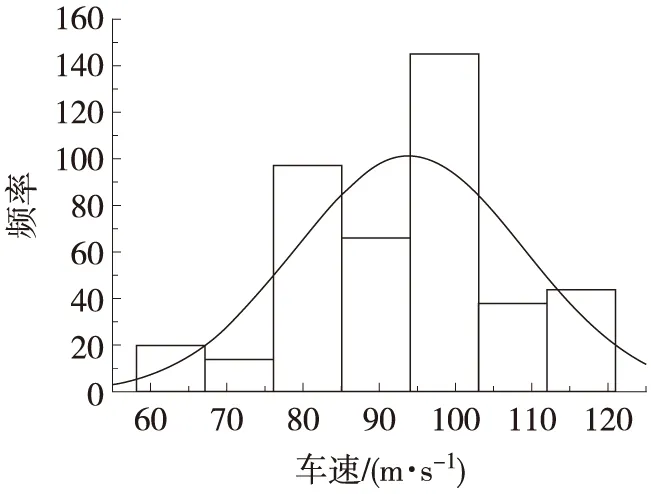
(b) 情景2頻率分布圖
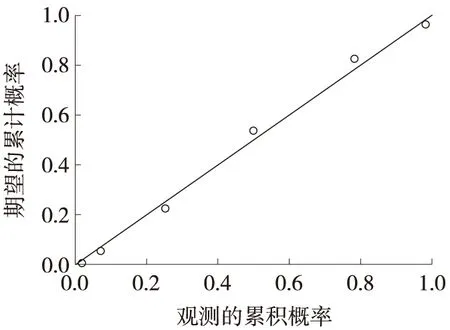
(c) 情景1 P-P圖
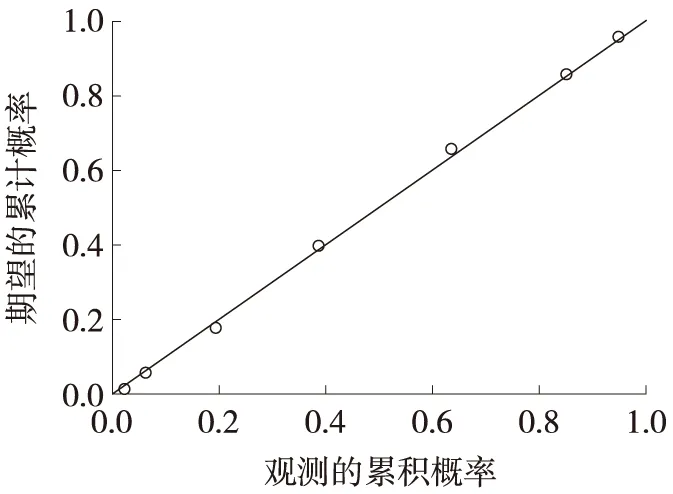
(d) 情景2 P-P圖
2.2 與計算安全車速對比分析
在直線段,考慮前車靜止[14]的情況下,根據美國AASHTO所提出的視距模型,計算安全車速可由以下公式得出:
(1)
式中:v為初始速度,m/s;f為路面附著系數;Lv為路段的可視距離,m,另外,前車距離與安全距離取值均為5 m。
在曲線段,根據澳大利亞車速預測模型,并通過實測數據進行回歸分析[15],計算安全車速可由以下公式得出:
V=13.016R0.32
(2)
式中:R為平曲線半徑,m。
根據上述提出的計算安全車速公式,選取標準情景作為計算條件(能見度>200 m,路面質量良好,道路附著系數f取0.8;曲線段的半徑R取800 m),標準情景下安全車速與計算安全車速比較如表2所示。
由表2可知,情景試驗安全車速的取值范圍都在計算的安全極限車速的約束之內。
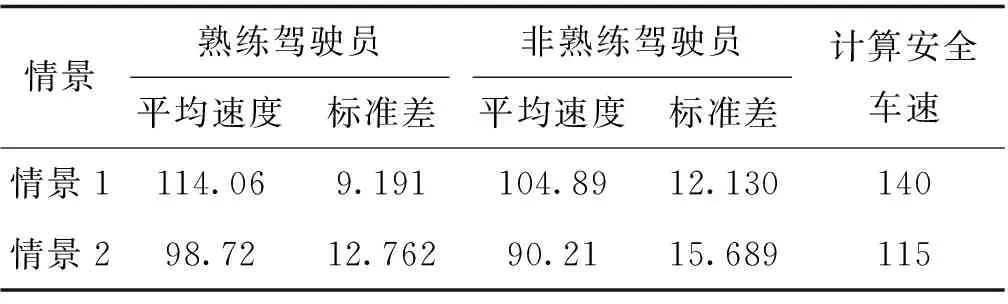
表2 標準情景下安全車速與計算安全車速比較 km/h
3 其他因素情景與標準情景安全車速相關性分析
在各種情景下,不同熟練度的駕駛員選擇的安全車速的分布應具有規律性,為了驗證規律性,對各個典型情景的安全車速的分布特征進行分析。下面以限速120 km/h為例進行試驗分析。
3.1 標準情景分析
對標準情景的試驗數據進行分析,得到相關數據如表3所示。
表3試驗數據的標準差反映了駕駛員在情景中的離散程度,標準差的數值越大,駕駛員的預期車速越不穩定。在情景1中,也就是標準場景的直線段,熟練駕駛員心中的“安全車速”較為均衡,非熟練駕駛員的“安全車速”穩定性相對較差。而在曲線段,不同個體駕駛員所選擇的速度差異變大,相對于非熟練駕駛員,熟練駕駛員心中的“安全車速”仍然具有相對較好的穩定性。

表3 標準情景分析 km/h
3.2 其他情景分析
3.2.1 天氣作為影響因素
本次情景試驗選擇天氣作為影響因素時,僅考慮了陰天情況,未考慮雨雪天氣、霧天等特殊情況。通過對情景3的數據進行分析,所得數據如表4所示。
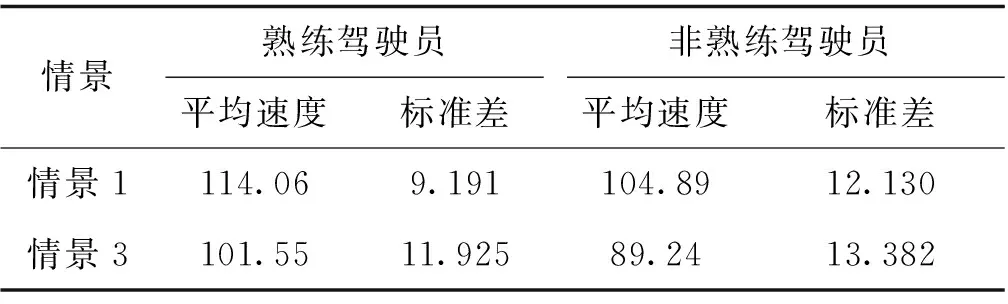
表4 天氣狀況影響分析 km/h
在陰天的情況下,能見度與晴天相比相對較低,駕駛員一般會保持或稍微降低車速[16]。與標準情景相比,車速的平均值總體都有所降低。由于熟練駕駛員與非熟練駕駛員對于情景的感知不同,安全車速的感知范圍也相應出現差別。
3.2.2 出口或有車流匯入、路側安全設施及路面質量作為影響因素
出口或車流匯入影響分析以及路側安全設施及路面質量影響分析如表5所示。
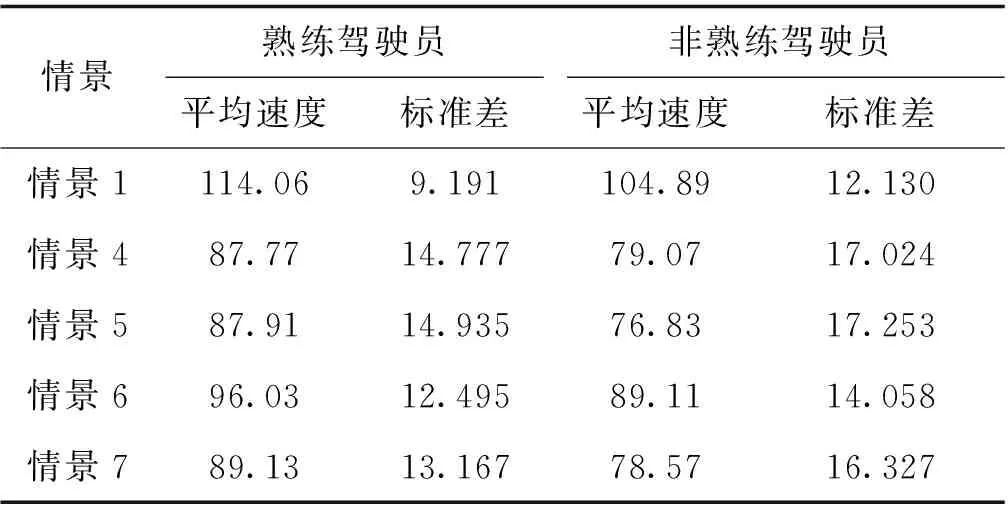
表5 出口或車流匯入影響分析以及路側安全設施及路面質量影響分析 km/h
車輛的分流與合流是引發交通事故的重要誘因[17]。在高速路段,出口和車輛匯入處都設在高速公路的直線段處,因此,將情景4和情景5與標準情景進行對比分析。由表5可知,在有出口或車輛匯入的直線段,車速平均值總體均有明顯降低。盡管不同熟練度的駕駛員的安全速度的選擇范圍都出現了較大變化,但相比于非熟練駕駛員,熟練駕駛員的安全車速依舊相對均衡。
情景6、情景7分別設置了與路側安全設施和路面質量有關的情景試驗,以探究路側安全設施和路面質量是否會對駕駛員安全車速的選擇產生影響。從表5可知,與情景1相比,情景6和情景7在路側安全設施較差和路面質量差的時候,車速平均值總體均有明顯降低。由于駕駛員存在個體差異,選擇的標準情景車速不同,標準差的范圍較大。尤其是當路面質量差的時候,對駕駛員安全車速的影響尤為明顯。駕駛員行駛在路面質量差的路段時,普遍選擇相對較低的行駛速度通過,以保證自身的安全。
以上通過對影響安全車速的單因素進行了分析,可以看出道路線形、天氣因素、出入口、路側安全設施以及路面質量對駕駛員主觀安全車速的影響都存在明顯規律性,且主觀選擇的安全車速低于標準情景的安全車速,不同的影響因素對熟練駕駛員和非熟練駕駛員的安全車速選擇都造成消極影響,但不同因素的作用效果并不一致。
4 情景試驗的信度分析
4.1 各情景試驗數據信度
為了驗證各情景試驗結果的信度,對不同時間點、相同試驗人員及同一批試驗情景的試驗結果數據進行相關性分析,用相關系數來反映變量之間相關關系的密切程度。這里采用皮爾遜積差相關分析[16],相關系數計算公式如下:
(3)
由于曲線段較直線段更易引起較大的離散程度,為更好驗證相關性,對曲線段(情景2)進行重復試驗,試驗間隔相差7 d,相關性計算結果如表6所示。

表6 首次測試與第2次測試的相關性分析
試驗人員在經過一段時間后,重新進行相應的試驗,首次測試與第2次測試所得結果具有顯著相關性,在很大程度上說明了本次情景試驗的安全車速試驗具有穩定性和可靠性。
與此同時,為了進一步驗證試驗總體的可靠性,對各情景試驗所構成的總體數據進行了綜合信度評估。
4.2 情景試驗綜合信度評估
在對情景試驗的總體結果進行信度評估時,利用克隆巴赫系數對7個情景進行內部一致性分析,得到α為0.862。
既往研究認為,當克隆巴赫系數大于0.7時,可認為情景試驗設計之間的一致性良好。本次情景試驗的克隆巴赫系數為0.862,表明所設計的情景試驗是可靠的。
5 結束語
1) 駕駛員的駕駛經驗會對安全車速的選擇產生影響,且不同影響因素對有無經驗的駕駛員的作用效果不同,其他影響因素情景對駕駛員安全車速的選擇具有消極影響,安全車速普遍低于標準情景的安全車速。
2) 駕駛經驗豐富的駕駛員在安全車速的選擇上更加集中,也更靠近計算安全車速,但缺乏駕駛經驗的駕駛員對安全車速的選擇更加離散。從統計數據看,道路線形以及天氣狀況對駕駛員安全車速的消極影響并不十分明顯,路側安全設施以及路面質量對無經驗駕駛員安全車速具有顯著的消極影響。
3) 調查問卷對駕駛員年齡的調查采用區段的方式,提高了調查效率,但由于年齡段與實際駕齡無法有效匹配,對后續的分析也產生了一定的影響。
4) 駕駛員對安全車速的感知與駕駛員在實際行駛過程中的心理行為有很大關系,通過調查問卷獲取的數據僅反映了駕駛員在理論環境下對安全車速的感知行為,還應對駕駛員在模擬環境或實際環境下的感知行為進一步研究。此外,本研究未綜合考慮駕駛車輛的性能、駕駛任務的緩急等影響因素對安全車速的選擇是否產生影響。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
汽車實用技術(2022年4期)2022-03-07 06:07:20
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
公民與法治(2016年4期)2016-05-17 04:09:26
專用汽車(2016年4期)2016-03-01 04:13:43