路域無關信息域對駕駛人注視行為的影響
2021-05-08 09:50:28沈一川
智能建筑與智慧城市 2021年4期
沈一川
(1.同濟大學建筑設計研究院(集團)有限公司;2.上海智慧交通安全駕駛工程技術研究中心)
1 引言
安全與效率在道路交通系統中深度耦合。駕駛人、車輛和道路交通環境構成了道路交通系統的三要素,道路用戶主觀安全感受與道路交通設施客觀行車條件的相互作用構成道路交通安全系統的“主—客觀安全性”[1],兩者的相互平衡是道路交通運行安全的基礎。駕駛人失誤作為引發道路交通事故的主要原因已被世界各國所公認,隨著車輛智能化交互內容的迅猛增多,智慧交通設施信息知識獲取數量的快速增加,駕駛人面對的車輛內外部駕駛環境呈多樣化、復雜化的變化趨勢,從而導致駕駛負荷過高、注意力分散和應對突發事件處理能力的下降。為實現道路交通系統的安全化功能,對駕駛行為的形成、駕駛行為與道路交通環境的關系進行分析、測試、建模、仿真和試驗的研究,對道路交通事故誘發原因的辨識、預防和控制極為重要。
由交通環境和自然環境共同構成的路域環境對交通安全的影響分為:
①自然環境本身沿線的變化對道路用戶心理的作用(吸引);
②道路交通基礎設施與自然環境的和諧性。
進一步論證:人有被外界環境吸引并獲取信息(文字、圖像等)的本能,圍繞駕駛人,由外部事物所承載的對駕駛人行為和感受產生影響且不屬于交通信息本身的信息區域范圍,即為無關信息域(Irrelevant Information Range,IIR),如:屬于自然環境范疇內的人文環境、道路周邊廣告標牌設施[2]、夜間路側閃爍的霓虹燈等等。這些無關信息域對駕駛本身并不產生直接交通行為,卻能夠通過一種或多種方式獲得駕駛人對文字、圖像、視頻、燈光等信息的被動提取、篩選與處理,在視覺任務層面導致駕駛人行為的變化。
目前,對駕駛人視覺指標的試驗研究采用各類眼動儀實現,一般分為接觸式、非接觸式和遙感式設備。考慮駕駛人視覺特征變化為出發點,對受試駕駛人注視點落點位置精度要求較高,基于與同濟大學交通運輸工程學院的產學研合作,通過接觸式眼動追蹤系統開展高速公路實車試驗研究,試驗設備見圖1,試驗里程約95.0km,并利用馬爾可夫鏈的注視轉移模型分析路域無關信息域對駕駛人造成的不同視覺轉移方式。
2 注視行為
眼動(eye movements)是視覺過程的直接反應,是可探測的視認活動中的即時加工過程,它受多種認知因素的影響,與眼球的運動與注意、預期、記憶、推理、閱讀等認知活動有密切關系。在車輛行進方向,兩眼所形成視野夾角的那一點稱為注視點。在結合過往研究對駕駛人視覺興趣區域劃分的基礎上,對本研究試驗駕駛人興趣區域進行合理劃分。

圖1 接觸式眼動追蹤系統
2.1 視點興趣區域劃分
駕駛人行車過程中,需要不斷地從周圍環境攝取信息,為自身定制相應駕駛行為策略提供客觀依據。駕駛人對外界信息的提取過程是一種選擇性注意方式,因此駕駛人的注意力并不會平均分配到各個注視目標上,而是最終動態聚集在幾個相關區域,即被稱為興趣區域。基于單個駕駛人注視點的分析無法準確提取駕駛人的視覺搜索規律,而通過劃分興趣區域則將研究對象由點及面,可以滿足研究人員的靈活需求,從而降低了提取駕駛人行車過程中注視轉移特性規律的難度。
2.1.1 過往研究劃分方法
過往研究對駕駛人興趣區域的劃分主要分為視野平面劃分方法和動態聚類法。
通過視野平面劃分法的主要有GeoffreyUnderwood等人對車外視野劃分的9個均等且互不重疊的駕駛區域[3];Bao Shan等人著重依據頭部偏移等方式劃分的7個區域(包括車內區域)[4];M.Fitch等人在100Car自然駕駛試驗中更為細致地將駕駛人興趣區域劃分為:左前、正前、右前、左窗、右窗、左后視鏡、右后視鏡、內后視鏡等區域[5]。
動態聚類劃分方法以長安大學袁偉[6]的研究為代表,將試驗獲得的駕駛人在主視區平面上的注視點坐標運用動態聚類法聚為6類,每一類分別表示不同的注視區域。計算得到的興趣區域包括了左后視鏡區域、主視區左側、中央主視區、主視區右側、右后視鏡區域以及車內儀表區域。
2.1.2 本研究興趣區域劃分
比對兩種劃分興趣區域的方法,各有其優勢,動態聚類法精確度及效率均較高,可以避免因研究者過于主觀的區域劃分導致研究結論與駕駛人真實的注視特性產生偏差;視野平面劃分法的優勢是可以基于研究者的特殊興趣及需求靈活地進行區域劃分,從而使研究結論更契合自身的現實需要。本研究有明確的路域視野界定,故擬采用視野平面法著重按照研究對象對興趣區域進行有效的劃分。無關信息域是本次試驗研究的客觀主體,在劃分時,將從屬于無關信息域的所有內容分為一類,便于找出駕駛人的視線在道路上與無關信息域之間轉換的規律。將常規駕駛操控車輛時需要關注的道路路面、周邊車輛分別分為一類,將左右后視鏡分為一類(避免掃視后視鏡行為對本次研究產生干擾),并將其他對本次研究不產生重要影響的區域歸為一類,具體的興趣區域劃分方式見圖2,數據標定軟件界面見圖3,各區域囊括的主要注視目標物見表1。
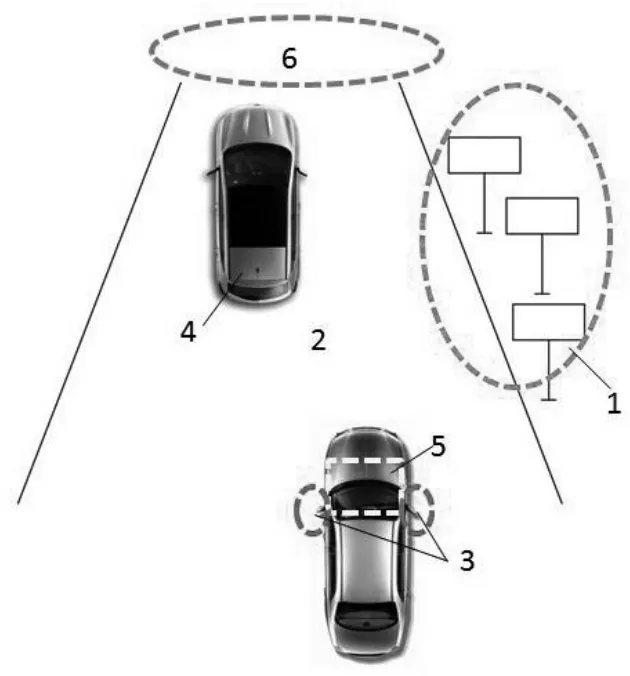
圖2 駕駛人注視點興趣區域劃分圖
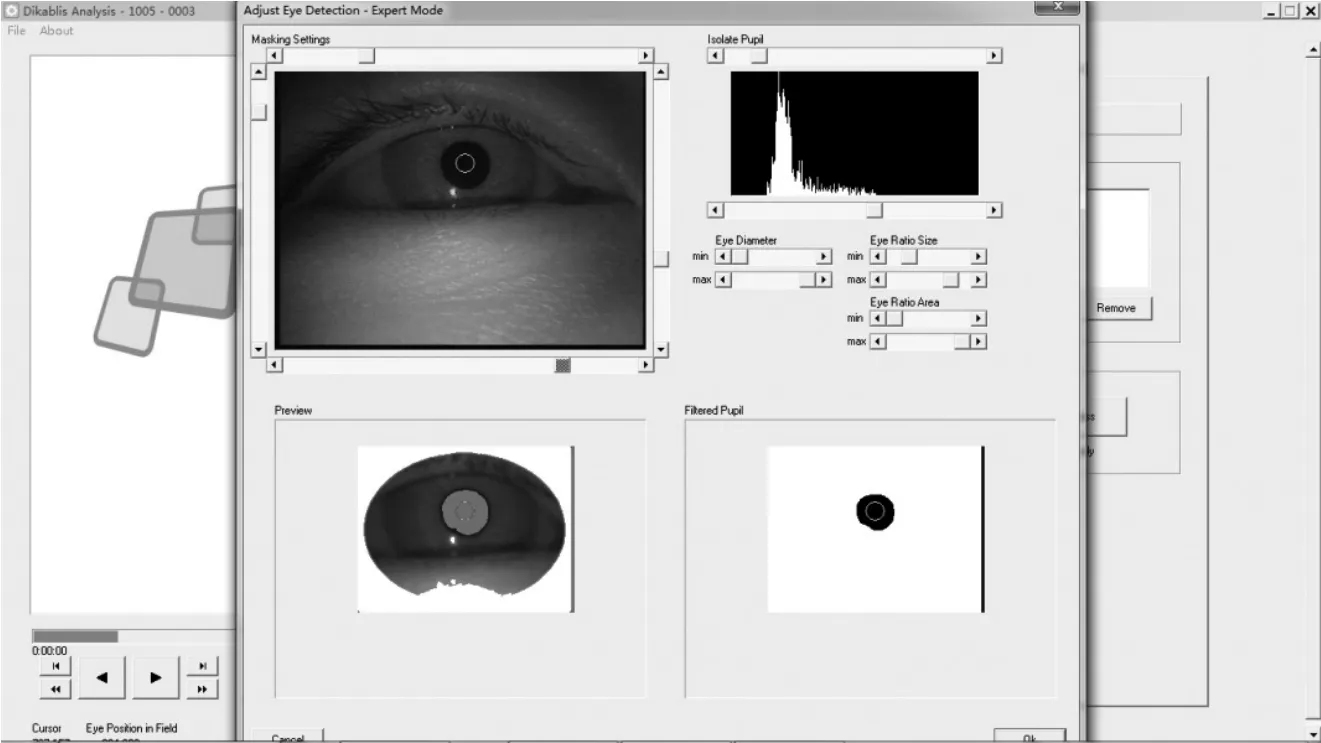
圖3 駕駛人注視點標定界面圖

表1 駕駛人注視區域劃分表
2.2 基于馬爾可夫鏈的注視轉移模式分析
2.2.1 馬爾可夫(Markov)鏈理論
在已知時刻tm系統所處狀態的條件下,tm時刻之后系統到達的狀態與tm以前系統所處的狀態無關,而完全取決于tm時刻系統所處的狀態,這種特性稱為無后效性,也稱為“馬爾可夫性”。
①馬爾可夫鏈:時間及狀態都是離散的馬爾可夫過程;
②連續時間的馬爾可夫鏈:時間連續、狀態離散的馬爾可夫過程;
③時間、狀態都連續的馬爾可夫過程。
馬爾可夫鏈在時刻m從任意一個狀態i(i∈I)出發,到時刻m+k轉移到狀態空間I中的某一狀態,轉移概率pij(m,m+k)稱為馬爾可夫鏈的k步轉移概率,記為轉移概率不依賴于時刻m的馬爾可夫鏈,稱為其次馬爾可夫鏈。如果馬爾可夫鏈具有有限狀態空間I={1,2,…,N},則k步轉移概率矩陣可表示為:
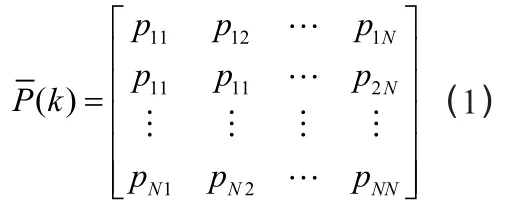
在該矩陣中,所有元素都是非負的,且每一行元素的和均為1。當k=1時,為一步馬爾可夫轉移概率矩陣;當時k=2,為兩步馬爾可夫轉移概率矩陣,且兩步馬爾可夫概率轉移矩陣等于一步馬爾可夫概率矩陣與自身相乘的乘積。
2.2.2 一步注視轉移概率矩陣
駕駛人視點駐留的不同興趣區域可以視為系統的不同狀態,同時下一個注視點駐留的區域只與當前區域相關,符合馬爾可夫鏈的典型特性[7]。將劃分的駕駛人注視區域看作馬爾可夫鏈的一種狀態,基于此狀態分別得到駕駛人注視點在各狀態間的轉移概率。
假定系統處于狀態i,aij為系統由狀態i轉向狀態j的頻數,n為狀態空間,ai為系統由狀態i轉向其他狀態的頻數之和,則系統由狀態i轉向狀態j的概率:

基于以上轉移概率計算方法,通過對試驗錄像篩選的駕駛人視點位置在各區域間的一步轉移概率矩陣(當駕駛人注視點連續落在某個區域時,并不考慮該區域內的轉移問題,即任意區域至其自身的轉移概率為0,且矩陣中任意行的轉移概率和等于1)。
利用MatLab軟件對本次試驗駕駛人視點進行一步轉移概率統計,首先對經過視頻判別的視點轉移區域列向量導入MatLab定義為矩陣A,對各區域間轉移次數求和后計入矩陣M,得到注視點一步轉移總數矩陣(見表2),軟件代碼如下:
M=zeros(6);%定義一個6行6列的0矩陣
n=size(A,1);%確定A矩陣大小
i=1;i0=1;
for i0=1:(n-1)
M(A(i,1),A(i+1,1))=M(A(i,1),A(i+1,1))+1;%將相應位置計數迭代至矩陣M
i=i+1;
end
進一步按照公式(2)計算得到對注視點的一步轉移概率矩陣,本研究統計分為對路段是否存在無關信息域兩個方面展開。
各階段注視點一步轉移概率矩陣如表3-表4所示。存在無關信息域路段注視點一步轉移概率圖如圖4所示。
對以上駕駛人注視點一步轉移概率矩陣進行分析,由于統計中認為注視點在某一區域內部轉移不記錄至一步轉移次數中,因此每個編號區域轉移至其本身的概率為0,而任意行的轉移概率和為1。

表2 駕駛人注視點一步轉移總數矩陣

表3 存在無關信息域(IIR)駕駛人注視點一步轉移概率矩陣

表4 不存在無關信息域(IIR)駕駛人注視點一步轉移概率矩陣

圖4 注視點一步轉移概率示意圖
由表可見,駕駛人注視點由區域1轉移至區域5的概率為0,即表示駕駛人視點從無關信息域(IIR)位置返回的過程中,視點立即落到車內儀表盤的概率為0,與此同時,區域3和區域5轉移至區域1的概率也為0,表示視點從左右兩后視鏡轉移至無關信息域(IIR)的概率為0。則可以推斷:駕駛人對無關信息域(IIR)的注視與對左右后視鏡和車內儀表盤的注視在絕大多數情況下并不發生在相鄰兩次注視點區域轉移的過程中,即駕駛人往往不會在一定時間段內,注視點始終轉移在前方道路視野以外。誠然,注視點保持在前方道路上是駕駛人對行駛前方各道路交通信息有效認知的必要非充分條件,一旦注視點轉移出前方道路行駛區域,就存在對道路突發情況認知的延遲,顯然駕駛人在潛意識中拒絕這樣的情況發生,即駕駛人保持注意力警覺能夠通過區域1同區域3和5相互轉移概率為0或基本接近于0來表現。反之,如果注視點在區域1與區域3和5的轉移發生在相領兩次視點轉移過程中,對正確認知當前道路交通環境安全是不利的。考慮到駕駛人對左右后視鏡和車內儀表盤的關注是對車輛本身和車輛周邊情況的正確判斷,在絕大多數情況下主導行車安全,由此可推得,區域1即無關信息域(IIR)的存在占用了駕駛人認知道路交通信息的視覺負荷。
對比表3和表4的駕駛人注視點一步轉移概率矩陣,表4所示不存在無關信息域路段注視點轉移進出編號1類概率為0。在驗證無關信息域的存在對駕駛人正確認知當前交通信息沒有幫助后,進一步驗證不存在無關信息域路段注視點轉移方式的不同:以編號2和編號4(即道路路面和車輛)為整體,駕駛人從該類區域由編號3、5轉進、轉出的概率都有所增加,可以認為駕駛人將存在無關信息域段對無關信息注視的這部分概率轉至其他幾類有助于認知道路交通信息的區域,可以反映出駕駛人注視點對道路本身集中程度提高了。
3 結語
隨著智能網聯汽車技術的不斷發展,有人—無人混合流駕駛場景對駕駛人各類操控行為提出更高要求。本研究提出路域無關信息域(IIR)的概念,劃分駕駛人視點興趣區域,引入馬爾科夫鏈理論研究注視點轉移模型,從動態視覺特征分析無關信息域對駕駛人行為的影響。
分析結果表明,考慮無關信息域的視覺轉移模型可以通過量化指標表示,駕駛人對路域無關信息域的注視與對車輛后視鏡及車內儀表盤的注視存在視覺轉移沖突,即無關信息域造成的駕駛分心。
未來仍有待進一步研究與論證的問題包括:對路域無關信息域就信息內容本身的再細分;考慮駕駛人分類特征(年齡、性別、駕齡等)的再細分;無關信息域與駕駛疲勞、其他駕駛任務負荷的相關性等。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32