基于模糊控制-擾動觀察法的光伏MPPT跟蹤技術
2021-05-07 10:37:16高仕紅馬紫琬董岳昆
電工材料 2021年2期
關鍵詞:模型
湯 洋,高仕紅,馬紫琬,陳 謙,黃 京,董岳昆
(湖北民族大學 信息工程學院,湖北恩施 445000)
引言
目前,國內外能源危機日益突出,光伏發電技術因其無污染、干凈等優點,成為國內外研究熱點之一[1]。而光伏電池是光伏發電技術不可缺少的模塊。如何保證光伏電池始終以最大功率點工作,對提高光伏發電效率、節約成本等具有重大意義。對此,國內外學者一直致力于研究光伏MPPT跟蹤技術。
常用的光伏MPPT跟蹤技術主要分為3種:恒定電壓法、導納增量法、擾動觀察法等[2-4]。其中,基于擾動觀察法的光伏MPPT跟蹤技術其輸出功率波動較大,工作效率低。導納增量法不受系統環境的影響,但其跟蹤效率低。恒定電壓法原理簡單,容易實現,但是其MPPT的跟蹤精度低。對此,很多學者致力于研究改進型算法和智能型算法[5-7]。有學者設計了可以在線擾動優化光伏MPPT的模糊控制器[8]。該控制方法利用模糊規則建立控制策略,具有一定的自適應性。此外,有學者將基于神經網絡算法應用到MPPT跟蹤技術中[9,10]。經網絡算法通過大量訓練樣本,使得P-V曲線的非線性特性問題得以解決,但是該方法需要大量數據,可靠性差。
本研究建立了光伏電池輸出功率的數學模型,并將擾動觀察法的簡潔性與模糊控制法的自適應性相結合,提出基于模糊控制-擾動觀察法的光伏MPPT跟蹤技術,來解決MPPT跟蹤精度低、自適應能力差的的問題。最后通過Matlab仿真軟件,驗證所提算法的可靠性。
1 光伏電池的數學模型
分析光伏電池的工作特建立數學模型,如圖1所示。獲取U-I間的關系,從而建立光伏電池輸出功率模型。

圖1 光伏電池等效電路模型
圖1中及式(1)中的符號說明見表1。

表1 光伏電池等效電路模型的符號說明
根據節點電流法,可以得到

根據式(1),求解可得光伏電池的輸出特性方程為:

實際上,參數Iph、Is、Rs、Rsh、A容易受外界因素的干擾,因此需要對光伏電池的輸出特性方程進行簡化。由于Rsh>>Rs,則有Iph≈Isc,UD≈U。對此,光伏電池的簡化數學模型可以表示為:

式中:Im為等效模型的最大輸出電流,A;Isc為等效模型的短路電流,A;Um為等效模型的最大輸出電壓,V;Uoc為等效模型的開路電壓,V。
C1、C2表示修正系數。根據簡化后的數學模型,求解光伏電池的輸出功率模型P,具體如下:

2 基于模糊控制-擾動觀察法的光伏MPPT跟蹤技術
2.1 建立模糊控制-擾動觀察法的仿真模型
利用仿真軟件,搭建模糊控制-擾動觀察法的模型,如圖2所示。
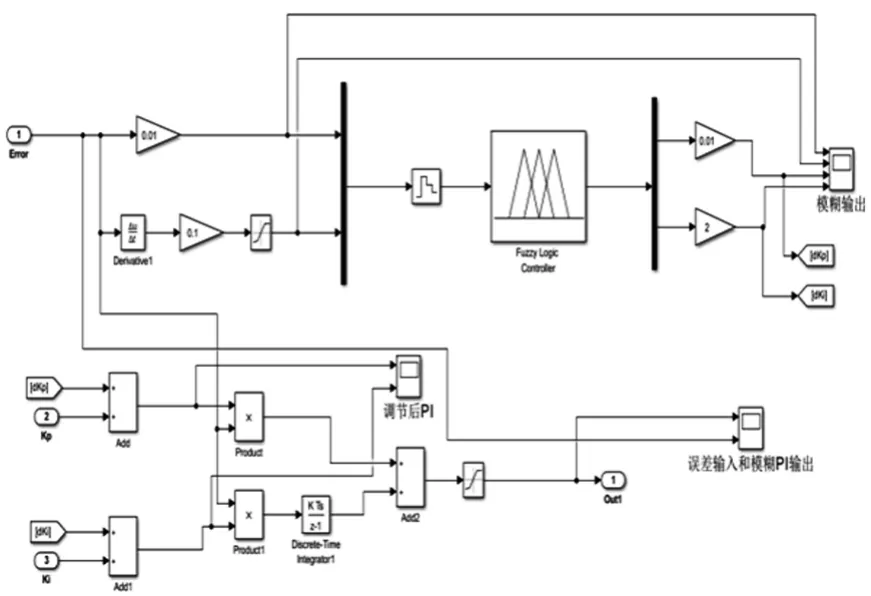
圖2 模糊控制-擾動觀察法的光伏MPPT模型
(1)確定光伏MPPT模型的輸入輸出。通過搭建的模型,確定輸入輸出。實際中,模糊邏輯控制器存在誤差,輸入量的誤差用e表示,誤差變化率用Δe表示,其對應的求解公式如公式(5):

模糊控制器的控制變量是通過Boost電路的占空比D來決定的。設置輸入量的誤差e和誤差變化率Δe的模糊論域為[-5,5],控制量均用7個模糊子集表示,具體如下:

(2)建立光伏MPPT模型的隸屬函數。根據光伏電池特點,選擇較為平緩的梯形三角函數的形狀作為MPPT模型的隸屬函數,具體如圖3所示。

圖3 隸屬度函數的形狀
(3)建立控制策略。
①當e>0,且Δe<0時,新步長增加不明顯。此時,應該利用小擾動跟蹤調節,通過降低電壓保證功率能夠向左移動;
②當e>0,且Δe<<0時,新步長為負值。此時,應該繼續保持大擾動跟蹤,通過降低電壓,保證功率能夠向左移動;
③當e>0,且Δe>>0時,新步長為正值,且增長明顯,應該繼續保持大擾動跟蹤,應該增加電壓,保證功率能夠向右移動;
④當e>0,且Δe>0時,新步長增加不明顯。此時,輸出值已接近最大功率點,通過采用小步長跟蹤調節,保證功率能夠向右移動;
⑤當e=0時,新步長不變化,輸出值即為最大功率時的電壓,不需要調節電壓。
3 PWM模塊及Boost變換器
3.1PWM模塊
PWM模塊的作用為:把MPPT控制模塊的輸出值轉換為輸入量。PWM模塊如圖4所示。
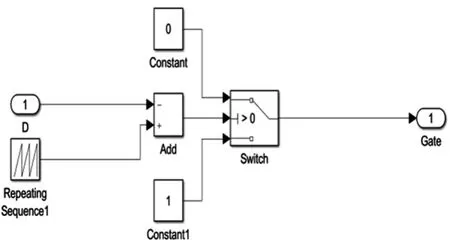
圖4 PWM模塊
3.2 Boost變換器
圖5為Boost變換器的仿真電路。其中,Vg表示輸入直流電源;U0表示輸出電壓。

圖5 Boost變換器的仿真模型
輸入電壓與輸出電壓間的關系為:

4 基于Matlab/Simulink的MPPT算法仿真比較
對所提出的跟蹤技術進行仿真,仿真模型如圖6所示。

圖6 仿真模型
為了驗證所提出的跟蹤技術的可靠性,對擾動法的光伏MPPT跟蹤技術進行了仿真。兩種跟蹤技術的實驗條件均相同。其中,光照強度:1 000 W/m2;環境溫度:25℃。設置兩種方法的仿真時間為0.4 s。圖7為兩種方法下的光伏MPPT模型的輸出電流對比圖;圖8為兩種方法下的光伏MPPT模型的輸出電壓對比圖。
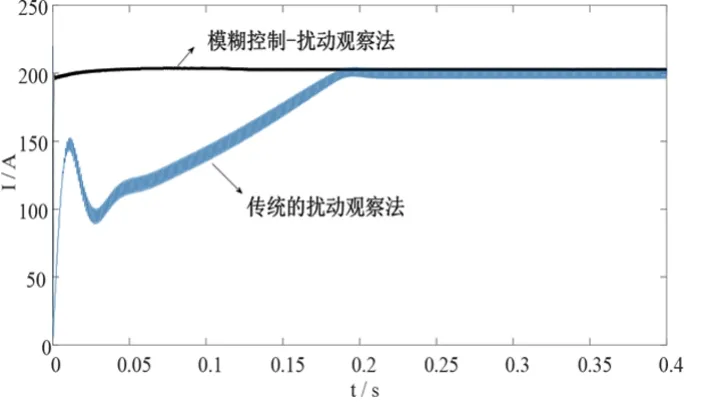
圖7 光伏電池輸出電流對比圖

圖8 光伏電池輸出電壓對比圖
從仿真結果可知,采用傳統的擾動觀察法,輸出的電流、電壓的振蕩幅度較大,此方法受振蕩的影響;采用模糊控制-擾動觀察法的MPPT控制方法輸出的電壓、電流基本上不受振蕩的影響。
通過建立的數學模型,采用上述兩種方法進行仿真,將兩種方法進行對比,如圖9所示。

圖9 光伏電池輸出功率對比圖
采用傳統的擾動觀察法需要經過0.2 s,才使得光伏MPPT模型的輸出功率趨于穩定,穩定后的輸出功率波動范圍為[5.4×104,6.5×104](單位為W),而且此方法的輸出功率振蕩特征明顯;而采用模糊控制-擾動觀察法的MPPT控制方法僅需0.592×10-3s,就能保證光伏MPPT模型的輸出功率趨于穩定,穩定后的輸出功率波動范圍為[5.983×104,5.997×104](單位為W)而且此方法的輸出功率基本上不受振蕩的影響,極大地縮小了搜索到最大功率點附近的跟蹤時間,具有更好的自適應性。
5 結論
研究所提出的算法跟蹤精度高,能準確跟蹤點MPPT,受振蕩的影響較小,且自適應能力強,提升系統的運行效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19