三相直接矩陣變換器模糊滯環控制策略*
2021-04-29 03:31:12張建偉王佳宇
電氣工程學報 2021年1期
張建偉 王佳宇
(1.內蒙古自治區電能變換傳輸與控制重點實驗室 呼和浩特 010080;2.內蒙古工業大學電力學院 呼和浩特 010080)
1 引言
作為間接AC/DC/AC 變換器的有效替代方案,矩陣變換器具有以下“綠色”變頻器的特點:①輸入輸出電流波形正弦;② 輸入功率因數可控并且可控制到單位功率因數;③能量可以雙向流動(四象限運行);④ 輸出電壓和頻率可大范圍自由調節;⑤ 電路簡單且體積小,容易維護[1-2]。近年來涌現了大量有關矩陣變換器的相關研究,從各種角度證實了矩陣變換器的優越性能[3-6]。
有效的控制方法是實現矩陣變換器優越性能的重要條件。針對矩陣變換器的控制方法存在大量的研究[7-11]。很多有關矩陣變換器控制的研究都是以輸出電壓的調制為控制目標,如廣泛使用的空間矢量調制(Space vector modulation,SVM)等。另外由于矩陣變換器中的開關數量眾多,對應的開關狀態也較多,因此開關函數的計算比較復雜,計算量也比較大,調制復雜是眾多矩陣變換器的控制方法普遍存在的問題。
滯環電流控制是使用較為廣泛的一種電流控制方法,具有響應速度快、不需要調制環節、結構簡單且自帶限流功能等優點[12-15]。滯環控制在逆變器上得到了廣泛的研究與應用,但是有關矩陣變換器的滯環控制的研究還較少。
文獻[16]將直接矩陣變換器的控制分為虛擬整流器和虛擬逆變器的控制,虛擬整流器采用的是相控方式,虛擬逆變側采用的是滯環控制方法。這種控制方法并不是采用滯環控制方法直接對矩陣變換器進行控制。文獻[17]利用滯環控制策略對使用矩陣變換器的永磁同步發電機進行控制。該文獻只利用了矩陣變換器輸入電壓的最大值和最小值,因此是二位式滯環控制器,并且滯環寬度固定。文獻[18-19]對矩陣變換器的滯環控制策略開展了仿真和試驗研究。其控制方法與文獻[17]中的類似,只利用了輸入電壓的最大值和最小值,屬于二位式的滯環控制器。ZHANG 等[12,20]對矩陣變換器的滯環控制進行了詳細說明,研究了固定環寬和正弦環寬的滯環控制策略,但也并未對三位式的滯環控制和變環寬滯環控制策略進行研究。
滯環控制器結構簡單,不需要調制環節并且可直接控制矩陣變換器的輸出電流,因此在矩陣變換器的控制中具有重要的研究意義與實用價值。考慮到上述問題,本文針對三相直接矩陣變換器的輸出電流的控制,在二位式滯環控制器的基礎上設計了三位式的電流滯環控制器。三位式的滯環控制器將輸入電壓分為最大、中間與最小,從而提高了控制的靈活性與準確性。考慮到固定環寬帶來的問題,本文提出一種基于模糊控制器的在線調整滯環寬度的方法來提高控制器的性能。
2 矩陣變換器
三相直接矩陣變換器的主電路如圖1 所示。矩陣變換器主要由九組雙向開關元件(S1~S9)構成,每組雙向開關由兩個帶有反并聯二極管的半導體開關器件(如IGBT)組成,通過雙向開關器件任一相負載可以和三相電源的任何一相連接。根據特定規則控制九個開關元件的導通和關斷,可控制矩陣變換器的輸出電壓和輸入電流,即
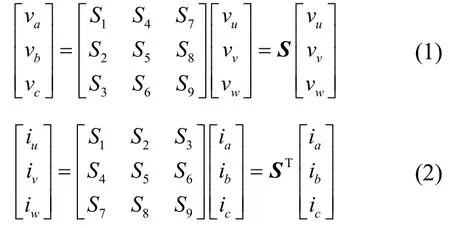
式中,S是開關傳遞函數,ST是S的轉置。Si(i=1,2,3,…,9)的值為1 時,對應的開關導通,為0時則關斷。通過控制開關傳遞函數,即開關S1~S9的狀態即可實現對矩陣變換器的控制。為了避免輸入電壓源的短路而引起的過電流和輸出感性負載開路而引起的過電壓,往往需要添加開關約束條件,即(S1+S4+S7=1,S2+S5+S8=1,S3+S6+S9=1)。

圖1 三相直接矩陣變換器的主電路結構圖
3 矩陣變換器的滯環控制
3.1 二位式滯環控制
利用滯環控制器可以確定矩陣變換器中的開關狀態,從而實現對矩陣變換器輸出電流的控制。考慮輸出中的一相,矩陣變換器的二位式的滯環控制器的控制規則可以表示為

式中,Irefsin(ωref t+θref)=ia*為給定的參考電流;ia是測量的負載電流;h表示滯環寬度,環寬上、下限為[ilower iupper]。max/min(vA,vB,vC)選取當前時刻(vA,vB,vC)中值最大/最小的電壓。該控制邏輯可以表述為當實際的電流超過上邊界時,應該選擇輸入電壓中最大的電壓施加到該相的輸出從而使該相的輸出電流增加;當實際電流低于下邊界時,應該選擇輸入電壓中最小的電壓施加到該相的輸出從而使該相的輸出電流減小。由此得到的控制結構框圖如圖2 所示。
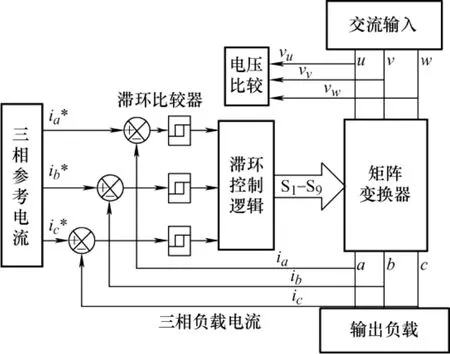
圖2 二位式滯環控制系統結構圖
3.2 三位式滯環控制
上述即為二位式的滯環控制,其中只用到了當前時刻最大或最小的電壓。由于矩陣變換器的輸出是三相,因此可以在二位式滯環控制的基礎上設計三位式的滯環控制使電壓的選擇變為三種,以此來增加控制的靈活性與準確性。
三位式滯環控制器的輸出,有-1、0、1 三種狀態。與二位式的滯環控制相比增加了0 狀態的輸出,通過該狀態選擇三相輸入中處于中間位置的電壓。三位式的滯環控制器是在二位式的基礎上改進的,該控制器可以看作兩個二位滯環控制器的結合[13]。三位式滯環控制器的輸入輸出關系為
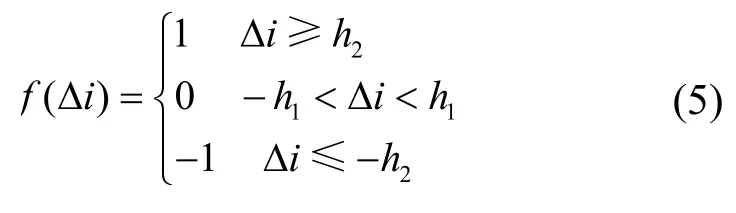
當輸入Δi介于[-h2,-h1]和[h1,h2]時,f(Δi)輸出保持前一個狀態的值,這與二位式滯環控制器區間[-h/2,h/2]中的情況是一致的。式(5)中,Δi=ia*-ia為三位式滯環比較器的輸入,f(Δi)為輸出,h1和h2為兩個滯環控制的滯環寬度。三位式滯環控制器的傳輸特性如圖3 所示。
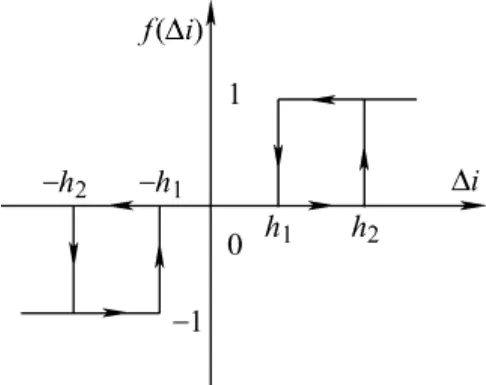
圖3 三位式滯環控制器輸入輸出關系圖
4 基于模糊控制的變環寬滯環控制
滯環寬度是影響控制效果的關鍵因素。以上二位式和三位式的滯環控制中的滯環寬度都是固定的。定環寬滯環控制方法具有動態響應速度快、魯棒性好的特點,但是由于環寬固定,不能隨系統運行情況進行調整,所以定環寬滯環控制方法的控制精度、開環器件的開關頻率以及THD 值受環寬影響較大,從而不能精準地實現逆變器輸出電流的控制。如果環寬選取得偏小,控制效果與精度較好,但是開關器件的開關頻率較高,開關損耗也會較高。如果環寬選取的偏大,開關頻率和損耗會降低,但是控制效果和精度會隨之下降。針對上述問題,本文基于模糊控制器來設計滯環控制器,使滯環寬度能夠隨著系統工作狀況的改變而在線調整。
模糊控制是一種非線性控制方法,并且不需要系統的模型。模糊控制中輸入量的數量稱為模糊控制器的維數。模糊控制器的維數越高,系統控制的效果就越好,但是控制器的復雜程度和實現難度也越大。模糊控制器的維數較低時,控制雖然實現較為容易,但控制效果也較差[21]。
本文用給定參考電流和輸出電流的差值來控制滯環控制器的帶寬。將偏差電流Δi劃分為5 個模糊子空間,語言值分別為:負大(NB)、負小(NS)、零(Z)、正小(PS)、正大(PB)。將滯環寬度hf劃分為3個模糊子空間,語言值分別為:零(Z)、正小(PS)、正大(PB)。則有
偏差電流Δi基本論域為[-1,1],滯環寬度hf基本論域為[0,0.5]。為確保模糊控制器具有較高的靈敏度,在基本論域邊界處,各變量的隸屬函數選擇梯形函數,偏差電流的中間隸屬函數選擇靈敏度較高的三角形函數。Δi與hf的隸屬度函數如圖4所示。
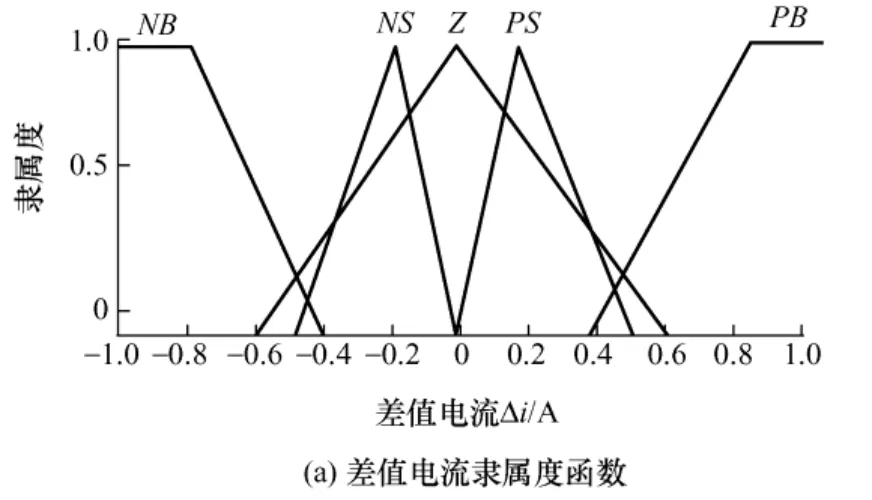

圖4 隸屬度函數
設計一維輸入一維輸出的模糊控制器,輸入變量有5 個模糊語言子集,輸出變量有3 個模糊語言子集,一共有5 條模糊控制規則,模糊控制規則如表1 所示。這樣可以根據系統的運行狀態在線調整滯環寬度,基于模糊控制的滯環控制器結構示意圖如圖5 所示。

表1 模糊控制規則表

圖5 基于模糊控制的變環寬滯環控制
5 仿真分析
為了驗證所提方法的正確性和有效性,在Matlab/Simulink 仿真環境中搭建模型進行仿真分析。仿真參數設置如下:電源電壓有效值為220 V,頻率為50 Hz,負載為阻感負載,電阻值為10 Ω,電感值為30 mH,固定環寬滯環控制器中的環寬為0.02,采樣時間為50 μs。
如圖6 所示為矩陣變換器的二位式滯環控制的仿真結果。仿真中,輸出參考電流的幅值為15 A,頻率為50 Hz。圖6a 為矩陣變換器的輸出電流波形,可以看出二位式滯環控制器可控制矩陣變換器的輸出電流并很好地跟蹤參考電流。對應的諧波分析如圖6b 所示,總諧波失真率THD 僅為1.75%,說明輸出電流的波形較好。對應輸出的線電壓如圖6c 所示,該波形由基波為50 Hz 的一系列的電壓脈沖波形構成。

圖6 二位式滯環控制器的仿真結果
三位式滯環控制的仿真結果如圖 7 所示。h1=0.005,h2=0.01,其他系統參數與工況與前面二位式滯環控制器中的相同。由于在滯環控制器中增加了一種狀態,對應的電壓選擇也增加了一種,因此控制的靈活性和準確性隨之增加。通過對比圖6 與圖7 中的仿真結果,可以看出三位式的滯環控制器能夠很好地控制矩陣變換器的輸出追蹤參考電流。而且與二位式的滯環控制相比,三位式滯環控制中的總諧波失真率THD 有所下降,變為1.28%。從電壓波形上對比可以看出,三位式與二位式的滯環控制在開關頻率上的差別并不大。
以上的二位式和三位式的滯環控制器中的環寬都是固定不變的。當系統運行狀態改變時,固定的滯環寬度往往不能獲得滿意的控制效果。如果滯環寬度相對于參考電流太小,雖然電流波形比較好,但是將會導致過高的開關頻率和開關損耗,過高的開關頻率對半導體開關器件也是一個極大的挑戰。反之如果滯環寬度占參考電流的比重過大,雖然開關頻率和損耗會大幅下降,但是電流的波形就難以滿足要求了。因而滯環寬度隨著運行工況的改變而調整具有重要意義。
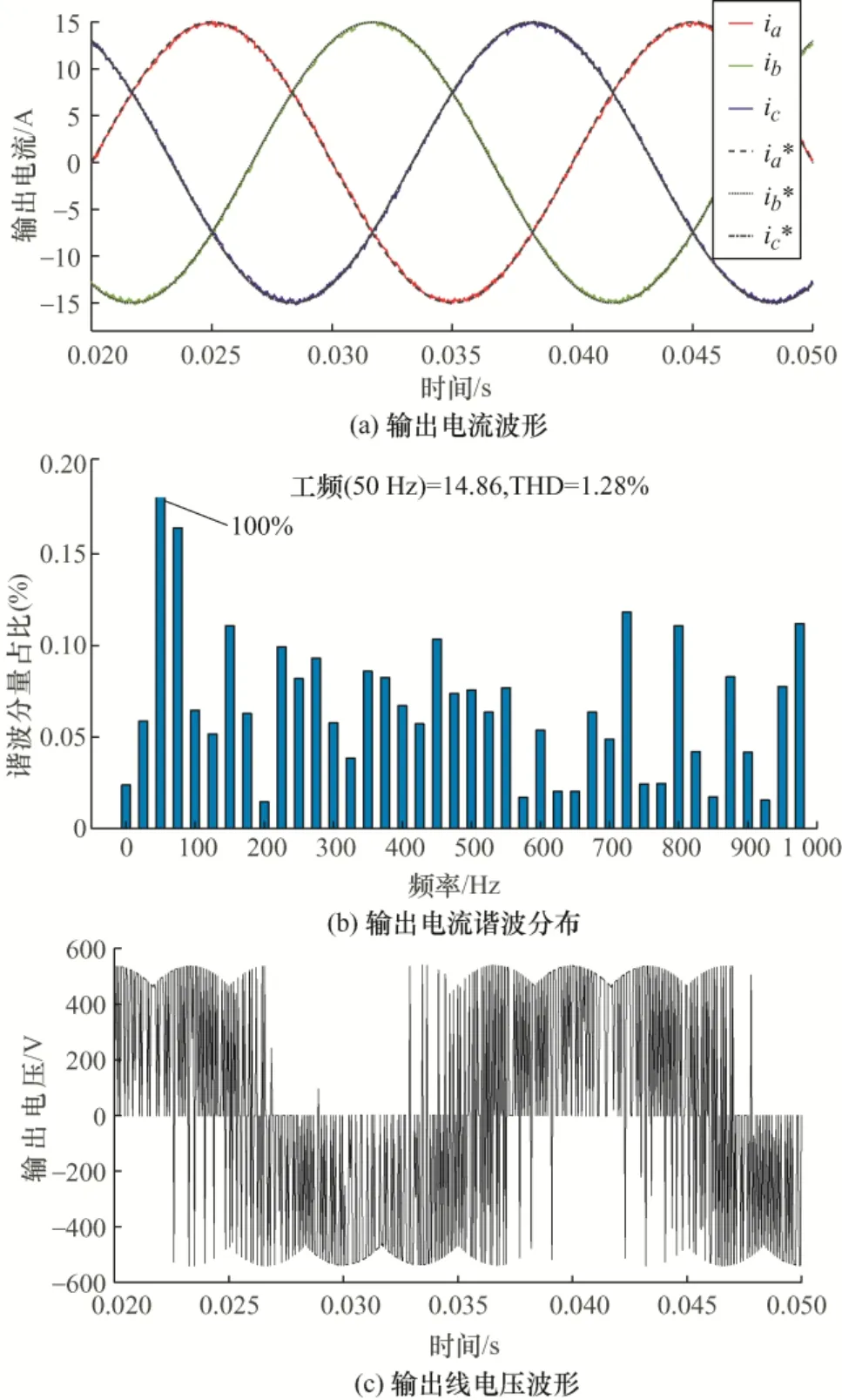
圖7 三位式滯環控制器的仿真結果
基于模糊控制的滯環控制器可以根據系統的運行狀況按照設計的模糊控制規則在線調制滯環寬度,相比固定環寬的滯環控制具有更好的適用性。基于模糊控制的變環寬滯環控制的仿真結果如圖8 所示。圖8a 所示為由模糊控制得到的滯環寬度,在實施三位式的滯環控制時,h1=hf/2,h2=hf。由圖8b 和圖8c 可以看出,基于模糊控制的變環寬滯環控制能夠較好地控制矩陣變換器的輸出電流。通過對比圖6c 和圖7c、圖8d 可以看出,該方法中的開關頻率要明顯低于前面所述的固定環寬的滯環控制。
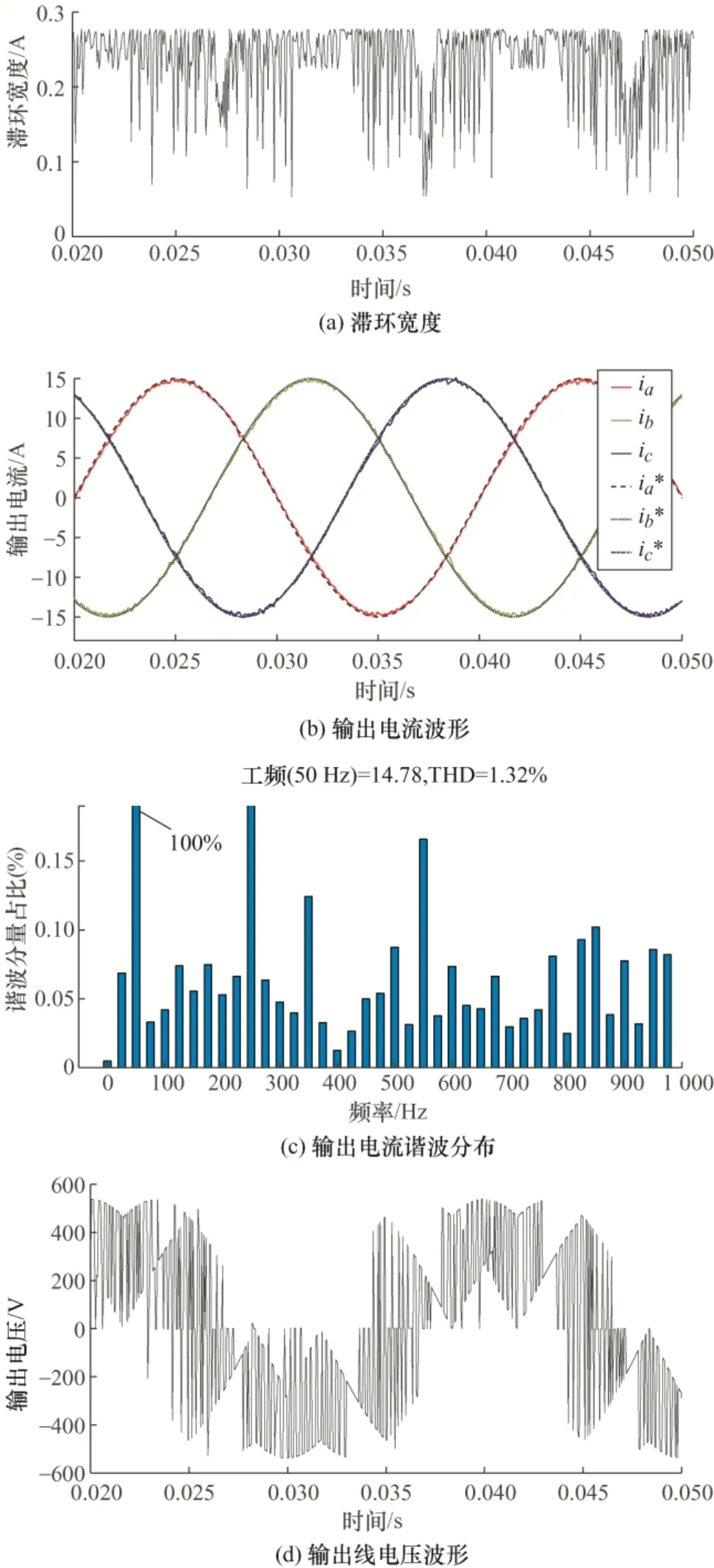
圖8 基于模糊控制的變環寬滯環控制器的仿真結果
6 結論
滯環控制器具有結構簡單、動態響應快、魯棒性好而且自帶限流功能等優點。但是有關矩陣變換器的滯環控制策略的研究還較少。本文針對三相直接矩陣變換器設計了滯環電流控制策略。研究結果表明二位式與三位式的滯環控制器均能夠較好地控制矩陣變換器的輸出電流。對比來看,三位式的滯環控制器比二位式的滯環控制器具有更好的靈活性與準確性。但是這兩種方法中的滯環寬度不能跟隨系統的變化而改變,因此當系統工況改變時,控制效果將受到較大的影響。針對以上問題,本文基于模糊控制研究了矩陣變換器的變環寬滯環控制策略,該方法中的滯環寬度能夠跟隨系統的運行情況在線調整,仿真結果表明模糊滯環控制方法可以有效地控制矩陣變換器的輸出電流,并且具有更廣泛的適用性。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
兒童故事畫報(2019年5期)2019-05-26 14:26:14
消費導刊(2018年10期)2018-08-20 02:57:02
意林原創版(2016年10期)2016-11-25 10:28:30
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12