城市軌道交通再生能量利用的直流牽引供電系統仿真研究*
2021-04-29 03:31:42肖梓林
電氣工程學報 2021年1期
肖梓林
(中鐵第一勘察設計院集團有限公司 西安 710043)
1 引言
隨著城市化進程的不斷深入,行車難、乘車難的問題,不僅成為影響市民出行的主要因素,還制約著城市的經濟發展[1]。針對這一現象,各國加速了立體化軌道交通的建設速度,用來解決日益嚴重的城市交通問題。常見的城市軌道交通工具有地鐵、輕軌、有軌電車及磁懸浮列車等,此類交通工具的使用為人們的生活提供了大量的便利條件,同時也帶來了相應的能量問題。隨著復合能量技術的不斷發展,儲能技術的應用范圍逐步增加。將復合能量技術應用于城市軌道交通工具已成為解決能量問題的主要手段。為有效控制優化后的直流牽引供電系統,常采用系統仿真的形式獲取系統的使用性能。但傳統的直流牽引供電系統潮流分布仿真方法[2]對于儲能單元的仿真效果較差,因而本文提出城市軌道交通再生能量利用的直流牽引供電系統仿真方法。在此方法設計完成后,將設定應用測試環境對設計結果展開相應的測試,以保證測試結果的可靠性。
2 城市軌道交通再生能量利用的直流牽引供電系統仿真
針對原有直流牽引供電系統仿真過程中,對儲能單元仿真效果不佳,造成直流牽引供電系統仿真效果較差的問題,此次仿真方法設計中,將設定單獨的儲能單元仿真環節,實現控制能量利用的直流牽引供電系統仿真目標。具體仿真架構如圖1 所示。通過圖1 所示的架構,完成系統仿真過程。此次仿真過程涉及大量的運算,為提升仿真結果的可靠性,將計算結果統一保留小數點后兩位。
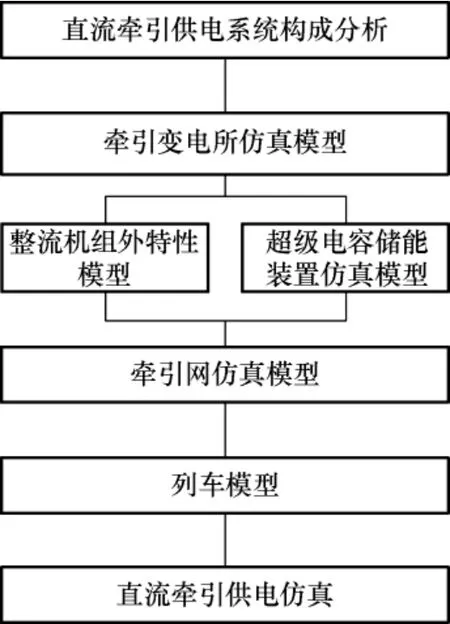
圖1 直流牽引供電系統仿真架構
2.1 構建儲能單元仿真分析
為保證交通再生能量利用的有效性,在車輛中增加儲能單元,實現對車輛中可再生能量的控制。在此次研究中,將儲能單元設定為超級電容儲能設備,此設備具有三種模式,即充電模式、放電模式以及待機模式[3-4],僅對其放電與充電模式進行仿真分析。
當車輛制動時,車輛再生制動能量上傳至車輛的牽引網上,引起牽引網網壓抬升,儲能單元檢測到起動電壓低于牽引網電壓,且車輛機組無輸入電壓,儲能單元呈充電模式。同理可知,當車輛牽引時,車輛從牽引網中獲取電力資源,牽引網網壓下降,儲能單元檢測到放電電壓高于牽引網電壓,且車輛機組有輸出電壓,儲能單元處于放電模式。雙向DC/DC 變換器充電與放電工作模式如圖2 所示。
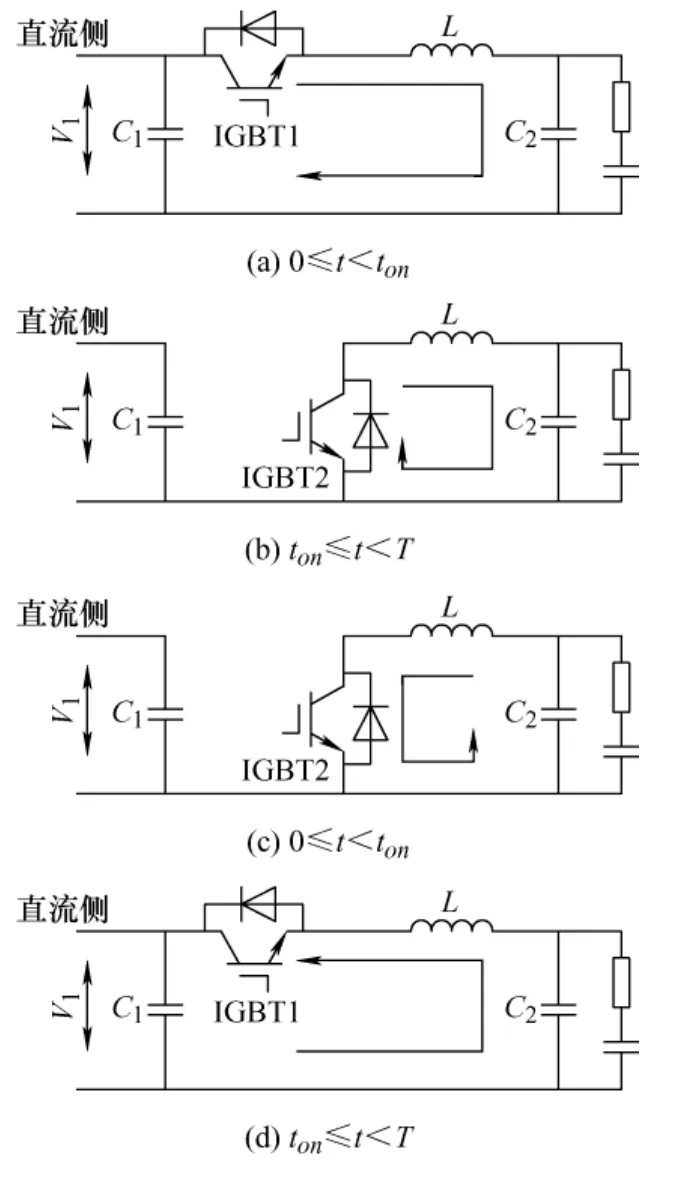
圖2 雙向DC/DC 變換器充電與放電工作模式
圖2 中,圖2a、圖2b 為雙向DC/DC 變換器充電工作模式,圖2c、圖2d 為雙向DC/DC 變換器放電工作模式。根據Buck 工作模式原理[5],當充電時,IGBT1 工作,電流流向儲能單元,在t<ton時段IGBT1開始充電,ton≤t時段IGBT1 充電完成,二極管續流。當放電時,IGBT2 工作,電流由儲能單元流向直流側,在t<ton時段IGBT2 導通,電容L有電流生成,ton≤t時段IGBT2 電流生成結束,二極管續流,電流流向直流側。儲能單元的仿真重點在于雙向DC/DC 變換器的控制過程,此系統中的控制策略主要采用電流電壓雙閉環控制,提升系統的動態響應,有效保證儲能單元的正常使用,增強系統的穩定性。
2.2 車輛直流牽引計算
為獲取在行進過程中,不同時刻、不同地點車輛的去留信息,需要展開相應的車輛直流牽引計算。通過對車輛的信息模塊、路線管理模塊以及控制模塊的模擬,可對單一車輛在指定線路中的運行情況進行分析,包括時間、速度、位置、取流情況等信息[6-7]。在計算的過程中,需要注意以下幾點:首先,在行進線路的研究中,由于站點之間的距離較短,在計算時務必注意精確度;其次,路線中如途經大型建筑物,則剔除建筑物的影響;最后,牽引的計算結果將作為直流牽引供電系統仿真中的計算基礎。為提升此次設計中車輛直流牽引計算的有效性,設定牽引網等效模型如圖3 所示。
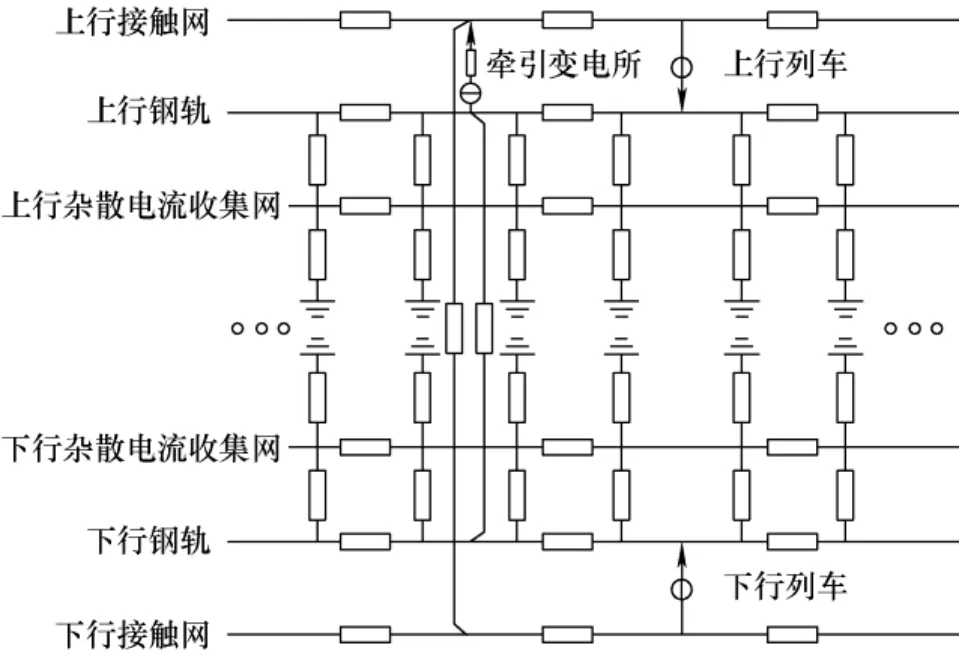
圖3 牽引網等效模型
根據牽引網的實際結構,在等效模型中,設定上行與下行兩組支路,并對支路中的電阻進行控制。通過上述牽引網等效模型展開車輛直流牽引計算。已知車輛在運行狀態中可分為三種狀態,分別為牽引運行、惰行以及制動運行[8-9]。根據以上三種狀態,將車輛的單位合力表示為
式中,a1為牽引運行合力;a2為惰行合力;a3為制動運行合力。其中,a為單位合力;e為單位牽引力;re為單位阻力;d為行駛距離。將此式與原有仿真方法中的直流牽引計算公式相結合,并設定相應速度內的牽引力與阻力為恒定數值,采用車輛的速度變化計算車輛的運行時間與距離[10-12]。將上述公式與原有計算公式相結合,可得出車輛的合力做功的表達式為

式中,g為車輛行駛中的合力;v為行駛速度;s為行駛中的變量參數;t為行駛時間。通過此公式可得出車輛行駛速度與行駛距離,計算式為

式中,vi+1、di1+分別表示車輛在行駛至第i+1 個路段時,車輛的實時速度與行駛距離;vi、di分別表示車輛在行駛至第i個路段時,車輛的行駛速度與行駛距離;l表示積分計算設定步長[13-15]。通過此公式對車輛直流牽引力展開計算,并保證計算精度與計算速度,則車輛直流牽引力的計算式為
2.3 直流牽引供電系統仿真算法
設計直流牽引供電系統仿真算法,此次算法設計建立在直流牽引供電系統分析結果的基礎上,設定供電系統分析流程如圖4 所示。
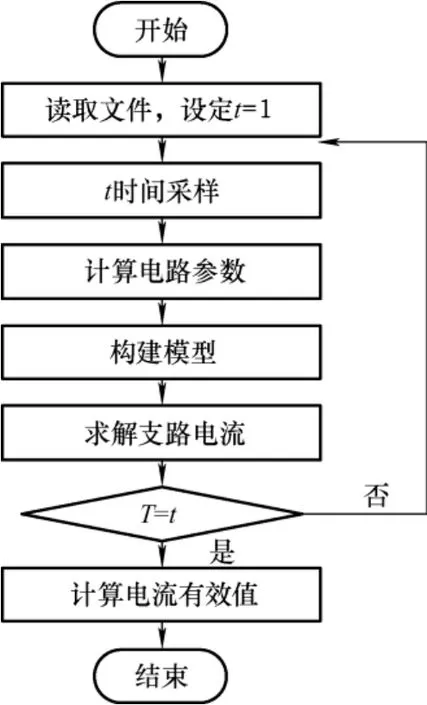
圖4 供電系統分析流程圖
通過圖4 流程,獲取供電系統分析結果,并采用其此次研究所需的仿真算法。將此供電系統直流化處理后,構建系統導納矩陣K,并確定構建的矩陣具有稀疏性,通過此設定提高文中設計方法的計算速度。
直流牽引供電系統中采用電氣潮流計算中的節點電壓法,結合高斯消去法獲取系統各節點的電壓,具體公式如下

式中,U為系統電壓;I為系統電流。直流牽引供電系統仿真通過設定戴維南電路實現系統等效處理。將此公式結合原有仿真方法中的系統仿真算法,即可得出直流牽引供電系統中的有效電流及平均功率,具體公式如下
式中,I為有效電流;P為平均電壓;T為運行周期;t為運行時間;u為運行電壓;i為運行電流。
將上述設計結果與傳統仿真方法相結合,以此完成供電系統仿真工作。至此,城市軌道交通再生能量利用的直流牽引供電系統仿真方法設計完成。
3 仿真方法應用分析
通過上述設計,完成城市軌道交通再生能量利用的直流牽引供電系統仿真過程,為保證文中設計的仿真過程具有科學性,構建仿真方法應用環節展開分析。
3.1 測試設定
在此次測試中,采用文中設計的城市軌道交通再生能量利用的直流牽引供電系統仿真方法和文獻[2]直流牽引供電系統潮流分布仿真方法與實測結果對比的形式,獲取文中設計方法的仿真效果。為保證測試過程的有效性,設定車輛行駛城市的某條線路,并對此次行程過程展開仿真分析。
此次測試中的行駛線路以西安市地鐵8 號線為研究對象。如圖5 所示,西安市地鐵8 號線為環路,與其他線路具有部分共線,共設37 座車站,其中換乘站18 座,最大站間距2 529 m,全長約49.896 km,在此線路中途經4 座牽引變電站,2 個停車場,最高車速80 km/h。采用城市軌道交通再生能量利用的直流牽引供電系統仿真方法(本文方法)與直流牽引供電系統潮流分布仿真方法(文獻[2]方法)對此車輛系統展開仿真,并與實測結果進行對比,為保證實測結果的精準度,設定測量設備技術參數如表1 所示。采用表1 設備,實現測試過程,并與仿真結果進行對比,從而獲取仿真方法的使用效果。
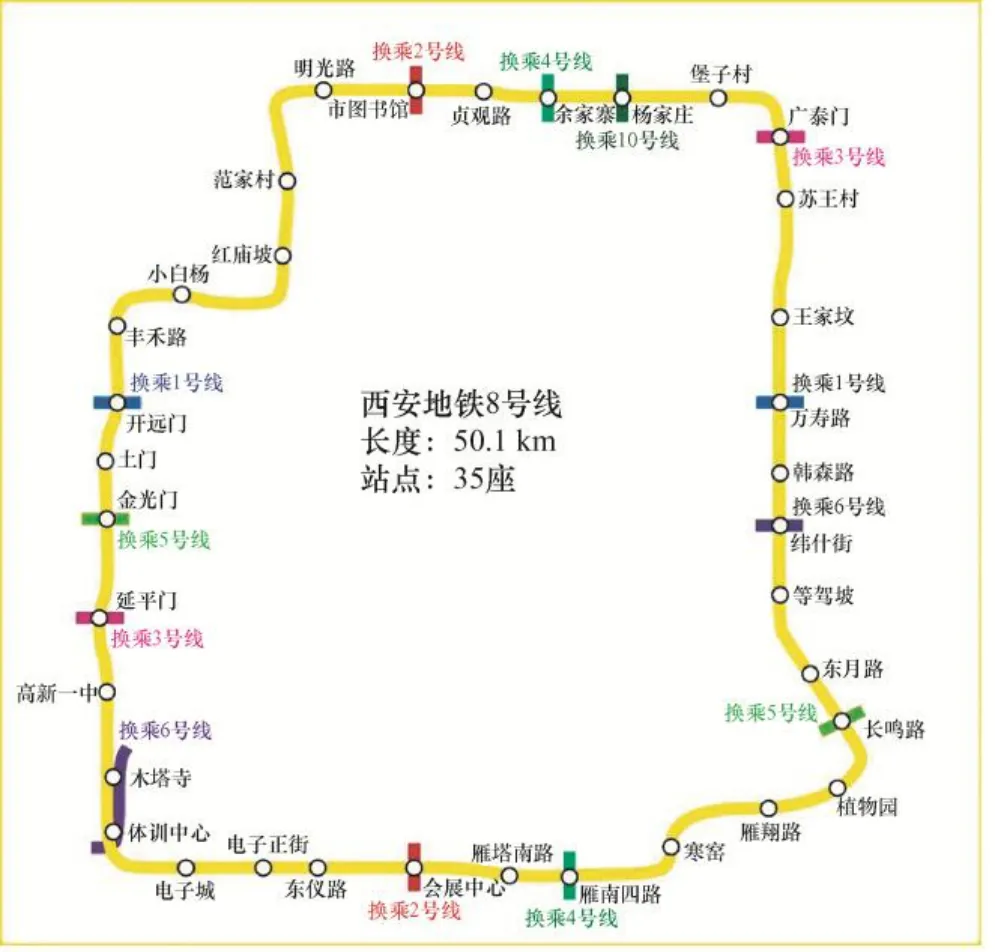
圖5 西安市地鐵8 號線運行圖
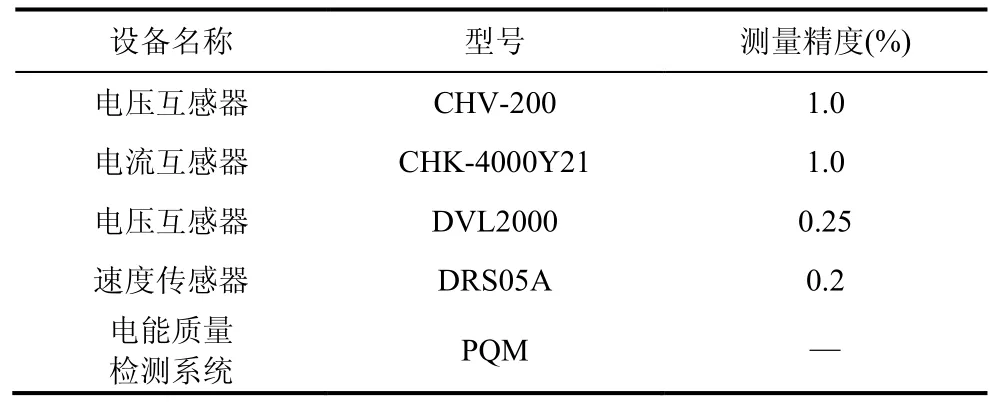
表1 測量設備技術參數
3.2 測試指標
在此次測試中,將測試指標設定為電流動態分布與再生能量回饋兩方面。通過這兩個指標,對仿真方法的仿真效果展開分析。在系統仿真過程中,具有多種數據指標,但通過研究發現,此兩種指標具有表征性,因而選用上述兩種指標完成測試。
3.3 電流動態分布測試結果
根據以往研究可知,電流變化圖像呈動態形式,通過對比驗證仿真方法的仿真精度。通過圖6 可知,文中設計方法的車輛電流走向與實際的車輛電流走向一致,且波動的峰值大致相同,僅在波動的波谷區域出現較小的誤差;而傳統方法的仿真結果與實測結果相差較大。由此可知,文中設計方法使用效果較好,傳統方法的使用效果較差。
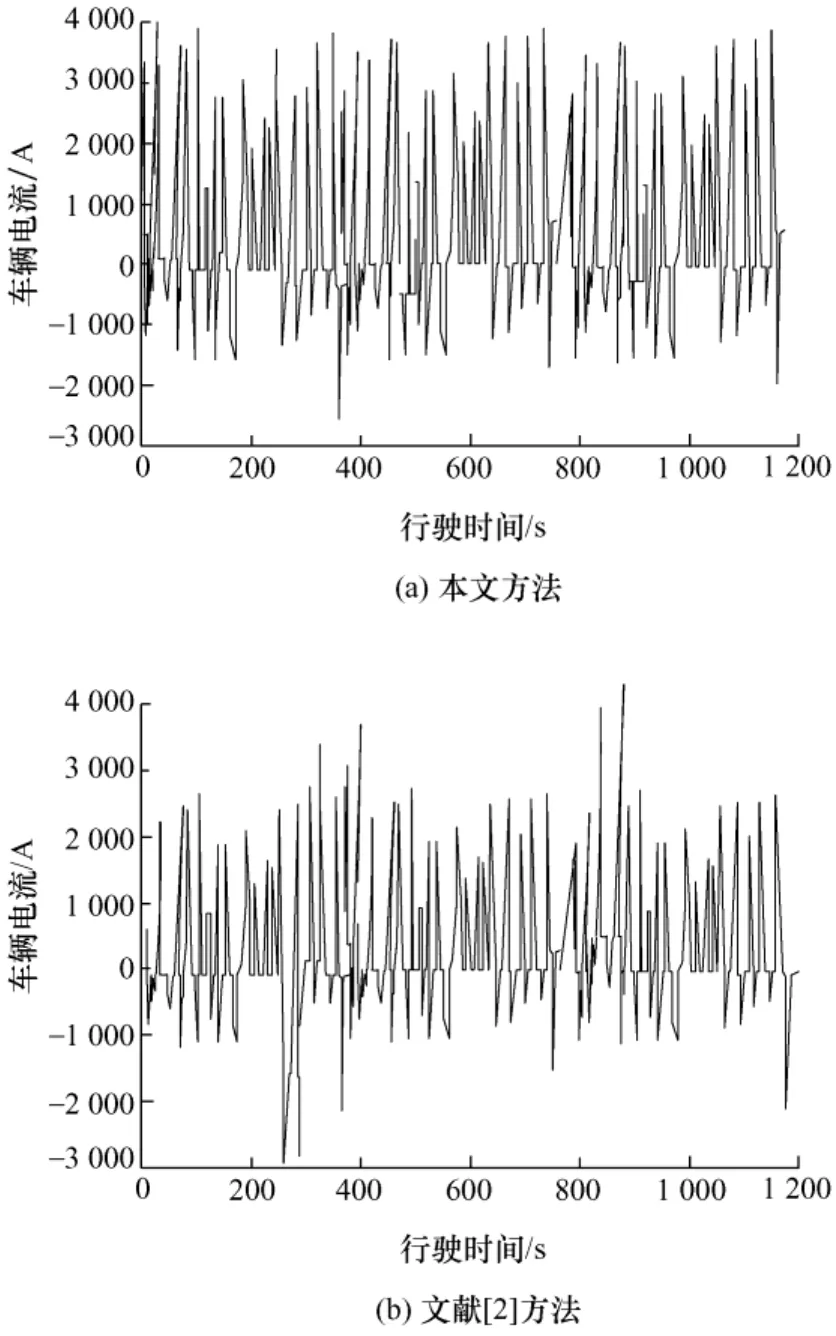
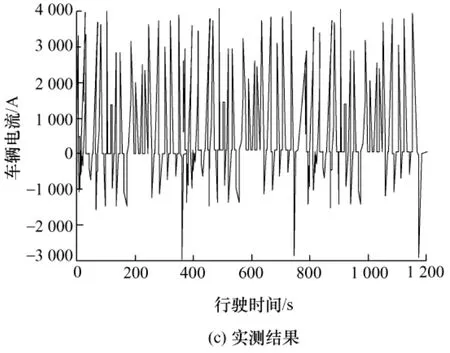
圖6 動態分布測試結果
3.4 再生能量回饋測試結果
通過圖7 試驗結果可知,文中設計方法的回饋能量依次為370 kW·h、300 kW·h、390 kW·h、360 kW·h 和440 kW·h,傳統設計方法的回饋能量依次為300 kW·h、370 kW·h、470 kW·h、270 kW·h 和470 kW·h,而實際測試的回饋能量依次為350 kW·h、300 kW·h、440 kW·h、350 kW·h和430 kW·h。通過對比可知,文中設計方法的仿真結果與實測結果較為接近,傳統仿真方法與實測結果差異較大,說明文中設計方法對于車輛能量的仿真精度高于傳統方法的仿真精度,可有效提升能量仿真效果。將此測試結果與電流動態分布測試結果相結合可知,文中設計方法使用效果更好。
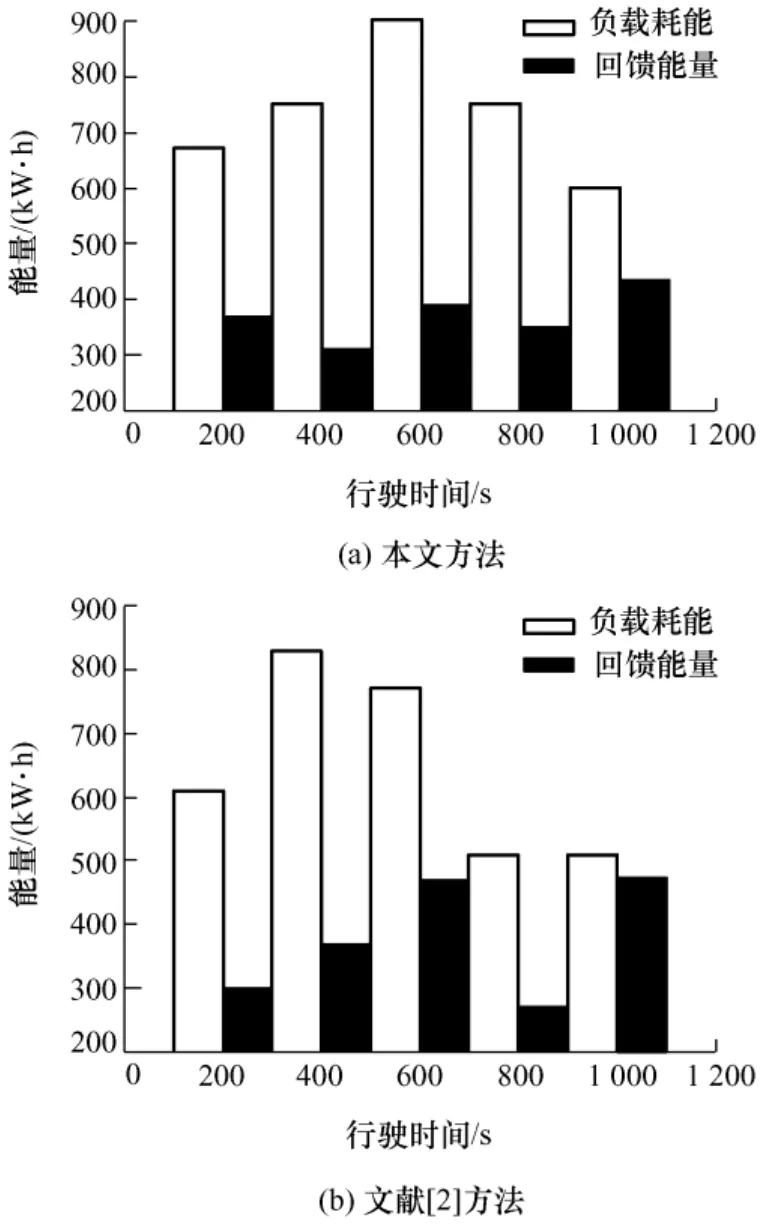
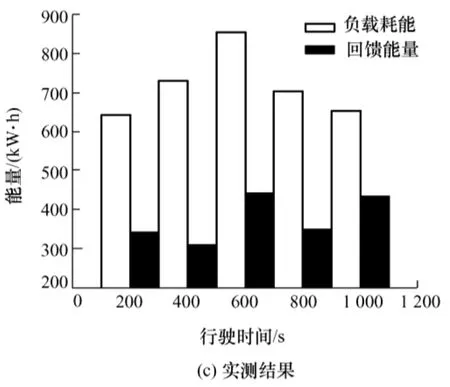
圖7 再生能量回饋測試結果
4 結論
在此次研究中設計了城市軌道交通再生能量利用的直流牽引供電系統仿真方法,并取得了一定的研究結果。
(1) 文中設計方法的車輛電流走向與實際的車輛電流走向一致,且波動的峰值大致相同,僅在波動的波谷區域出現較小的誤差,使用效果較好。
(2) 文中設計方法的回饋能量的仿真結果與實測結果較為接近,即車輛能量的仿真精度高于傳統方法的仿真精度,可有效提升能量仿真效果。
(3) 該方法易于實施,可準確、綜合地把握牽引網網壓、供電系統負荷等的概率統計特征。這些信息對于城軌牽引供電系統的設計、校驗和運營極具參考價值。
(4) 城市軌道交通再生能量利用的直流牽引供電系統仿真是一項較為復雜的課題,限于時間與技術上的不足,此次研究結果還具有一些需要改進的地方:首先,在行駛的過程中,不但要對自身的節能狀態進行控制,還需要計算環境中的影響,以此提升仿真效果;其次,在計算的過程中,注重電壓與電流的動態性,保證計算結果的可靠性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12