基于arduino 的智能爬臂機(jī)器人系統(tǒng)設(shè)計(jì)探析
2021-04-24 11:06:10林建勇
科學(xué)技術(shù)創(chuàng)新 2021年8期
林建勇
(山東理工大學(xué),山東 淄博255000)
1 概述
隨著科學(xué)技術(shù)的不斷發(fā)展,智能機(jī)器人已經(jīng)涉及到生活的各個(gè)領(lǐng)域。為了滿足垂直平面作業(yè)、橋梁設(shè)計(jì)以及建筑勘測等行業(yè)的高空作業(yè)需求,爬壁機(jī)器人一直是國內(nèi)外機(jī)器人研究領(lǐng)域的重點(diǎn)[1]。目前爬臂機(jī)器人采用氣動(dòng)以及負(fù)壓吸附方式,利用仿生學(xué)的原理實(shí)現(xiàn)在垂直平面上的運(yùn)動(dòng),缺點(diǎn)是機(jī)動(dòng)性能較差;輪式磁吸爬壁機(jī)器人是利用磁力吸附保證機(jī)器人吸附在垂直平面,靈活性強(qiáng),缺點(diǎn)是適用范圍較少,具有一定的局限性[2]。本文主要結(jié)合氣體壓力差吸附的工作原理配合輪式傳動(dòng)的運(yùn)動(dòng)特性,設(shè)計(jì)出了適應(yīng)范圍廣、可沿固定軌跡運(yùn)動(dòng)的爬壁機(jī)器人。
2 硬件設(shè)計(jì)
2.1 運(yùn)動(dòng)方式設(shè)計(jì)
根據(jù)垂直墻面需求與配置的不同,往往選用不同的運(yùn)動(dòng)行進(jìn)方式。目前主流的運(yùn)動(dòng)行進(jìn)方式有輪式運(yùn)動(dòng)、履帶式運(yùn)動(dòng)、多足爬壁式運(yùn)動(dòng)等。輪式爬壁機(jī)器人主要運(yùn)用滾輪摩擦推動(dòng)進(jìn)行前進(jìn)運(yùn)動(dòng),具有移動(dòng)速度快、可靠性強(qiáng)的行進(jìn)特點(diǎn);履帶式運(yùn)動(dòng)主要依靠接地履帶與墻面之間的相互作用力,推動(dòng)爬壁機(jī)器人的前進(jìn)與轉(zhuǎn)向,其特點(diǎn)是具有較強(qiáng)的越障能力與自鎖能力,但是行進(jìn)緩慢。多足爬壁機(jī)器人是利用仿生學(xué)的原理,通過足部吸盤吸附,關(guān)節(jié)處采用電機(jī)通過齒輪運(yùn)動(dòng),其特點(diǎn)是具有較強(qiáng)的適應(yīng)能力,能夠適應(yīng)各種不同的復(fù)雜墻面[3]。為保證爬壁機(jī)器人具有較強(qiáng)的機(jī)動(dòng)性能與靈活性,本文采用傳統(tǒng)輪式傳遞運(yùn)動(dòng),通過輪胎與墻面之間的摩擦力提供前進(jìn)的動(dòng)力。
2.2 吸附方式設(shè)計(jì)
爬壁機(jī)器人的吸附方式目前有負(fù)壓吸附、電磁吸附等,負(fù)壓吸附方式主要依靠真空發(fā)生器,通過真空泵不斷抽取爬壁機(jī)器人內(nèi)部的空氣,從而保持空腔內(nèi)部的負(fù)壓。在此基礎(chǔ)上,還應(yīng)配以密封裝置以保證爬壁機(jī)器人有足夠的摩擦力去提供爬壁機(jī)器人的前進(jìn)與轉(zhuǎn)向。永磁鐵吸附是依靠安裝在履帶上的永磁吸附塊吸附來提供前進(jìn)的摩擦力,在前進(jìn)和轉(zhuǎn)向運(yùn)動(dòng)時(shí)履帶的第一塊磁鐵脫離壁面的同時(shí),最后一塊磁鐵吸附壁面,這樣周而復(fù)始運(yùn)動(dòng)傳遞,進(jìn)而完成爬壁機(jī)器人的運(yùn)動(dòng)[4]。為了使爬壁機(jī)器人適應(yīng)多種垂直平面以及具有較高的機(jī)動(dòng)性能,本文采用負(fù)壓吸附配合輪式運(yùn)動(dòng)的總體設(shè)計(jì)。為了使爬壁機(jī)器人底盤更加貼合垂直墻面,故采用體積較小的N20 自鎖減速電機(jī),底盤與墻面之間采用橡膠貼密封,用以最大限度地制造真空環(huán)境,因橡膠貼具有延展性,故可在壓力差的作用下貼緊墻面以適應(yīng)多種平面。真空發(fā)生器采用QF1611-7000KV無刷電動(dòng)涵道風(fēng)機(jī),通過風(fēng)機(jī)不斷地將密封底盤內(nèi)的氣體抽走,使密封底盤內(nèi)的氣體氣壓小于外界大氣壓,風(fēng)機(jī)持續(xù)轉(zhuǎn)動(dòng),形成壓力差,進(jìn)而形成負(fù)壓吸附的環(huán)境[5]。
2.3 硬件連接
爬壁機(jī)器人的硬件部分主要采用arduino mega2560 R3 開發(fā)板、2200 毫安40C 航模電池、L298N 驅(qū)動(dòng)模塊,12V 的N20 自鎖減速電機(jī)、無刷電動(dòng)涵道風(fēng)機(jī)、無刷電調(diào)、數(shù)字量灰度傳感器等。主要連接方式如圖1。
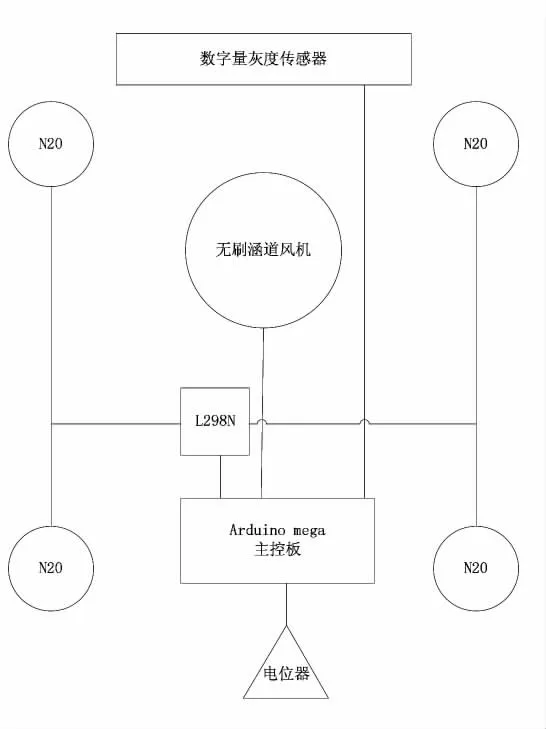
圖1 爬壁機(jī)器人硬件連接圖
爬壁機(jī)器人整車采用12V 航模電池供電。控制部分采用arduino mega2560 控制板,arduino 開發(fā)平臺(tái)是目前較為流行的開發(fā)平臺(tái),具有使用簡單、功能多樣等優(yōu)點(diǎn),可與多種傳感器進(jìn)行連接組合[6]。數(shù)字量灰度傳感器是本車的光敏循跡模塊,數(shù)字量灰度傳感器相較于模擬量灰度傳感器具有更高的靈敏度與準(zhǔn)確性,灰度傳感器的工作原理是利用不同顏色的平面對(duì)光的反射程度的靈敏度不同而進(jìn)行檢測,能夠靈敏地感應(yīng)爬行平面反饋的顏色灰度信息,便于爬壁機(jī)器人自主沿著規(guī)定的軌跡運(yùn)動(dòng)。爬壁機(jī)器人采用N20減速自鎖電機(jī)構(gòu)成運(yùn)動(dòng)系統(tǒng),主要在于其體積小、減速比大。體積小可以有效的減小避免與爬壁機(jī)器人底盤之間的空隙,有利于更好的創(chuàng)造真空環(huán)境,減速比大可以有效的提供運(yùn)動(dòng)所需要的轉(zhuǎn)矩。N20 減速電機(jī)通過L298N驅(qū)動(dòng)模塊驅(qū)動(dòng),并由arduino mega 主控板控制。根據(jù)爬壁機(jī)器人的灰度傳感器所檢測到的爬行軌跡的位置信息,arduino主控板發(fā)送給電機(jī)不同的轉(zhuǎn)速信號(hào),進(jìn)而控制爬壁機(jī)器人可以按照特定路線自主前進(jìn)。無刷涵道風(fēng)機(jī)主要通過無刷電子調(diào)速器,由arduino主控板發(fā)送PWM信號(hào)控制,通過無刷涵道風(fēng)機(jī)的快速旋轉(zhuǎn),不斷抽取底盤與壁面之間的空氣,進(jìn)而創(chuàng)造負(fù)壓環(huán)境使得爬壁機(jī)器人能夠吸附在壁面上,風(fēng)機(jī)的速度控制是通過人為調(diào)節(jié)電位器的大小來進(jìn)行選擇,可根據(jù)不同平面給予風(fēng)機(jī)不同的轉(zhuǎn)速以便適應(yīng)多種垂直平面的工作情況。
3 軟件設(shè)計(jì)
3.1 整體程序設(shè)計(jì)。爬壁機(jī)器人可以根據(jù)灰度傳感器智能判斷路線并沿著規(guī)定軌跡運(yùn)動(dòng),其軟件程序設(shè)計(jì)主要如圖2 所示。
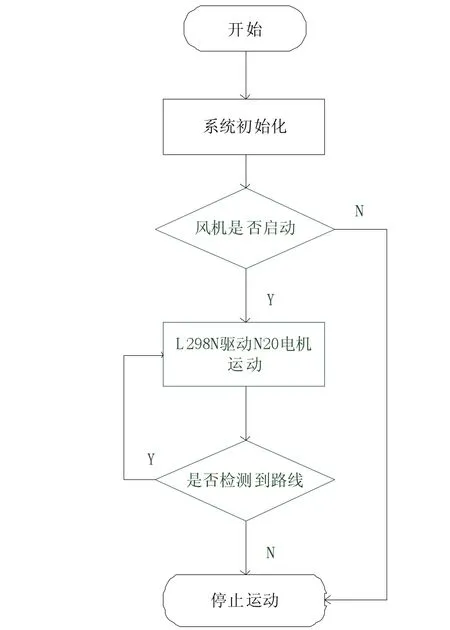
圖2 爬壁機(jī)器人程序控制流程
將硬件連接好的爬壁機(jī)器人放在垂直平面上,首先通過人為調(diào)節(jié)電位器使無刷電動(dòng)涵道風(fēng)機(jī)轉(zhuǎn)動(dòng),電位器作為風(fēng)機(jī)的模擬開關(guān),通過電位器調(diào)節(jié)模擬輸入的值,arduino主控板根據(jù)電位器的模擬輸入值調(diào)節(jié)對(duì)風(fēng)機(jī)的模擬輸出PWM值,進(jìn)而控制風(fēng)機(jī)旋轉(zhuǎn)的速度大小。通過風(fēng)機(jī)不斷抽取內(nèi)部空氣,使得爬壁機(jī)器人底盤與壁面之間產(chǎn)生負(fù)壓環(huán)境進(jìn)而吸附在垂直平面。若風(fēng)機(jī)沒有啟動(dòng),則爬壁機(jī)器人不會(huì)運(yùn)動(dòng)。當(dāng)風(fēng)機(jī)正常啟動(dòng)并可以使得爬壁機(jī)器人可以穩(wěn)定地吸附在壁面上之后,灰度傳感器會(huì)自動(dòng)檢測是否具有前進(jìn)路線的反饋信息,當(dāng)檢測到前進(jìn)路線,爬壁機(jī)器人便會(huì)在arduino mega 主控板的控制下,通過L298N驅(qū)動(dòng)模塊控制爬壁機(jī)器人前進(jìn)和轉(zhuǎn)向,前進(jìn)的同時(shí)灰度傳感器會(huì)不斷檢測路線,并采用多路灰度傳感器循跡的算法,根據(jù)前傳感器的返回值,判斷小車的與路線的相對(duì)位置關(guān)系,進(jìn)而可以調(diào)用相應(yīng)的位置處理函數(shù)[7],通過不同位置的灰度反饋與對(duì)應(yīng)的位置處理函數(shù),arduino 主控板會(huì)自動(dòng)調(diào)節(jié)PWM的占空比來控制爬壁機(jī)器人的前進(jìn)與轉(zhuǎn)向運(yùn)動(dòng)。
3.2 轉(zhuǎn)向程序設(shè)計(jì)。爬壁機(jī)器人在壁面的運(yùn)動(dòng)性能是評(píng)價(jià)爬壁機(jī)器人性能好壞的一個(gè)重要指標(biāo),在運(yùn)動(dòng)特性中轉(zhuǎn)向控制是最關(guān)鍵的一部分。本文中的爬壁機(jī)器人采用的是差速控制,差速控制的優(yōu)點(diǎn)在于其轉(zhuǎn)向控制靈活,通過四個(gè)電機(jī)的正反轉(zhuǎn)以及轉(zhuǎn)速控制便可以完成不同位置的轉(zhuǎn)動(dòng)以及原地旋轉(zhuǎn)。差速轉(zhuǎn)向控制因其控制簡單、操作靈活、被廣泛的應(yīng)用于智能車的轉(zhuǎn)向設(shè)計(jì)。爬壁機(jī)器人轉(zhuǎn)速控制主要是通過arduino主控開發(fā)板產(chǎn)生不同的PWM占空比進(jìn)而驅(qū)動(dòng)電機(jī)按照不同的轉(zhuǎn)速運(yùn)動(dòng)。PWM波是通過單片機(jī)編程經(jīng)脈寬調(diào)制專用芯片輸出,PWM調(diào)速對(duì)外界干擾有較大的抵抗力,可以通過調(diào)頻、調(diào)寬、調(diào)寬調(diào)頻三種方法改變PWM脈沖占空比,PWM調(diào)速也因其控制方式簡單,對(duì)干擾的抵抗力較強(qiáng),被廣泛的用于電機(jī)的速度調(diào)節(jié)過程中[8]。爬壁機(jī)器人的速度與轉(zhuǎn)向調(diào)節(jié)邏輯如表1。
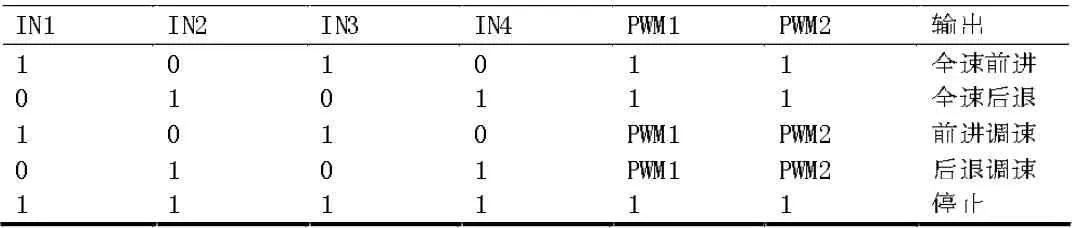
表1 爬壁機(jī)器人電機(jī)控制信號(hào)邏輯表
L298N驅(qū)動(dòng)模塊具有4 個(gè)輸入引腳,2 個(gè)使能引腳以及4 個(gè)輸出引腳。通過雙H 橋直流電機(jī)驅(qū)動(dòng)芯片控制,采用12V電壓供電。其中IN1、IN2、IN3、IN4 分別為L298N驅(qū)動(dòng)模塊的數(shù)字輸入,表格中PWM1 與PWM2 分別代表ENA1 與ENA2,PWM1 與PWM2 的作為模擬輸入接口。L298N驅(qū)動(dòng)模塊的這六個(gè)引腳與arduino主控板相連,通過使用arduino主控板改變6 個(gè)引腳信號(hào)的輸入邏輯來控制L298N的輸出,進(jìn)而控制4 個(gè)N20 電機(jī)的轉(zhuǎn)速運(yùn)動(dòng)。通過灰度傳感器的位置反饋信號(hào)調(diào)用對(duì)應(yīng)的位置處理函數(shù),對(duì)應(yīng)的位置處理函數(shù)對(duì)應(yīng)相應(yīng)的輸入邏輯信號(hào)。經(jīng)過arduino主控板的程序處理便可以實(shí)現(xiàn)爬壁機(jī)器人的前進(jìn)、后退以及轉(zhuǎn)向操作。
4 結(jié)論
本文通過對(duì)爬壁機(jī)器人進(jìn)行吸附結(jié)構(gòu)設(shè)計(jì)、運(yùn)動(dòng)結(jié)構(gòu)設(shè)計(jì)以及整體程序設(shè)計(jì),可以實(shí)現(xiàn)爬壁機(jī)器人在多種壁面環(huán)境下的工作運(yùn)動(dòng)。通過灰度傳感器對(duì)路線位置的反饋,可實(shí)現(xiàn)爬壁機(jī)器人沿著特定軌跡路線進(jìn)行運(yùn)動(dòng),控制系統(tǒng)采用成本較低arduino開發(fā)板,整體成本低廉,具有良好的應(yīng)用價(jià)值與市場前景。