電動特種車輛超低速電機控制策略
2021-04-22 08:32:04高建樹田翼萌張埔寧
科學技術與工程 2021年8期
關鍵詞:控制策略
高建樹, 田翼萌, 張埔寧
(1.中國民航大學機場學院, 天津 300300; 2.中國民航大學電子信息與自動化學院, 天津 300300)
為加速推進智慧機場建設,大力推廣使用新能源設備和車輛已成為中國各大機場近幾年的重要任務。由于機場的特種車輛存在超低速近機、超低速對接等特殊行駛工況,使得機場司對于機場特種車輛速度控制要求不斷提高。原有的燃油車低速行駛存在著控制不平穩、操控性難的問題,而電動車可通過精確地數字計算對內置永磁同步電機(built-in permanent magnet synchronous motor,IPMSM)進行精確控制。目前市場中絕大多數電動車一般都采用以轉矩為目標、傳統比例積分(proportion integration,PI)控制的矢量控制方法,但此方法并不適用于機場環境下電動汽車極低速平穩運行的特殊工況,因此,針對如何實現電動汽車電機低轉速精確穩定控制已成為近些年的研究熱點。
諸多學者對于不同電機超低速調速性能作了深入研究。文獻[1]針對無速度傳感器控制提出一種新的全階自適應觀測器算法,可實現感應電動機在低速、極低速和零速下穩定運行。文獻[2]通過采用滑膜變結構控制器加以改進,提高了系統的響應速度和抗干擾能力。文獻[3]將最大轉矩電流比加以改進,利用綜合電流矢量等效替代轉矩控制。此外,多數極低速研究圍繞以轉矩為控制目標,對閉環模型作相應改進,針對類似于超低速行駛的特殊工況下恒轉速控制研究較少[6-12]。
現提出一種電動特種車輛超低速行駛工況下恒定轉速運行的雙閉環模糊控制策略,將汽車以轉矩為控制目標轉變為轉速為控制目標,對于優化電動特種車特殊工況下的行駛性能起到重要作用,對實現自主研發性能優良的電動行李牽引車具有重要參考價值,為推動電動特種車輛產業的發展具有重要意義。
1 d-q軸數學模型及矢量控制原理
1.1 d-q軸數學模型
首先對電動特種車用到的內置式永磁同步電機作如下假設:①定子上的繞組接法為Y形,三相繞組對稱排布,各相繞組空間上相差120°,轉子中的永磁體在定轉子氣隙內產生主磁場沿氣隙圓周呈正弦分布[4];②忽略定子繞組齒槽對氣隙磁場分布的影響[4];③假定鐵芯磁導率無窮大,忽略定子鐵芯與轉子鐵芯的渦流損耗與磁滯損耗[4]。
基于上述假設,建立永磁同步電機d-q軸數學模型[4]。
(1)
(2)
(3)
(4)
式中:所有參數均為d-q坐標系下的參數;ud、uq分別為IPMSM定子電壓矢量在d軸和q軸的分量;R為三相對稱定子繞組一相電阻;P為微分算子;id、iq分別為IPMSM定子電流矢量在d軸和q軸的分量;ψd、ψq分別為d軸磁鏈分量和q軸磁鏈分量;Ld、Lq分別為電樞電感在d軸和q軸的分量;ωr為電機轉子電角速度;ωm為電機轉子機械角速度;ψf為電機永磁體磁鏈;Te為電機電磁轉矩;Tl為電機負載轉矩;J為電機轉動慣量,B為電機軸摩擦系數[5]。
1.2 電動汽車電機矢量控制原理

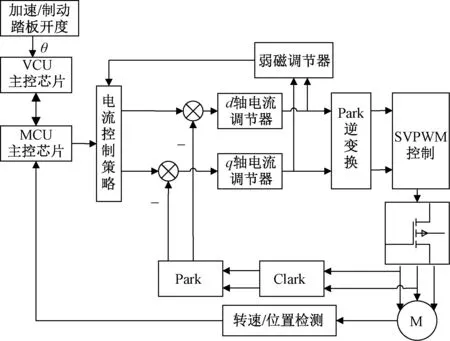
圖1 電動汽車電機控制策略系統框圖Fig.1 Frame diagram of electric vehicle motor control strategy system
2 恒轉速雙閉環模糊矢量控制系統
針對民航機場電動特種車輛(如飛機牽引車、行李傳送車和行李牽引車等)超低速行駛的特殊工況,要求到達指定位置后穩定超低速對接飛機或者托盤。這要求超低速行駛時電機盡可能以精準的轉速穩定運行,并具有較快的響應速度以及較強的抗干擾能力。
基于以上考慮,將轉矩控制轉為恒轉速控制策略,速度調節器與電流調節器全部改為模糊PI參數自整定控制器,結合電壓前饋補償的電流調節器對電機進行控制。此工況下轉速較低,不存在弱磁電流調節,但考慮到正常行駛下依舊存在弱磁過程,所以對于弱磁環節依舊保留,不予討論。控制策略總結如下:汽車正常行駛時采用基于轉矩控制的MTPA與弱磁相結合的控制策略;汽車超低速行駛時采用恒轉速控制下的雙閉環模糊PI控制策略。電動汽車電機改進控制策略系統框圖如圖2所示。
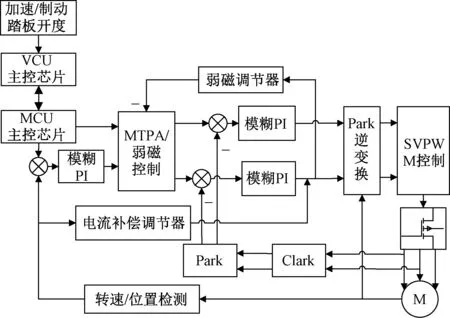
圖2 電動汽車電機改進控制策略系統框圖Fig.2 Frame diagram of electric vehicle motor improvement control strategy system
2.1 雙閉環模糊自整定控制器
為提高電動特種車超低速運行時電機的動態響應能力和抗干擾能力,將模糊控制方法與傳統PI策略相結合,構建模糊PI控制器。
2.1.1 輸入輸出變量
(5)

2.1.2 模糊控制器參數
模糊控制器輸入和輸出都是精確量,主要有輸入誤差、輸入誤差變化率、輸出ΔKp、輸出ΔKi4個參數的論域,所以轉速與電流兩個模糊控制器共8個主要參數。
轉速環誤差(E)的論域{-xe,xe}的取值為
{-xe,xe}={-30,30}
(6)
轉速環誤差變化率(Ec)的論域{-xec,xec}的取值為
{-xec,xec}={-300,300}
(7)
轉速環輸出量ΔKp的論域{-yp,yp},轉速環輸出量ΔKi的論域{-yi,yi},有
{-yp,yp}={-yi,yi}={-3,3}
(8)
轉速環誤差(E)的論域{-xe,xe}
{-xe,xe}={-300,300}
(9)
電流環誤差變化率(Ec)的論域{-xec,xec}
{-xec,xec}={-3 000,3 000}
(10)
上述4個變量模糊子集的論域{-m,m}的取值為
{-m,m}={-3,3}
(11)
2.1.3 隸屬度函數與模糊規則
模糊集合選擇7個級別:負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。在隸屬函數選取上,選取計算量小、靈敏度高的三角形隸屬函數作為輸入和輸出的隸屬函數,輸入輸出隸屬度函數如圖3所示。
依據專家經驗與仿真數據制定了轉速環與電流環ΔKp、ΔKi的模糊控制規則,設計規則如下:①當誤差波動很大時需要盡快做出調整,增大Kp并減小Ki;②當誤差波動一般時需要避免電機有大的超調,Kp與Ki大小要適中;③當誤差波動較小時需要保證電機的穩定與精準,減小Kp并增大Ki。具體如表1、表2所示。
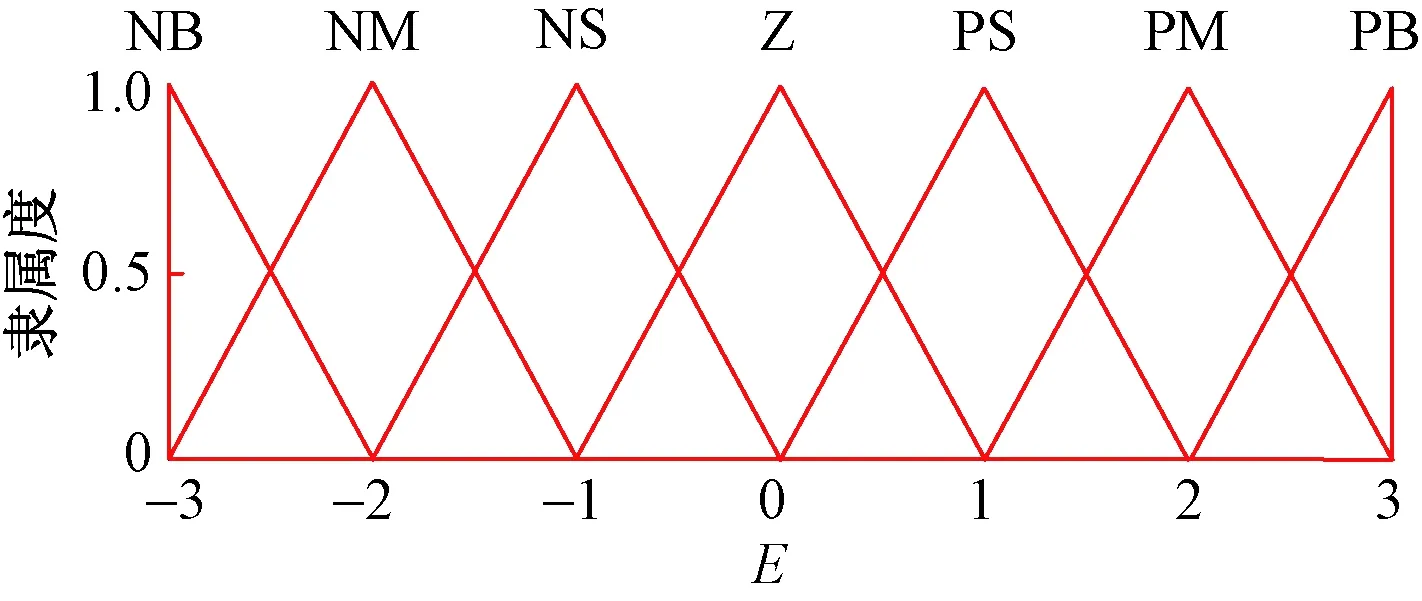
圖3 輸入、輸出隸屬度函數Fig.3 Input and output membership functions
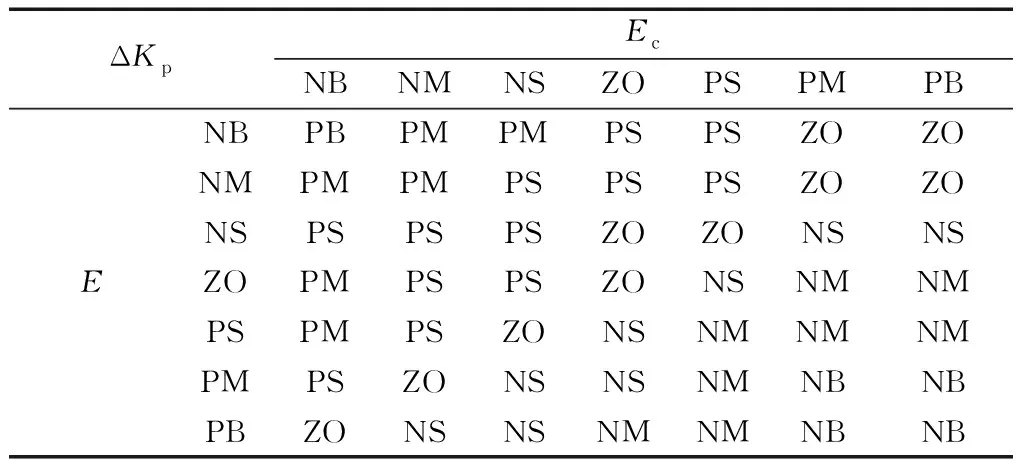
表1 ΔKp模糊規則Table 1 The fuzzy rules of the ΔKp
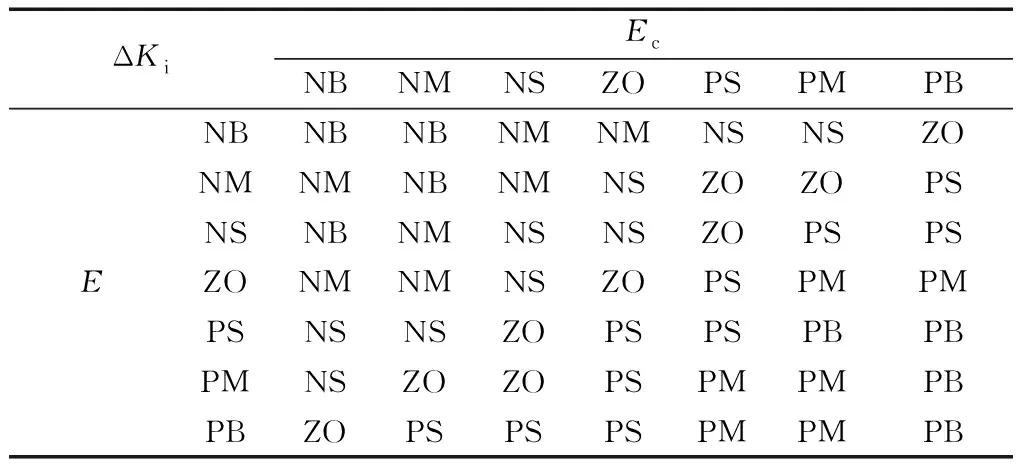
表2 ΔKi模糊規則
2.1.4 模糊推理與解模糊
運用Mamdani最小運算模糊推理方法得到49條推理語句,最后使用重心法解模糊,具體公式為
(12)
式(12)中:u為輸出清晰量;n為輸出的量化級數;ui為論域中的元素;μi(ui)為論域元素的隸屬度。
2.2 電流補償調節器
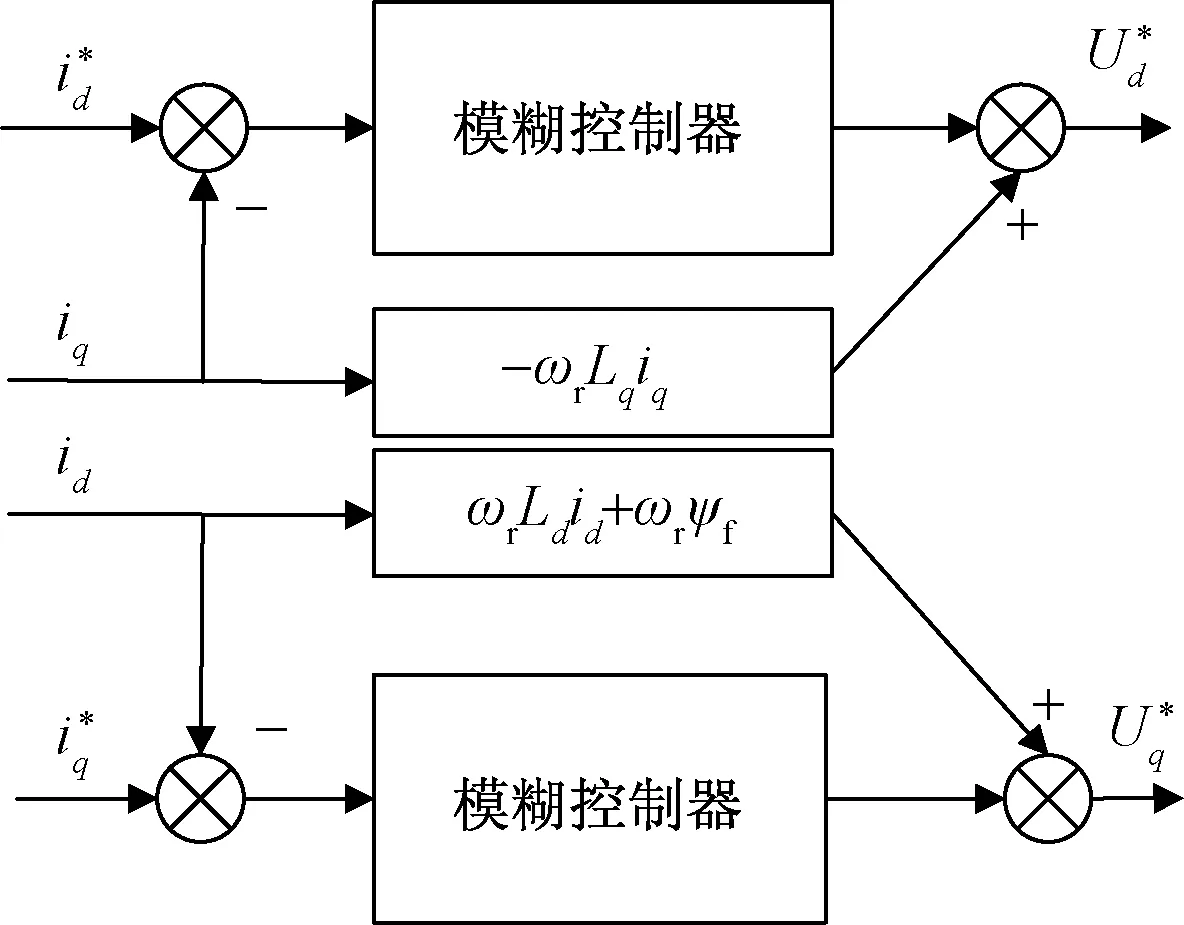
圖4 電流補償調節器Fig.4 Current compensation regulator
為避免正常行駛切換到超低速行駛過程存在的交叉耦合的影響,有必要對電壓方程解耦。如圖4所示,采用較為成熟的電壓前饋耦合法,通過增加電壓前饋補償型電流調節器來實現d-q軸電流環解耦控制。
3 仿真分析與實驗驗證
3.1 雙閉環模糊矢量模型仿真分析
根據改進電動汽車電機改進控制策略系統框圖(圖2),利用Simulink搭建了基于恒轉速控制下的雙閉環模糊PI仿真模型。仿真過程中,恒定轉速依次通過轉速外環模糊PI調節器、MTPA計算得到相應交直軸電流值,其次通過電流內環模糊PI調節器計算出交直軸電壓,最終通過SPWM輸出6路開關量控制電機運行。仿真參數如表3所示。
此次仿真將PI模型、單一轉速模糊PI模型與雙模糊PI模型三者分別進行了轉速、轉矩以及電流的對比,仿真過程如下:模擬超低速行駛中的參數變化,給定初始轉速2 000 r/min、0.1 s轉速降至20 r/min、0.2 s時突加負載擾動40 N·m,對比雙模糊控制、單一轉速環模糊控制與PI控制下轉速n、轉矩Te和電流i三者的區別,仿真結果如圖5所示。
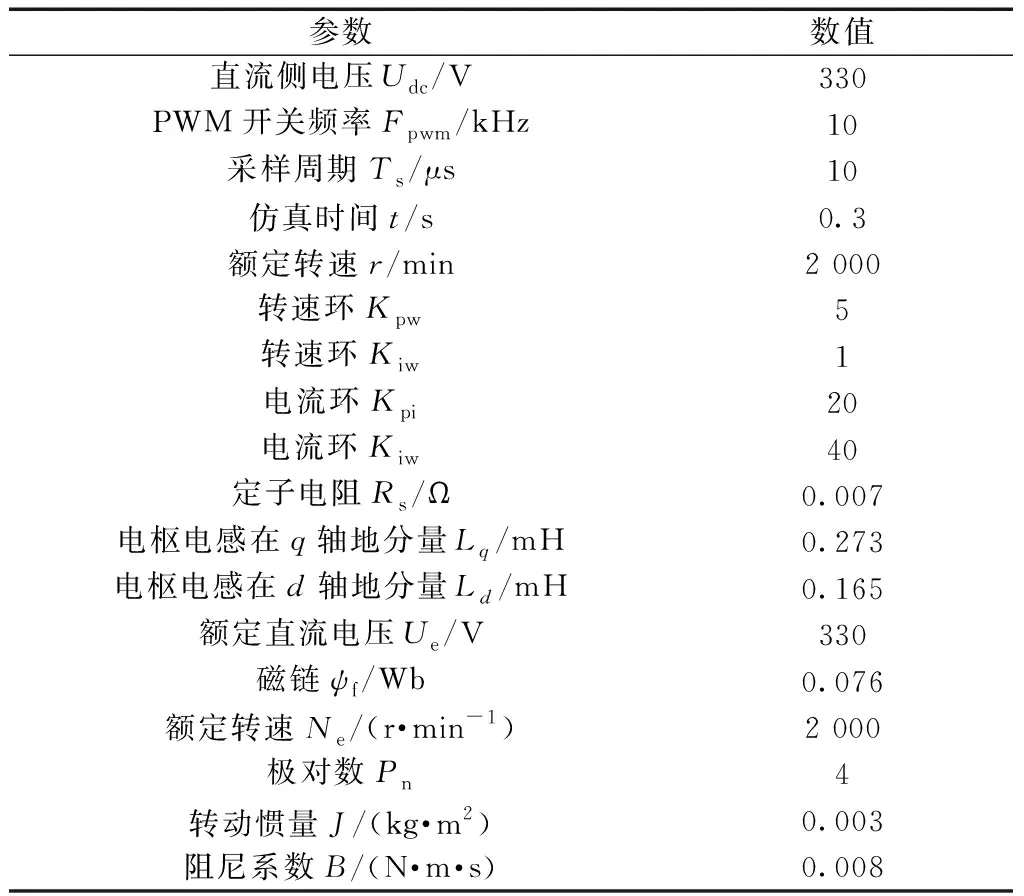
表3 仿真條件參數設置
圖5(a)中電機在雙模糊PI控制下從始至終都保持最快的響應速度,相比其他兩種控制方法,到達初始轉速的時間由0.05 s提升至0.03 s,達到極低轉速的時間由0.14 s提升至0.125 s。從圖5(b)和圖5(c)可以看出,當電機在極低速運行下附加擾動時,傳統PI下的轉速受負載擾動影響偏差較大,雙模糊PI相比于PI轉矩穩定度提高約16.7%。圖5(d)中相比于單一模糊PI,雙模糊PI削弱了峰值電流。綜上所述,仿真過程中雙模糊PI控制下的響應性能與抗擾性能優于另外兩種控制方式。
3.2 硬件平臺測試分析
實驗依托于中國民航大學與唐山德惠航空裝備有限公司聯合開展的“民航電動行李牽引車輛研發項目”,利用基于DSP28335的硬件平臺控制器對電動行李牽引車55 kW電機進行測試,樣車主要參數如表4所示。
將底層驅動程序與應用層程序整合后選用CodeWarrior進行編譯,并通過上位機下載至中央處理器(central processing unit,CPU)內。調試過程中利用CAN編輯器(CANdb++)進行數據庫文件(database can,DBC)制作并導入CAN總線分析儀(peak can explore,PCAN-Explore),然后通過CAN卡采集實車CAN總線數據,利用上位機進行實車數據分析,整個通信過程中CAN采用CAN 2.0 B擴展幀格式,總線通信波特率為250 kbps,實驗樣車數據采集過程如圖6所示。操作過程中駕駛員手動汽車外部開關按鈕改變控制器輸入開關量,進而切換電機控制策略,汽車將以恒定轉速自動運行。
實驗轉速條件設定為20 r/min,依次測試不同控制策略下電機電流i的響應情況,PCAN-Explore數據采集界面如圖7所示。圖7(a)表明,雙模糊PI控制相比傳統PI電流的響應速度提升2.1%,峰值降低了7.2%,穩定時間提升了4.5%。圖7(b)顯示,相比單一模糊PI電流的響應速度提升3.1%,曲線振幅明顯減弱,穩定性得到提升。
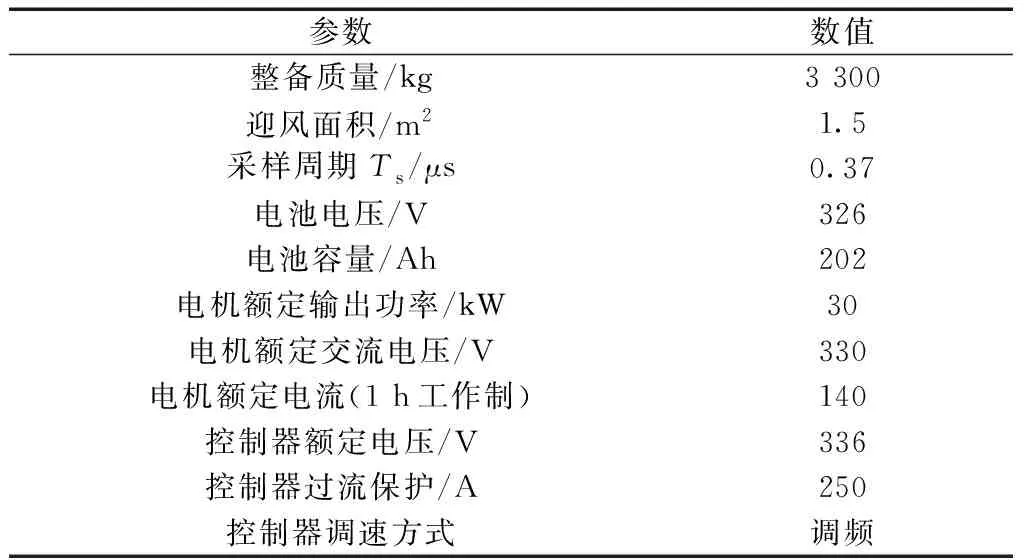
表4 電動行李牽引車主要參數
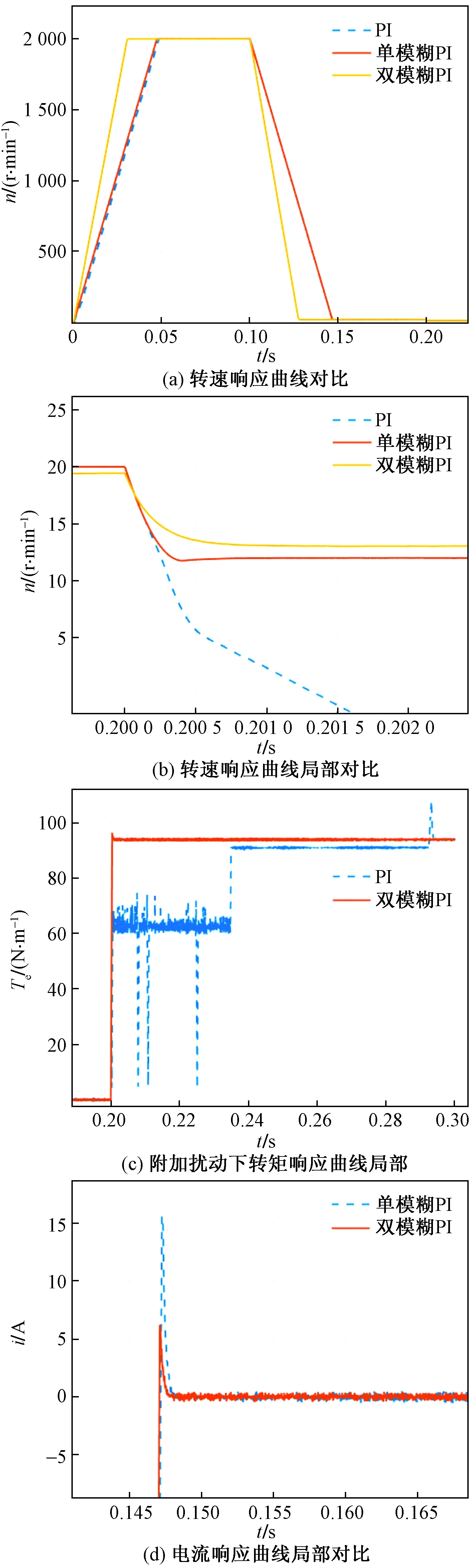
圖5 轉速、轉矩及電流響應曲線對比Fig.5 Comparison of speed, torque and current response curves
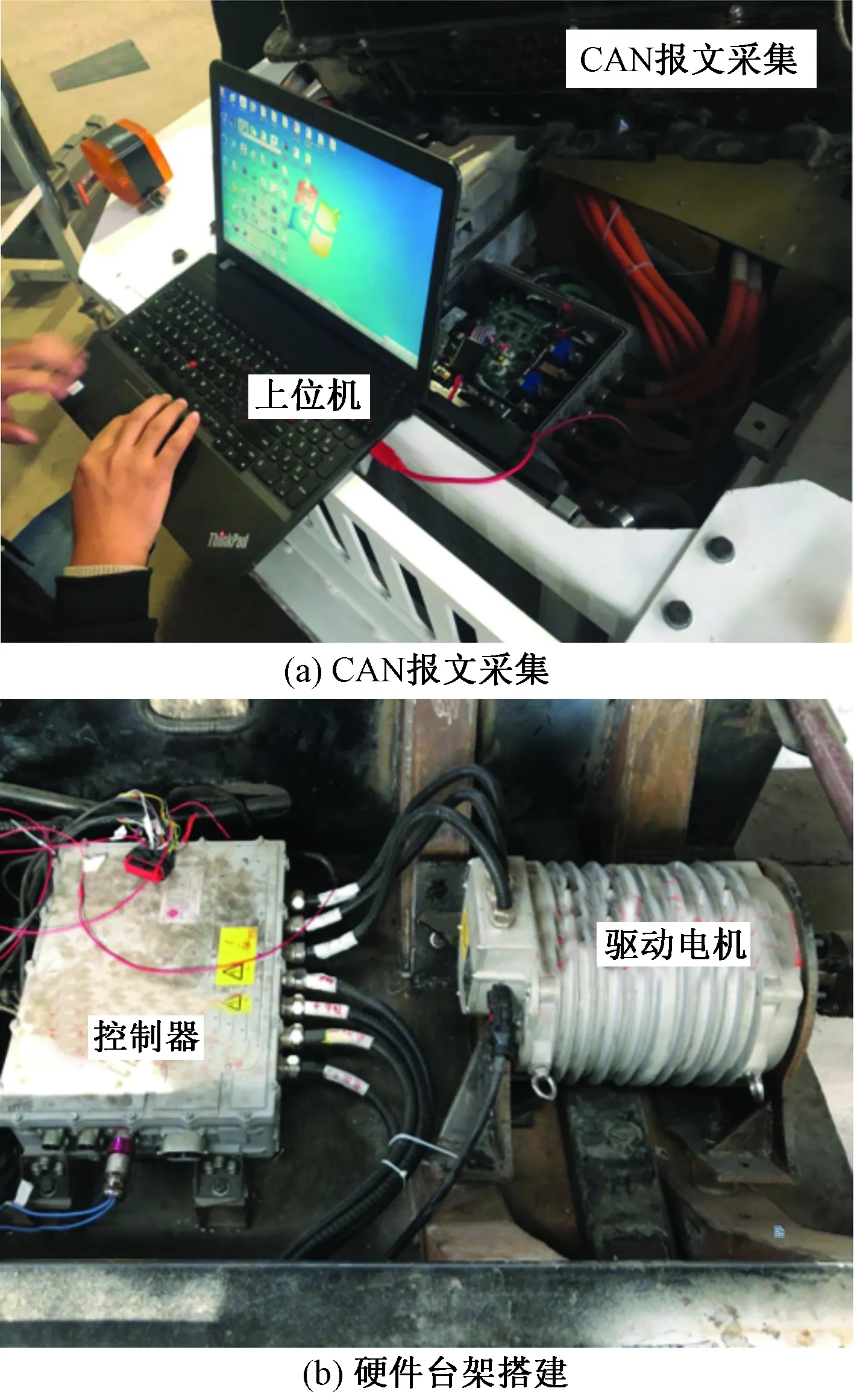
圖6 實驗數據采集Fig.6 Experimental data collection
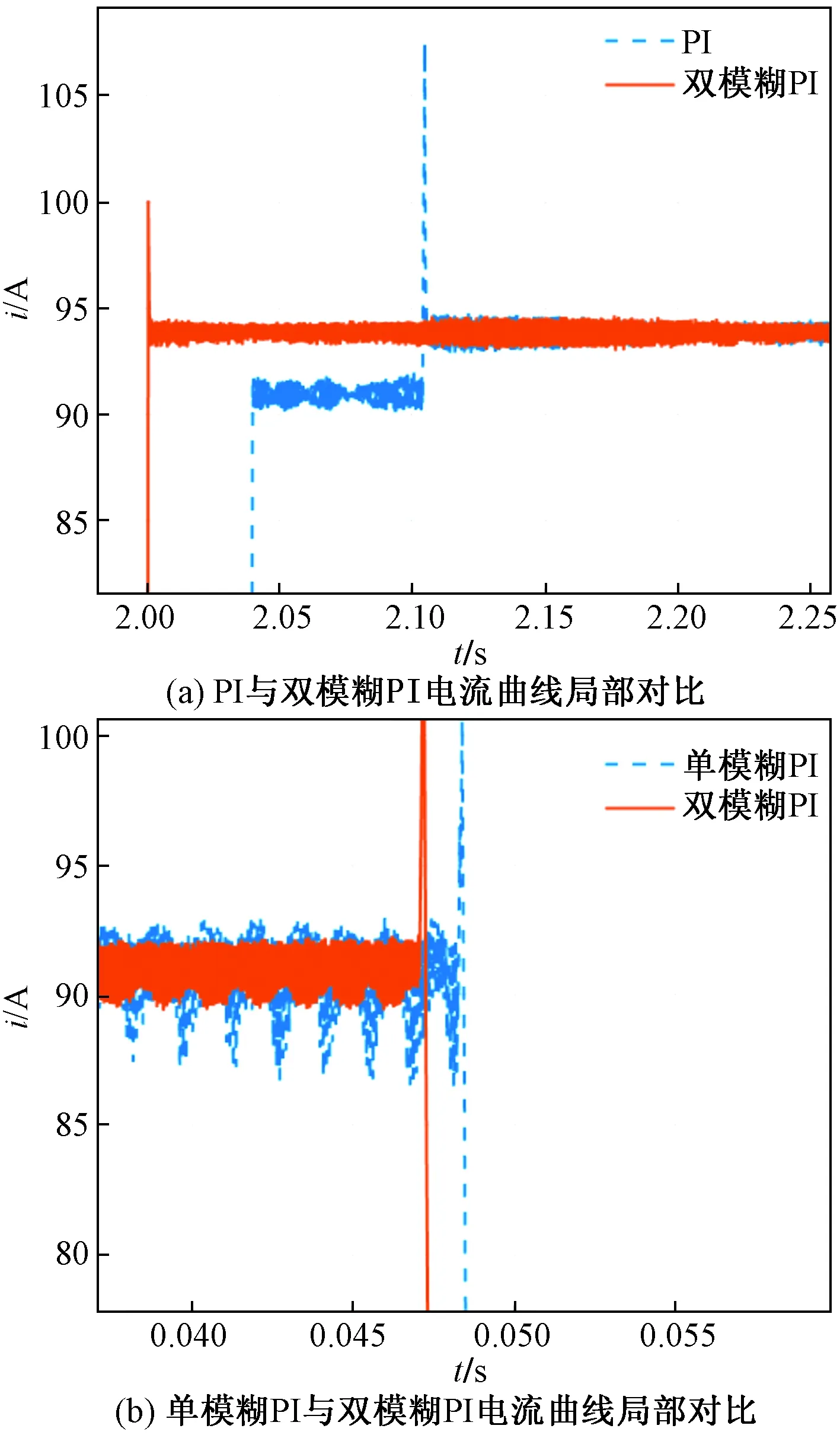
圖7 PCAN-Explore數據采集截面Fig.7 PCAN-Explore data acquisition interface
4 結論
針對機場電動特種車輛超低速行駛的特殊工況制定了一種恒轉速控制下的雙閉環模糊控制策略,將正常行駛下轉矩控制策略轉變為轉速控制策略,速度環和電流環的PI控制器轉換為模糊自適應控制器,并運用Simulink搭建了雙閉環模糊矢量仿真模型,對其進行仿真實驗驗證,同時通過硬件平臺進行實車測試,得出如下結論。
(1)仿真條件下雙模糊PI控制相比傳統PI電流有效提升響應速度,轉矩穩定度提高約16.7%。相比于單一模糊PI,雙模糊PI削弱了峰值電流。
(2)實車測試結果顯示雙模糊PI控制相比傳統PI電流的響應速度提升2.1%,峰值降低了7.2%,穩定時間提升了4.5%。相比單一模糊PI電流振幅明顯減弱,穩定性得到提升。
綜上所述,本文方法對于提高轉速相應速度、抑制峰值電流、提高轉矩穩定性等方面效果明顯,可有效提高電動特種車超低速行駛下的快速穩定運行。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
