定位裝置輔助下四肢深部金屬異物的精準定位及取出
2021-04-19 14:52:50蘇煒煒何藻鵬張國棟李衛許靖廖政文謝普生林東鑫黃文華
中國臨床解剖學雜志 2021年2期
蘇煒煒,何藻鵬,張國棟,李衛,許靖 廖政文,謝普生,林東鑫,黃文華
1.南方醫科大學第三附屬醫院骨科,廣州 510630;2.南方醫科大學基礎醫學院人體解剖學教研室,廣東省醫學生物力學重點實驗室,廣州 510515;3.廣州醫科大學附屬順德醫院手足整形外科,廣東 佛山 528300;4.南方醫科大學附屬順德醫院骨科,廣東 佛山 528300;5.南方醫科大學附屬珠江醫院康復醫學科,廣州 510280
據報道,每1000例至10000例手術中就有1例異物殘留;由于各種原因,目前報道的比率遠低于實際[1,2]。臨床中,金屬異物占殘留異物的很大一部分,它可引起感染、過敏反應、金屬銹蝕、異物肉芽腫,甚至誘發腫瘤[3,4]。所以,需要盡快取出異物。常用的異物定位裝置有幾種:金屬網定位是定制兩塊相互垂直的金屬網,用X 線攝片來確定異物的位置[5],這個裝置只是縮小異物的尋找范圍,并不能準確定位異物;手術入路可視化導航(SAVN)可以捕捉穿過體內異物的X線軌跡,并用激光束形成可視化的導航軌道[6],但該設備呈現的是一個虛擬導航路徑,從虛擬導航路徑到達定位目標存在操作難點,而且定位后患者不能移動,否則會出現定位偏差;計算機輔助導航系統對患者進行薄層CT 掃描,建立數字化模型,通過坐標轉化獲取導航探針與三維數字化模型的相對位置進行定位[7],但該數字化模型是根據患者術前的CT 數據重建的,由于肢體的運動、肌肉的收縮,異物在術中的位置可能已經改變,且設備昂貴,不易推廣。為此,本研究針對四肢深部軟組織金屬異物殘留,設計一種新型的定位裝置,結合C 型臂透視機實現精準定位。
1 材料與方法
1.1 實驗材料
1.1.1 設備 軟件:Mimics 19.0(Materialise 公司,比利時);SolidWorks 2011(Dassault Systemes S.A,法國)。硬件:3D 打印機:融宇RY-A600 3D 打印機(廣州融宇信息科技有限公司,中國);CT 機:Philips/Ingenuity CT(飛利浦公司,荷蘭);C 型臂:島津WHA-200(島津公司,日本)。
1.1.2 標本 成人尸體防腐上肢標本6 側、下肢標本4 側,由廣州醫科大學附屬順德醫院提供。本實驗造模65 例,分實驗組和對照組,實驗組為65 例異物的實際定位結果,對照組為理論上這65 例異物的定位結果,即實驗設計的理想的65 例異物的定位偏差距離(D2)均為0。
1.2 實驗方法
實驗標本造模、模擬異物的定位和取出由不同的醫生完成,65 例實體標本定位實驗由3 位不同年資的外科醫生完成。
1.2.1 定位裝置設計制作 定位裝置包括主件(定位底座、定位臂、定位套筒針)和操控部件(3 軸平移滑臺)。使用SolidWorks 2011 設計定位底座和定位臂,底座上有12 個凹槽,可供定位臂插入;定位臂上有7個定位孔,供定位套筒針插入。定位套筒針包括外套筒(外徑5.8 mm,內徑3.0 mm,長100 mm)、內套筒(外徑2.9 mm,內徑1.6 mm,長150 mm)、定位針(φ 1.5 mm,長200 mm 的醫用克氏針)。裝配上述部件之后,所有定位針的軸線延長線相交于一點,即為定位裝置中心(圖1A)。把定位底座及定位臂分別以STL文件格式導入Cura 切片軟件,打印參數設置為層厚0.2 mm 及填充密度20%,打印材料為聚乳酸(PLA)線材,用3D 打印機打印成型。3 軸平移滑臺包括3 個行程均為200 mm 直線滑臺模組、3 個兩相步進電機、3個步進驅動器、1 個明緯開關、1 個運動控制器、4 個模組連接件及4 個模組固定底座。組裝上述部件為3 軸平移滑臺,各軸最大行程為200 mm,步進角度1.8°,重復定位精度為0.03 mm。通過連接件將3 軸平移滑臺與定位底座相連接(圖1B)。
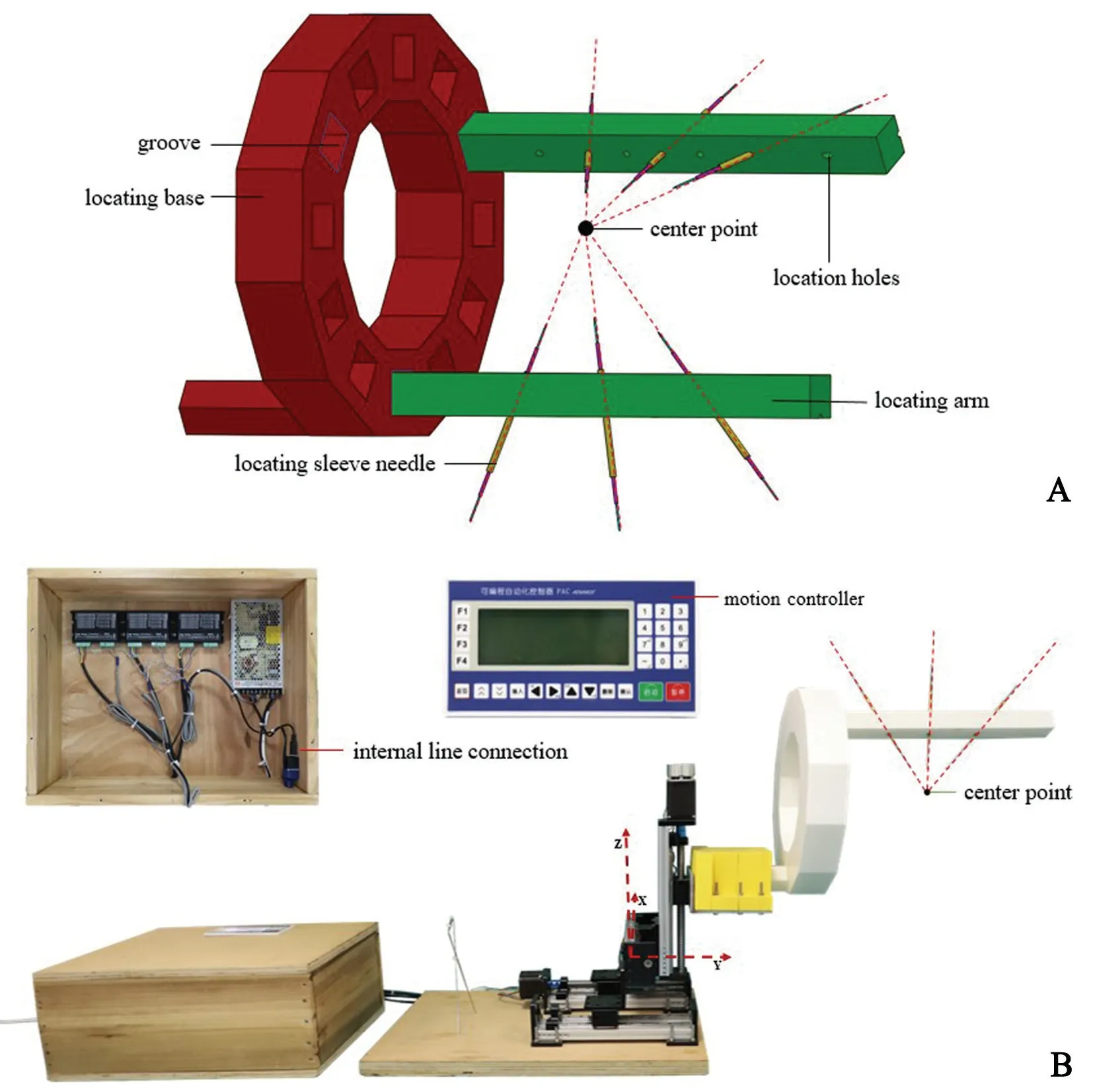
圖1 定位裝置設計A:定位裝置主件 B:主件連接操控部件Fig.1 Design of locating deviceA: Main part the locating device; B: The real object of the locating device
1.2.2 標本造模 以手術尖刀切開長5~8 mm 的小切口,切開皮膚、皮下組織、深筋膜及肌肉,以蚊式鉗夾取φ2.0 mm 的金屬球置入標本軟組織深部。
1.2.3 深部軟組織金屬異物定位(1)垂直位透視:將標本放置于標本架上,調整C 型臂的位置進行垂直位透視,透視方向與3 軸平移滑臺的Z 軸平行,在透視下調節X 軸及Y 軸,直至顯示屏上3 根定位針軸線延長線的交點與異物的中心重合(圖2);(2)水平位透視:將C 型臂旋轉90°進行水平位透視,C 型臂透視方向與3 軸平移滑臺的Z 軸垂直,在透視下調節Z 軸,微調X 及Y 軸,直至顯示屏上3 根定位針軸線延長線的交點與異物的中心重合(圖3),此時,定位裝置的中心與異物的中心重合;(3)解剖安全區穿刺:選擇安全的解剖區域及手術入路,據此調整定位臂在定位底座凹槽中的位置,通過定位臂的定位孔置入2 根定位針以定位異物,此時,2 根定位針相交于定位裝置的中心,亦即異物的中心(圖4)。
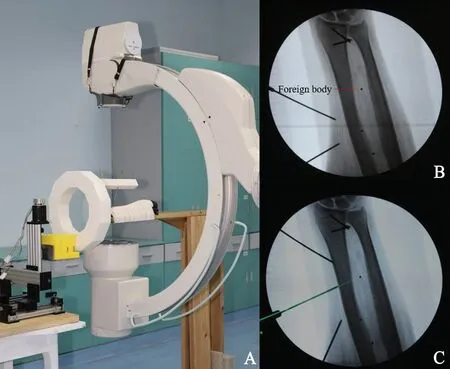
圖2 垂直位透視A:設置C 型臂的透視方向與3 軸平移滑臺的Z 軸平行 B:透視下調節X 軸和Y 軸 C:3 根定位針軸線延長線的交點與異物中心重合Fig.2 Perpendicular fluoroscopyA: The perspective direction of the C-arm was set parallel to the Z-axis; B: X-ray image before the fluoroscopy regulation;C: The intersection point of the extension line of the axis of the three positioning needles was coincident with the center of the foreign body

圖3 水平位透視A:設置C 型臂透視方向與Z 軸垂直 B~C:調節3 根定位針軸線延長線的交點與異物中心重合Fig.3 Horizontal fluoroscopyA: The perspective direction of the C-arm was set perpendicular to the Z-axis; B-C: The intersection point of the extension line of the axis of the three positioning needles was coincident with the center of the foreign body
1.2.4 實驗模擬操作 參考本組前期研究應用Mimics 19.0 軟件對標本進行薄層CT 掃描和三維重建[8,9](圖5A)。模型處理步驟如下:(1)以Edit mask 命令分別將定位針、異物及皮膚分解(圖5B);(2)分別以定位針的軸線為中心軸擬合φ1.5 mm 的圓柱體,兩個圓柱體的交點視為定位裝置的中心(圖5C);(3)以Cut 命令切開異物的中心剖面,該剖面的中心為異物的中心,定位裝置中心到異物中心的距離即為定位偏差距離(D1)(圖5D)。

圖4 解剖安全區置入定位針穿刺X 線片A:垂直位 B:水平位Fig.4 X-ray films of positioning needles puncturing in safe anatomical areaA-B: Perpendicular and horizontal X-ray image after the placement of locating needles

圖5 三維模型處理與數據采集A:定位后三維重建 B:定位針、異物及皮膚分解 C:以定位針的軸線為中心軸擬合φ 1.5 mm 的圓柱體 D:定位偏差距離D1 測量 E:最接近理想的D1 原理圖Fig.5 3D model processing and data acquisitionA: 3D reconstruction after location; B:Decompose of locating needles,foreign body and skin;C: Fitting of cylinders ofφ1.5mm by the axis of locating needles;D: Measurement of the location deviation distance (D1);E:Schematic diagram of the optimal D1

圖6 不同精度等級的合格定位數Fig.6 Qualified numbers in different accuracy levels
1.2.5 手術取出異物及數據采集 在定位針導視下逐層切開皮膚、皮下組織、深筋膜及肌肉等組織,直至2 根定位針交叉點平面,在此平面內尋找并取出異物。記錄透視時間(T1)和異物取出時間(T2)。T1 為每例異物定位過程中垂直位和水平位透視時間,T2為每例從切開皮膚到取出異物的時間。在實際操作中,當2 根φ1.5 mm 克氏針平行相貼,并與φ2 mm 的金屬球相切時,D1 最小(圖5E)。可計算出D1 最小值為1.58 mm,則實際定位偏差距離(D2)=D1-1.58 mm。
1.3 統計學分析
從0~5 mm 按0.1 mm 的間隔劃分精度等級。如果D2 小于或等于對應的精度等級,則定義為該定位合格;如果D2 大于該精度等級,則定義為不合格。分別統計不同精度等級的合格和不合格數。實驗組在不同精度等級的合格數記為n/65;對照組屬于本實驗設計的理想狀態,理論上定位無偏差,65 例D2 均為0,每個精度等級的合格數為65/65。在SPSS 20.0 中用卡方檢驗比較實驗組和對照組在不同精度等級的合格與不合格定位數,當P>0.1 時,對應的精度等級視為定位裝置的定位精度。這種用來闡明定位精度等級的統計學方法見本組前期研究[8,10]。
2 結果
所置入的65 例金屬異物全部實現精準定位及取出。透視時間(T1)為(46.06±18.44)s,異物取出時間(T2)為(177.10±65.87)s。圖6 為不同精度等級(X軸)的合格定位數(Y 軸)。精度等級為2.3 mm 時,P>0.1,兩組間無統計學差異,即該裝置的定位精度為2.3 mm(表1)。
3 討論
四肢深部金屬異物取出是一個令外科醫生頭痛的問題;準確的定位是取出異物的前提。影像學技術如透視、超聲及CT 是金屬異物的重要定位工具。透視輔助定位可以動態實時地對金屬異物進行定位[11],然而,其二維影像定位三維空間中的異物需要反復透視尋找,定位的精準度很依賴醫生的臨床經驗;超聲輔助定位可以同時定位金屬和非金屬異物[12],但超聲的分辨率較低,只能準確定位表淺的異物,對深部異物的定位效果不佳;CT 輔助定位系統將CT 圖像與導航設備相結合[7],是一種三維定位,術者可以更直觀地確定異物位置,但是該裝置存在CT 掃描誤差、配準誤差、術中影像漂移等缺點[6]。
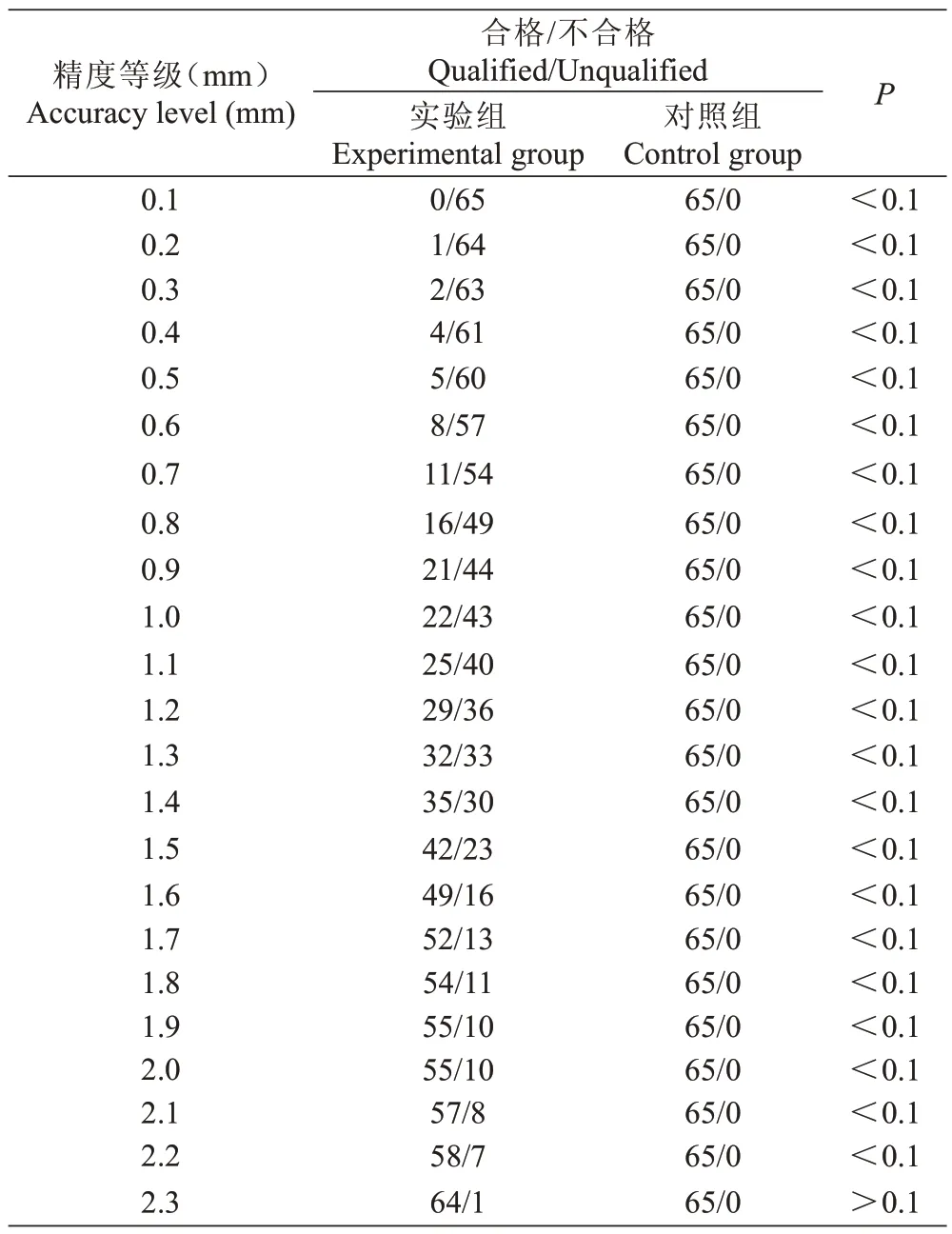
表1 不同精度等級的實驗組與對照組的卡方檢驗Tab.1 Chi-squared test between the experimental group and the control group at different accuracy levels

表2 不同定位技術取出金屬異物的指標比較Tab.2 Comparison of different methods for extraction of metallic foreign bodies
以上傳統的定位裝置是用異物的取出率來評價定位效果,對定位的精度沒有進行討論,因此,難以直觀、全面地認識和評價其手術效果。本研究測量了定位異物的實際偏差距離(D2),并將實驗組與理想定位結果進行比較,當P>0.1 時,對應的精度等級即為定位裝置的定位精度,這樣可以更細致地量化評價該裝置的定位效果。定位裝置精度為2.3 mm,可以滿足臨床對異物定位的準確度要求。異物中心的坐標設為(X,Y,Z),垂直位透視確定X,Y 軸上的位置,水平位透視確定Z 軸上的坐標,通過兩次的二維定位即可完成對三維空間中異物的定位。
輻射的生物效應包括隨機效應和非隨機效應。隨機效應沒有閾值劑量,即使低水平的輻射也會發生。長期或大量X 線輻射可增加皮膚癌、甲狀腺癌、白內障和血液系統疾病的發病率[13,14]。據報道,法國每年約有2300 例癌癥與診斷性電離輻射有關,占所有新發癌癥病例的0.7%[15];韓國每年有1915 例癌癥病例和637 例癌癥死亡病例與醫療輻射有關,占所有新發癌癥病例發病率和死亡率的0.9%[16]。因此,臨床操作中應盡量減少輻射暴露。然而,傳統的定位裝置通常使患者和醫生暴露在大劑量的輻射下,以往定位異物的平均透視時間為2 min[11]。利用本文新的定位裝置,醫生可以在手術室外調控三軸平移滑臺的運動來定位異物而避免暴露在X 線輻射下;患者的透視時間為(46.06±18.44)s,輻射暴露時間縮短。本定位裝置與其它定位技術取出金屬異物的比較見表2。微創不僅是指手術切口小,更為重要的是避開血管及神經等重要結構。本研究設計了可拆卸的定位臂,當定位臂插入不同的凹槽時,定位孔的軸線均相交于定位裝置的中心。因此,在置入定位針前,可以根據解剖結構及手術入路的需求,選擇安全的區域,調換定位臂的位置,使術者在安全的區域操作,避免血管和神經損傷的并發癥發生。
該定位裝置存在不足之處:C 型臂透視顯示范圍較局限;定位底座及定位臂采用3D 打印的制造工藝,制造精度存在微小誤差;定位針在定位穿刺中因有組織阻礙,會造成微小變形,造成微小誤差。
本定位裝置是在C 型臂引導下定位并取出異物,除了金屬異物,所有的不透X 線的異物(金屬、玻璃、小石子等)可以用本設備定位并取出。另外,此設備是一個點定位裝置,能夠準確地定位三維空間中的一個點,其應用范圍還有大的提升空間,后續將進一步研究用于其他需要點定位的手術導航,如全身各部位的穿刺活檢、精準置釘以及椎間孔定位等。