基于對流云/層狀云劃分的云分析方法改進
2021-04-14 06:58:44陳鋒董美瑩冀春曉
大氣科學 2021年2期
關鍵詞:分析
陳鋒 董美瑩 冀春曉
浙江省氣象科學研究所,杭州310008
1 引言
模式中濕物理過程對降水預報有著至關重要的作用。而在模式背景場中,云水物質往往與實況差異較大,尤其是傳統的“冷啟動”方式生成的初始場,一般僅包含溫度場、濕度場、氣壓場和水平風場,而云水物質等非絕熱參數則需要通過模式積分逐步調整生成(Donner,1988;王瑾和劉黎平,2009)。這種模式“起轉(spin-up)”問題會導致初期模式降水明顯滯后于實況出現,造成較大偏差。
近年來,利用衛星及多普勒雷達資料開展復雜云分析應用,為解決模式spin-up問題提供了很好的途徑。復雜云分析是以模式預報或初始分析場為背景場,基于物理定理和經驗關系建立觀測資料與背景場中各要素之間的關系,更新構建更符合實際的網格尺度初始云水物理場,以緩解數值模式云水物質的spin-up問題,從而改進模式預報結果的一種方法(Albers et al.,1996;Zhang et al.,1998)。比如,Lin et al.(1993)利用LAPS(Local Analysis and Prediction System)系統開展資料融合及云分析,改進了初始場信息并明顯改善了短時(0~6 h)降水的預報結果。Zhang et al.(1998)和Zhang(1999)借鑒LAPS云分析系統,發展了ADASARPS[(Advanced Regional Prediction System) Data Assimilation System]系統(其中的云分析模塊又被稱為ARPS對流云方案),并通過分析吸收雷達反射率因子,改進了模式初始場中的云過程、水凝物及其混合比。Xue et al.(2003)利用ADAS系統證明了雷達資料的引入能有效縮短模式的spin-up時間。Hu et al.(2006)改進了ADAS云分析系統,并利用雷達反射率資料反演了初始場中的云水物質,并調整了云內溫度和濕度,有效改進了模式對龍卷風暴單體的模擬。Weygandt et al.(2006)提出了直接基于云內格點物理量進行云水、云冰含量估計的云分析方案,并在RUC(Rapid Update Cycle)系統(Benjamin et al.,2004,2007;Alexander et al.,2010)中得到應用(被稱為RUC層云方案)。近年來應用廣泛的GSI(Gridpoint Statistical Interpolation,Hu et al.,2015)系統則包含了ARPS對流云方案和RUC層云方案,但因缺乏對流判據,無法同時使用。
在國內,也有較多學者利用LAPS、ADAS、RUC等云分析方案開展研究(盛春巖等,2006;屈右銘等,2010;胡金磊和郭學良,2013;程興宏等,2014;王洪等,2015;薛諶彬等,2017)。業務上,以北京和上海氣象局為代表的業務單位研制了各類快速更新循環同化數值預報系統(陳敏等,2011;雷蕾等,2012;陳葆德等,2013;邱金晶等,2015),這類系統針對強對流短時臨近預報而設計,但在模式spin-up過程中或多或少都存在一定問題。朱立娟(2012)利用GRAPES(Global/Regional Assimilation and Prediction System)短時臨近預報模式系統開展檢驗時發現,該系統中的ADAS云分析模塊計算的水凝物含量比衛星觀測值偏高。李佳等(2017)也在上海的業務系統應用過程中發現了類似的問題,并分析這種初始水凝物偏高與模式物理方案的不協調,是引起積分初始階段模式調整劇烈和降水量偏大的根本原因。造成水凝物分析結果偏高的主要原因與ARPS對流云方案的設計有關,該方案是針對于深對流系統設計的,在非對流格點上使用該方案分析會導致分析所得的水凝物含量偏高。因此,李佳等(2017)根據地表感熱和潛熱通量確定對流尺度速度作為對流判據,在ADAS中增加了層云方案,對不同類型的格點分別采用對流云方案和層云方案計算云水、云冰,顯著減輕了模式初始階段的云水、云冰過量問題,提高了降水的預報能力。然而,該方法提出的對流判據的準確性依賴于模式對感熱和潛熱通量模擬的準確性。
目前,較為常用的對流云—層狀云劃分一般考慮地面降水強度(Churchill and Houze, 1984;Caniaux et al.,1994)、上升速度(Tao and Simpson,1989;Tao et al.,1993,2000;Xu,1995;Houze, 1997)、相對濕度(Tao et al.,1993;Chin,1994;Alexander and Cotton,1998)、雷達反射率(Steiner et al.,1995)等因素,其中地面降水強度和雷達反射率相對易于觀測和獲取。Lang et al.(2003)對比了六種不同劃分方案后指出,不同方案間的定性劃分結果是一致的。因此本文擬采用地面降水強度和雷達反射率作為判別因子,構建一種基于觀測數據的對流云—層狀云劃分方法,并將其應用于GSI云分析系統中。針對2019年梅雨期間的一次混合云降水過程,分別采用純層云方案(ST 方案),純對流云方案(CU 方案),基于地表感熱、潛熱通量確定對流尺度速度作為對流判據的混合方案(CSW 方案),以及本文新提出的基于地面降水強度和雷達反射率劃分對流云/層狀云作為判據的混合方案(CUST方案),進行循環同化對比試驗。通過對流格點分布、云水云冰物質變化和降水的分析,探討新方案對云分析結果和降水預報的影響。本文的內容安排如下:第2節介紹了云分析方法的改進及個例,第3節概述了觀測數據和數值試驗設計方案。改進后的云分析方法的驗證及其對模擬結果的影響在第4節進行了分析。第5節是結論與討論。
2 云分析方法改進和個例選取
2.1 GSI 云分析系統
云分析是使用觀測資料和模式的初始分析場,通過物理定律和經驗關系,構造出網格尺度的初始云水物理場,以緩解數值模式云水物質的spin-up問題,使模式積分的早期結果更接近于實況(Albers et al.,1996;Zhang et al.,1998)。其基本思路是:首先利用觀測計算云覆蓋區域,在區域內計算云凝結物(云冰和云水)含量;再利用反射率因子計算水物質(雨、雪和雹)含量;進而調節溫度和水汽場。目前,GSI中同時包含了兩個較為成熟的方案:ARPS對流云方案和RUC層云方案。對于云凝結物(云冰和云水)含量的計算,ARPS對流云方案的計算在云內,即將云從云底到云頂細分為多層,逐層通過計算溫度、氣壓和飽和水汽壓求得飽和水汽混合比,然后計算相鄰兩層飽和水汽混合比之差作為基本的云水和云冰的增量或減量,最后依據環境溫度分離云冰和云水含量;而RUC層云方案的計算在模式層上,先分別計算格點液面和冰面的飽和水汽混合比,再根據溫度確定權重求取格點上云滴粒子混合比的加權平均,最后按溫度權重系數分離出云水和云冰。對于水物質(雨、雪和雹)含量的計算,ARPS對流云方案和RUC層云方案均是在先確定降水類型后,再根據不同的微物理方案[如KRY 方案(Kessler,1969)或Lin 方案(Ferrier,1994)或Thompson 方案(Thompson et al., 2004)]計算云內雨、雪和雹粒子的含量。對于云內的溫度調節,ARPS對流云方案采用濕絕熱過程,將云從云底到云頂細分為多層,利用Smith-Feddes方案(Albers et al.,1996)計算得到的每層云內溫度計算位溫,進而計算與模式背景位溫差并根據垂直速度進行適當調整;而RUC層云方案采用干絕熱過程,在模式層上直接計算位溫并進行調整。對于水汽調節,ARPS對流云方案同時根據格點雷達反射率觀測和云量調整;而RUC層云方案則根據云量進行調整。總的來說,ARPS對流云方案與RUC層云方案的最大區別在于:RUC 層云方案的計算不考慮云的垂直結構即垂直方向的聯系,而直接以模式層格點的物理量來估計云凝結物含量和調整云內溫度;ARPS對流云方案的設計主要用于深對流系統,而RUC方案更適用于層狀云降水系統。
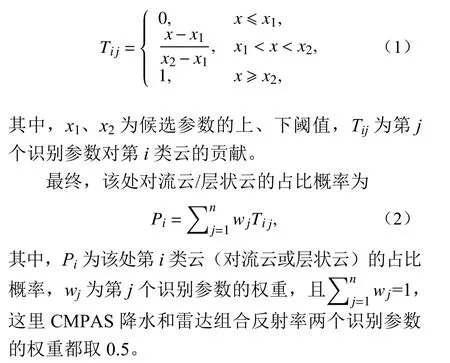
2.2 基于對流云/層狀云劃分的云分析方案改進
GSI 云分析系統在結合背景場和觀測資料完成三維云場的構造后(即確定云底、云高與網格云量),首先進行云滴粒子質量濃度的估計。由于缺乏對流判據,原始系統在計算云水、云冰含量時,只能選擇ARPS對流云方案或RUC層云方案中的一種,這顯然與實際情況有較大差異。李佳等(2017)根據地表感熱和潛熱通量確定對流尺度速度(convective-scale velocity)作為對流判據,來劃分對流云和層狀云(簡稱為CSW 方案),但由于感熱和潛熱均來自于模式模擬,劃分結果存在模式依賴性,與實況存在一定差距。因此,本文對云分析方案的改進,主要在于引入一個基于可靠實況的對流云/層狀云判別因子,認為在同一云分析格點中同時存在一定概率的對流云/層狀云,通過判別因子可計算出每個網格點中屬于對流云/層狀云的概率(以下簡稱占比概率),對不同性質的對流云或層狀云分別采用ARPS對流云方案或RUC層云方案來分析,最終按占比概率加權得到云水、云冰的混合比。區別于CSW 方案中以絕對閾值劃分對流云和層狀云,新方案由于采用概率來描述每個格點中對流云和層狀云的占比,因此所求得的云水、云冰的混合比在空間上的變化相對CSW 方案較為平緩一些。新方案中,對流云/層狀云的占比概率計算較為關鍵,這里選擇易于觀測和獲取的地面降水強度和雷達反射率作為判別因子,采用模糊邏輯法來實現對對流云和層狀云的識別(簡稱為CUST方案)。具體步驟如下:(1)候選識別參數的獲取。為便于業務運行,這里選取國家氣象信息中心研制的中國多源降水融合系統2.1版本(CMPAS,CMA multisource precipitation analysis system,AS-Hourly V2.1)中的三源融合降水(潘旸等,2015,2018)和中國氣象局氣象探測中心研制的雷達反射率拼圖數據作為判別因子。CMPAS降水數據融合了CMORPH(CPC MORPHing technique)衛星降水估測資料、雷達QPE降水資料和地面站點降水資料,實時提供1 h、5 km 分辨率的降水產品。雷達反射率拼圖數據是在對單部雷達基數據做了定標、質量控制后,將全國天氣雷達組網拼圖的資料進行網格化、重疊區域處理,最終生成全國10 min、1 km 分辨率的反射率拼圖產品。(2)候選識別參數統計特征的獲取。由于不同的降水過程和不同的降水發展階段,對流云和層狀云對應的候選參數值(CMPAS降水值和雷達反射率值)的大小會有變化。理想的統計特征應該來自大量樣本,這里選取2019年5~7月的數據進行統計:首先選取統計時間段內的小時強對流樣本(觀測站點小時雨強大于20 mm h-1),共有11493個站次;其次從CMPAS和雷達反射率格點數據中提取出對應的降水值和反射率值;分別制作這些CMPAS降水和雷達反射率樣本的分布概率密度函數和累計概率密度函數(如圖1所示);最后選取90%和50%的累積概率對應的候選參數值作為對流發生的上下閾值。從圖1分析可以看到,CMPAS降水的上下閾值分別為8 mm h-1和16 mm h-1,雷達反射率的上下閾值為26 dB Z 和38 dB Z。Churchill and Houze(1984)指出,劃分對流云和層狀云的降水閾值可隨不同情況從10 mm h-1到25 mm h-1不等;Steiner et al.(1995)也認為雷達反射率超過40 dB Z 的點都應該是對流性降水。與已有研究相比,本研究得到的候選參數閾值應該是恰當的。(3)識別方法。由于候選參數存在相互交叉部分,選取一組固定參數閾值不能適用于各種情況下的層狀云和對流云識別,因此,這里選用模糊邏輯法(Fuzzy Logic Method;曹俊武等,2005;肖艷姣和劉黎平,2007)來實現。模糊邏輯法不追求云類型的具體的識別參數量值,而是將識別參數分為各種等級,根據寬松的分級原則,求得較為合適的結果,具有較強的擴充性和兼容性。這里采用基本形式為函數T 的隸屬函數系對這兩個識別參數進行模糊化。利用由2.2節中獲取的候選參數上下閾值,可最終獲得對流云的模糊基函數(圖2),根據這兩個模糊基函數可知:某個格點中,CMPAS降水小于8 mm h-1(雷達反射率小于26 dB Z)時,該處屬于對流云的概率為0(即全部為層狀云);CMPAS降水大于16 mm h-1(雷達反射率大于38 dB Z)時,該處屬于對流云的概率為100%(即全部為對流云);處于兩者之間時,該處屬于對流云概率的線性變化。具體的表達式如下:
2.3 個例選取

圖1 2019年5~7月基于對流云/層狀云劃分得到的(a)CMPAS降水量、(c)雷達反射率的概率密度,(b)CMPAS降水量、(d)雷達反射率的累積概率密度Fig.1 Probability density function(PDF)of(a)CMPAS(China Meteorological Administration multisource precipitation analysis system)precipitation and(c) radar reflectivity,and accumulated PDF of (b)CMPAS precipitation and(d)radar reflectivity obtained from the separation of the convective and cloud stratiform cloud from May to July 2019
選取2019年6月19日的一次梅雨過程作為試驗個例。6月17~21日受低空切變線影響,浙江省出現連續強降雨天氣,強降雨較為穩定,主要集中在浙中北地區,部分有暴雨局部大暴雨。浙江省快速更新同化業務系統(邱金晶等,2015)提前6 h 預報出了此次降水過程,對東西向雨帶的分布有較好的預報能力,6 h 的累計降水在30~60 mm,略小于實況,但臨近預報的降水量偏大,特別在起報后0~1 h 浙西北及紹興寧波地區,有空報強降水落區(圖略),這與朱立娟(2012)和李佳等(2017)指出的問題是一致的。
3 數值試驗方案設計
3.1 試驗配置
試驗以浙江省快速更新同化業務系統(Zhejiang WRF-ADAS Rapid Refresh System,ZJWARRS;邱金晶等,2015)的系統框架為基礎,選用WRF-ARW V3.7.1(http://www2.mmm.ucar.edu/wrf/users[2020-05-07];Skamarock et al.,2008)作為預報模式,GSI-3DVAR V3.4(Hu et al.,2015)作為資料同化系統,研究區域以(32°N,117°E)為中心,兩層嵌套網格,分辨率分別為9 km 和3 km,網格數分別為265×265 和205×187,網格參數與業務版本相同(圖3)。微物理方案采用Thompson方案(Thompson et al.,2008),輻射傳輸方案采用RRTMG 方案(Iacono et al.,2008),表層方案采用修正的Monin-Obukhov 方案(Jiménez et al.,2012),邊界層方案采用YSU 方案(Hong et al.,2006),陸面方案采用Noah 方案(Chen and Dudhia,2001),不采用積云參數化方案。試驗從2019年6月19日08時(北京時,下同)冷啟動,初始背景場資料由GFS(Global Forecast System)模式每3 h 間隔的0.5°×0.5°實時預報資料(www.nco.ncep.noaa.gov/pmb/products/gfs[2020-05-07])通過WPS(WRF Preprocess System)初始化模塊插值獲取,其他時刻同化的背景場則由本系統上一時次的1 h 預報場提供,側邊界全部由GFS資料提供,具體流程如圖4所示。

圖2 基于函數T 的識別參數(a)CMPAS降水量、(b)雷達反射率的模糊基函數Fig.2 Fuzzy setting based on function T for the separation parameters:(a)CMPASprecipitation;(b)radar reflectivity
3.2 觀測資料
本研究用于同化的觀測資料包括常規資料、多普勒雷達資料和風云衛星二級產品數據。常規資料主要來自于NCEP提供的Global Data Assimilation System(GDAS,www.emc.ncep.noaa.gov/gmb/gdas[2020-05-07])觀測數據,包括地面天氣站點報(SYNOP)、機場地面報(METAR)、船舶和浮標觀測(SHIP+BUOY)、全球GTS探空觀測數據(Rawinsonde)、飛機報文觀測(AMDAR)、衛星云導風(SATWND)等常規觀測資料。雷達基數據資料主要來自于浙江省氣象信息網絡中心提供的浙江省內的8部多普勒SA/SB波段雷達的觀測數據,包括衢州、麗水、金華、杭州、湖州、寧波、臺州、舟山,其觀測要素為雷達反射率因子和徑向速度。風云衛星數據來自于國家衛星氣象中心風云衛星遙感數據服務網,包括風云4A 衛星的云檢測、云頂高度、云頂氣壓和云頂溫度資料。另外,浙江省及其周邊區域約4000多個地面自動站的小時降水將用于驗證模擬效果,其站點平均空間分辨率為6~7 km。已有研究表明,在較高空間密度情況下,不同插值方法對結果影響有限(Ikeda et al.,2010;許孌等,2017)。因此,在定量評估降水時,本研究采用簡單易行的反距離權重方法將站點數據插值到模式格點上。

圖3 浙江快速更新同化系統的模擬區域,彩色陰影表示地形高度(單位:m)Fig.3 Simulation area of Zhejiang WRF-ADAS(Weather and Forecast Research, ARPS(Advanced Regional Prediction System)Data Assimilation System) rapid refresh system,shadingsrepresent terrain height (units:m)
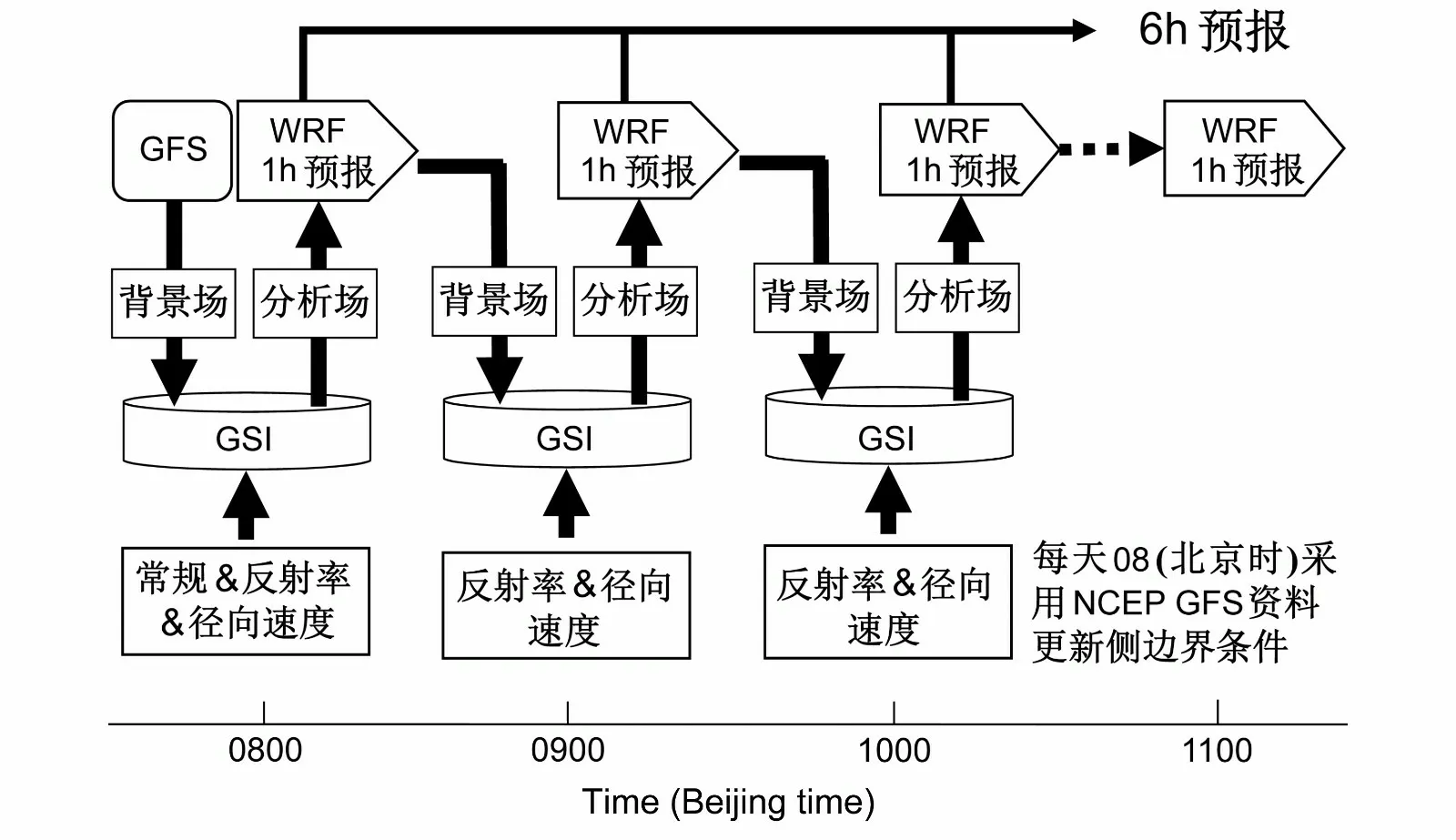
圖4 循環同化流程示意圖Fig.4 Flowchart of thecycling assimilation system
3.3 試驗設計
為探討新改進的混合云分析方案對本次過程預報的影響,本研究設計了4個數值試驗,分2組分析(表1)。(1)層云方案試驗(ST):WPS從GFS資料插值處理得到2019年6月19日08時的插值場作為初始背景場,并在08時由GSI-3DVAR(threedimensional variational data assimilation)同化GDAS常規資料和雷達徑向速度,采用RUC層云方案進行云分析,然后以得到的分析場作為初始場,向前積分預報6 h 至14時。此后的循環,均以前1 h的預報場作為背景場,由GSI-3DVAR 同化雷達徑向速度并采用RUC層云方案進行云分析,然后以得到的分析場作為初始場,向前積分預報6 h。(2)對流云方案試驗(CU):同ST 試驗,但采用的是ARPS 對流云方案做云分析。(3)新改進的混合云分析方案試驗(CUST):同ST試驗,但采用的是基于CMPAS降水和雷達反射率的模糊邏輯法的混合云分析方案做云分析。(4)基于對流尺度速度的云分析方案試驗(CSW):同ST 試驗,但采用的是基于地面感熱和潛熱通量的對流尺度垂直速度法的混合云分析方案做云分析。

表1 數值試驗配置方案Table1 Configuration schemesof experiments
將ST、CU 和CUST試驗作為第一組試驗,用于對比改進后的混合云分析方案與純層云方案和純對流云方案的差異及其對模擬結果的影響。將CSW 與CUST 試驗作為第二組試驗,用于比較不同對流云/層狀云劃分方案對云分析結果及模擬結果的影響。
4 模擬結果分析
為探討不同云分析方案對模擬結果的影響,本文主要從云分析結果的差異、不同云分析方案對降水模擬結果的影響這兩個方面開展對比分析。
4.1 對流云/層狀云劃分方法檢驗
在改進的云分析方案中,對流云和層狀云的劃分起到了至關重要的作用。圖5給出了2019年6月19日09時,分別根據CMPAS降水、雷達反射率和同時考慮兩者的模糊邏輯法劃分得到的對流云占比概率的分布。表2給出了三種劃分方法與實況對流云(實況小時降水大于20 mm h-1的站點)分布的定量統計結果,可以看到采用模糊邏輯方法的準確率最高(0.95),僅根據CMPAS降水劃分的方法次之(0.94),僅根據雷達反射率劃分的方法最低(0.92)。模糊邏輯方法有效較低了僅根據雷達反射率劃分時帶來的空報現象(空報率從0.52下降到0.09),同時也降低了僅根據CMPAS降水劃分時帶來的漏報現象(漏報率從0.73下降到0.56),與實況更為一致。雖然三種劃分方法均識別出了浙中北地區東西向的強對流區域,但是僅依據CMPAS降水劃分的對流云分布明顯偏小,而僅依據雷達反射率劃分的對流云分布明顯偏大,依據模糊邏輯法劃分的對流云,既包含了主要強對流區域,也覆蓋了強對流周邊區域,對流云面積大小較為恰當。
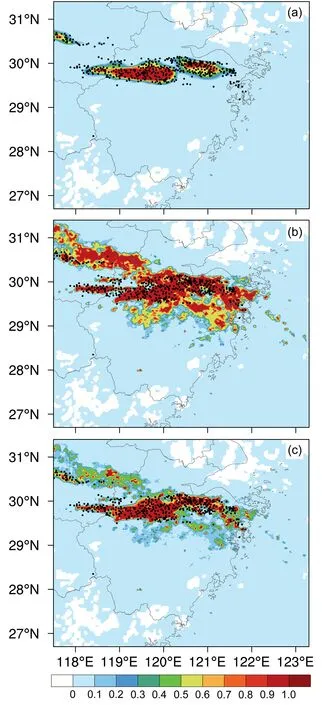
圖5 2019年6月19日09時根據(a)CMPAS降水方法、(b)雷達反射率方法、(c)模糊邏輯方法劃分的對流云占比分布。黑點表示觀測降水量大于20 mm h-1的站點Fig.5 Proportions of convective cloud according to(a)CMPAS precipitation method,(b)radar reflectivity method,(c)fuzzy logical method at 0900 BJT(Beijing time)19 June 2019.Black points denote theobservation stationswith precipitation exceeding 20 mm h-1
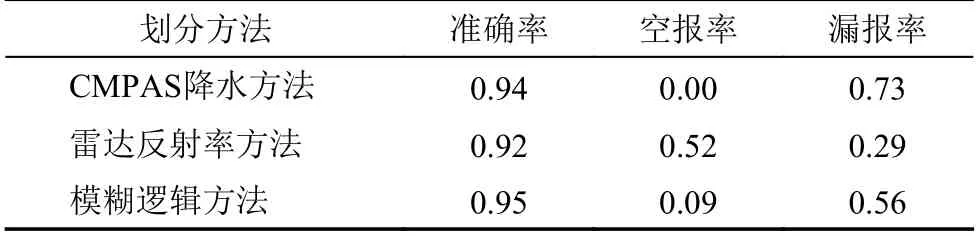
表2 對流云/層狀云劃分方法檢驗統計Table 2 Test statistics of the division method for c onvective cloud and stratiform cloud
4.2 對云水、云冰分析的影響
不同方案對分析結果的影響表現在對云水、云冰含量的反演。圖6給出了2019年6 月19 日09時ST 試驗、CU 試驗及CUST試驗分析得到的云水、云冰垂直累積量的水平分布。可以看到,三個試驗分析得到的云水、云冰物質主要呈東西向分布在浙中北部及安徽東南部,這與雷達反射率和強對流區域的分布是一致的(圖5b)。但三個試驗分析得到的云水、云冰含量大小有較大差距,其中,ST 試驗的分析結果最小,在整個區域內均處于0.2~2 kg m-2;CU 試驗的分析結果最大,在整個降水區域內都存在不低于4 kg m-2的云水、云冰總量;而CUST試驗的分析結果介于ST 試驗和CU試驗之間,在判定為對流云的區域,保留了CU 試驗對流特征,云水、云冰總量在4~14 kg m-2,而在判定為層狀云的區域,保留了ST 試驗的層云特征,云水、云冰總量在0.2~4 kg m-2。

圖6 不同云分析試驗方法分析得到的2019年6月19日09時的云冰、云水含量垂直累積量的水平分布(單位:kg m-2):(a)ST試驗;(b)CU 試驗;(c)CUST 試驗Fig.6 Horizontal distributions(units:kg m-2)of vertically integrated cloud ice content and cloud water content from different cloud analysis experiments at 0900 BJT 19 June 2019:(a)Experiment ST(stratiform cloud analysis);(b)experiment CU(convective cloud analysis);(c)experiment CUST (improved hybrid cloud analysis)
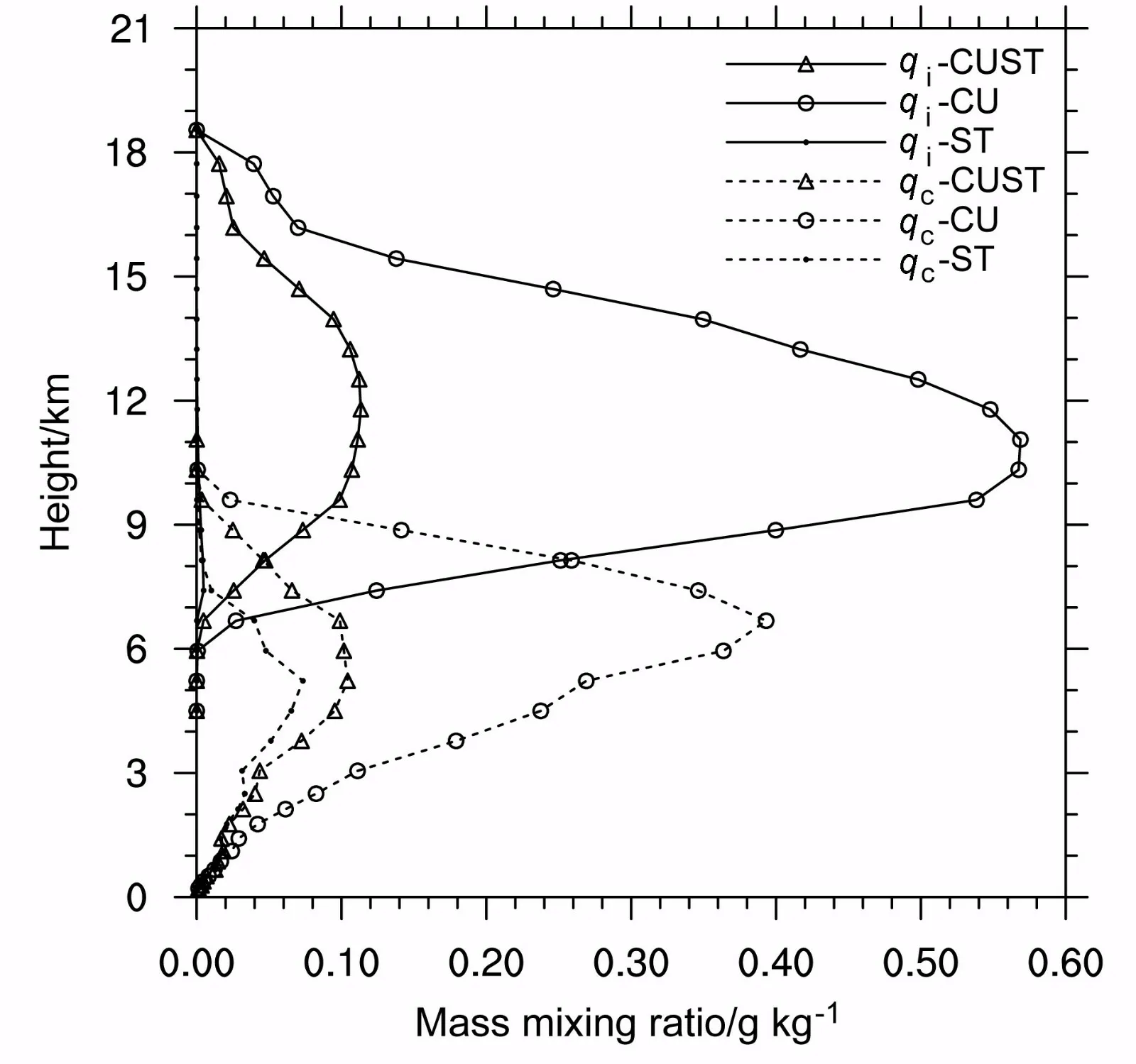
圖7 2019年6月19日09時不同云分析試驗方法分析得到的格點平均云水(q c)質量混合比和云冰(q i)質量混合比的垂直分布(單位:g kg-1)Fig.7 Vertical distributions(units:g kg-1)of grid-averaged cloud ice(q i)mass mixing ratio and cloud water(q c)mass mixing ratio obtained from different cloud analysismethods at 0900 BJT 19 June2019
圖7進一步給出了2019年6月19日09時ST 試驗、CU 試驗及CUST 試驗分析得到的區域格點平均云水、云冰混合比的垂直分布。可以看到,三個試驗分析得到的云水均分布在11 km 以下,云冰均分布在6 km 以上,在6~11 km 是云水、云冰共存的區域,但從量值上來看有較大差異。ST試驗分析的云水、云冰含量最低,云水含量約為CU試驗的1/4,云冰含量約為CU 試驗的1/10;而CUST 試驗分析的云水、云冰含量居于ST試驗和CU 試驗之間。從峰值來看,ST 試驗云水、云冰含量的峰值分別出現在5 km 和8 km 處,CU 試驗的峰值出現位置略高于ST試驗,分別出現在6.5 km和11 km 處,而CUST 試驗居于兩者之間。另外,無論是從云水、云冰的水平分布(圖6),還是從垂直分布(圖7)上,都可以明顯看到ST試驗分析得到的云水物質分布連成一片,階梯變化較小,而CU 試驗則相對梯度更大。這是由于RUC層云方案計算始終在模式層上,加上在計算云物質總量的事后附加了上限,云分析得到的云水物質場梯度不明顯;而ARPS對流云方案將云從云底到云頂細分為多層,計算每層云水物質場的分布后再插值到模式層,因此分析得到的云水物質量值較大且梯度相對明顯。CUST 試驗依據對流判別因子,融合了RUC層云方案和ARPS對流云方案,在強對流區分析的云水、云冰含量高,保留了對流特性,而在非對流區云水、云冰含量低,保留了層云特性。新方案使分析得到的云水、云冰含量的空間分布相對更為合理。
4.3 對降水的影響
初始云水物質場的變化,將直接影響短時降水的模擬。由圖8可見,三個試驗模擬的2019年6月19日09時起報的1 h 累計降水分布形態相似,均呈東西向分布,但在量級上ST 試驗降水最小,CU 試驗最大,CUST 試驗居于兩者之間。從降水差異圖上可以看到,CUST 試驗比ST試驗在浙江中北部強對流區域模擬了更多的降水(圖8e),而比CU 試驗在非強對流區域模擬了較少的降水(圖8f)。這表明,新方案能在保留ARPS對流云方案在強對流區域的強降水模擬的同時,較大程度改進了該方案在非對流區域的偏濕、降水偏大的不足。

圖8 2019年6月19日10時的1 h 累計降水量(單位:mm):(a)ST 試驗;(b)CU 試驗;(c)CUST 試驗;(d)觀測;(e)CUST試驗與ST 試驗的差異;(f)CUST 試驗與CU 試驗的差異Fig.8 1-h accumulated precipitations(units:mm)at 1000 BJT 19 June 2019:(a)Experiment ST run;(b)experiment CU run;(c)experiment CUST run;(d)observation;(e)experiment CUST run minus experiment ST run;(f)experiment CUST run minus experiment CU run
對起報后3 h 內逐10 min 累計降水進行的定量評估顯示,新方案對模擬結果的改進明顯(圖9)。ST、CU 和CUST試驗模擬降水的小雨量級(≥0.1 mm)的平均ETS評分分別為0.315、0.294和0.318;大雨量級(≥3.0 mm)的平均ETS評分分別為0.018、0.022和0.027。這是由于ST試驗中RUC層云方案分析的對流區域云水、云冰偏小,導致ST試驗對大雨量級預報ETS評分較低;CU試驗中ARPS對流云方案分析的非對流區域云水、云冰物質過多,導致CU 試驗對小雨量級預報ETS評分較低;而CUST 試驗結合兩者優勢,所以對小雨量級降水預報的ETS評分明顯高于CU試驗,而對大雨量級降水預報的ETS評分明顯高于ST試驗,取得了綜合評分最好的結果。需要指出的是,云分析對降水的影響主要集中在模式起報的初始時期(6 h 甚至3 h 內),新方案對模式結果的改進也主要出現在模式起報初始階段。這和王洪等(2015)、李佳等(2017)的結論是一致的。
4.4 循環同化結果分析
圖10a 給出了2019年6月19 日08~14 時的逐小時循環試驗中每次分析得到的對流格點(對流云概率大于50%的格點)占區域總格點數的比例變化。可以看到,CUST 試驗分析得到對流格點的比例在10%~20%不等,這與此次過程中梅雨鋒上對流活動強弱有關。圖10b顯示,ST 試驗分析得到的云水含量最小,在0.1~0.4 kg m-2之間略有變化;CU 試驗分析得到的云水含量最大,在0.9~1.7 kg m-2間變化,幾乎比ST試驗大一個量級;而CUST 試驗分析的云水含量在ST 和CU 試驗之間,且與對流格點的比例變化趨勢相一致。三個試驗分析得到的云冰含量情況與云水類似(圖10c)。
對起報后6 h 的逐小時累計降水開展定量評估顯示,新方法對模擬結果有一定程度的優勢(圖11)。在小雨量級,CUST 試驗的ETS得分明顯高于CU試驗,而空報率(False Alarm,FAR)明顯低于CU 試驗。這說明原有ARPS 對流云方案會使模式對小雨量級的降水有較大程度的空報,而CUST試驗增加引入層云方案,可有效降低小雨空報率。而在大雨量級,CUST 試驗的ETS評分和FAR 評分雖然也優于ST 試驗和CU 試驗,但其優勢并不十分明顯。這說明新方案對小雨量級的改進程度相比大雨量級要更為明顯。此外,也有一種可能是本次個例的對流區域范圍較小,導致新方案比層云方案的優勢未能充分體現。

圖9 2019年6月19日09~12時ST 試驗、CU 試驗、CUST 試驗模擬的逐10 min 累計降水量(a)≥0.1 mm、(b)≥3.0 mm 的ETS評分Fig.9 ETS(Equitable threat score)for 10-min accumulated precipitation(a)≥0.1 mm,(b)≥3.0 mm from experiments ST,CU,and CUST simulationsfrom 0900 BJT to 1200 BJT 19 June2019
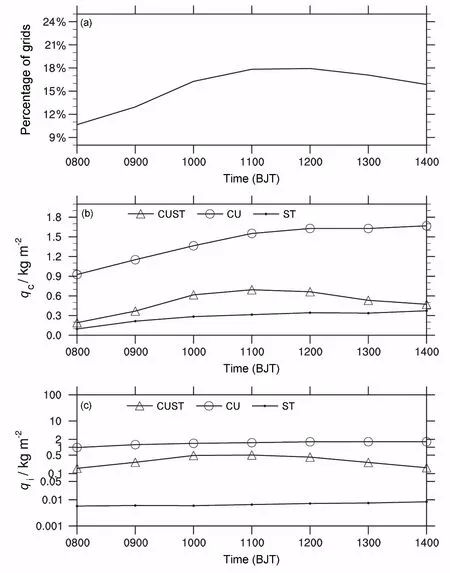
圖10 2019年6月19日08~14時的逐小時循環試驗中(a)CUST 方案分析得到的對流云格點數目占總格點數目的比例,ST、CU、CUST 三種方案分析的(b)云水質量混合比、(c)云冰質量混合比垂直累積的模式內層區域平均Fig.10(a)Percentage of convective cloud grids in total cloud grids obtained from the experiment CUST,vertically integrated(b)cloud water(q c) mass mixing ratio,(c)cloud ice(q i)mass mixing ratio obtained from hourly cycling experiments ST,CU,and CUST averaged in theinner model domain from 0800 BJT to 1400 BJT 19 June2019
4.5 新方案與CSW 方法的比較

圖13b、c給出了CSW 試驗和CUST 試驗分析得到的云水、云冰含量分布。可以看到,雖然兩個試驗分析的云水、云冰都集中在浙中北雨區,但與對流格點分布的相關性較大。CSW 試驗分析的云水、云冰含量主要分布于安徽東南部及浙江寧波地區,而CUST 試驗分析的云水、云冰主要分布于杭州紹興寧波地區的東西向區域。對比實時雷達回波(圖13a),CUST 試驗分析的云水、云冰含量的空間分布更具有可靠性。
沿雷達回波最強區域(直線AB)及其近似垂向區域(直線CD)分別取兩個剖面作進一步分析。由于CSW 試驗對直線AB區域對流區域的漏報,其分析的云水、云冰含量明顯偏小(圖14b),沿剖面的分布情況也與實況回波分布(圖14a)相差較大,而CUST 試驗分析的云水、云冰含量較大且分布更為合理(圖14c)。對于直線CD區域,CSW方法存在對CD區域對流的誤判,導致其分析的云水、云冰含量明顯偏大,而CUST分析的相對更為合理(圖14d-f)。
圖15給出了CSW 試驗及CUST 試驗模擬的2019年6月19日10時1 h 累計降水及其差異。對比實況觀測可以看到,CSW 試驗在安徽東南部、天目山區、及寧波地區存在明顯的降水高估現象,而在杭州地區的強降水中心附近存在明顯的低估。CUST 試驗對于上述降水高估和低估的區域,均存在一定程度的改善(圖15d),這與云水、云冰含量的改進區域是一致的,說明CUST試驗對降水的修正主要是由云分析方案對云水、云冰含量分析的改進造成的。
對模式起報后前3 h 的逐10 min 降水定量評估(圖16)可以看到,CUST 試驗對小雨以上(≥0.1 mm)量級降水的ETS評分比CSW 試驗有一定程度的提高,而FAR 評分則有一定程度的下降。這說明由于新方案基于實況融合降水和雷達反射率劃分的對流云—層狀云比CSW 基于模式前1 h 預報的感熱潛熱計算得到的劃分更為合理,分析得到的云水、云冰含量量級和分布也更接近實況,因此其模擬的降水評分也更高。這進一步證明了新方案的合理性。
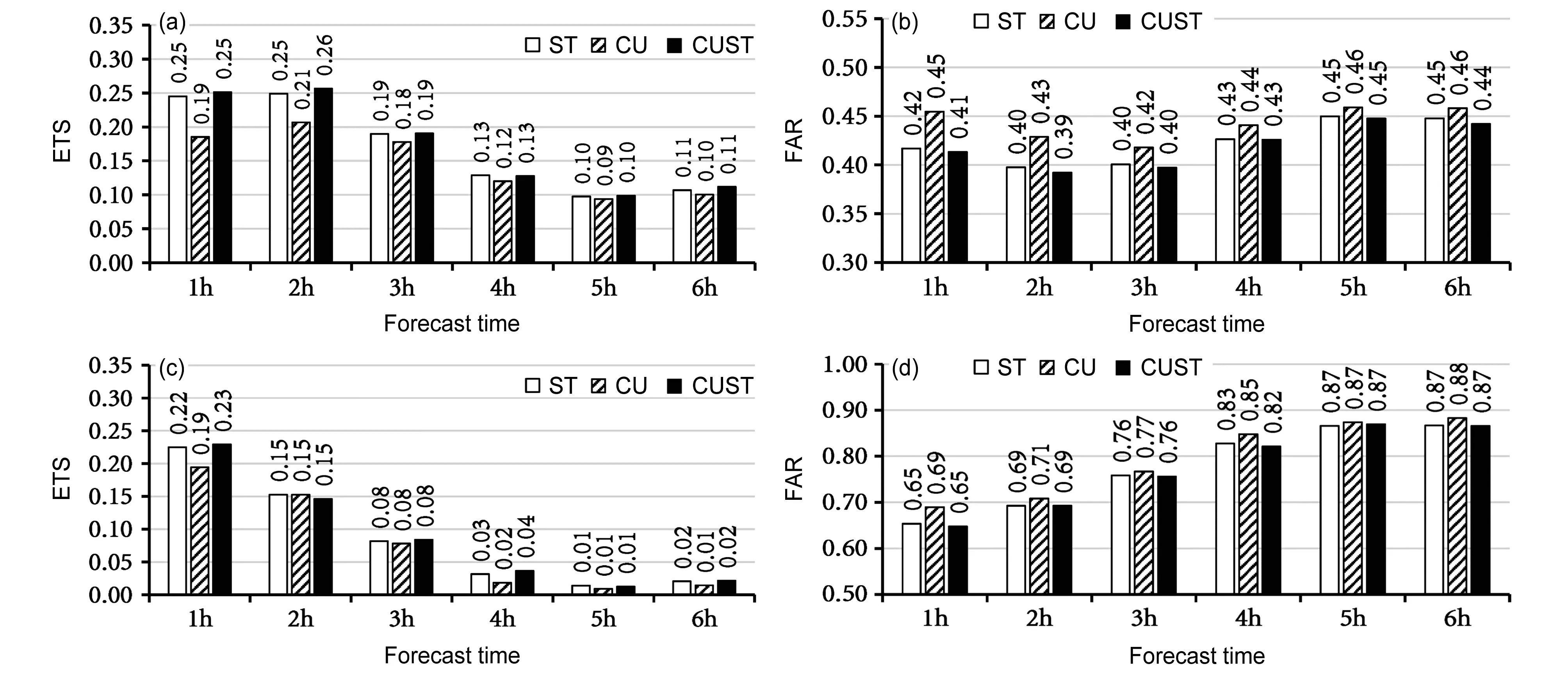
圖11 2019年6月19日08~14 時逐小時循環試驗中ST、CU、CUST 方案模擬的1 h 累計降水量(P)平均的(a)ETS評分(P≥0.1 mm)、(b)空報率(P≥0.1 mm)、(c)ETS評分(P≥3.0 mm)、(d)FAR 空報率(P≥3.0 mm)Fig.11 Averaged (a) ETS(1-h accumulated precipitation P≥0.1 mm), (b) FAR (false alarm, P≥0.1 mm),(c) ETS(P≥3.0 mm), (d) false alarm (P≥3.0 mm)obtained from hourly cycling experiments ST,CU,and CUST from 0800 BJT to 1400 BJT 19 June 2019

圖12 2019年6月19日09時(a)上一次循環模式預報的潛熱(單位:W m-2),(b)上一次循環模式預報的感熱(單位:W m-2),采用(c)CSW 方案、(d)CUST 方案分析得到的對流云所占比例分布。圖c、d 中的黑點表示觀測降水量大于20 mm h-1的站點Fig.12(a)Latent heat fluxes(units:W m-2)from the last cycle,(b)sensibleheat fluxes(units: W m-2)from the last cycle, proportions of convective cloud obtained from(c)the experiment CSW(Convective-scale velocity)and(d) the experiment CUST at 0900 BJT 19 June 2019.In Figs.c and d,black pointsdenote observation stationswith precipitation exceeding 20 mm h-1

圖13 2019年6月19日09時(a)雷達反射率(單位:dB Z),(b)基于CSW 方案、(c)基于CUST 方案分析得到的云水、云冰含量垂直累積的水平分布(單位:kg m-2)。直線AB、CD分別表示雷達回波最強區域(直線AB)及其近似垂向區域(直線CD)Fig.13(a)Radar reflectivity(units:dB Z),horizontal distributions(units:kg m-2)of vertically integrated cloud ice and cloud water obtained from (b)theexperiment CSW,(c)theexperiment CUST at 0900 BJT 19 June 2019.Lines AB and CD represent thestrongest radar echo region (line AB)and its approximatevertical region (line CD), respectively
5 結論與討論
本文選取了實況融合降水和雷達反射率因子作為劃分對流云和層狀云的判別因子,分析了兩個判別因子的閾值范圍,并采用模糊邏輯法提出了一個新的對流云/層狀云判別方法,基于該劃分方法改進了GSI 同化系統中的云分析方案。通過多組數值試驗的對比,分析改進前后的云分析方案對2019年6月19日浙江一次梅雨降水過程模擬的影響,探討了新方案的合理性和對模式預報的改進效果。主要結論如下:(1)基于實況融合降水(CMPAS)和雷達組合反射率,采用模糊邏輯法提出的對流云/層狀云判別方法,可較為準確地劃分對流云和層狀云,以此作為判別因子改進GSI同化系統中的云分析方案切實可行。(2)個例試驗表明,單純的對流云分析方案會明顯高估非對流區域的云水、云冰含量,導致模式積分前期降水量偏大;而單純的層云分析方案恰好相反,會明顯低估對流區域的云水、云冰含量,導致強降水區雨量偏小。引入對流云/層狀云判別因子后,新的云分析方案綜合了對流云分析方案和層云分析方案,在對流區域采用對流云分析方案,在非對流區域采用層云分析方案,減小了單純對流云方案在非對流區域的空報現象、以及單純層云方案在強對流區域的漏報現象,有效改進了降水的模擬。(3)改進后的云分析方案,對模式預報初期(6 h 甚至3 h 內)的改善效果較為明顯,且對小雨量級的降水改進幅度要優于大雨量級。(4)與CSW 方法相比,改進后的云分析方案基于實況資料劃分的對流云/層狀云更為合理,模擬的降水結果更優,說明該方法有較好的應用潛力。

圖14 2019年6月19日09時沿圖13 中直線AB(左)和直線CD(右)的垂直剖面:(a、d)觀測的雷達反射率因子(填色,單位:dB Z);(b、e)CSW 方案、(c、f)CUST方案分析的反射率因子(填色,單位:dB Z)、云水含量(藍色等值線,單位:g kg-1)、云冰含量(黑色等值線,單位:g kg-1)Fig.14 Vertical cross section along the line AB (left)and line CD(right)in Fig.13 at 0900 BJT 19 June 2019:(a,d)Observed radar reflectivity(shadings, units:dB Z); radar reflectivity(shadings, units:dB Z),cloud water content(blue contours,units:g kg-1),and cloud ice content(black contours,units:g kg-1)obtained from (b,e)theexperiment CSW,(c,f)theexperiment CUST
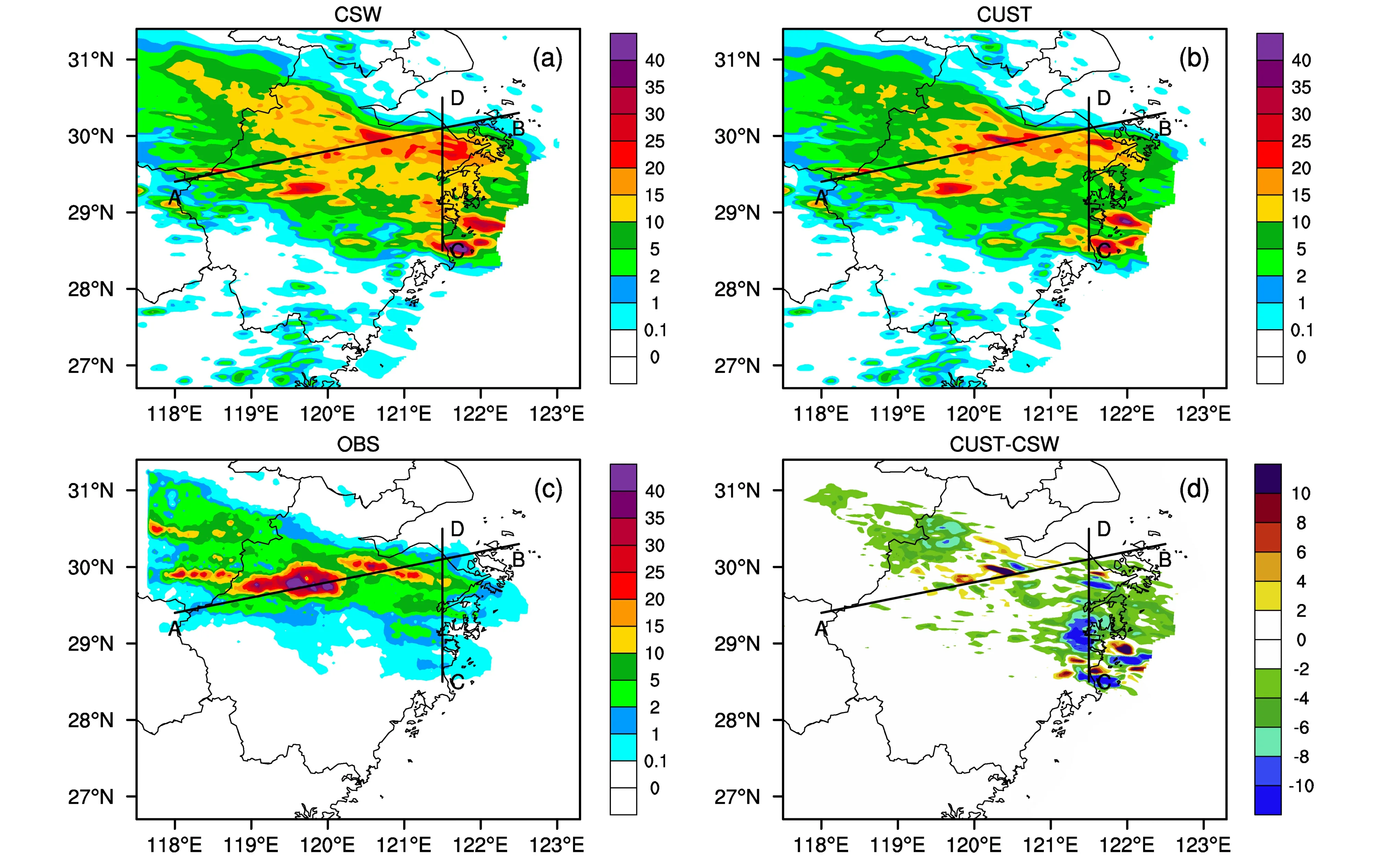
圖15 2019年6月19日10 時1 h 累計降水量(單位:mm):(a)CSW 試驗;(b)CUST 試驗;(c)觀測;(d)CUST 試驗與CSW試驗的差異Fig.15 1-hourly accumulated precipitations(units:mm)at 1000 BJT 19 June 2019:(a)Experiment CSW run;(b)experiment CUST run;(c)observation;(d)experiment CUST run minus experiment CSW run

圖16 2019年6月19日09~12時CSW 試驗和CUST 試驗模擬的逐10 min 累計降水量(≥0.1 mm)的ETS評分和FAR 評分Fig.16 Scores of ETSand FAR(false alarm)for the 10-min accumulated precipitation(≥0.1 mm)of experiment CSW run and experiment CUST run from 0900 BJT to 1200 BJT 19 June2019
綜上所述,基于對流云/層狀云劃分的混合云分析方法的改進能有效提高模式對降水的模擬性能。但需要指出的是,與CSW 方法相比,CUST方案需要更多的觀測(或再分析)資料,業務應用時需要統籌配合;CUST 方案中的識別參數閾值也會受到樣本數目、天氣過程和區域差異的影響,可能需要進一步通過細分季節和區域、增加樣本數量等方法提高對參數閾值的適用性。此外,CUST方案對小雨量級改進較大而對大雨量級改進不明顯,這一結論可能會受到個例選取的影響,對于有些受水汽條件影響更大的個例模擬,CUST 方法對大雨量級的降水的改進也許也會較大,這有待今后更多研究的開展和驗證。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06