怠速充電工況下的電池SOC平衡控制
2021-04-14 10:33:02莫崇相祁宏鐘
汽車工程 2021年3期
關鍵詞:發動機
莫崇相,吳 堅,祁宏鐘
(廣州汽車集團股份有限公司汽車工程研究院,廣州 511434)
前言
結合內燃機和電機的混合動力[1]是現階段車輛動力總成的發展趨勢之一。雖然目前混合動力的構型有多種形式,但無論何種構型都圍繞單電機或雙電機作為動力增加源[2]的范疇展開。而絕大多數的混合動力構型以及增程式電動車都存在發動機怠速充電工況。作為混合動力電能量儲存和釋放的關鍵部件,動力電池猶如一個能量調節中間裝置,因此怠速充電工況下電池的SOC 平衡性控制絕對是混合動力控制中必須要解決的關鍵性課題,其控制效果直接影響能量的利用效率和電池的安全性。特別在電池的SOC 達到電池極限時,怠速狀態下電池的SOC 平衡性控制[3]顯得至關重要。
1 混合動力怠速充電模型
為更好兼顧到混合動力各類構型所涉及的怠速充電工況的控制設計,現以市場上具有代表性的P2混合動力單電機混合動力構型和某雙電機的混合動力構型來設計怠速充電過程電池SOC的平衡性控制。
考慮到該兩種混合動力的構型在怠速充電工況下轉動慣量和速比不同,在本文混合動力總成模型中引入怠速充電的等效轉動慣量JSER和怠速充電時發動機至電機的速比iEM1。該兩種混合動力模型如圖1 和圖2 所示,圖中相關模型參數如下:Je為發動機轉動慣量;Jp為車輪至雙離合器端等效到輸入軸上的轉動慣量;Jk為K0 離合器轉動慣量;Jc為雙離合器轉動慣量;Jm為電機轉動慣量;JSER為增程模式發動機至電機等效轉動慣量;JR為怠速耦合部件的轉動慣量;Te為飛輪端轉矩;Tk為K0 離合器轉矩能力;Tr為K0 離合器處等效殘余轉矩;Tt為傳遞到車輛端轉矩;Tm為電機1 的實際輸出轉矩;ωe為發動機轉動角速度;ωk為K0 離合器轉動角速度;ωm為電機轉動角速度;ωp為雙離合器轉動角速度;ωW為車輪轉動角速度;τ 為總傳動比;iEM1為發動機至電機1的速比;iEM2為電機2 至差速器的速比。
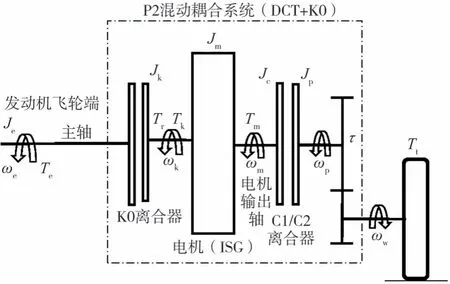
圖1 單電機混合動力總成模型
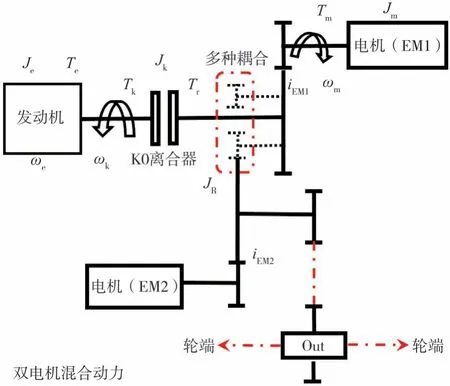
圖2 雙電機混合動力總成模型
在模型中發動機的轉矩其實包括兩部分:一部分為發動機怠速時表示凈輸出驅動電機發電轉矩,這也是怠速充電所需發動機控制輸出目標;另一部分為發動機運轉時發動機本身產生的各種摩擦阻力轉矩[4]。對于混合動力來說,混合動力控制單元一般只關心參與動力凈輸出的發動機轉矩或功率,而發動機內部的摩擦轉矩或阻力功率則交由發動機自身控制完成。另外,針對以上兩種構型的混合動力在怠速充電工況還須計算出其參與到怠速充電工況下的等效轉動慣量。
單電機構型的等效轉動慣量:

雙電機構型的等效轉動慣量:

2 電池SOC平衡控制目標計算
2.1 怠速充電SOC平衡控制設計
從上述兩種混合動力構型來講,車輛靜置狀態怠速充電在達到電池SOC 控制平衡點附近時,混合動力會根據電池的SOC 值來判斷進行電池功率平衡性控制。但在發動機未停機的情況下,想完全控制發動機和電機精確提供車輛的附件功率難以做到。為此針對此工況一般做法都是將電池作為儲能裝置在允許的能量波動范圍內動態調節動力總成的怠速充電凈輸出功率來完成電池SOC 平衡控制。而本文中則是通過分析電池的充放電功率進行設計,主動讓電池進行過放和過充的間隔交替變化來動態調節動力總成的怠速充電功率。另外,怠速充電附件功率一般包括12 V 低壓電池充電的DCDC 電功率和電動空調所使用的電功率,即P附件=PDCDC+P空調。
本文中動力計算的分析只圍繞SOC 平衡性控制前涓流恒流充電、電池過放階段和電池過充階段的控制而展開。具體過程的控制設計如圖3 所示。其中,W、CB、CC、CM、PB、PC、PM、E、M、S 分別表示電池能量、電池電流、充電電流、電機電流、電池電功率、充電電功率、電機電功率、發動機轉矩、電機轉矩、發動機或電機轉速曲線,字母后的數字表示曲線上各點的位置。
根據圖3 中設計的5 個控制階段的劃分,下面針對各階段控制節點說明并給出相應的控制目標。
怠速涓流充電階段 這一階段主要是對在達到電池SOC 平衡控制前的涓流充電控制,其主要以小電流的恒流[5]充電。
電池能量過放切換階段 這一階段是達到電池SOC 控制目標后,將電池能量的充電狀態切換成過放狀態的切換過程。
電池能量持續過放階段 這一階段將以穩定的狀態使電池能量持續進行過放以降低電池能量,至控制目標允許過放最低值。
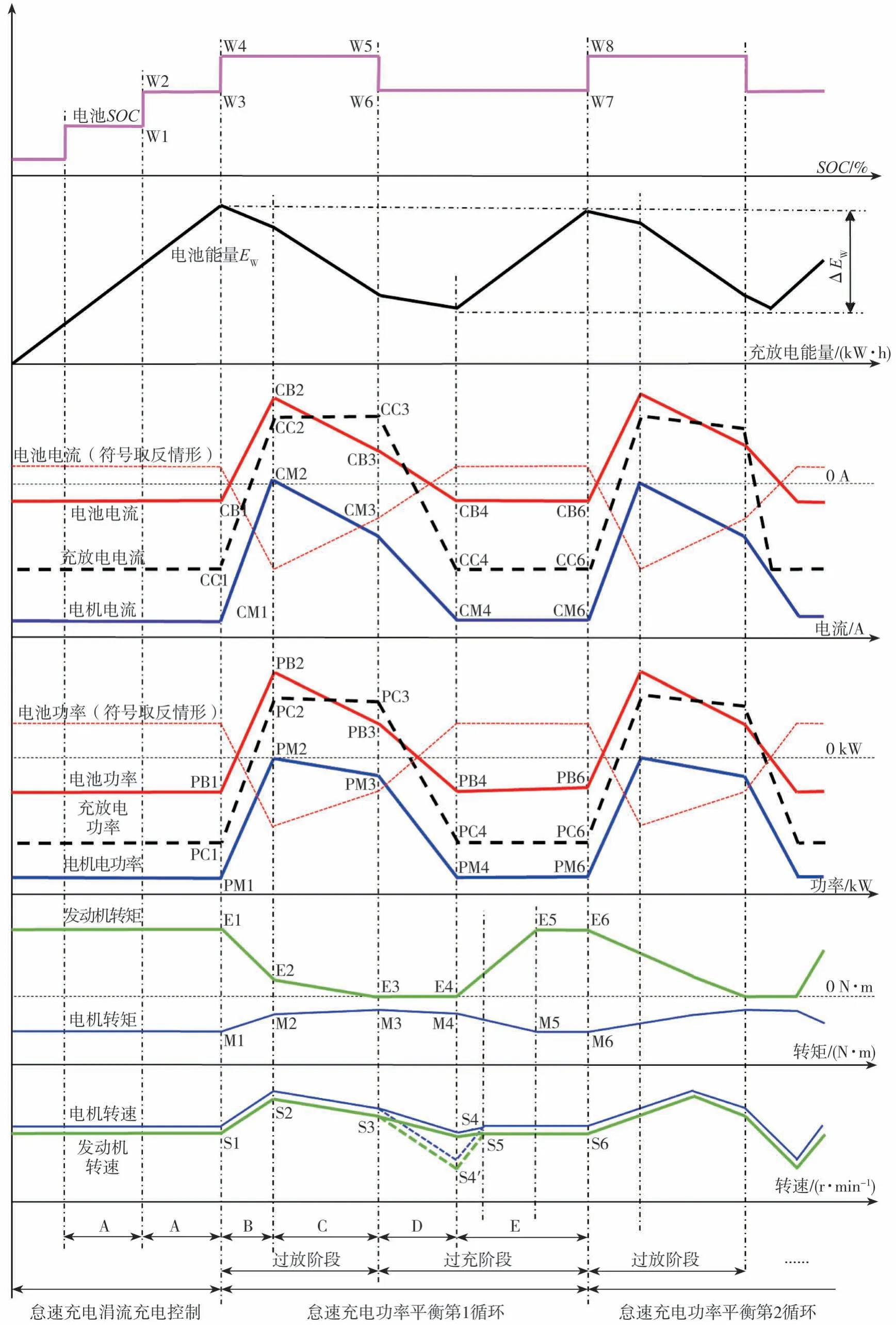
圖3 怠速充電SOC平衡控制時序
電池能量的過充切換階段 在電池SOC 或能量達到控制目標最低值時,須對電池進行充電以滿足控制目標SOC 的要求,這一階段就是將電池能量從持續過放狀態切換到過充充電狀態的過渡過程。
電池能量持續過充階段 這一階段主要實現怠速工況發動機對電池能量進行持續充電以滿足目標SOC 或電池能量的控制。
另外,為進行怠速充電工況電池SOC 平衡性控制的估算,需要引入控制目標計算引用的相關參數定義,這也是后面分析控制過程目標計算的基礎和邊界,具體如下。
發動機轉速差響應能力系數:IEJK
電池至附件端等效電阻:RCB
電機至附件端等效電阻:RCC
電池SOC 的百分比:Ssoc
電池SOC 代表的能量:EW
電機機械功率與電功率的轉化效率:ηm
循環SOC 平衡性控制電池能量微過放系數:γ
2.2 怠速涓流充電控制
由于電池的單體電壓在未達到允許最大的電壓前,最好辦法就是采用恒流進行充電[5],因此在怠速充電涓流充電階段采用的是恒流充電作為控制目標。
A 階段:涓流充電控制
考慮到電池的SOC 與能量并非線性,因此需要根據實際SOC 上升的目標速率標定涓流充電的電池能量增量目標ΔEW。為實現涓流充電階段的恒流控制和充電速率標定可控,需要根據電池SOC 變化的能量梯度來計算電池凈充電電流ICB1。可計算A 階段的電池充入能量為
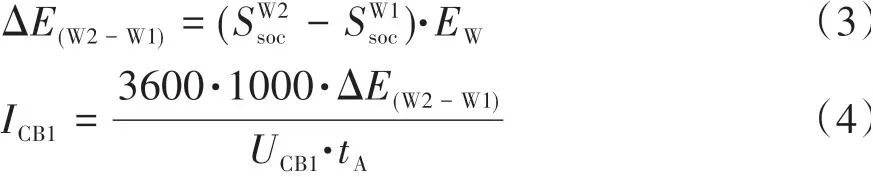
式中:tA為此階段的控制時間;UCB1為CB1 位置電池電壓;ΔE(W2-W1)為W2 與W1 代表SOC 跳變的電池能量差。
由電池凈充電目標電流以及考慮到怠速時發動機功率和電機功率穩定性最低值要求,可以計算出電池的目標充電功率PPB1、充放電功率PPC1和電機目標電功率PPM1為

式中:UW1為W1 處電壓;為電流充電控制最小電流;為發動機最低穩定功率;為電機最低穩定功率。
由式(7)電機的目標電功率并考慮到怠速轉速角速度波動可計算此時的電機轉矩和發動機凈輸出轉矩為
式中Δω為此階段轉速角速度波動量。
2.3 電池能量過放控制
當電池在涓流充電達到SOC 控制平衡點時,需要進行電池能量過放控制。由于電池真實的SOC 與混合動力允許使用SOC 并不相等,因此為控制混合動力的SOC 值保持恒定,須事先測試標定出進行SOC 平衡控制的過放和過充電池能量變化目標ΔEW。由于電池在過放控制一定是過充或涓流充電階段切換而來,因此電池能量過放控制在這一過程又分為切換到過放控制和持續過放控制兩階段。
B 階段:切換到過放控制
在切換到過放控制階段,可以通過標定確定電機此時PPM2功率為0,將完全由電池進行放電滿足附件用電的需求,由此可計算出充放電等效功率和電池的目標電功率為
由式(11)的電池目標凈過放功率和電池的電壓可以計算出電池的目標過放電流為

在此階段一般標定控制電機的電功率為微小的值,如標定為0 kW,由此可以計算電機的機械目標轉矩為

為防止因發動機怠速轉矩迅速降低而帶來的發動機熄火風險,在實際控制中S2 轉速可作適當增加,例如增加25 r/min。由此可以計算出發動機目標凈輸出轉矩為

在實際控制中,為修正發動機機械功率的變化落后于電機功率變化而造成控制上的振蕩,此階段的控制時間需要在正常標定切換時間與發動機機械變化的最小時間取較大值,即

C 階段:持續過放控制
在持續過放控制階段,通過電池的過放功率進行持續放電。從控制上講,考慮到電池過放和過充頻繁切換而造成動力總成的反復調節,因此需要定義B 階段和C 階段聯合起來的過放階段的最低過放時間。另外,考慮到長時間累積效應和電池溫度等影響,工程上的實際做法都讓電池處于SOC 平衡循環微過放狀態,定義電池能量微過放因子γ。因此可以得到C 階段的控制持續過放時間為
根據上述的B 和C 階段電池的凈放電功率的積分,可以計算出過放總能量為
由式(18)電池過放能量就可以得到持續過放結束時電池的目標電流為
由于此過程同時存在電池放電電流和電機的充電電流,并考慮到附件功率可以估算出充放電的等效功率為

由式(20)的充放電等效功率可以得到電機的充電目標電功率為

考慮后續怠速充電從過放階段切換到過充階段,發動機的轉速也需要回到怠速的目標轉速的要求,因此在此階段S3 可標定為超調怠速轉速的60%左右,作為怠速功率控制目標來進行控制,結合式(21)中的電機目標電功率可以得到電機的機械目標轉矩和發動機的目標凈輸出轉矩為
2.4 電池能量過充控制
在電池能量過放控制后,電池的SOC 值將在控制精度允許的范圍內下降到SOC 平衡能量的下限值。為使電池的能量波動在控制允許的平衡范圍內,需要將電池的過放控制轉變成過充控制。該過程可分為切換到過充控制階段和持續過充控制階段。
D 階段:切換到過充控制
電池由持續過放控制切換到過充控制的充電電流不僅要考慮到定義最大過充電流,還要考慮到整個怠速工況下SOC 平衡控制過放與過充調節切換的頻率,如果切換頻率過高容易造成動力總成的振蕩,因此切換到過充的目標電流可按下式作估算:
式中t(D+E)為D 和E 階段時間之和。
由目標過充電流可以計算出充放電的目標功率和電機的目標充電功率為
由電機的目標充電功率可以計算出相應電機目標機械轉矩和發動機的凈輸出轉矩為


由于發動機的機械響應要明顯慢于電機的變化,在實際的控制過程中經常會出現控制的瞬間超調現象,從而造成轉速被瞬時拉低現象,其轉速超調的范圍估算為
E 階段:持續過充控制
根據過充的時間和電池能量增加目標ΔEW可以計算持續過充階段結束時的目標電流為
如果要在持續過充階段對電池的充電電流采用恒流控制,即ICB6=ICB4,通過聯立式(30)與式(24)并考慮能量目標相等的關系,可以得到ICB4與ICB3滿足的關系式為
上式中持續過充充電時間tE在實際控制中還需要考慮最大充電電流和整個最少過充充電時間的影響,因此實際時間估算按下式進行:
由式(30)目標過充電流和附件功率可以計算出充放電等效功率和電機的目標電功率為
由式(33)可以得到電機的機械目標轉矩和發動機的目標凈輸出轉矩為

2.5 電池SOC平衡循環控制
在完成上述電池SOC 能量平衡控制一個循環后,由于怠速充電仍在繼續,因此基于電池SOC 平衡區間能量控制調節需要接著上一循環進行控制。但在控制設計時須考慮到一個循環開始和結束點電池實際充電能量不準造成的累積效應,因此須根據電池的實際SOC 變化調整累積能量的清零控制。具體的做法是在每個循環的持續過放階段和持續過充階段加入電池的SOC 監控,并根據SOC 值的變化來延長持續過放時間和持續過充時間。實測怠速充電SOC 平衡控制15 個循環下的過放和過充時間統計如表1 所示。
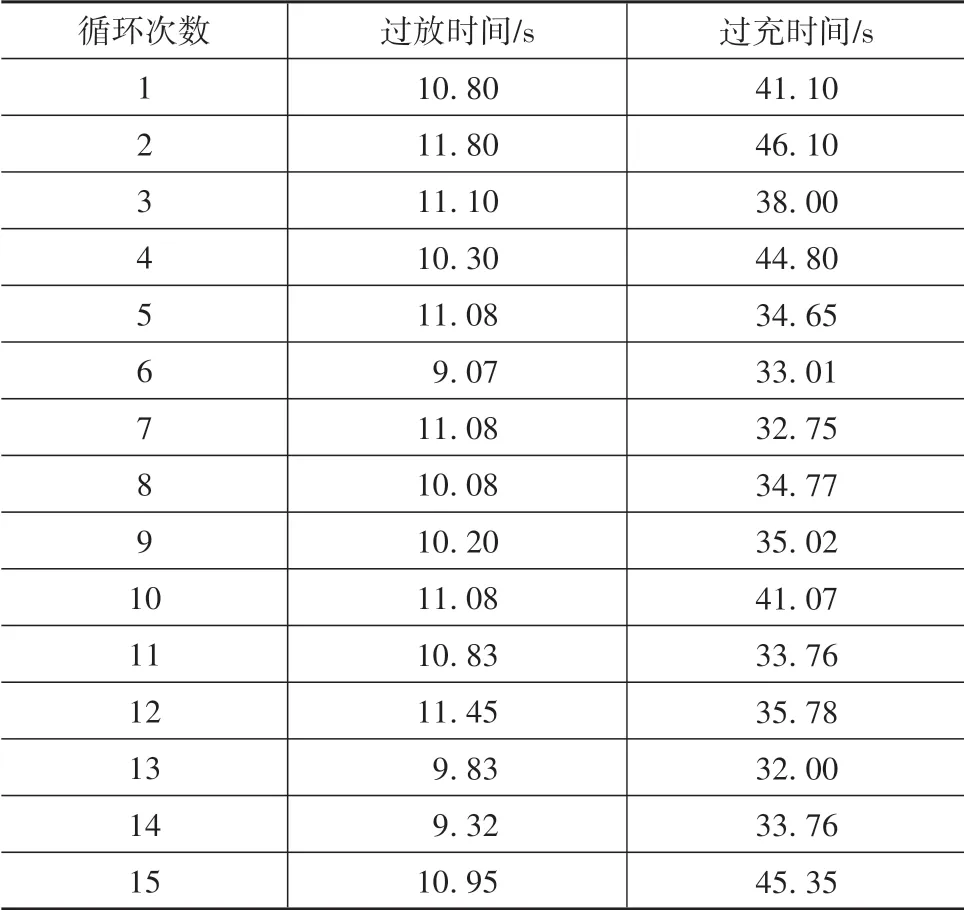
表1 多循環SOC平衡控制過充過放時間統計
3 仿真分析
對上述的怠速充電工況電池的SOC平衡能量控制設計進行仿真分析。以P2 構型為例進行仿真(取iEM1=1),并根據上述設計的控制策略和其控制目標的計算公式來控制關鍵點目標,設置表2 中的仿真參數作為模型的控制仿真輸入,并進行仿真計算。
考慮到簡化仿真的需要,定義發動機摩擦轉矩、電機能量轉換效率以及附件功率簡化為常值。同時考慮SOC平衡區間電池能量變化較小,電池的電壓變化非常微小,在仿真時取定值以簡化仿真模型。因此根據上述的各控制階段的時間估算以及考慮到過充和過放的切換頻率影響,標定如表3 中的各階段控制目標時間進行仿真。然后根據控制策略的控制目標值進行仿真。
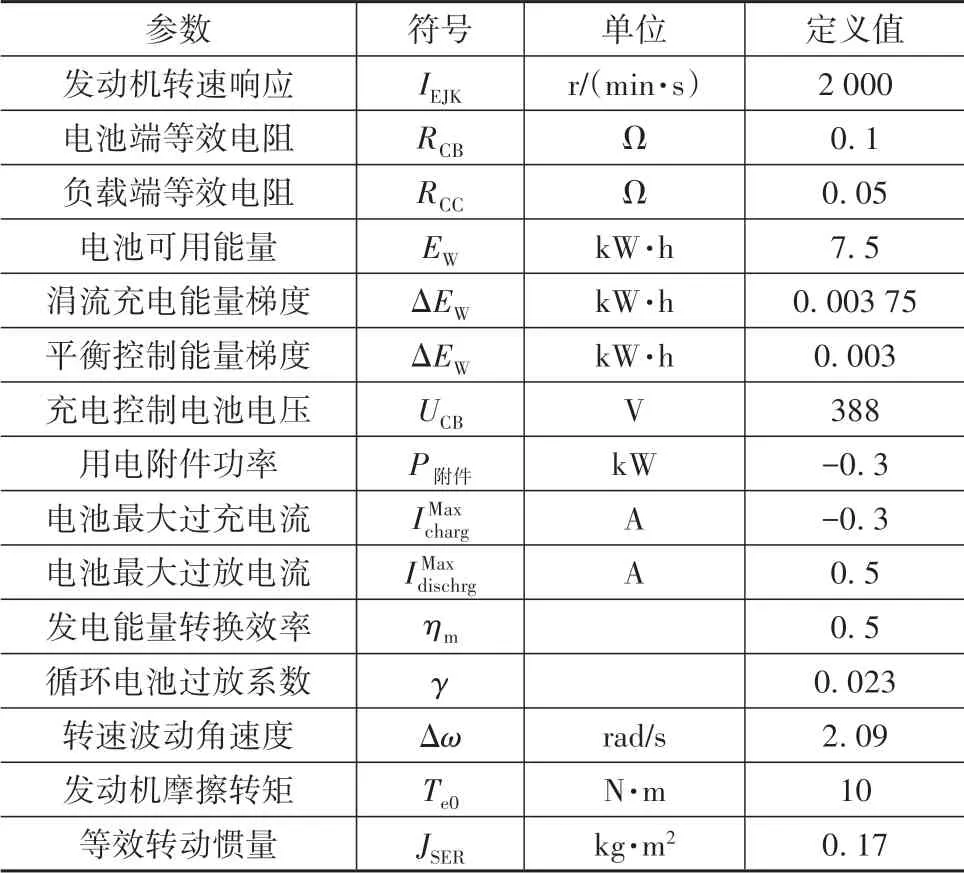
表2 仿真參數值定義
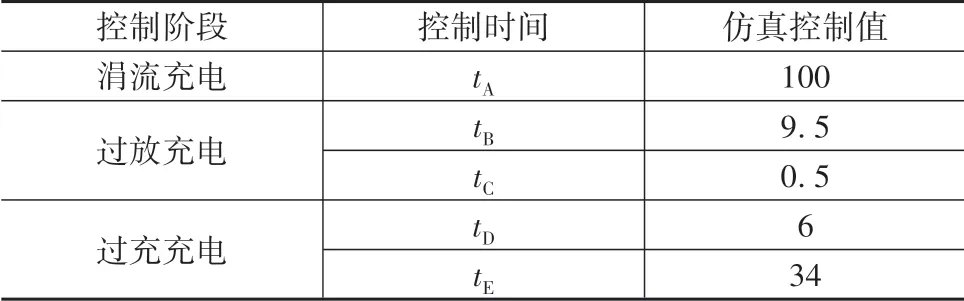
表3 標定仿真控制階段時間 s
將上述定義的參數輸入仿真計算模型,仿真出怠速充電工況下的SOC 平衡控制在涓流充電、充電過放階段以及充電過充階段的SOC值、電池能量、目標電流、目標電功率、目標轉矩和轉速等仿真信號數據,如圖4 所示。同時,通過仿真可知,在標定的階段控制時間內確實實現了電池SOC 的平衡性控制,這證明通過能量變化梯度為控制設計目標能很好實現怠速充電工況電池的SOC平衡能量控制。
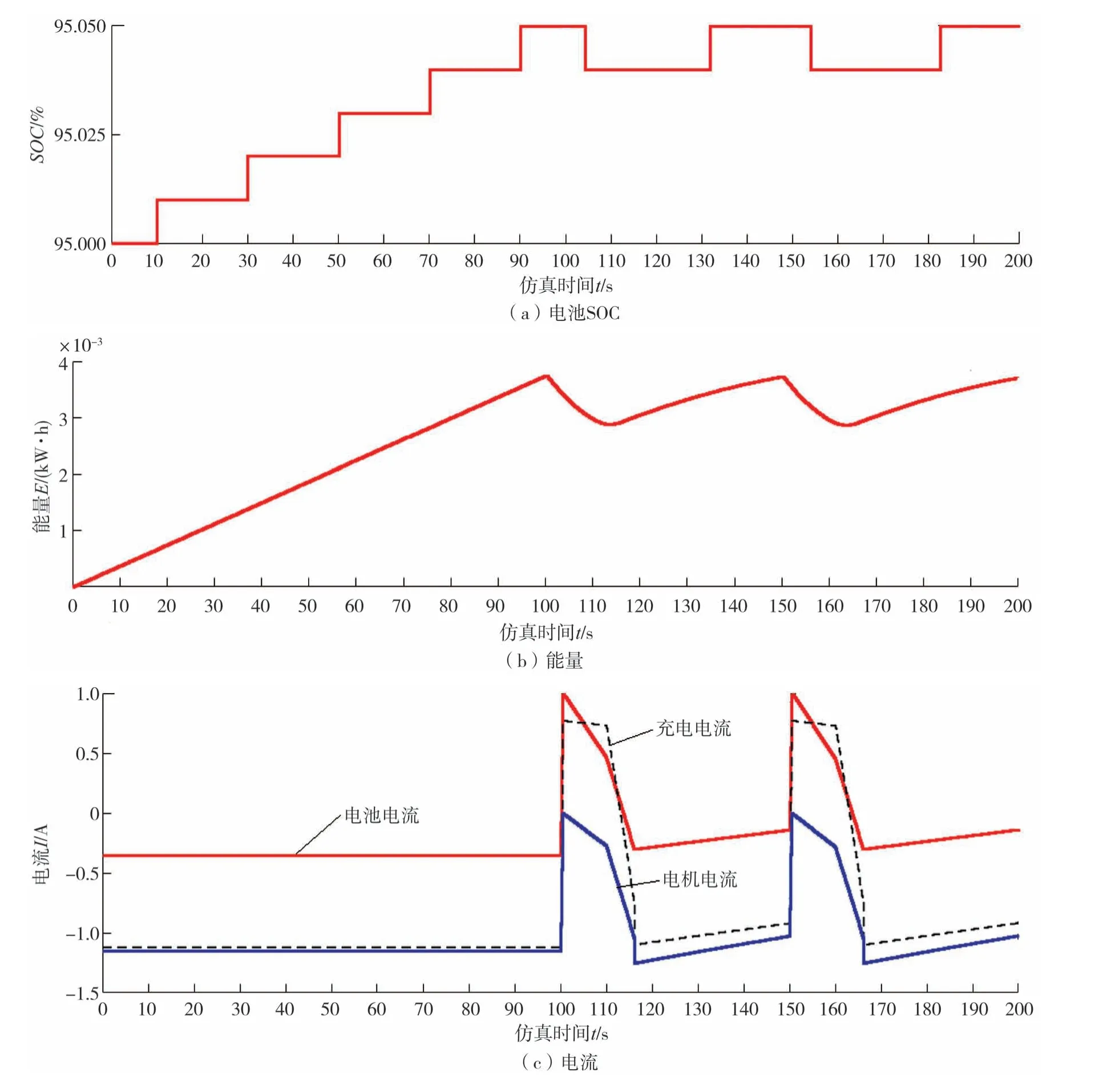
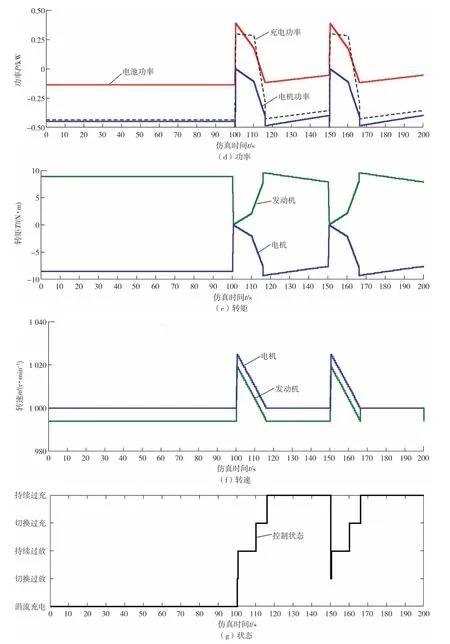
圖4 怠速充電工況SOC平衡控制仿真結果
4 實車驗證
將上述怠速充電工況SOC 平衡能量控制策略應用到某一混合動力車輛控制軟件中。車輛通過聯合測試和標定,分別采集SOC、電流、電壓、轉矩和轉速等CAN 信號數據,具體參數定義如表4 所示。然后通過電壓和電流或轉矩和轉速的乘積計算出功率值信號以及通過功率積分求得電池充放電能量信號的變化。
該SOC 平衡能量控制過程由混合動力控制單元根據電池的相關信號、附件功率信號以及部件參數按照控制策略的目標要求主動請求發動機和電機發出控制目標轉矩對電池進行過放和過充控制,數據顯示控制策略精確實現了電池在怠速充電工況下的SOC 平衡能量控制,具體如圖5 和圖6 所示。圖中兩條豎線①、②處的具體數值參見右邊表格中Cursor1和Cursor2列所對應的數值,圖中數字1,2,???,10 對應右邊表格中相應行的參數信號曲線。圖中左側坐標軸代表不同信號類的坐標值范圍(如電流、功率、轉速和轉矩等)。從圖5 中的實測數據可知,實車控制效果較好遵循了設計的控制策略的動力性要求,并有效控制了SOC 的平衡點(見電池SOC 和混合動力SOC)。另外,從圖6 的多個循環實測數據中,控制模型通過延長持續過放和持續過充的時間成功解決了單個循環電池能量累積的清零問題。另外,多個循環控制中電池的充放電能量長期處于微過放狀態,這從根本上排除怠速充電因為溫度和多循環控制能量不準的累積效應對電池帶來的安全隱患。
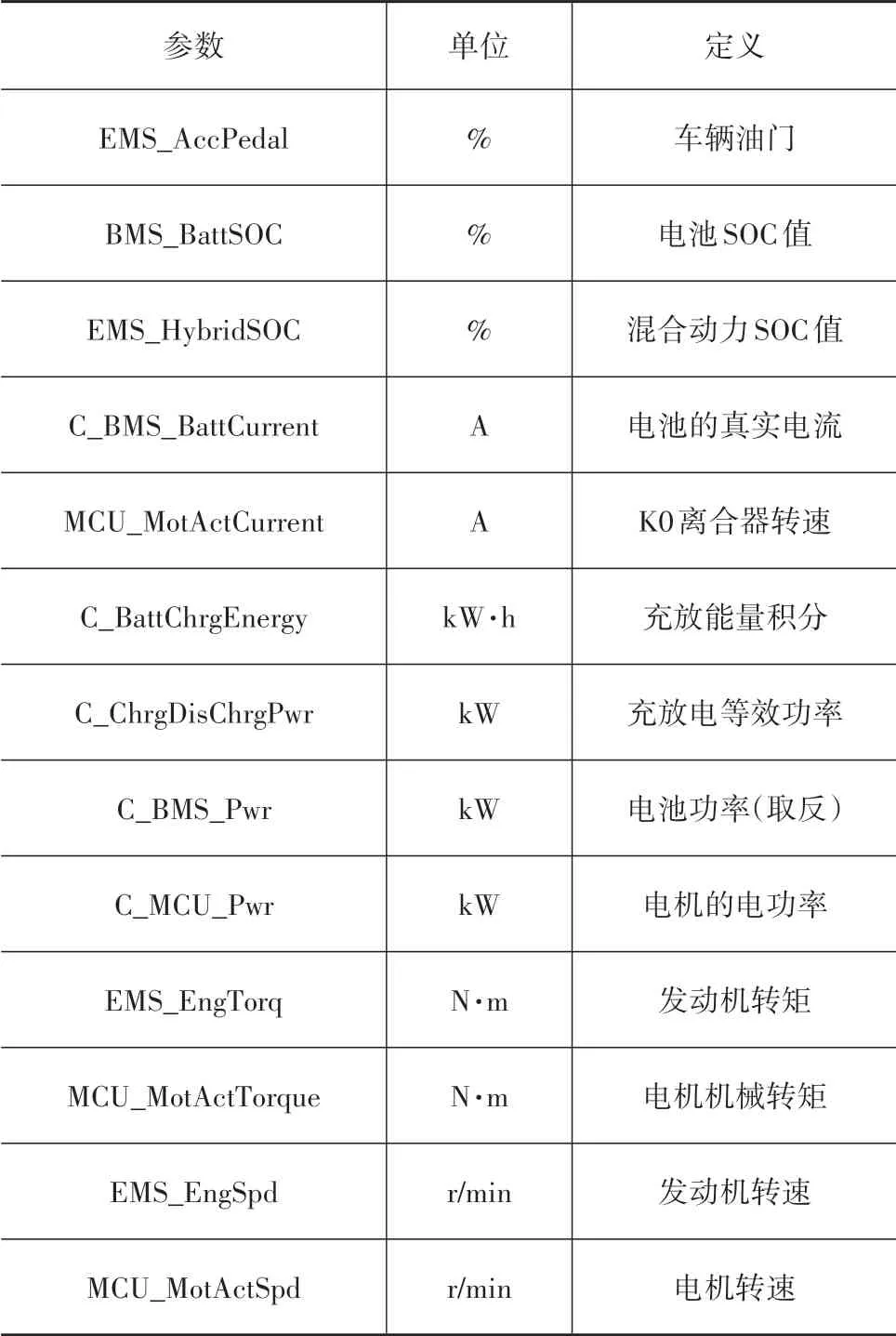
表4 測試參數定義
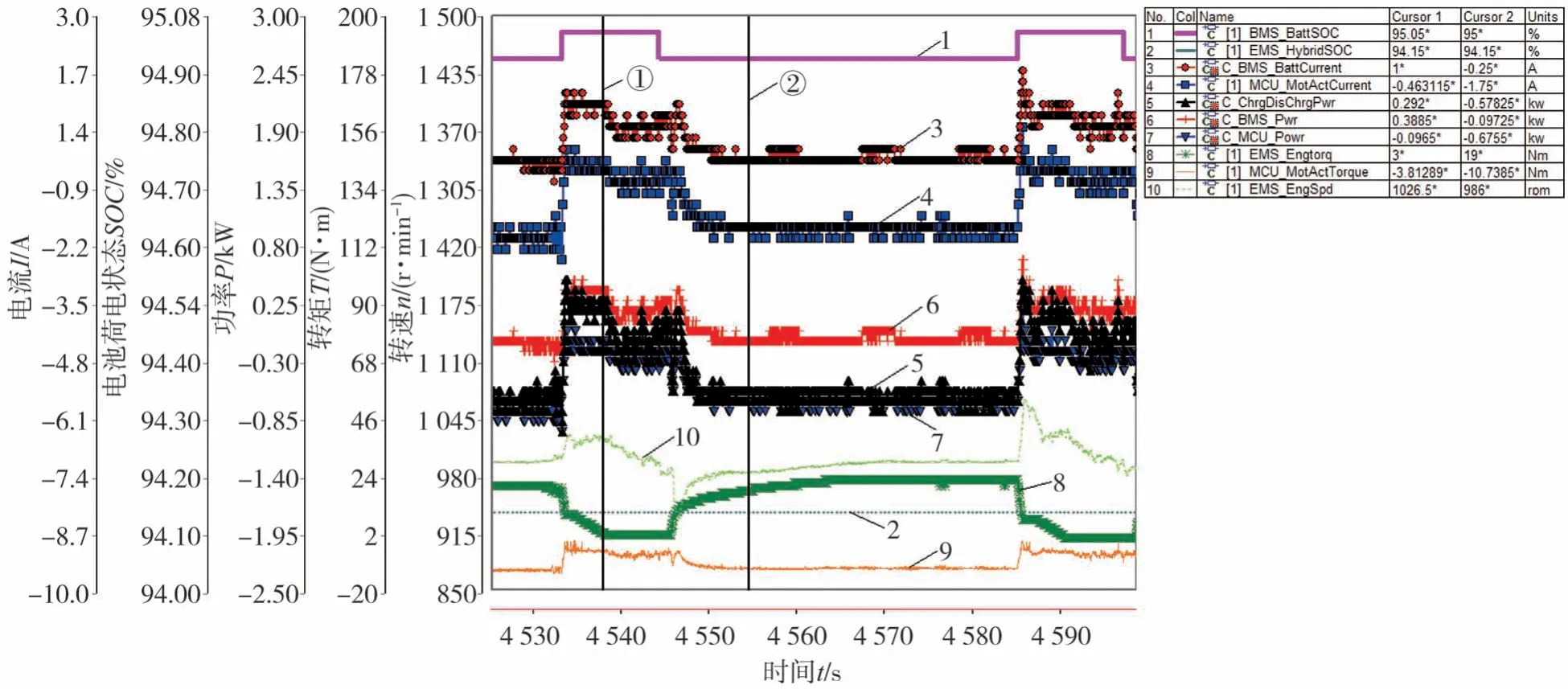
圖5 單個循環SOC平衡控制實測數據

圖6 多個循環SOC平衡控制實測數據
5 結論
從分析常用的單電機和雙電機的混合動力怠速充電模型出發,考慮到控制策略的通用性,設計出適應于多種混合動力構型的怠速充電工況下的電池SOC 平衡能量控制策略。由于參數差異和控制誤差的存在,動力總成控制無法準確提供附件用電功率以使電池完全沒有充放電現象,為此設計了一種通過主動過放和過充循環交替來實現混合動力SOC 的平衡點和電池能量波動范圍的精確控制。本文中不僅給出了控制過程目標點的動力計算公式,還通過仿真證明該方法的可行性。在將控制策略應用到實際車輛上時,通過實車數據采集和分析,可以較好地達到控制策略設計的目標要求。該策略非常精確地控制了怠速充電工況下的SOC 平衡點的電池能量波動范圍。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
